Congestion Control in V2V Safety Communication: Problem, Analysis, Approaches



Abstract
:1. Introduction
2. Background
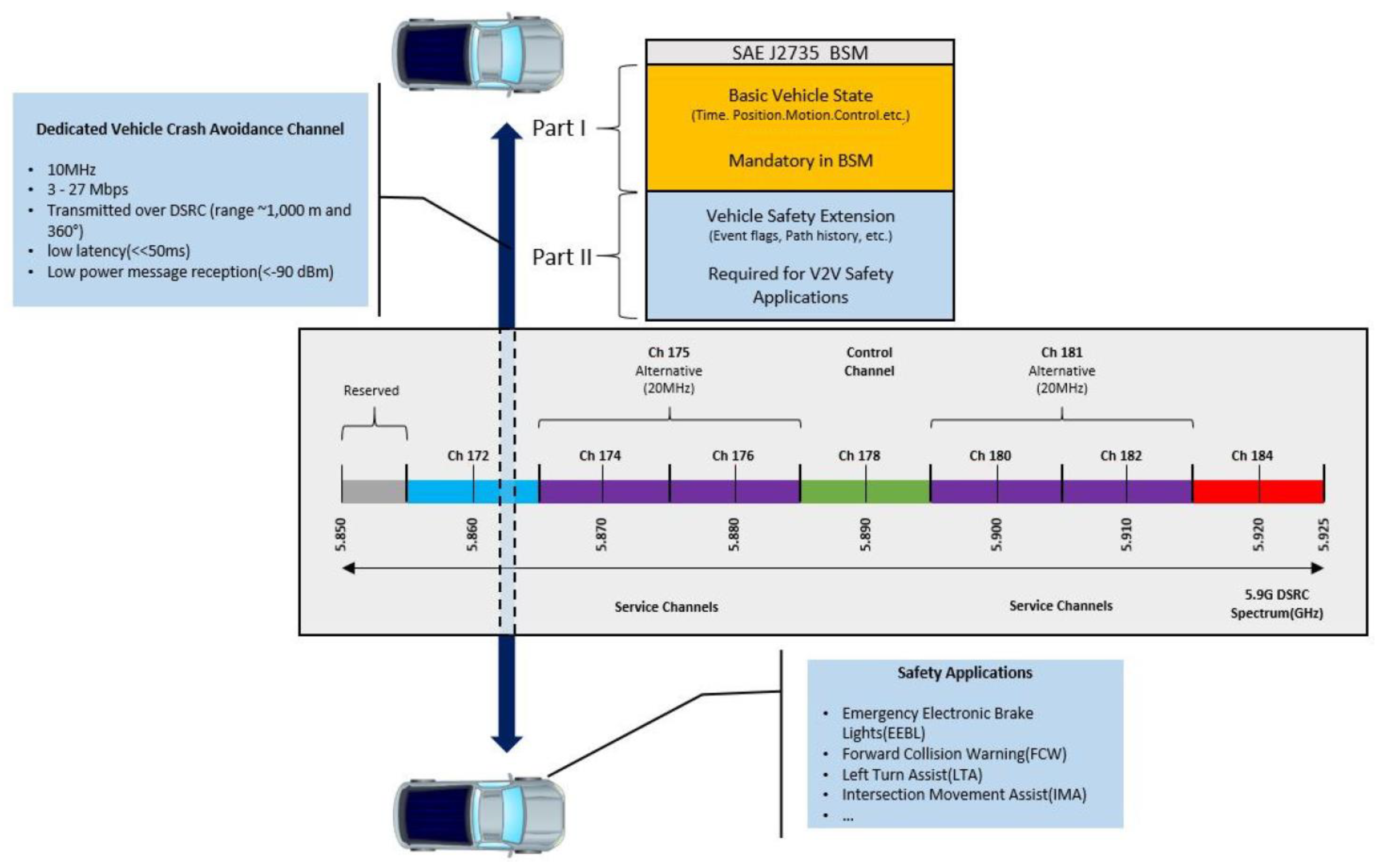
- Part I includes basic vehicle state which is mandatory in each BSM, e.g., time, position, motion, vehicle size.
- Part II includes vehicle safety extension, which is optional for V2V safety applications, e.g., event flags, path history.
2.1. DSRC Spectrum for V2V Communication
2.2. Channel Congestion in DSRC
- successful packet receptions decrease and transmission delay increases with increasing message generation rates;
- effective transmission ranges decrease under high channel load conditions;
- communication range of a transmitter decreases under interference (lower SINR) due to hidden stations or simultaneous sending.
- transmission collision due to simultaneous sending;
- lower SINR caused by the interference from single/multiple hidden stations;
- packet dropped locally due to the failure of medium access;
- lower SINR caused by the nearby transmitting stations.
3. Performance Metrics and Simulation Parameters
3.1. Performance Metrics
3.1.1. Channel Busy Ratio (CBR)
3.1.2. Packet Loss Rate (PLR)
3.1.3. Inter-Packet Delay (IPD)
- Scenario 1: Alternate beacons are received correctly. In this case IPD = 200 ms, meaning information for vehicle A is outdated for at most 200 ms;
- Scenario 2: Beacons are received in batches—25 beacons are received in the first two seconds of the interval, then no beacon is received for 5 s, and the remaining 25 beacons are received in the last three seconds of the interval. In this case, there is a situation awareness blackout of at least 5 s. Considering that a vehicle position can change by over 100 m in 5 s at highway speeds, it is clear that situation awareness is severely impaired in Scenario 2, resulting in possibly undetected dangerous situations.
