An Analysis of the Impact of LED Tilt on Visible Light Positioning Accuracy



Abstract
:1. Introduction
1.1. Introduction on Visible Light Positioning
1.2. Expected Issues Considering LED Tilt
1.3. Paper Content and Structure
2. Materials and Methods
2.1. Channel Model
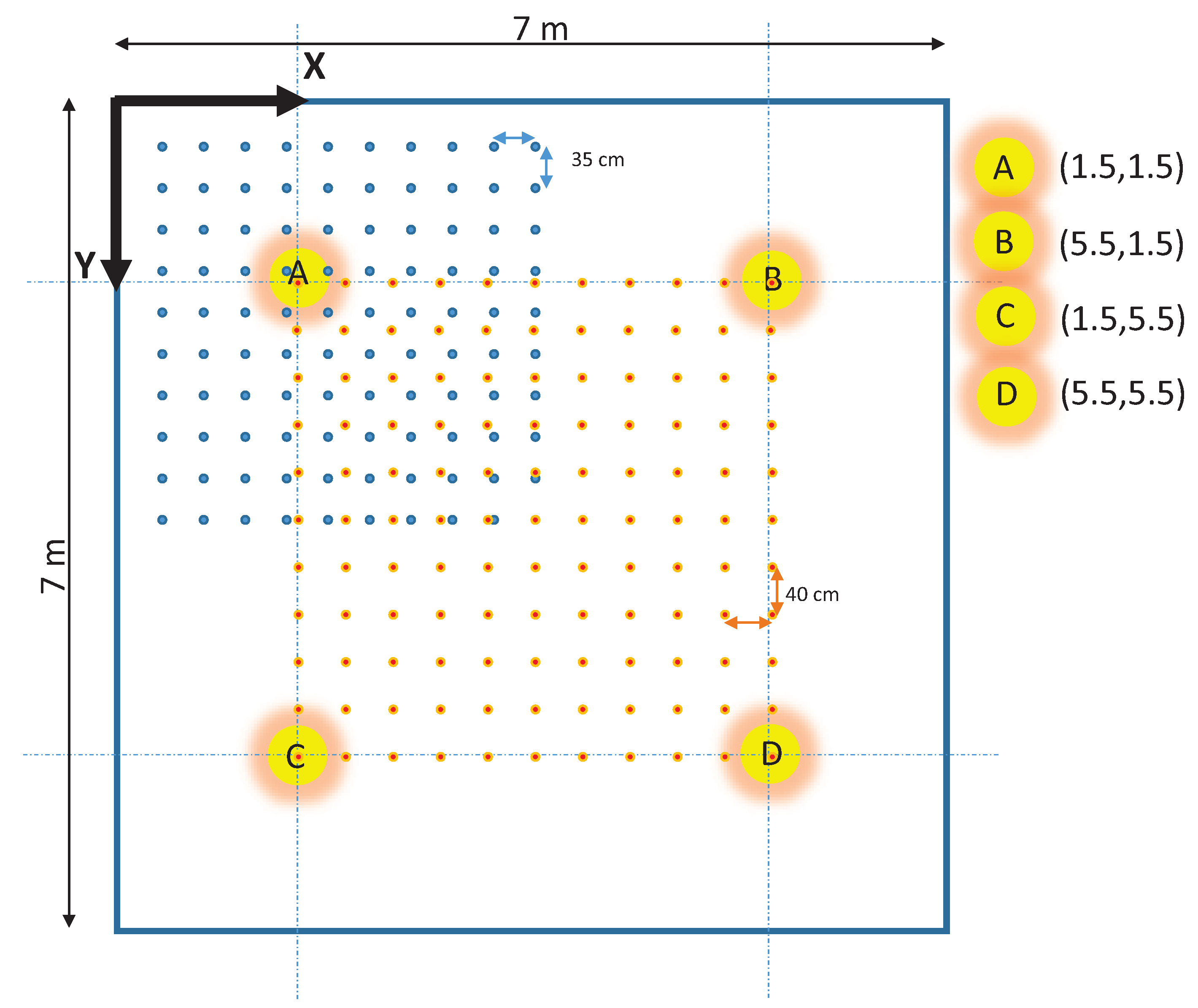
2.2. Simulation Configuration
2.3. Positioning Algorithms
2.3.1. Trilateration
2.3.2. Least-Squares Estimation
2.3.3. Normalized Least-Squares Estimation
2.4. LED Tilt Estimation Methods
2.4.1. Exhaustive Search
2.4.2. Quick Search
2.4.3. LED Tilt Estimation Scenario
3. Results
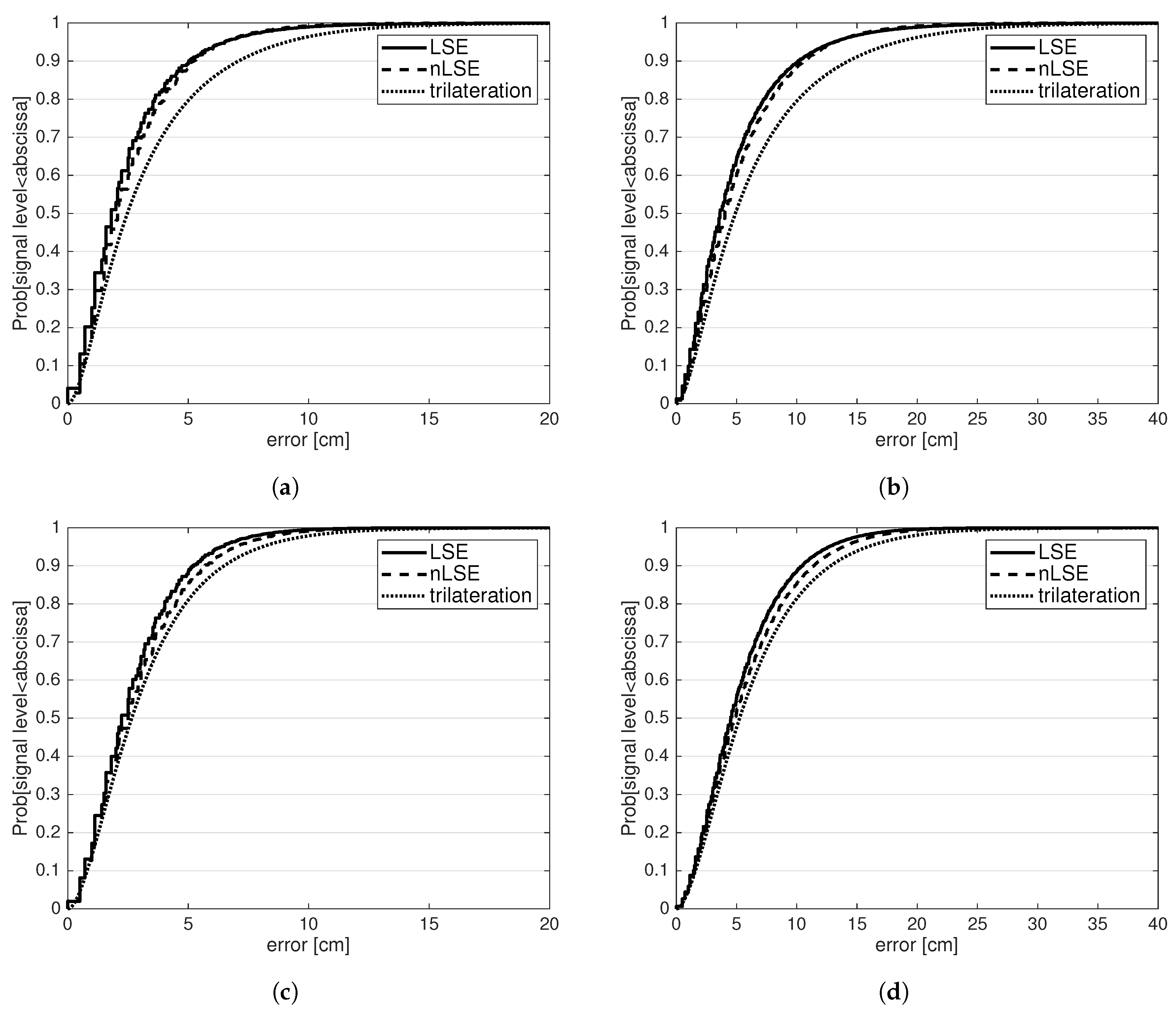
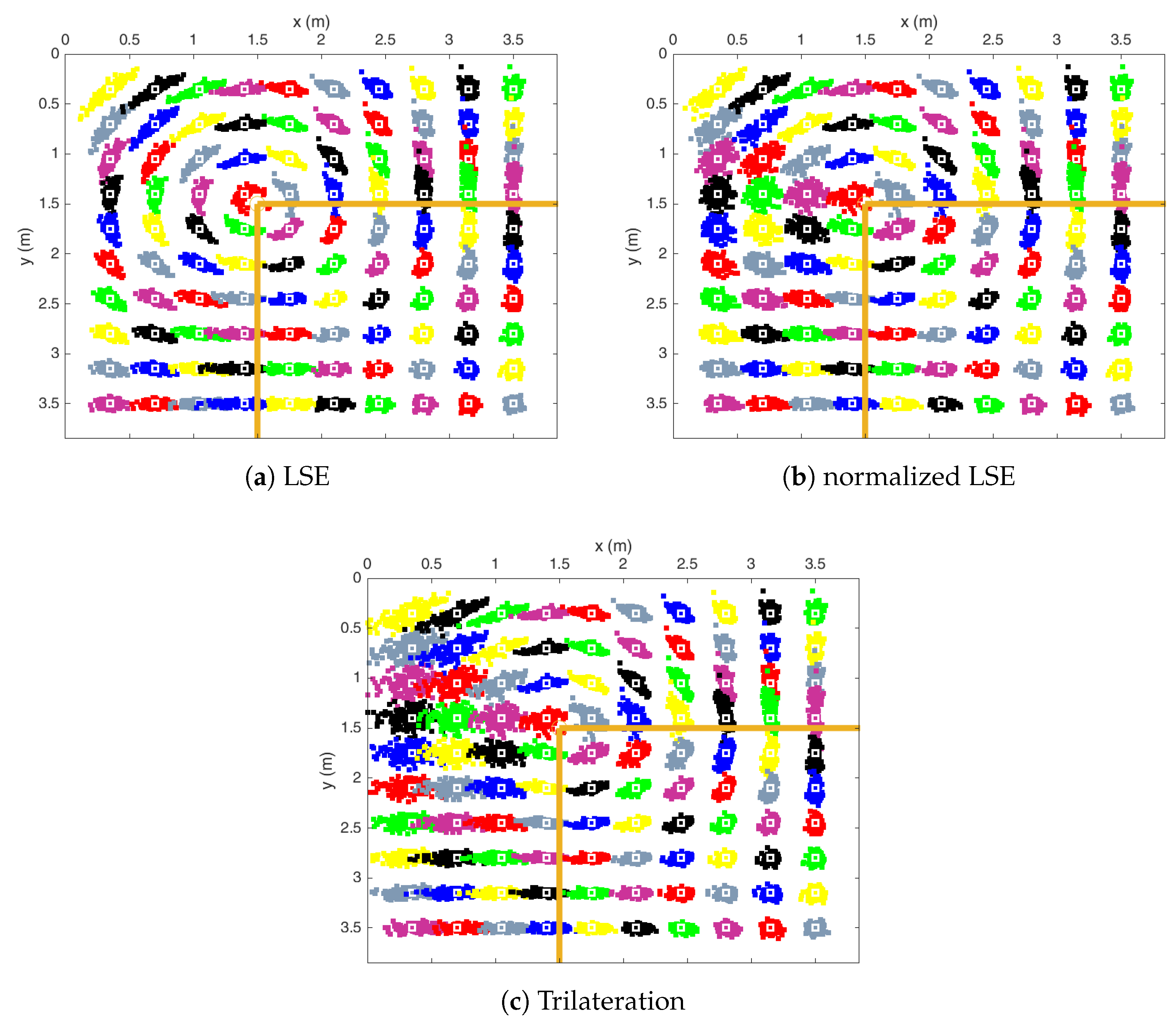
3.1. Assessment of LED Tilt Impact on Positioning Accuracy for Typical Configurations Using Different Metrics
3.2. LED Tilt Impact for Different Inter-LED Distances, LED Height and Tilt
3.3. Evaluation of LED Tilt Estimation Methods
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| LED | Light Emitting Diode |
| VLP | Visible Light Positioning |
| RSS | Received Signal Strength |
| PD | photodiode |
| VLC | Visible Light Communication |
| RSSI | Received Signal Strength Indicator |
| RF | Radio-frequency |
| cdf | cumulative distribution function |
| LoS | Line-of-Sight |
| LSE | Least-Squares Estimator |
| nLSE | normalized Least-Squares Estimator |
References
