Research of Security Routing Protocol for UAV Communication Network Based on AODV

Abstract
:1. Introduction
2. Security AODV Routing Protocol
2.1. Authentication of Variable Parts
| Algorithms 1The Process of RREQ or RREP Routing Messages |
| 1: for each RREQ or RREP do |
| 2: Generate a random number (seed) |
| 3: Set the field, and fill the value of the Time field in the IP header |
| 4: Set the field, and fill the value of seed |
| 5: Set the field, which indicates the type of hash function used |
| 6: Set the field: |
| 7: Verify the hop count information: |
| 8: if the result is equal to the value in the field then |
| 9: the hop number field is correct |
| 10: else |
| 11: the hop number field is wrong |
| 12: end if |
| 13: Calculate the Hash value to record the new hop: |
| 14: end for |
2.2. Authentication of Invariant Parts
2.3. Intermediate Node Responds to the RREQ Message
2.4. The Process of Route Discovery
2.4.1. Generate RREQ Message
2.4.2. Processing RREQ Message
2.4.3. Generate RREP Message
2.4.4. Processing RREP Message
2.5. Protection of Route Error (RERR) Message
3. Improved Security AODV Routing Protocol
3.1. Elliptic Curve Cryptosystem
3.1.1. Addition Rule of Elliptic Curve
3.1.2. Scalar Multiplication of Elliptic Curves
3.1.3. Elliptic Curve Discrete Logarithm Problem
3.2. Secure Routing Scheme Based on ECC
3.2.1. Digital Signature Scheme Based on Elliptic Curve
| Algorithms 2The Process of UserRegistering with System CA |
| 1: for each do |
| 2: Select a user identity information, expressed as |
| 3: Randomly select an integer as the random key |
| 4: Calculate |