3.1.4. Additional Metrics
3.2. Simulation Parameters
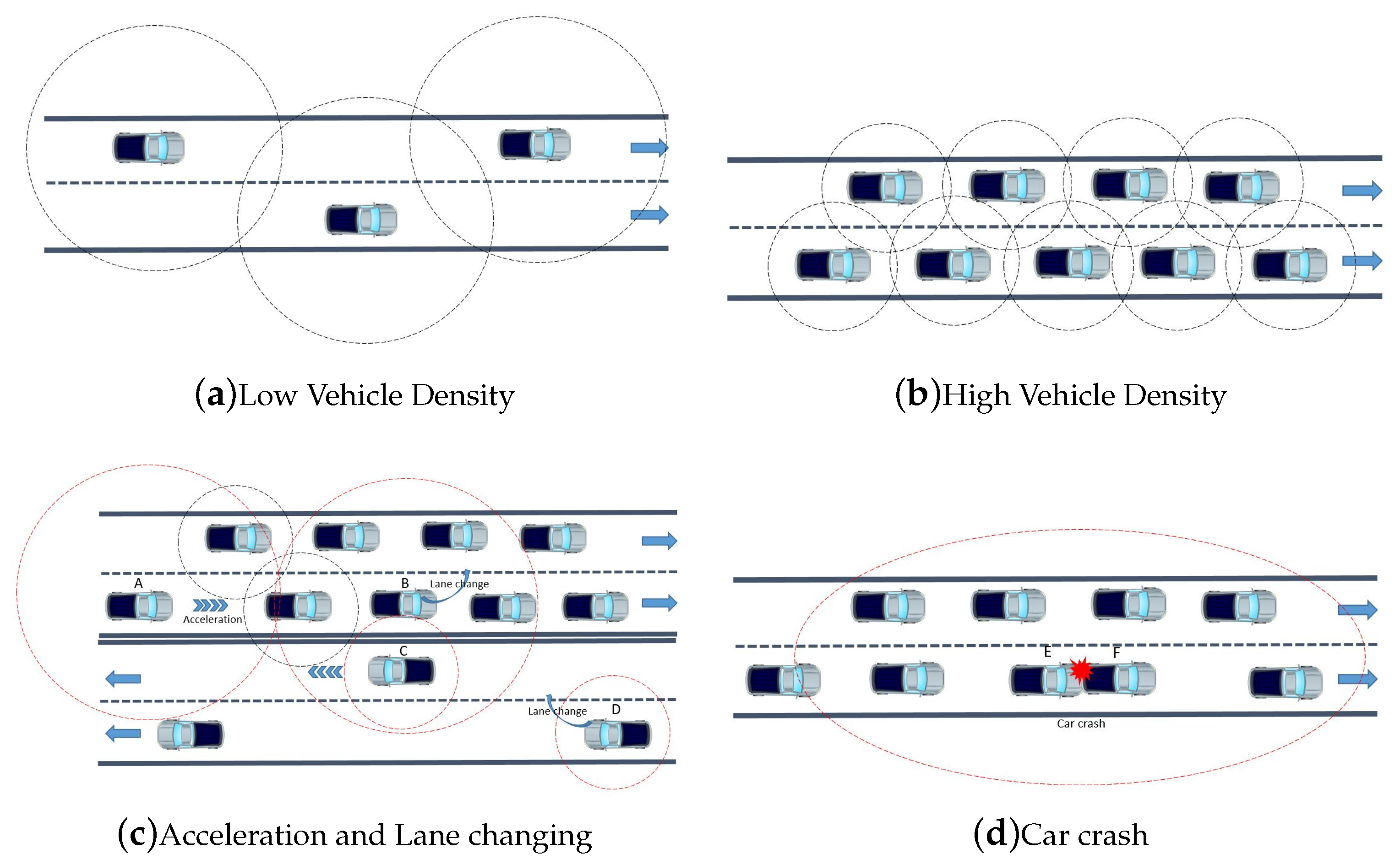
3.2.1. Traffic Scenarios
3.2.2. Channel Fading Model
3.2.3. Simulation Tools
- ns-2: Network Simulator-2 (ns-2) [46] is an open source, discrete event network simulator for both wired and wireless networks. In ns-2, arbitrary network topologies can be defined that are composed of routers, links and shared media [47]. The physical activities of the network are processed and queued in the form of events, in a scheduled order. These events are then processed as per the scheduled time, which increases along with the processing of events. However, the simulation is not real time, it is considered virtual [48]. ns-2 was extended by [49] with: (a) node mobility, (b) a realistic physical layer with a radio propagation model, (c) radio network interfaces, and (d) the IEEE 802.11 Medium Access Control (MAC) protocol using the distributed coordination function (DCF). After revised by [50], the resulting PHY is a full featured generic module capable of supporting any single channel frame based communications. The key features include cumulative signal to interference plus noise ratio (SINR) computation, preamble and physical layer convergence procedure (PLCP) header processing and capture, and frame body capture. The MAC now accurately models the basic IEEE 802.11 carrier sense multiple access with collision avoidance (CSMA/CA) mechanism, as required for credible simulation studies.
- ns-3: The ns-3 project [51] started from mid 2006 and is still under development. The latest release is ns-3.29. It is treated as a replacement instead of upgrading of ns-2. It supports parallel simulation and emulation using sockets. ns-3 provides a realistic environment and its source code is well organized compared to ns-2 [52]. In ns-3, vehicle mobility and network communication are integrated through events. User-created event handlers can send network messages or alter vehicle mobility each time a network message is received and each time vehicle mobility is updated by the model. The authors in [53] implemented a straight highway model in ns-3 that manages vehicle mobility, while allowing for various user customizations. The revised ns-3 has two main classes: Highway and Vehicle. Vehicles are fully-functional ns-3 nodes that contained additional information regarding their current acceleration, velocity, and position. The Highway class uses Model and LaneChange objects attached to Vehicles to move vehicles based on IDM (Intelligent Driver Model [54]) and MOBIL lane change model (Minimizing Overall Braking Induced by Lane Changes [55]). In addition, Highway used ns-3 callbacks to enable simulation developers to take control of Vehicles based on network messages, overriding, if need be, the standard controls used in Highways. More improvements for ns-3 can be found in [56].