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible Light Positioning: A Roadmap for International Standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Jovicic, A.; Li, J.; Richardson, T. Visible light communication: opportunities, challenges and the path to market. IEEE Commun. Mag. 2013, 51, 26–32. [Google Scholar] [CrossRef]
- Trogh, J.; Plets, D.; Martens, L.; Joseph, W. Advanced Real-Time Indoor Tracking Based on the Viterbi Algorithm and Semantic Data. Int. J. Distrib. Sens. Netw. 2015, 11. [Google Scholar] [CrossRef]
- Mousa, F.I.K.; Almaadeed, N.; Busawon, K.; Bouridane, A.; Binns, R.; Elliott, I. Indoor visible light communication localization system utilizing received signal strength indication technique and trilateration method. Opt. Eng. 2018, 57, 016107. [Google Scholar] [CrossRef]
- Gu, W.; Aminikashani, M.; Deng, P.; Kavehrad, M. Impact of Multipath Reflections on the Performance of Indoor Visible Light Positioning Systems. J. Lightwave Technol. 2016, 34, 2578–2587. [Google Scholar] [CrossRef]
- Plets, D.; Eryildirim, A.; Bastiaens, S.; Stevens, N.; Martens, L.; Joseph, W. A performance comparison of different cost functions for RSS-based visible light positioning under the presence of reflections. In Proceedings of the 4th ACM Workshop on Visible Light Communication Systems at the 23rd Annual International Conference on Mobile Computing and Networking, Snowbird, UT, USA, 16 October 2017; ACM Press: New York, NY, USA, 2017; pp. 37–41. [Google Scholar]
