1. Introduction
The communication technique has become increasingly important in power electronics area with its developing tendency of standardization and integration. Accordingly, the network-based approaches, which could be implemented for the function extension and performance optimization, are adopted in power electronic systems.
In general, two approaches can increase the capability of network-based control system effectively in power electronic systems. One is the proper design of the suitable network management and network interface, and the other is the rational implementation of control strategy and transmission allocation of signals. For example, in order to realize the synchronization function among multi-inverters, PWM (Pulse Width Modulation) period counter value or synchronized pulse [
1] were allocated as transmission signals. Occasionally, not only single data, but also multi-variable may be sent simultaneously via multicast transmission. Paper [
2] introduced a control method in microgrid, where grid current
igrid, grid voltage amplitude
vgrid_pk and phase
vgrid_θ are packed into CAN (Controller Area Network) bus to facilitate the output quality and smooth transition from grid-connected to islanded mode. In this sense, in order to expand communication capacity to adapt the increasingly transmission speed and various signal type, some significant efforts had been done. Double-interface with USB and CAN was developed in wind-turbo power electronic system [
3], or the wireless networks with radio frequency were tried in speed control of induction motor and spatial distribution DC-DC parallel systems [
4,
5]. The possible communication standard and interface for the future microgrid were outlined in previous work [
6]. Although they could bring some advantages like high transmission speed, other issues like high hardware cost and severe electromagnetic interference still hinder its wide utilization. It is more realistic to take full advantage of currently available communication facilities.
Besides the extensive use of network, network-based control can also be utilized to further improve the performance of power electronic systems. However, the use of communication networks usually introduces some challenging issues. For example, the limited bit rate of communication networks would lead to network-induced delays or packet dropouts. These issues are generally regarded as sources degrading system performance or destabilizing the system, even though some positive effects of network-induced delays exist in network-based system [
7]. Since it might be complicated to update the advanced communications for decreasing the delays, we may embark on doing some realistic work to adjust changing network conditions, such as altering transmission and data dispatching modes, or modifying the control strategies of power electronic converters. Paper [
8] proposed two algorithms to decrease the impact of transmission time-delay on sensor signals. Time-delay is regarded as constant by setting synchronization trigger signal and time-table for receiving plant. Another method is to estimate sensor data and next sampling time. In order to compensate the effect of time-delay, some strategies are frequently employed, for instant changing PWM carrier-wave or time offset, as reported by Reference [
9]. In this case, it is inevitable to change the hardware as timer clock or communication interface with the aid of software, as introduced in a three-phase Boost converter system using PEBB (Power Electronics Building Block) communication standard [
10]. In those techniques, the saving time-delay may not be worth the effort or cost having been put in the hardware and software.
A traditional step is to predict the effect and build the mathematical model with the time-delay [
11,
12]. For power electronic converters, the stability analysis with communication time-delay tends to be investigated based on switching period, the solution of stability function is obtained from different switch states under time-delays in the same time axis [
9]. The research was extended to a DC/DC parallel operation with wireless communication. Through using the time-delay stationary model and its related restriction conditions, the stability can be determined through state average model of closed-loop [
5]. Other work focused on the calculation of stability boundary, piecewise linear model with time-delay is one of the common methods [
4]. The direct way is to achieve from experiments and simulations, observe the output results under different time-delay [
13,
14]. However, the application of these stability analysis to power electronic systems is always based on relatively constant time-delay, time-varying delay is rarely considered. Although time-delay sometimes is detrimental to the stability and performance of the control system, allowing higher allowable time delay leads to efficient utilization of communication network’s resources [
4]. How to achieve optimal compromise between performance improvement and allowable communication speed becomes challenging in network-based power electronic systems. In addition, there are few reports about systematic analysis of time-delay impact on power electronic systems in the previous work.
