A Low-Complex Frame Rate Up-Conversion with Edge-Preserved Filtering


Abstract
:1. Introduction
1.1. Motivation and Objective
1.2. Related Works
1.3. Main Contribution
- EPF-based Subsampling. EPF is first used to filter out the textures and preserve edges. The loss of textures can assist BME to avoid the bad effects resulting from similar structures, and the protection of edges suppresses the number of mismatched blocks in BME.
- BME with predictive search. We abandon FS to speed up BME, and construct a candidate MV set by selecting several spatial-temporal neighbors according to the local smoothness of MVF. Combined with the subsampled frame by EPF, the predictive search reduces the computation of BME while also guaranteeing a good predictive accuracy.
2. Background
2.1. Bidirectional Motion Estimation (BME)
2.2. Edge-Preserved Filtering (EPF)
3. Proposed FRUC Algorithm
3.1. Framework Overview
3.2. EPF-Based Subsampling
3.3. BME with Predictive Search
4. Experimental Results
4.1. Effects of Subsampling
4.2. Objective Evaluation
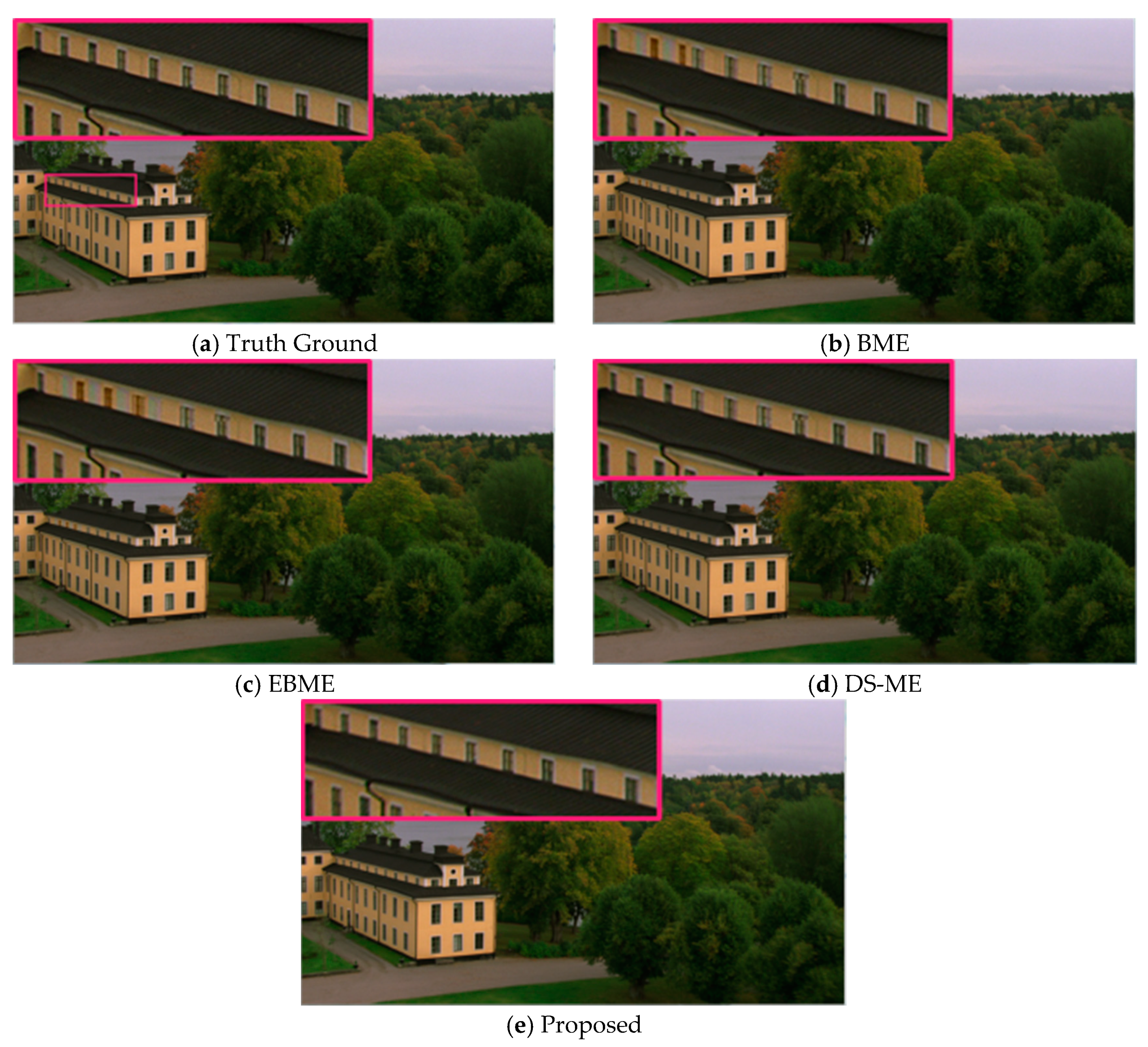
4.3. Subjective Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bao, W.; Zhang, X.; Chen, L.; Ding, L.; Gao, Z. High-Order Model and Dynamic Filtering for Frame Rate Up-Conversion. IEEE Trans. Image Process. 2018, 27, 3813–3826. [Google Scholar] [CrossRef]
- Dar, Y.; Bruckstein, A.M. Motion-compensated coding and frame rate up-conversion: Models and analysis. IEEE Trans. Image Process. 2015, 24, 2051–2206. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.L.; Chen, F.C.; Chien, S.Y. Algorithm and architecture design of multi-rate frame rate up-conversion for ultra-HDLCD systems. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 2739–2752. [Google Scholar] [CrossRef]
- Van, X.H. Statistical search range adaptation solution for effective frame rate up-conversion. IET Image Process. 2018, 12, 113–120. [Google Scholar]
- Choi, D.; Song, W.; Choi, H.; Kim, T. MAP-Based Motion Refinement Algorithm for Block-Based Motion-Compensated Frame Interpolation. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 1789–1804. [Google Scholar] [CrossRef]
- Van Thang, N.; Choi, J.; Hong, J.H.; Kim, J.S.; Lee, H.J. Hierarchical Motion Estimation for Small Objects in Frame-Rate Up-Conversion. IEEE Access 2018, 6, 60353–60360. [Google Scholar] [CrossRef]