- Plets, D.; Bastiaens, S.; Stevens, N.; Martens, L.; Joseph, W. Monte-Carlo Simulation of the Impact of LED Power Uncertainty on Visible Light Positioning Accuracy. In Proceedings of the 11th International Symposium on Communication Systems, Networks & Digital Signal Processing, CSNDSP 2018, Budapest, Hungary, 18–20 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Jeong, E.; Yang, S.; Kim, H.; Han, S. Tilted receiver angle error compensated indoor positioning system based on visible light communication. Electron. Lett. 2013, 49, 890–892. [Google Scholar] [CrossRef]
- Jeong, E.M.; Kim, D.R.; Yang, S.H.; Kim, H.S.; Son, Y.H.; Han, S.K. Estimated position error compensation in localization using visible light communication. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 470–471. [Google Scholar] [CrossRef]
- Yang, S.; Kim, H.; Son, Y.; Han, S. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS With Multiple Optical Receivers. J. Lightwave Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Wang, J.; Li, Q.; Zhu, J.; Wang, Y. Impact of receiver’s tilted angle on channel capacity in VLCs. Electron. Lett. 2017, 53, 421–423. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Lausnay, S.D.; Strycker, L.D.; Goemaere, J.P.; Stevens, N.; Nauwelaers, B. A Visible Light Positioning system using Frequency Division Multiple Access with square waves. In Proceedings of the 2015 9th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, QLD, Australia, 14–16 December 2015; pp. 1–7. [Google Scholar]