- OMNet++: Unlike ns-2 and ns-3, OMNet++ supports more than network simulation. It can also be used for multiprocessors modelling, distributed hardware systems, etc. As a general discrete event, component-based open architecture simulation framework, OMNet++ can combine with SUMO (Simulation of Urban MObility) [57], a traffic simulator and Veins (Vehicles In Network Simulation) [58], which couples the network and traffic simulator to simulate the vehicle communication. With Veins each simulation is performed by executing two simulators in parallel: OMNeT++ (for network simulation) and SUMO (for road traffic simulation). Both simulators are connected via a TCP socket. The protocol for this communication has been standardized as the Traffic Control Interface (TraCI). This allows bidirectionally-coupled simulation of road traffic and network traffic. Movement of vehicles in the road traffic simulator SUMO is reflected as movement of nodes in an OMNeT++ simulation. Nodes can then interact with the running road traffic simulation.
4. Analysis and Approaches
4.1. Beacons (BSMs/CAMs) vs. Event-driven Safety Messages
4.2. Reactive vs. Proactive
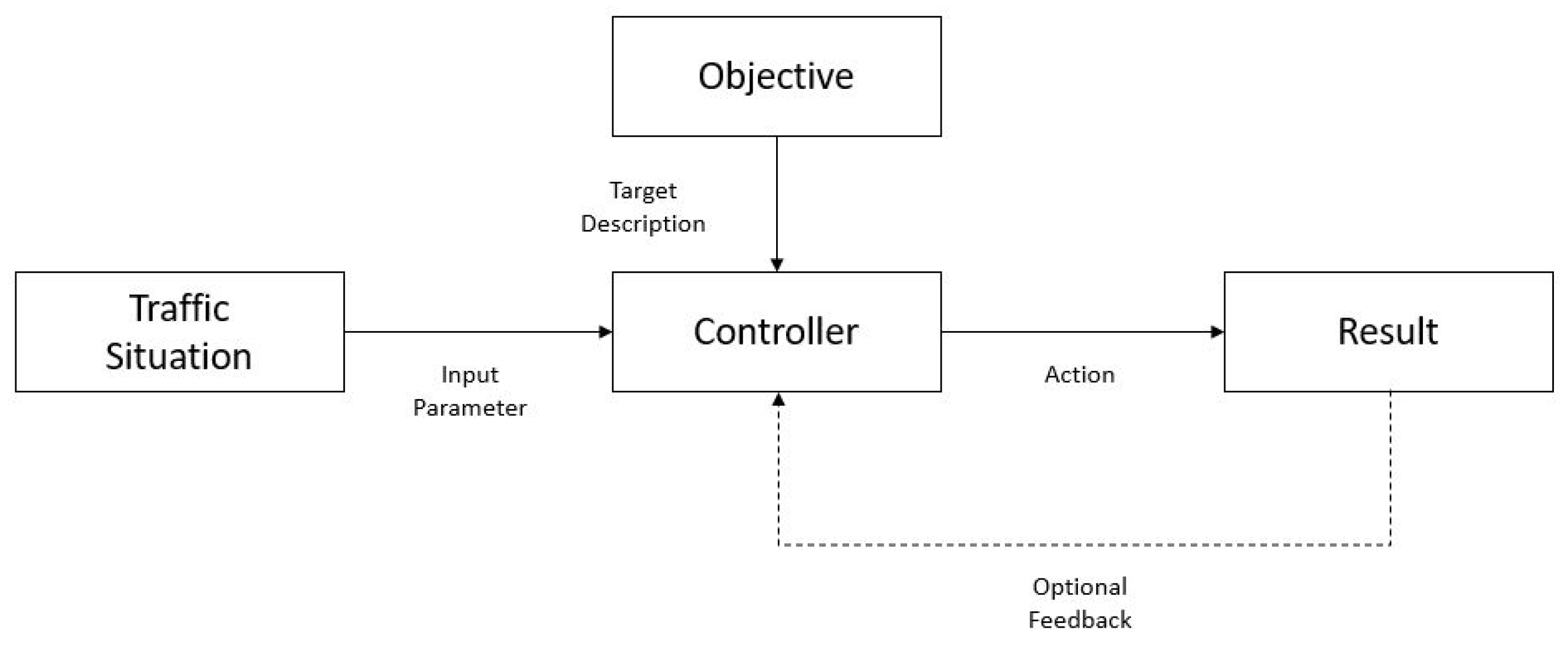
4.3. Selection of Control Parameters
4.3.1. Rate Control
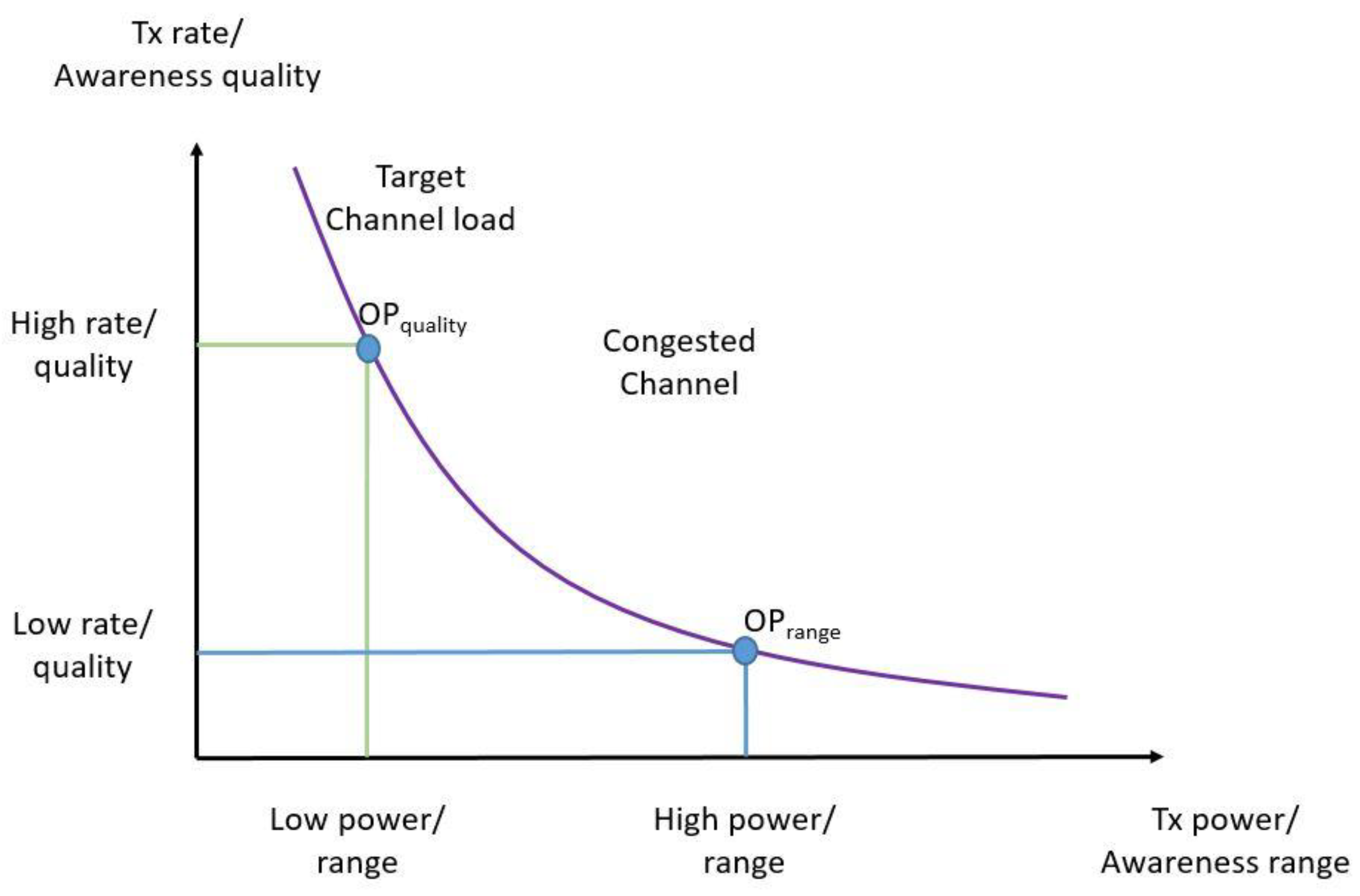
4.3.2. Power Control
4.3.3. Hybrid Control
4.4. Overview of Different Congestion Control Approaches
4.5. Comparison of Different Approaches
5. Additional Design Considerations for V2V Congestion Control
5.1. Fairness
5.2. Awareness Control
6. Conclusions
- Joint power/rate control: Existing hybrid approaches that combine Tx power and rate adaption typically implement congestion control in two different phases, e.g., fix a Tx power first and then adapt the Tx rate. A real time combined Tx power and rate control based on detailed safety benefit calculations can lead to improved performance and is a promising direction for research.
- Improved awareness control: As discussed in Section 5.2, awareness control focuses more on the relevant vehicles and local vehicles’ information. We need to be able to accurately identify “relevant” vehicles and acquire detailed local traffic information, e.g., awareness needs more specific information about the vehicle’s position, speed. So far only a few papers have considered the tracking error when implementing congestion control.
- Relative fairness: Each vehicle may have a very different driving context. So absolute fairness for both local or global fairness is not realistic. More specific relative fairness criteria are needed, when adapting the transmission parameters. It is an important problem to develop suitable metrics for evaluating fairness in different contexts and design approaches that maximize fairness.