- Gao, X.Q.; Duanmu, C.J.; Zou, C.R. A multilevel successive elimination algorithm for block matching motion estimation. IEEE Trans. Image Process. 2000, 9, 501–504. [Google Scholar] [CrossRef]
- De Haan, G.; Biezen, P.W.A.C.; Huijgen, H.; Ojo, O.A. True-motion estimation with 3-D recursive search block matching. IEEE Trans. Circuits Syst. Video Technol. 1993, 3, 368–379. [Google Scholar] [CrossRef] [Green Version]
- Dikbas, S.; Altunbasak, Y. Novel true-motion estimation algorithm and its application to motion-compensated temporal frame interpolation. IEEE Trans. Image Process. 2012, 22, 2931–2945. [Google Scholar] [CrossRef]
- Cetin, M.; Hamzaoglu, I. An adaptive true motion estimation algorithm for frame rate conversion of high definition video and its hardware implementations. IEEE Trans. Consum. Electron. 2011, 57, 923–931. [Google Scholar] [CrossRef]
- Tai, S.C.; Chen, Y.R.; Huang, Z.B.; Wang, C.C. A multi-pass true motion estimation scheme with motion vector propagation for frame rate up-conversion applications. J. Disp. Technol. 2008, 4, 188–197. [Google Scholar]
- Tsai, T.H.; Lin, H.Y. High visual quality particle based frame rate up conversion with acceleration assisted motion trajectory calibration. J. Disp. Technol. 2012, 8, 341–351. [Google Scholar] [CrossRef]
- Choi, B.T.; Lee, S.H.; Ko, S.J. New frame rate up-conversion using bi-directional motion estimation. IEEE Trans. Consum. Electron. 2000, 46, 603–609. [Google Scholar] [CrossRef]
- Kang, S.J.; Cho, K.R.; Kim, Y.H. Motion compensated frame rate up-conversion using extended bilateral motion estimation. IEEE Trans. Consum. Electron. 2007, 53, 1759–1767. [Google Scholar] [CrossRef]
- Yoo, D.G.; Kang, S.J.; Kim, Y.H. Direction-select motion estimation for motion-compensated frame rate up-conversion. J. Disp. Technol. 2013, 9, 840–850. [Google Scholar]
- Ferroukhi, M.; Ouahabi, A.; Attari, M.; Habchi, Y.; Taleb-Ahmed, A. Medical video coding based on 2nd-generation wavelets: Performance evaluation. Electronics 2019, 8, 88. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; He, T.; Jin, X.; Wu, F. Learning for video compression. IEEE Trans. Circuits Syst. Video Technol. 2019. [Google Scholar] [CrossRef] [Green Version]
- Ouahabi, A. SIGNAL and Image Multiresolution Analysis; ISTE-Wiley: London, UK, 2012. [Google Scholar]