- Bastiaens, S.; Plets, D.; Martens, L.; Joseph, W. Impact of Nonideal LED Modulation on RSS-based VLP Performance. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, Z.; Kavehrad, M.; Deng, P. Indoor positioning algorithm using light-emitting diode visible light communications. Opt. Eng. 2012, 51, 1–7. [Google Scholar] [CrossRef]
- Sun, X.; Duan, J.; Zou, Y.; Shi, A. Impact of multipath effects on theoretical accuracy of TOA-based indoor VLC positioning system. Photon. Res. 2015, 3, 296–299. [Google Scholar] [CrossRef]
- Plets, D.; Bastiaens, S.; Stevens, N.; Martens, L.; Joseph, W. On the Impact of LED Power Uncertainty on the Accuracy of 2D and 3D Visible Light Positioning. Optik 2019. submitted. [Google Scholar]
- Hanssens, B.; Plets, D.; Tanghe, E.; Oestges, C.; Gaillot, D.P.; Lienard, M.; Li, T.; Steendam, H.; Martens, L.; Joseph, W. An Indoor Variance-Based Localization Technique Utilizing the UWB Estimation of Geometrical Propagation Parameters. IEEE Trans. Antennas Propag. 2018, 66, 2522–2533. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Kim, D.; Yang, S.; Son, Y.; Han, S. An Indoor Visible Light Communication Positioning System Using a RF Carrier Allocation Technique. J. Lightwave Technol. 2013, 31, 134–144. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Explanation | Parameter | Explanation |
|---|---|---|---|
| horizontal LED tilt | h | LED-PD height difference | |
| azimuthal rotation of tilted LED normal | d | LED-PD distance | |
| general notation for angle of irradiance (= or ) | vector from LED to PD | ||