- Standardization: In this paper, we reviewed many different metrics and approaches for V2V safety communication. It is not realistic to follow one unified process to deal with congestion problem, however at least the metrics used in the approaches should be normalized. For example, the widely used CBR metric has been referred to by a number of different names in different papers. There is a need for adoption of a common terminology and method of calculation for the performance metrics, to ensure consistent and fair evaluation of the various approaches.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Toh, C. Ad Hoc Mobile Wireless Networks: Protocols and Systems; Pearson Education: London, UK, 2001. [Google Scholar]
- Eze, E.C.; Zhang, S.J.; Liu, E.J.; Eze, J.C. Advances in vehicular ad-hoc networks (VANETs): Challenges and road-map for future development. Int. J. Autom. Comput. 2016, 13, 1–18. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Li, Y. An Overview of the DSRC/WAVE Technology; Springer: Berlin/Heidelberg, Germany, 2012; Volume 74. [Google Scholar] [CrossRef]
- Weinfeld, A. Methods to reduce DSRC channel congestion and improve V2V communication reliability. In Proceedings of the 17th ITS World Congress, Busan, Korea, 25–29 October 2010. [Google Scholar]
- Paganini, F.; Doyle, J.; Low, S. Scalable laws for stable network congestion control. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; Volume 1, pp. 185–190. [Google Scholar]
- Yi, Y.; Shakkottai, S. Hop-by-hop congestion control over a wireless multi-hop network. IEEE/ACM Trans. Netw. 2007, 15, 133–144. [Google Scholar] [CrossRef]
- Welzl, M. Network Congestion Control: Managing Internet Traffic; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Allman, M.; Paxson, V.; Blanton, E. TCP Congestion Control; No. RFC 5681; 2009. Available online: https://www.rfc-editor.org/rfc/rfc5681.txt (accessed on 10 May 2019).
- Bansal, G.; Kenney, J.B.; Rohrs, C.E. LIMERIC: A linear adaptive message rate algorithm for DSRC congestion control. IEEE Trans. Veh. Technol. 2013, 62, 4182–4197. [Google Scholar] [CrossRef]
- Flurscheim, H. Radio Warning Systems for use on Vehicles. US Patent 1,612,427, 13 November 1925. [Google Scholar]
- Hayward, J.C. Near Miss Determination through Use of a Scale of Danger. Pennsylvania Transportation and Traffic Safety Center, 1972. Available online: https://onlinepubs.trb.org/Onlinepubs/hrr/1972/384/384-004.pdf (accessed on 10 May 2019).