With the increased concerns on environment, more and more renewable energy sources, such as wind turbines and photovoltaic cells, are integrated into the grid and formed distributed generation (DG) units. These DGs are normally interfaced to the grid with power electronic converters such as DC-AC inverters. To overcome some problems, such as system resonance and protection interfaces, the concept of AC microgrid is presented to realize the flexible coordinated control among DG units. The microgrid can operate in either grid-connected mode or islanded mode. In islanded AC microgrid, load demand must be properly shared among DG units. On some occasions, this topic is probably turned into inverter parallel operation. Conventionally, the frequency and voltage magnitude droop control method are employed, which can obtain AC microgrid power sharing in a decentralized manner [
15,
16]. Many advanced methods based on droop control had been reported for inverter parallel operation [
17,
18,
19]. For example, VPD/FQB droop control is proposed in to offer an improved performance for controlling low-voltage AC microgrid with highly resistive transmission lines [
20]. However conventional droop-based control method has the problems of slow transient response, line impedance dependency, and inaccurate power-sharing. Some strategies were accordingly presented as Complex Line Impedance-Based Droop Method [
21], Angle Droop Control [
22], and Voltage-Based Droop Control [
23]. However, because not all issues can be settled by only one solution, the virtual impedance methods [
24] were proposed to further enhance current-sharing performance. Those methods for the parallel connected inverters were trying to avoid the dependency on communications. However, the load sharing of droop method is not good as that of methods with interconnections, and the simplicity inhered in the conventional droop method is invalid since many complex algorithms of droop method were presented. Network-based control schemes were proved to be effective for optimizing the performance of microgrids under high-penetration level of DG resources [
13,
25] are being used in inverter parallel operation as well. More accurate power sharing, higher reliability, and robustness can thereby be achieved [
14]. To obtain superior current-sharing performance both in steady and dynamic state, network-based control on droop-based method would be a good alternative. However, the possibly negative effect of time-delay generated by network transmission cannot be neglected, therefore it goes back to the original issue, i.e., how to estimate the quantity of time-delay and estimate its influence on system stability or performance, which is seldom considered in primary droop-based control in hierarchical AC microgrid. Recently, there are reports about how to use distributed control in microgrids [
26,
27,
28], which were focused more on secondary control, trying to decrease the communication links to achieve full-distributed manner. There is still a lot of research space we are required to fill using network-based strategies in primary control to better improve performances in microgrids, where communication techniques could be integrated into secondary control.
Inspired by the idea of weighting method and comprehensive evaluation methodology as mentioned in Reference [
29], a suit of analytical methodology for investigating the impact of network-induced time-delay on network-based power electronic system is proposed in this paper. Inverter-parallel operation in AC microgrid working with islanded is specified as research application, and two network-based control strategies are introduced for clarifying the relationship between current-sharing performance and network-induced time-delay. The analytical methodology toward the impact of time-varying delay is described as two scenarios, which is releasing more allowable time-delay as possible while keeping system satisfactorily stable and well-functioning and altering the feedback controller based on communication status to reverse its original instability.
This paper is organized as follows.
Section 2 provides a description of analytical methodology for evaluating impact of time-delay on system.
Section 3 proposes two network-based control methods for the multi-inverter parallel operation in islanded mode of AC microgrids and analyzes their sensitivity toward time-delay in regard to system stability.
Section 4 addresses the analytic approaches towards how to handle the time-delay, and the two current-sharing methods are contrasted to specify the methodology from the mathematical angle. Experimental results of the proposed analysis are given in
Section 5.
Section 6 concludes the main contribution of this paper.
2. Analysis Methodology for Impact of Time-Delay on Performance in Power Electronic System
We may have problems or challengers when we take advantage of the convenience of the communications in power electronic field. For example, the potentially negative aspects, such as time-delay and data dropouts, would somehow hazard the network-based control system or degrade the performance. The flow diagram shown in
Figure 1 includes an analysis methodology that explains how to deal with the negative effect of time-delay.
First, the “Preliminary Analysis” as indicated in
Figure 1 needs to be investigated. In a theoretical way, the mathematical model of power electronics system without considering network could be built in the form of discrete or continuous functions, by means of state-space averaging method, or circuit averaging method, etc. To achieve the desired accuracy, model may be necessary built with sampling period being several times switching cycles, which inherits the dynamically rapidity feature of power electronic systems. Then, the time-delay is introduced in models and how the model becomes if time-delay equal to or less than one sampling period can be observed theoretically. Since the model is transformed into discrete-time one with constant time-delay, the upper limit value of time-delay whilst guaranteeing system stable can be calculated by means of stability analysis criterion on time-invariant system.