| angle of irradiance for untilted LED | untilted LED normal | ||
| angle of irradiance for tilted LED | tilted LED normal | ||
| angle of incidence | PD normal |
| Positioning Error (cm) | LSE | nLSE | Trilateration | |||
|---|---|---|---|---|---|---|
| normal office (h = 2.5, = 1°) | 1.80 | 6.52 | 2.06 | 6.52 | 2.47 | 9.07 |
| sloppy office (h = 2.5, = 2°) | 3.64 | 13.09 | 4.03 | 13.15 | 4.90 | 18.35 |
| normal industrial (h = 6, = 1°) | 2.24 | 6.40 | 2.50 | 7.02 | 2.66 | 8.08 |
| sloppy industrial (h = 6, = 2°) | 4.53 | 12.65 | 4.92 | 13.87 | 5.25 | 15.87 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plets, D.; Bastiaens, S.; Martens, L.; Joseph, W. An Analysis of the Impact of LED Tilt on Visible Light Positioning Accuracy. Electronics 2019, 8, 389. https://doi.org/10.3390/electronics8040389
Plets D, Bastiaens S, Martens L, Joseph W. An Analysis of the Impact of LED Tilt on Visible Light Positioning Accuracy. Electronics. 2019; 8(4):389. https://doi.org/10.3390/electronics8040389
Chicago/Turabian StylePlets, David, Sander Bastiaens, Luc Martens, and Wout Joseph. 2019. "An Analysis of the Impact of LED Tilt on Visible Light Positioning Accuracy" Electronics 8, no. 4: 389. https://doi.org/10.3390/electronics8040389
APA StylePlets, D., Bastiaens, S., Martens, L., & Joseph, W. (2019). An Analysis of the Impact of LED Tilt on Visible Light Positioning Accuracy. Electronics, 8(4), 389. https://doi.org/10.3390/electronics8040389