- Campolo, C.; Molinaro, A.; Scopigno, R. Vehicular Ad Hoc Networks-Standards, Solutions, and Research; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Tielert, T.; Jiang, D.; Chen, Q.; Delgrossi, L.; Hartenstein, H. Design methodology and evaluation of rate adaptation based congestion control for vehicle safety communications. In Proceedings of the 2011 IEEE Vehicular Networking Conference (VNC), Amsterdam, The Netherlands, 14–16 November 2011; pp. 116–123. [Google Scholar]
- SAE J2735: Dedicated Short Range Communications (DSRC) Message Set Dictionary; Society of Automotive Engineers, DSRC Committee: Warrendale, PA, USA, 2009.
- ETSI (2013) ETSI EN 302 637-2 (V1.3.0)—Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service; Vehicular Communications. 2013. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.03.02_60/en_30263702v010302p.pdf (accessed on 10 May 2019).
- ETSI (2013) ETSI EN 302 637-3 V1.2.0—Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specification of Decentralized Environmental Notification Basic Service; Vehicular Communications. 2013. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263703/01.02.00_20/en_30263703v010200a.pdf (accessed on 10 May 2019).
- Amendment of the Commission’s Rules Regarding Dedicated Short-Range Communication Services in the 5.850–5.925 GHz Band (5.9 GHz Band); Technical Report; U.S. Federal Communications Commission: Washington, DC, USA, 2006.
- Sepulcre, M.; Mittag, J.; Santi, P.; Hartenstein, H.; Gozalvez, J. Congestion and Awareness Control in Cooperative Vehicular Systems. Proc. IEEE 2011, 99, 1260–1279. [Google Scholar] [CrossRef]
- Jiang, D.; Chen, Q.; Delgrossi, L. Optimal data rate selection for vehicle safety communications. In Proceedings of the Fifth ACM international workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 30–38. [Google Scholar]
- Xu, Q.; Mak, T.; Ko, J.; Sengupta, R. Vehicle-to-vehicle safety messaging in DSRC. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, PA, USA, 1 October 2004; pp. 19–28. [Google Scholar]
- Bansal, G.; Lu, H.; Kenney, J.B.; Poellabauer, C. EMBARC: Error model based adaptive rate control for vehicle-to-vehicle communications. In Proceedings of the Tenth ACM International Workshop on Vehicular Inter-Networking, Systems, and Applications, Taipei, Taiwan, 25 June 2013; pp. 41–50. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); European Profile Standard on the Physical and Medium Access Layer of 5 GHz ITS. 2009. Available online: https://www.etsi.org/deliver/etsi_es/202600_202699/202663/01.01.00_50/es_202663v010100m.pdf (accessed on 20 December 2018).
- Torrent-Moreno, M.; Santi, P.; Hartenstein, H. Distributed fair transmit power adjustment for vehicular ad hoc networks. In Proceedings of the 2006 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA, 28 September 2006; Volume 2, pp. 479–488. [Google Scholar]
- Huang, C.L.; Fallah, Y.P.; Sengupta, R.; Krishnan, H. Intervehicle transmission rate control for cooperative active safety system. IEEE Trans. Intell. Transp. Syst. 2011, 12, 645–658. [Google Scholar] [CrossRef]
- Torrent-Moreno, M.; Mittag, J.; Santi, P.; Hartenstein, H. Vehicle-to-vehicle communication: Fair transmit power control for safety-critical information. IEEE Trans. Veh. Technol. 2009, 58, 3684–3703. [Google Scholar] [CrossRef]
- Sjöberg Bilstrup, K.; Uhlemann, E.; Ström, E.G. Scalability issues of the MAC methods STDMA and CSMA of IEEE 802.11 p when used in VANETs. In Proceedings of the 2010 IEEE International Conference on Communications Workshops, Cape Town, South Africa, 23–27 May 2010. [Google Scholar]
- Kloiber, B.; Strang, T.; Röckl, M.; de Ponte-Müller, F. Performance of CAM based safety applications using ITS-G5A MAC in high dense scenarios. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden, Germany, 5–9 June 2011; pp. 654–660. [Google Scholar]
- Kloiber, B.; Harri, J.; Strang, T.; Sand, S.; Garcia, C.R. Random transmit power control for DSRC and its application to cooperative safety. IEEE Trans. Dependable Secur. Comput. 2016, 13, 18–31. [Google Scholar] [CrossRef]
- Zhang, L.; Valaee, S. Congestion control for vehicular networks with safety-awareness. IEEE/ACM Trans. Netw. 2016, 24, 3290–3299. [Google Scholar] [CrossRef]
- Math, C.B.; Li, H.; de Groot, S.H.; Niemegeers, I. Fair decentralized data-rate congestion control for V2V communications. In Proceedings of the 2017 24th International Conference on. IEEE Telecommunications (ICT), Limassol, Cyprus, 3–5 May 2017; pp. 1–7. [Google Scholar]
- Fallah, Y.P.; Huang, C.L.; Sengupta, R.; Krishnan, H. Analysis of information dissemination in vehicular ad-hoc networks with application to cooperative vehicle safety systems. IEEE Trans. Veh. Technol. 2011, 60, 233–247. [Google Scholar] [CrossRef]
- Autolitano, A.; Reineri, M.; Scopigno, R.M.; Campolo, C.; Molinaro, A. Understanding the channel busy ratio metrics for decentralized congestion control in VANETs. In Proceedings of the 2014 International Conference on IEEE Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 717–722. [Google Scholar]
- Chen, Q.; Jiang, D.; Tielert, T.; Delgrossi, L. Mathematical modeling of channel load in vehicle safety communications. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Martin-Faus, I.V.; Urquiza-Aguiar, L.; Igartua, M.A.; Guérin-Lassous, I. Transient analysis of idle time in VANETs using Markov-reward models. IEEE Trans. Veh. Technol. 2018, 67, 2833–2847. [Google Scholar] [CrossRef]
- Javed, M.A.; Khan, J.Y. A Cooperative Safety Zone Approach to Enhance the Performance of VANET Applications. In Proceedings of the VTC Spring, Dresden, Germany, 2–5 June 2013; pp. 1–5. [Google Scholar]
- Vandenberghe, W.; Moerman, I.; Demeester, P.; Cappelle, H. Suitability of the wireless testbed w-iLab. t for VANET research. In Proceedings of the 2011 18th IEEE Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Ghent, Belgium, 22–23 November 2011; pp. 1–6. [Google Scholar]
- Killat, M.; Hartenstein, H. An empirical model for probability of packet reception in vehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2009, 2009, 4. [Google Scholar] [CrossRef]