Subsequently, a judgement based on the upper limit value of time-delay is loaded. If the upper limit value is less than one sampling period (marked as “Y”), that means the network-based control system is highly sensitive to the time-delay. As a result, we may boost the transmission rate of network. whereas additional network load is dramatically increased. In this case, we may need to study the alternative approaches to alter stability condition with given time-delay. The work could be started on the revision of data allocation method, network management, and so on. A potential solution to reverse its instability is to redesign the controller based on communication conditions.
On the other hand, if it is marked “N” (it means “No”) as shown in
Figure 1, i.e., the upper limit of time-delay is equal to one sampling period, in other words the possibility of allowing more transmission time-delay to keep system stable exists (the larger delay can be addressed as
, where
τk is the time-delay and
h is the sampling period). In this case, compared with augmented state vector for time-delay less than one sampling period in system model, which may be defined as
, the state vector becomes more augmented,
. Meanwhile, one question related to larger time-delay will be asked: How much delay the system can tolerate? Moreover, more allowable time-delay will facilitate the reconciliation of communication efficiency and transmission preciseness. In this analytical methodology, stability analyzer and time-delay boundary estimations will have contributions to continually release more network resources. As seen in
Figure 1, system with larger or smaller time-delay has their own processing method in this methodology. They can be collected to provide the design rules for network-based control system in power electronic area, and the flow direction is addressed with red arrow in
Figure 1.
If the time-delay introduced by network is time-invariable and then static scheduling network protocols are envisioned (such as token ring or token bus) [
30], the model can be simplified to form the discrete time-invariable function. In the proposed analytical methodology, switching period being the basic time unit for analysis can facilitate the implementation of network-based control on power electronic system, which is originally designed by digital controller with possible sampling equal to switching cycle.
3. Network-Based Control Methods for Inverter Parallel Operation
To characterize the merits of network-based control used in power electronic system, a number of inverters that can operate in parallel to share heavy loads and communication link, which can be equivalently regarded as islanded mode in AC microgrids, are constructed, and addressed in
Figure 2. Information data of the inverters can share each other through network link. The network protocol should be designed by the feature of transmission data and Medium Access Control (MAC) of network [
30].
The AC/DC inverters operating in parallel mode are equivalent to voltage source inverters (VSIs). The controller includes voltage/current control loops and droop control method. If the link impedance and output impedance are considered inductive and the equivalent circuit for two inverters in parallel are shown in
Figure 3, the active and reactive power injected to the bus by every unit are expressed as follows [
31]:
where
En and
U are the magnitudes of the nth inverter output voltage and the common bus voltage respectively,
is the power angle, and the sum of output impedance and link impedance is
, where
is the equivalent resistance and
is the equivalent inductive reactance for the
nth inverter.
Considering a small phase difference between
En and
U, it can be seen from Equations (1) and (2) that the active
Pn is strongly dependent on the power angle
, while the reactive power is mainly influenced by the amplitude difference
En-
U [
31]. Consequently, most wireless load sharing controllers introduce artificial droops into the output voltage reference. The frequency and the amplitude of the inverter output-voltage reference can be expressed as
When the difference of sum of output impedance and link impedance in the two inverters is small, the circulating current can be eliminated by balancing the active and the reactive power. Therefore, we choose active power P and reactive power Q as the transmission signals in the network-based control system. In the following section, two current-sharing strategies based on droop control are presented, the difference between them is mainly reflected as to the extent to which current-sharing performance can address the impact of time-delay.