- Kappeler, A.; Yoo, S.; Dai, Q.; Katsaggelos, A.K. Video super-resolution with convolutional neural networks. IEEE Trans. Comput. Imaging 2016, 2, 109–122. [Google Scholar] [CrossRef]
- Sidahmed, S.; Messali, Z.; Ouahabi, A.; Trépout, S.; Messaoudi, C.; Marco, S. Nonparametric denoising methods based on contourlet transform with sharp frequency localization: Application to electron microscopy images with low exposure time. Entropy 2015, 17, 2781–2799. [Google Scholar]
- Ouahabi, A. A review of wavelet denoising in medical imaging. In Proceedings of the 8th IEEE International Workshop on Systems, Signal Processing and Their Applications (WoSSPA), Algiers, Algeria, 12–15 May 2013; pp. 19–26. [Google Scholar]
- Sivanantham, S. High-throughput deblocking filter architecture using quad parallel edge filter for H. 264 video coding systems. IEEE Access 2019, 7, 99642–99650. [Google Scholar]
- Bao, W.; Lai, W.S.; Zhang, X.; Gao, Z.; Yang, M.H. MEMC-Net: Motion estimation and motion compensation friven neural network for video interpolation and enhancement. IEEE Trans. Pattern Anal. Mach. Intell. 2019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rüfenacht, D.; Taubman, D. HEVC-EPIC: Fast optical flow estimation from coded video via edge-preserving interpolation. IEEE Trans. Image Process. 2018, 27, 3100–3113. [Google Scholar] [CrossRef] [PubMed]
- Durand, F.; Dorsey, J. Fast bilateral filtering for the display of high-dynamic-range images. ACM Trans. Graph. 2002, 21, 257–266. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.J.; Kim, H.H.; Kim, M. Hierarchical Extended Bilateral Motion Estimation-Based Frame Rate Upconversion Using Learning-Based Linear Mapping. IEEE Trans. Image Process. 2018, 27, 5918–5932. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Yang, G.; Song, J.; Ding, X.; Li, R. Hierarchical prediction-based motion vector refinement for video frame-rate up-conversion. J. Real-Time Image Process. 2018, 1–15. [Google Scholar] [CrossRef]
- Nam, K.M.; Kim, J.S.; Park, R.H.; Shim, Y.S. A fast hierarchical motion vector estimation algorithm using mean pyramid. IEEE Trans. Circuits Syst. Video Technol. 1995, 5, 344–351. [Google Scholar]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Gastal, E.S.L.; Oliveira, M.M. Domain transform for edge-aware image and video processing. ACM Trans. Graph. (ToG) 2011, 30, 69. [Google Scholar] [CrossRef]