- Chang, H.; Song, Y.E.; Kim, H.; Jung, H. Distributed transmission power control for communication congestion control and awareness enhancement in VANETs. PLoS ONE 2018, 13, e0203261. [Google Scholar] [CrossRef]
- Martelli, F.; Renda, M.E.; Resta, G.; Santi, P. A measurement-based study of beaconing performance in IEEE 802.11 p vehicular networks. In Proceedings of the 2012 IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 1503–1511. [Google Scholar]
- Manual, H.C. Highway Capacity Manual; Transportation Research Board: Washington, DC, USA, 2000; Volume 2. [Google Scholar]
- Cheng, L.; Henty, B.E.; Stancil, D.D.; Bai, F.; Mudalige, P. Mobile vehicle-to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz dedicated short range communication (DSRC) frequency band. IEEE J. Sel. Areas Commun. 2007, 25, 1501–1516. [Google Scholar] [CrossRef]
- Nakagami, M. The m-distribution—A general formula of intensity distribution of rapid fading. In Statistical Methods in Radio Wave Propagation; Elsevier: Amsterdam, The Netherlands, 1960; pp. 3–36. [Google Scholar]
- Torrent-Moreno, M.; Jiang, D.; Hartenstein, H. Broadcast reception rates and effects of priority access in 802.11-based vehicular ad-hoc networks. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, PA, USA, 1 October 2004; pp. 10–18. [Google Scholar]
- Issariyakul, T.; Hossain, E. Introduction to Network Simulator NS2, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Hanle, C.; Hofmann, M. Performance comparison of reliable multicast protocols using the network simulator ns-2. In Proceedings of the 23rd Annual Conference on Local Computer Networks, Boston, MA, USA, 11–14 October 1998; pp. 222–237. [Google Scholar]
- Yinfei, P. Design Routing Protocol Performance Comparision in NS2: AODV Comparing to DSR as Example; Department of Computer Science, SUNY Binghamton: Binghamton, NY, USA, 2010. [Google Scholar]
- Johnson, D.B.; Broch, J.; Hu, Y.C.; Jetcheva, J.; Maltz, D.A. The cmu monarch project’s wireless and mobility extensions to ns. In Proceedings of the 42nd Internet Engineering Task Force, Chicago, IL, USA, 23–28 August 1998; p. 58. [Google Scholar]
- Chen, Q.; Schmidt-Eisenlohr, F.; Jiang, D.; Torrent-Moreno, M.; Delgrossi, L.; Hartenstein, H. Overhaul of IEEE 802.11 modeling and simulation in ns-2. In Proceedings of the 10th ACM Symposium on Modeling, Analysis, and Simulation of Wireless and Mobile Systems, Crete Island, Greece, 22–26 October 2007; pp. 159–168. [Google Scholar]
- Henderson, T.R.; Roy, S.; Floyd, S.; Riley, G.F. ns-3 project goals. In Proceedings of the 2006 Workshop on ns-2: The IP Network Simulator, Pisa, Italy, 10 October 2006; p. 13. [Google Scholar]
- Saeed, T.; Gill, H.; Fei, Q.; Zhang, Z.; Loo, B.T. An Open-Source and Declarative Approach towards Teaching Large-Scale Networked Systems Programming; ACM SIGCOMM Education Workshop: Toronto, ON, Canada.
- Arbabi, H.; Weigle, M.C. Highway mobility and vehicular ad-hoc networks in ns-3. In Proceedings of the Winter Simulation Conference, Baltimore, MD, USA, 5–8 December 2010; pp. 2991–3003. [Google Scholar]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Modeling lane-changing decisions with MOBIL. In Traffic and Granular Flow’07; Springer: Berlin/Heidelberg, Germany, 2009; pp. 211–221. [Google Scholar]
- Dupont, B. Improvements in VANET Simulator in ns-3. Master’s Thesis, Department of Computer Science, Old Dominion University, Norfolk, VA, USA, 2011. [Google Scholar]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban MObility: An overview. In Proceedings of the SIMUL 2011 the Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–29 October 2011; pp. 63–68. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally coupled network and road traffic simulation for improved IVC analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef]
- Bilalb, S.M.; Othmana, M.; ur Rehman Khana, A. A performance comparison of network simulators for wireless networks. arXiv 2013, arXiv:1307.4129. [Google Scholar]
- Martinez, F.J.; Toh, C.K.; Cano, J.C.; Calafate, C.T.; Manzoni, P. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wirel. Commun. Mob. Comput. 2011, 11, 813–828. [Google Scholar] [CrossRef]
- Khan, A.R.; Bilal, S.M.; Othman, M. A performance comparison of open source network simulators for wireless networks. In Proceedings of the 2012 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 23–25 November 2012; pp. 34–38. [Google Scholar]
- Mittal, N.M.; Choudhary, S. Comparative study of simulators for vehicular ad-hoc networks (vanets). Int. J. Emerg. Technol. Adv. Eng. 2014, 4, 528–537. [Google Scholar]
- Pinart, C.; Sanz, P.; Lequerica, I.; García, D.; Barona, I.; Sánchez-Aparisi, D. DRIVE: A reconfigurable testbed for advanced vehicular services and communications. In Proceedings of the 4th International Conference on Testbeds and Research Infrastructures for the Development of Networks & Communities, Innsbruck, Austria, 18–20 March 2008; p. 16. [Google Scholar]
- Secinti, G.; Canberk, B.; Duong, T.Q.; Shu, L. Software defined architecture for VANET: A testbed implementation with wireless access management. IEEE Commun. Mag. 2017, 55, 135–141. [Google Scholar] [CrossRef]
- Paranthaman, V.V.; Ghosh, A.; Mapp, G.; Iniovosa, V.; Shah, P.; Nguyen, H.X.; Gemikonakli, O.; Rahman, S. Building a prototype vanet testbed to explore communication dynamics in highly mobile environments. In Proceedings of the International Conference on Testbeds and Research Infrastructures, Hangzhou, China, 14–15 June 2016; pp. 81–90. [Google Scholar]
- Ahmad, S.A.; Hajisami, A.; Krishnan, H.; Ahmed-Zaid, F.; Moradi-Pari, E. V2V System Congestion Control Validation and Performance. IEEE Trans. Veh. Technol. 2019. [Google Scholar] [CrossRef]
- SAE J2945/1_201603. On-Board System Requirements for V2V Safety Communications. Society of Automotive Engineers, 2016. Available online: https://www.its.dot.gov/research_archives/connected_vehicle/pdf/J2945_1_TSS_TP_Test_Specification-20160405.pdf (accessed on 10 May 2019).