It is essential to calculate power variables
Pn/
Qn before completing droop control. In general, they are obtained from instantaneous power passing through low-pass filters (LPF) with a smaller bandwidth than that of the closed-loop inverter. Due to the existence of different power, two network-based control strategies for inverter parallel systems are proposed and indicated in
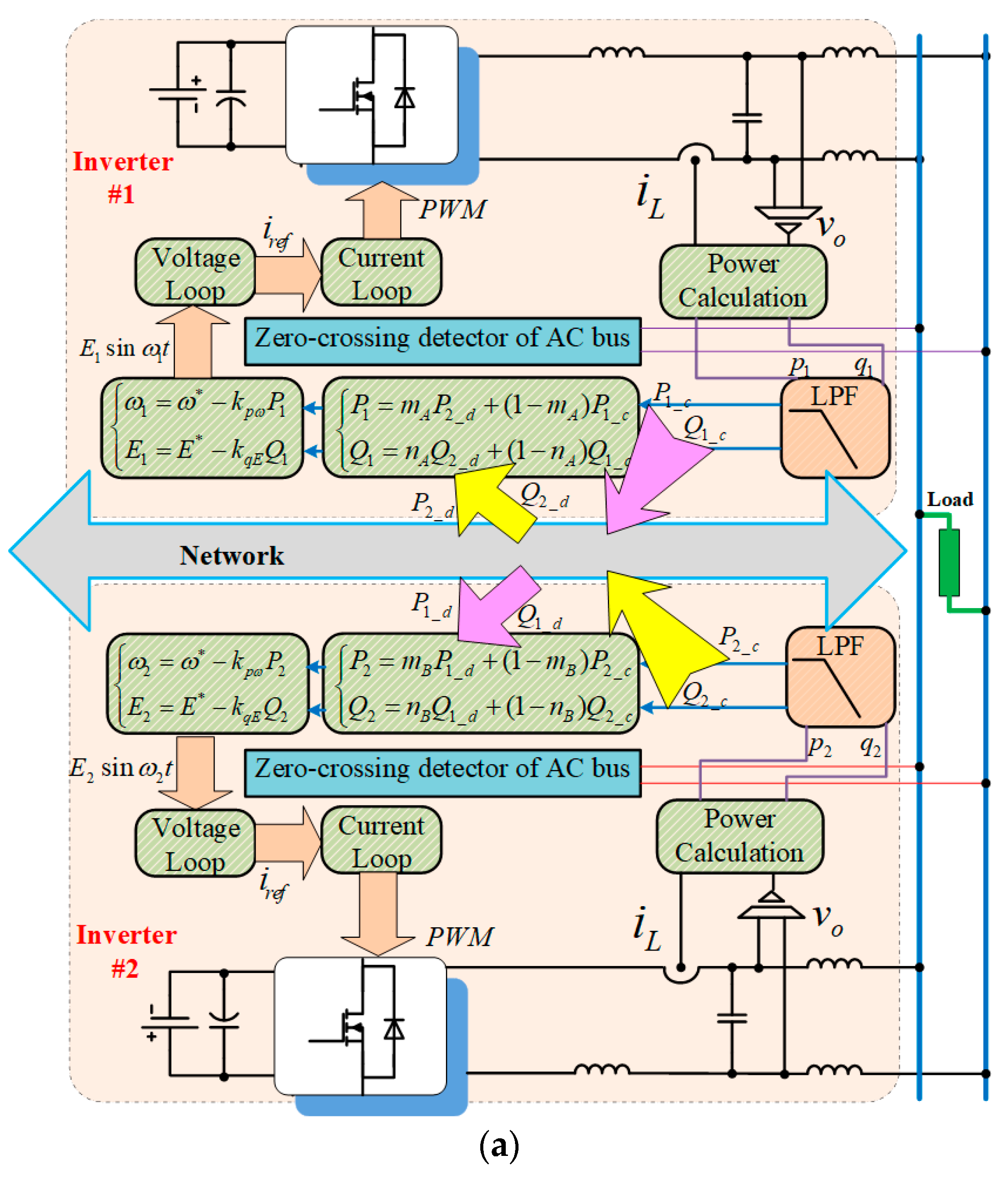
Figure 4, labeled as Steady Power Method (SPM) and Transient Power Method (TPM), respectively. From the view of transmission mode, the communication is conducted by every inverter and there is no relationship for them as clearly defined as master/slave (autonomous mode).