- Orchard, M.T.; Sullivan, G.J. Overlapped block motion compensation: An estimation-theoretic approach. IEEE Trans. Image Process. 1994, 3, 693–699. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsampling Factor | Non-Subsampling | Average Filtering | Gaussian Filtering | EPF |
|---|---|---|---|---|
| PSNR (dB) | Δ (dB) 1 | |||
| 2 | 33.14 | −1.91 | −1.93 | −1.79 |
| 4 | −3.20 | −3.24 | −3.02 | |
| 8 | −4.67 | −4.72 | −4.03 | |
| Test Sequence | BME [13] | EBME [14] | DS-ME [15] | Proposed | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | Time | PSNR | SSIM | Time | PSNR | SSIM | Time | PSNR | SSIM | Time | ||
| CIF | foreman | 33.41 | 0.9319 | 1.06 | 34.01 | 0.9435 | 1.71 | 34.36 | 0.9428 | 2.12 | 32.58 | 0.9170 | 0.19 |
| football | 21.09 | 0.5272 | 1.06 | 22.19 | 0.6255 | 1.80 | 21.86 | 0.5860 | 2.13 | 21.77 | 0.5586 | 0.21 | |
| 720P | ducks_take_off | 31.75 | 0.9775 | 9.62 | 31.77 | 0.9771 | 32.31 | 31.73 | 0.9772 | 24.04 | 31.97 | 0.9788 | 0.79 |
| in_to_tree | 36.28 | 0.9843 | 9.56 | 36.38 | 0.9843 | 37.64 | 36.58 | 0.9847 | 22.70 | 34.54 | 0.9814 | 0.77 | |
| old_town_cross | 35.47 | 0.9872 | 9.57 | 35.35 | 0.9858 | 37.62 | 35.95 | 0.9885 | 23.48 | 34.30 | 0.9866 | 0.77 | |
| 1080P | station2 | 38.89 | 0.9941 | 28.67 | 38.71 | 0.9965 | 222.34 | 38.98 | 0.9960 | 137.65 | 34.79 | 0.9573 | 1.66 |
| speed_bag | 33.23 | 0.9543 | 28.44 | 33.85 | 0.9573 | 222.37 | 33.71 | 0.9566 | 108.31 | 32.65 | 0.9534 | 1.62 | |
| pedestrian_area | 28.22 | 0.8723 | 23.48 | 28.95 | 0.9013 | 165.65 | 29.11 | 0.8971 | 110.65 | 28.18 | 0.8714 | 1.59 | |
| Avg. | 32.29 | 0.9036 | 13.93 | 32.65 | 0.9214 | 90.18 | 32.78 | 0.9161 | 53.88 | 31.35 | 0.9005 | 0.95 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.; Ma, W.; Li, Y.; You, L. A Low-Complex Frame Rate Up-Conversion with Edge-Preserved Filtering. Electronics 2020, 9, 156. https://doi.org/10.3390/electronics9010156
Li R, Ma W, Li Y, You L. A Low-Complex Frame Rate Up-Conversion with Edge-Preserved Filtering. Electronics. 2020; 9(1):156. https://doi.org/10.3390/electronics9010156
Chicago/Turabian StyleLi, Ran, Wendan Ma, Yanling Li, and Lei You. 2020. "A Low-Complex Frame Rate Up-Conversion with Edge-Preserved Filtering" Electronics 9, no. 1: 156. https://doi.org/10.3390/electronics9010156
APA StyleLi, R., Ma, W., Li, Y., & You, L. (2020). A Low-Complex Frame Rate Up-Conversion with Edge-Preserved Filtering. Electronics, 9(1), 156. https://doi.org/10.3390/electronics9010156