- Heidemann, J.; Bulusu, N.; Elson, J.; Intanagonwiwat, C.; Lan, K.C.; Xu, Y.; Ye, W.; Estrin, D.; Govindan, R. Effects of detail in wireless network simulation. In Proceedings of the SCS Multiconference on Distributed Simulation, Phoenix, AZ, USA, 3–11 January 2001; pp. 3–11. [Google Scholar]
- Cavin, D.; Sasson, Y.; Schiper, A. On the accuracy of MANET simulators. In Proceedings of the Second ACM International Workshop on Principles of Mobile Computing, Toulouse, France, 30–31 October 2002; pp. 38–43. [Google Scholar]
- Kotz, D.; Newport, C.; Gray, R.S.; Liu, J.; Yuan, Y.; Elliott, C. Experimental evaluation of wireless simulation assumptions. In Proceedings of the 7th ACM International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Venice, Italy, 4–6 October 2004; pp. 78–82. [Google Scholar]
- Torrent-Moreno, M.; Santi, P.; Hartenstein, H. Fair sharing of bandwidth in VANETs. In Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks, Cologne, Germany, 2 September 2005; pp. 49–58. [Google Scholar]
- Yang, X.; Liu, L.; Vaidya, N.H.; Zhao, F. A vehicle-to-vehicle communication protocol for cooperative collision warning. In Proceedings of the First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services, Boston, MA, USA, 22–26 August 2004; pp. 114–123. [Google Scholar]
- Kabir, T.; Nurain, N.; Kabir, M.H. Pro-AODV (Proactive AODV): Simple modifications to AODV for proactively minimizing congestion in VANETs. In Proceedings of the 2015 International Conference on Networking Systems and Security (NSysS), Dhaka, Bangladesh, 5–7 January 2015; pp. 1–6. [Google Scholar]
- Ruehrup, S.; Fuxjaeger, P.; Smely, D. TCP-like congestion control for broadcast channel access in VANETs. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 427–432. [Google Scholar]
- Huang, C.L.; Fallah, Y.P.; Sengupta, R.; Krishnan, H. Adaptive intervehicle communication control for cooperative safety systems. IEEE Netw. 2010, 24, 6–13. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Ahmed, E.; Rodrigues, J.J.; Ali, I.; Noor, R.M. Shapely value perspective on adapting transmit power for periodic vehicular communications. IEEE Trans. Intell. Transp. Syst. 2018, 19, 977–986. [Google Scholar] [CrossRef]
- Gupta, P.; Kumar, P.R. The capacity of wireless networks. IEEE Trans. Inf. Theory 2000, 46, 388–404. [Google Scholar] [CrossRef]
- Crash Avoidance Metrics Partnership, Vehicle Safety Communications Consortium. Vehicle Safety Communications Project: Task 3 Final Report: Identify Intelligent Vehicle Safety Applications Enabled by DSRC; National Highway Traffic Safety Administration, US Department of Transportation: Washington, DC, USA, 2005.
- Weinfield, A.; Kenney, J.B.; Bansal, G. An Adaptive DSRC Message Transmission Rate Control Algorithm. In Proceedings of the 18th ITS World CongressTransCoreITS AmericaERTICO-ITS EuropeITS Asia-Pacific, Orlando, FL, USA, 16–20 October 2011. [Google Scholar]
- Mittag, J.; Schmidt-Eisenlohr, F.; Killat, M.; Härri, J.; Hartenstein, H. Analysis and design of effective and low-overhead transmission power control for VANETs. In Proceedings of the Fifth ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 39–48. [Google Scholar]
- Willis, J.T.; Jaekel, A.; Saini, I. Decentralized congestion control algorithm for vehicular networks using oscillating transmission power. In Proceedings of the 2017 Wireless Telecommunications Symposium (WTS), Chicago, IL, USA, 26–28 April 2017; pp. 1–5. [Google Scholar]
- Joseph, M.; Liu, X.; Jaekel, A. An Adaptive Power Level Control Algorithm for DSRC Congestion Control. In Proceedings of the 8th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications, Montreal, QC, Canada, 28 October–2 November 2018; pp. 57–62. [Google Scholar]
- Kloiber, B.; Härri, J.; Strang, T. Dice the tx power—Improving awareness quality in vanets by random transmit power selection. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 56–63. [Google Scholar]
- Goudarzi, F.; Asgari, H. Non-Cooperative Beacon Power Control for VANETs. IEEE Trans. Intell. Transp. Syst. 2018, 20, 777–782. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J.; Härri, J.; Hartenstein, H. Contextual Communications Congestion Control for Cooperative Vehicular Networks. IEEE Trans. Wirel. Commun. 2011, 10, 385–389. [Google Scholar] [CrossRef]
- Baldessari, R.; Scanferla, D.; Le, L.; Zhang, W.; Festag, A. Joining forces for vanets: A combined transmit power and rate control algorithm. In Proceedings of the 7th International Workshop on Intelligent Transportation (WIT), Hamburg, Germany, 22–23 March 2010; Available online: http://www.festag-net.de/doc/2010_WIT_powerratecontrol_vanets.pdf (accessed on 10 May 2019).