3.1. Steady Power Method (SPM)
The Steady Power Method (SPM) is shown in
Figure 4a, and the two-inverter parallel system is used to illustrate its principle. The power transmission over network are averaged one after passing through LPF for conquering disturbs. The control power
Pn/
Qn are obtained by creating a weighted form of its own data and communication data, presented as follows
Assume that n = 1,2 represents the number of the inverter, mA, nA, mB, and nB are weighted coefficient for indicating the proportion of network data participating in control of each paralleled inverter, which are all available for autonomous regulation and amplitude limited within 1.0. For example, mA represents the ratio of network-obtaining active power P2_d of inverter #2 in control active power P1 of inverter #1. Pn, Qn are the final active and reactive power for droop control, Pn_d, Qn_d are the power data received from network, and Pn_c, Qn_c are the calculated power on-line derived from output current and voltage of inverter, respectively. The droop control is implemented by each inverter and followed under control function (3).
From
Figure 4a, we can deduce that if there are no time-delays and data dropouts during transmission, i.e., lossless network, it should have
The data flow on either side of the network follows the directions arrow with the same color, which is marked by pink and yellow color in
Figure 4a.
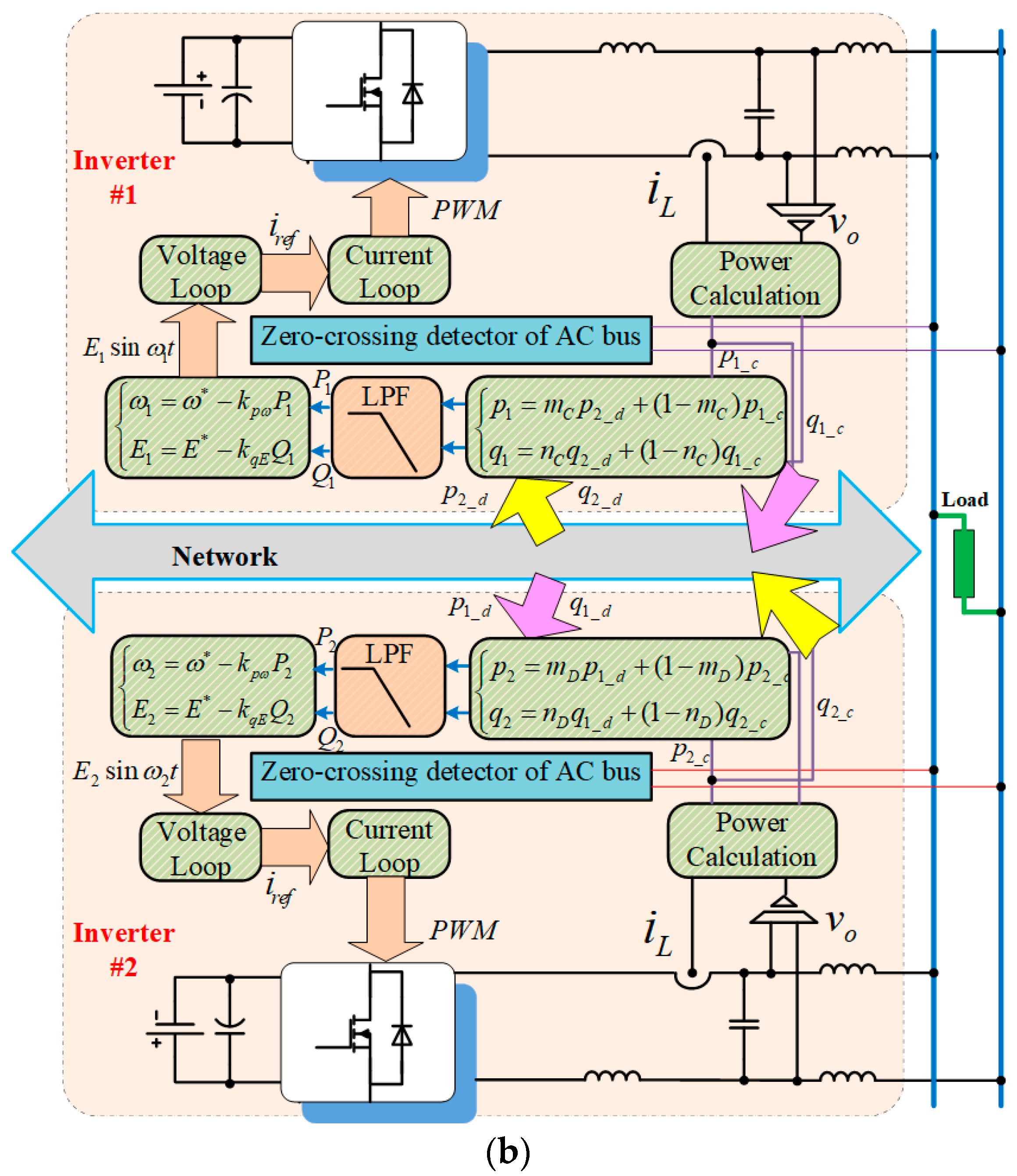
3.2. Transient Power Method (TPM)
Another method, the Transient Power Method (TPM), with the example of the two-inverter parallel system, is shown in
Figure 4b, where each inverter has two kinds of transient powers (active and reactive power) transferred to communication bus. The transient power is obtained from the calculation based on sampling output current and voltage of the inverters. Once each inverter obtains the power data of others from network, a weighted process towards output instantaneous active and reactive power is activated and served for obtaining control power by Low-Pass Filters (LPF). This weighted function is defined as
The new
pn/
qn (n = 1, 2 are the sequence number of the inverter) are the weighted results of transient active and reactive power of each inverter,
mC,
nC,
mD, and
nD are the weighted coefficients for describing the proportion of network data in power control,
pn_c,
qn_c are the power calculated by sampling voltage and current for each inverter. Simultaneously, they are transmitted via network and received by other inverter by labeling by
pn_d and
qn_d. If on-line network transmission is successful, it will have
The weighted results of pn and qn are sent to LPF to get averaged power Pn and Qn, respectively, i.e., the ultimate power in droop control function (3). The data flow direction from one inverter to another via network is highlighted with pink and yellow as well.
3.3. Preliminary Analysis: Sensitivity of Time-Delay for Two Methods
Based on the description in
Section 2, whether the communication-induced time-delay is larger or smaller than one sampling period, the basic stability of system within one sampling period could be investigated, which had been marked as “Preliminary Analysis” in
Figure 1. A linearized discrete-time model is adopted to describe these two strategies, their state space functions are addressed by (A5) and (A9) in the
Appendix A.
Considering the case of time-delay of each sample,
τk, being less than one sampling period
h, the system equation can be written as
where
is piecewise continuous and only changes its value at
kh+
τk. When the system is sampled with period
h, it can be obtained by
where
,
,
.
Defining
as the augmented state vector, the augmented closed-loop system is [
32],
where
In this case, we can use the exponential stability criterion, to judge whether is a stable Schur matrix. To explain the “Preliminary Analysis” in the proposed methodology with the example statement and investigate the sensitivity of time-delay on these two methods, the implementation schemes are provided below.
Test for SPM: (1) Average power filtered by LPF is transmitted through CAN bus and the sampling period is 150 μs; (2) the link impedance and output impedance are inductive; (3) to simplify the control analysis, we suppose the control coefficients satisfying mA = mB = mS = 0.3, nA = nB = nS = 0.6.
Test for TPM: (1) Instantaneous power is transmitted through CAN bus and the power sample period is 150 μs; (2) the link impedance and output impedance are inductive; (3) the predefined control coefficients mC = mD = mT = 0.2, nC = nD = nT = 0.3.
The main parameters are presented, and the specification for paralleled inverters is: RL = 50 Ω, XL = 0.02 Ω, X1 = X2 = 0.628 Ω, , , and droop control coefficients are: kpω = 7.5 × 10 − 4(rad/(W∙s)), kqE = 3.5 × 10 − 3(V/Var).