- Tielert, T.; Jiang, D.; Hartenstein, H.; Delgrossi, L. Joint power/rate congestion control optimizing packet reception in vehicle safety communications. In Proceedings of the Tenth ACM International Workshop on Vehicular Inter-Networking, Systems, and Applications, Taipei, Taiwan, 25 June 2013; pp. 51–60. [Google Scholar]
- Jacobson, V. Congestion avoidance and control. In Proceedings of the ACM SIGCOMM Computer Communication Review, Stanford, CA, USA, 16–18 August 1988; Volume 18, pp. 314–329. [Google Scholar]
- Math, C.B.; Li, H.; De Groot, S.H.; Niemegeers, I. A combined fair decentralized message-rate and data-rate congestion control for V2V communication. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; pp. 271–278. [Google Scholar]
- Huang, C.L.; Sengupta, R. Decentralized error-dependent transmission control for model-based estimation over a multi-access network. In Proceedings of the 4th Annual International Conference on Wireless Internet, WICON 2008, Maui, HI, USA, 17–19 November 2008; p. 80. [Google Scholar]
- Harsanyi, J.C.; Selten, R. A General Theory of Equilibrium Selection in Games; MIT Press Books: Cambridge, MA, USA, 1988; Volume 1. [Google Scholar]
- He, J.; Chen, H.H.; Chen, T.M.; Cheng, W. Adaptive congestion control for DSRC vehicle networks. IEEE Commun. Lett. 2010, 14, 127–129. [Google Scholar] [CrossRef]
- Lan, T.; Kao, D.; Chiang, M.; Sabharwal, A. An Axiomatic Theory of Fairness in Network Resource Allocation; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Sepulcre, M.; Gozalvez, J.; Altintas, O.; Kremo, H. Integration of congestion and awareness control in vehicular networks. Ad Hoc Netw. 2016, 37, 29–43. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J. Coordination of Congestion and Awareness Control in Vehicular Networks. Electronics 2018, 7, 335. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Rate/Power Control | Proactive/Reactive | Message Type | Metrics Used | Channel Fading Model | Simulator |
|---|---|---|---|---|---|---|
| LIMERIC [11] | Rate | Proactive | Beacon | CBR | Not mentioned | ns-2 |
| PULSAR [15] | Rate | Reactive | Beacon | CBR | Reyleigh, Nakagami | ns-2 |
| AIMD [74] | Rate | Proactive | Beacon | Reception rate, IPD, CBR | Not mentioned | own simulator |
| EMBARC [23] | Rate | Proactive | Beacon | Tracking error | Not mentioned | ns-2 |
| TRC for CASS [26] | Rate | Proactive | Beacon | 95% cutoff error | Rayleigh | OPNET |
| D-FPAV [25] | Power | Proactive | Beacon, Event messages | Probability of message reception | Nakagami | ns-2 |
| SPAV [80] | Power | Proactive | Beacon | Beaconing load | Nakagami, Two Ray Gound, | ns-2 |
| RTPC [83] | Power | Proactive | Beacon | Packet collision rate, CBR, Update delay | Not mentioned | ns-3 |
| OSC [81] | Power | Proactive | Beacon | Beacon error rate | Not mentioned | OMNet++, Veins |
| SBAPC [82] | Power | Proactive | Beacon | Beacon error rate, CBR, IPD | Not mentioned | OMNet++, Veins |
| NOPC [84] | Power | Proactive | Beacon | CBR | Nakagami | OMNet++, SUMO |
| AC3 [76] | Power | Reactive | Beacon | CBR | Not mentioned | OMNet++, Veins |
| Adaptive transmission control [75] | Hybrid | Reactive | Beacon | 95% cutoff error | Rayleigh | OPNET |
| TPRC [87] | Hybrid | Proactive | Beacon | IRT, CBR | Power-law | ns-2 |
| RTPC+TRC [30] | Hybrid | Proactive | Beacon | Packet collision rate, CBR, Update delay | Not mentioned | ns-3 |
| CPRC [86] | Hybrid | Proactive | Beacon | Channel Busy Time | Not mentioned | ns-2.31 |
| MD-DCC [89] | Hybrid | Proactive | Beacon | Channel Busy Time | Not mentioned | ns-3, SUMO |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Jaekel, A. Congestion Control in V2V Safety Communication: Problem, Analysis, Approaches. Electronics 2019, 8, 540. https://doi.org/10.3390/electronics8050540
Liu X, Jaekel A. Congestion Control in V2V Safety Communication: Problem, Analysis, Approaches. Electronics. 2019; 8(5):540. https://doi.org/10.3390/electronics8050540
Chicago/Turabian StyleLiu, Xiaofeng, and Arunita Jaekel. 2019. "Congestion Control in V2V Safety Communication: Problem, Analysis, Approaches" Electronics 8, no. 5: 540. https://doi.org/10.3390/electronics8050540
APA StyleLiu, X., & Jaekel, A. (2019). Congestion Control in V2V Safety Communication: Problem, Analysis, Approaches. Electronics, 8(5), 540. https://doi.org/10.3390/electronics8050540