Analysis methodology discussed in
Section 2 tells us that no matter how much the actual time-delay is, the rough estimation of stability within one sampling time could be carried out. Returned to the strategies proposed in
Section 3, stability analysis becomes multidimensional due to the existence of control coefficient
mS,
nS,
mT,
nT, and time-delay
τk. The boundary curves used for addressing the upper limit time-delay maintaining system still stable are obtained by Schur criterion, as shown in
Figure 5. The result reveals that the stability features of SPM and TPM towards time-delay are remarkably different. In SPM result as depicted in
Figure 5a, where three-dimension coordinates are adjustable coefficients
ms, n,
s and maximum allowable time-delay, there are few cross-columns with different depths to show that only these regions with particular
ms/
ns combinations have relatively large allowable time-delay, the rest area is covered by zero-close flat surface. It means network-based system stability is dominantly affected by time-delay in SPM. Nevertheless, in the TPM results shown in
Figure 5b, except only a small part of region showing the allowable time-delay is tiny, other upper value in the regional surface can be rushed into 150
μs, which could be even bigger if we release the 150
μs restriction. The conclusion can be drawn that system is less influential on the time-delay impact in TPM. From the angle of control, the system shows its susceptibility to the time-delay and the control parameters should be elaborately designed for
mS and
nS to keep system stable in SPM. On the other hand, control coefficient
mT and
nT still cannot be designed arbitrarily even system is basically regarded as delay-insensitive in TPM. In addition, the stability criteria described in this section is used to reach a guidance conclusion on the qualitative analysis of time-delay impact. The quantitative accuracy is dependent on the precise model of power electronic systems and the theoretical analysis methods we are seeking.
4. Two Analytical Paths to Handle Time-Delay Impact
Since time-delay could possibly generate the negative errors for the control system and may severely damage system performance or stability, the feasible way is to eliminate or shorten the inherent delay but it’s possibly impracticable. Therefore, there are two paths (Path 1 and Path 2, framed in
Figure 1) that can be traced when confronting the impacts of time-delay guided by the proposed methodology in
Section 2. The first path involves exploring the maximum time-delay while preserving satisfactory performance so that more network capacity could be released. The transmission load would be decreased and correspondingly the system could be optimized in cost and reliability. In addition, when we find the network-based system is highly sensitive to the time-delay, besides network reselection and improved data-processing method [
16], redesigning the controller in accordance with specific hardware or network conditions is another effective plan. The main contribution of “Preliminary Analysis” is to classify the method into delay-insensitive and delay-sensitive strategy according to their delay attribute. In this section, “Path 1” and “Path 2” addressed in
Section 2 are theoretically analyzed, with the concrete verification by two current-sharing network-based strategies proposed in
Section 3.
4.1. “Path 1” For Delay-Insensitive Strategy
Due to the different susceptibility to inherent time-delay during communication, the network-based control method can be categorized into delay-insensitive and delay-sensitive one. Based on the description above, TPM can be more viewed as delay-insensitive strategy. Because the maximum time-delay considered in “Preliminary Analysis” is limited to one sampling period, there is a substantial possibility for this kind of delay-insensitive system to have a larger allowable time-delay (maybe many time sampling periods) to ensure system stable.
As discussed in
Section 1, the network-based control tends to be a practical and easy-to-accomplish policy with prioritization of using the existing network tools. However, when it is employed in power electronic systems, the transmitted signals become complex and the required communication rate will be on an incredibly wide range. This is one reason why we define switching cycle as basic unit of sampling period, which was emphasized in
Section 2. The problems arising from the increasing communication collision would degrade the performance of power electronic systems and reduce the reliability. Meanwhile, we hope the desired transmission rate for control signals could be less than we expect so that more network resources can be released, so there exist a compromise between performance improvement and increase of allowable time-delay.
The “Path 1” gives one potential solution for delay-insensitive strategy. Since the allowable time-delay may exceed one sampling period, the desired performance under a relatively low transmission rate could be obtained. In this case the possibility of releasing more network load needs to be theoretically investigated, which offers greater potential under the circumstance of power electronic systems with high switching frequency. The stability analysis based on model-building will be converted into the one with large time-delay. One following example will illustrate how to estimate the quantity of allowable time-delay a stable system can tolerate.
Suppose the network-based control has one-channel feedback, variable (like inductor current
iL and output voltage
vo as shown in
Figure 4) sampling is running in time-driven pattern, which is easy to be acquired by digital controller. In addition, controller and PWM (Pulse Width Modulation) drive can be in either time-driven or event-driven operation, mostly dependent on the communication mode and control design. If we define time reference as the data arrival time at PWM drive, the close network-based system can be described as
where
h is sampling period,
ik (
k = 1,2,3,…) is positive integer and
,
τk represents the time-consuming for data No.
ikh passing from sampling point to PWM drive, apparently there is a relationship as follows
Assume
u(
t) = 0 before the first control signal reaching PWM driven terminator. There is no data package dropout happens during no-loss transmission in proper order, {
i1,
i2,
i3,…} = {0,1,2,…}. When
ik+1 <
ik, it means out-of-sequence transmission happening and the controller is considered event-driven, the system can be rewritten as
where
η is upper limit value of {(
ik + 1 −
ik)
h +
τk + 1,
k = 1,2,…}. Equation (16) can be designed in network-based system with both time-varying and constant delays. To simplify the analysis and explain “Path 1” visually,
τk is defined as having bounded and non-constant attributes.
The stability analysis of system (14,16) is used to seek maximum time-delay to achieve stability and satisfactory performance. There are, of course, numerous mathematical methods that can be applied and stability criteria as well. Take one example, as for system (16), there are two alternative conditions are addressed as follows.
Definition 1: Suppose there exists constant α > 0 and β > 0 such that the solution for system (16) solution satisfies, the system (16) is exponentially asymptotically stable.
Criterion 1 [
33]: For a given scalar η > 0, suppose that there exist square matrices
P,
Mi,
Ni(
I = 1,2,3) and positive definite matrix
T > 0 such that (17) holds. Then, the network-based control system (16) is asymptotically stable as long as (
ik + 1 −
ik)
h + τ
k + 1 ≤
η,
k = 1,2,3,…,
where * is symmetric item of matrix.
As network-based control system with TPM is considered, A, B and K are derived from state-space function (A9).
4.2. “Path 2” For Delay-Insensitive Strategy
Based on “Preliminary Analysis,” “Path 1” is created for delay-insensitive strategy to achieve the balance between performance and network burden, as outlined in
Section 2. Nevertheless, more increased efforts need to be done to enhance the stability and performance of delay-sensitive strategy with considering the vulnerability features of network. In addition, it is necessary to investigate how to minimize the performance impact of the network with fast transmission speed, which is mostly built based on high frequency characteristics in power electronic system. “Path 2” framed in
Figure 1 provides one creative direction on modifying the system based on small time-consuming network conditions. The reformed ways can be changing controller, network management or data allocation method, etc. However, there are few studies on these currently, especially in power electronic field. Therefore, as an exploratory research, one possible theoretical solution for delay-sensitive strategy, where control coefficients and gain are redesigned based on the bounded and random time-delay, is introduced.
In general, the mathematical model and statistical disciplinarian of time-delay need to be known in advance, giving it mathematical representation, such as Poisson Process, Markov chain and ARMA (Autoregressive moving average) model, and so on. However, in actual network environment, time-delay always exists in random style. As discussed in
Section 3, there is the greater possibility to have the stability issues when transmission collision is increased, and time-delay feature is unknown, which it is normal for network-based control used in high-frequency power electronic system. Narrowed at network-based control strategies shown in
Section 3, for given control coefficients
mT,
nT, essentially feedback gain
K, the system is very likely to be unstable due to its delay-sensitive characteristics. Therefore, our purpose is to design a controller such that the unstable system is changeable. and the performance can be enhanced. Hereby the improvement of delay-sensitive strategy is started from the change of controller according to the time-delay attribute of network.
One possible way to analyze system with unpredictable time-delay is to converter generalized discrete-time model for controlled object into some types of linear discrete model with uncertainty, so that many existing mathematical tools can be available for use.
The stability of such a system (A22) having the measurable state variables is given by one of theorems.
Criterion 2: Assume that there exists symmetric positive definite matrix
P,
Q, scalar
, the network-based control system (16) with controller of
is exponentially stable if there exist feedback gain matrix
K such that
Through using MATLAB (MathWorks, Natick, MA, USA) and its Linear Matrix Inequality (LMI) toolbox to solve (18), we can deduce the calculation results based on the specification described in
Section 3,
B0,
B1,
H, and
F are obtained in matrices (A24–A27). Feedback gain matrix is modified to be
K, as rewritten in (A28).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