| 5: Submit to system CA |
| 6: Randomly select an integer variable |
| 7: Calculate the public key and public key evidence : |
| 8: Return to user |
| 9: generates its own private key: |
| 10: Verify the authenticity of user public key: |
| 11: end for |
| Algorithms 3The Process of Signature and Verification |
| 1: for each do |
| 2: A randomly selects an integer variable , |
| 3: Calculate , , |
| 4: A transmits signature (r, s) and M to B |
| 5: B calculates : |
| 6: if then |
| 7: the signature is valid |
| 8: else |
| 9: the signature is invalid |
| 10: end if |
| 11: end for |
3.2.2. The Process of Routing Discovery
3.2.3. The Process of Routing Maintenance
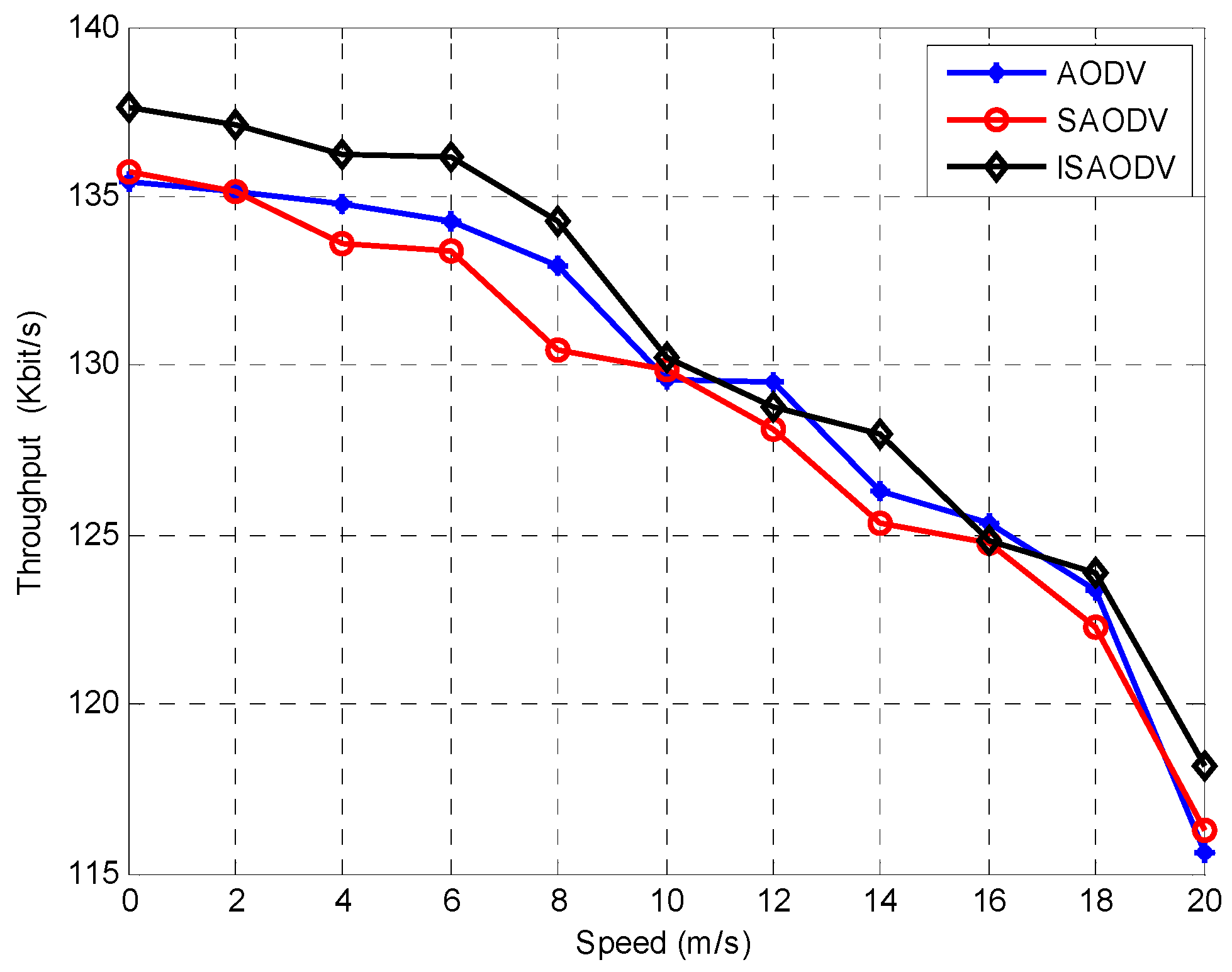
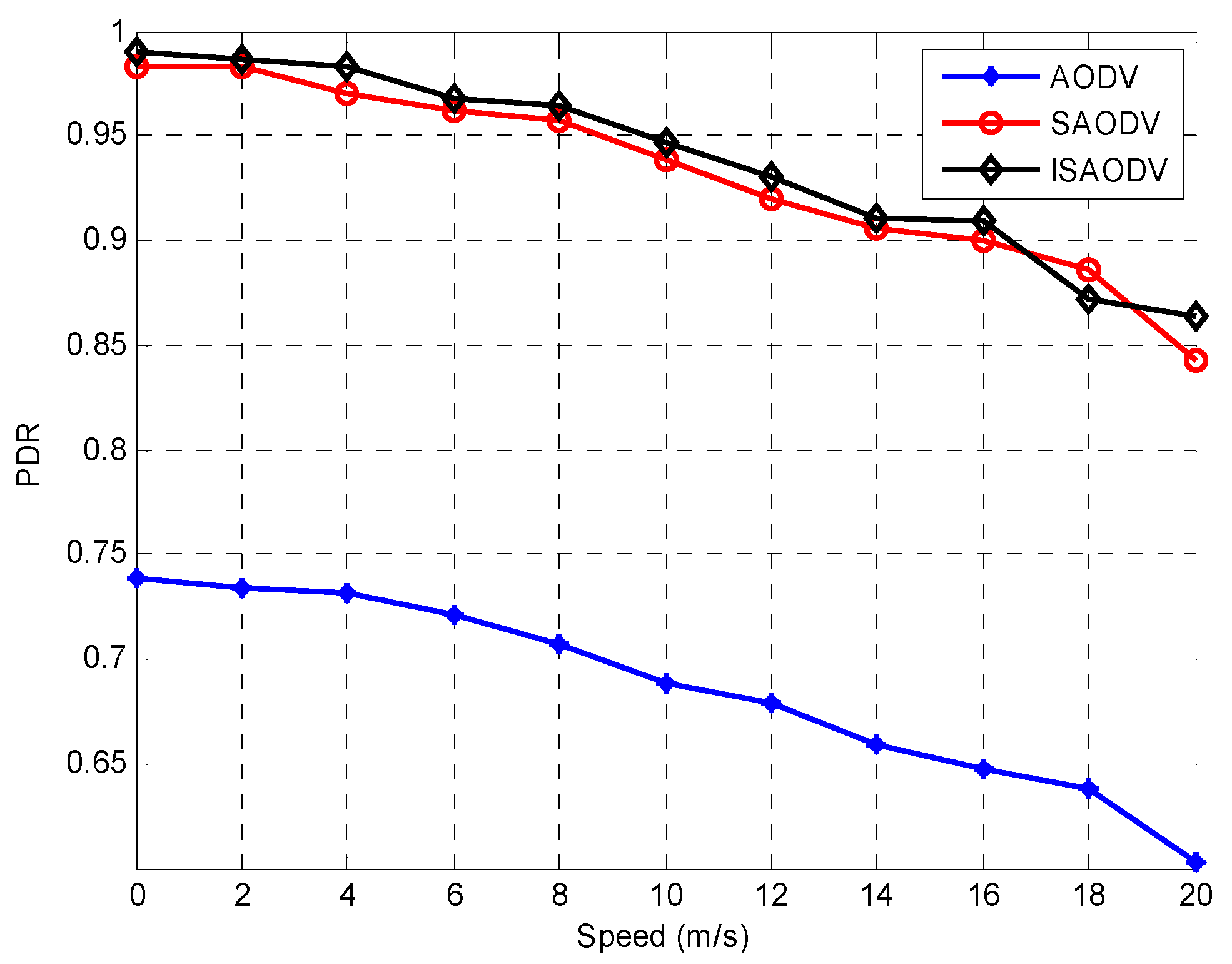
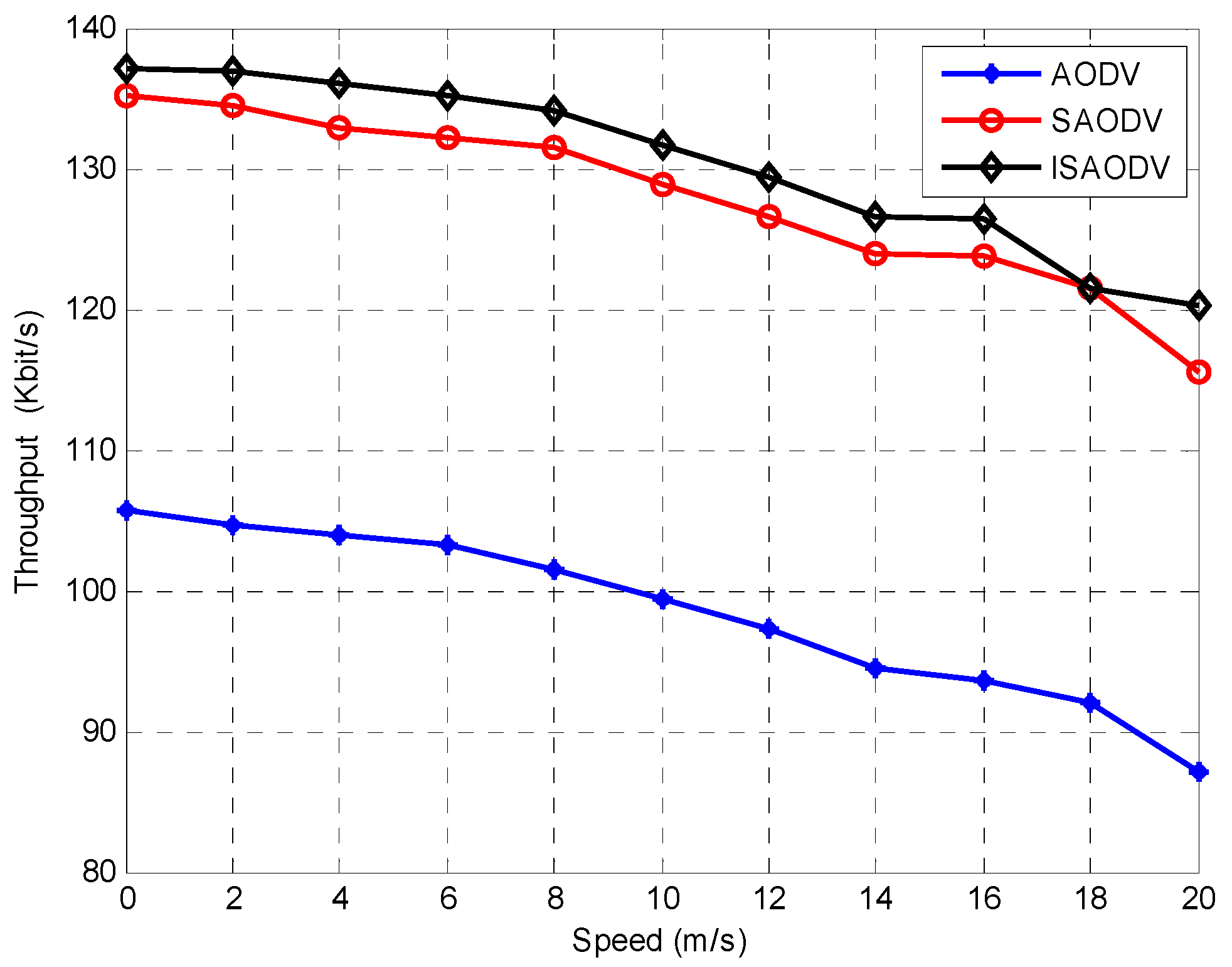
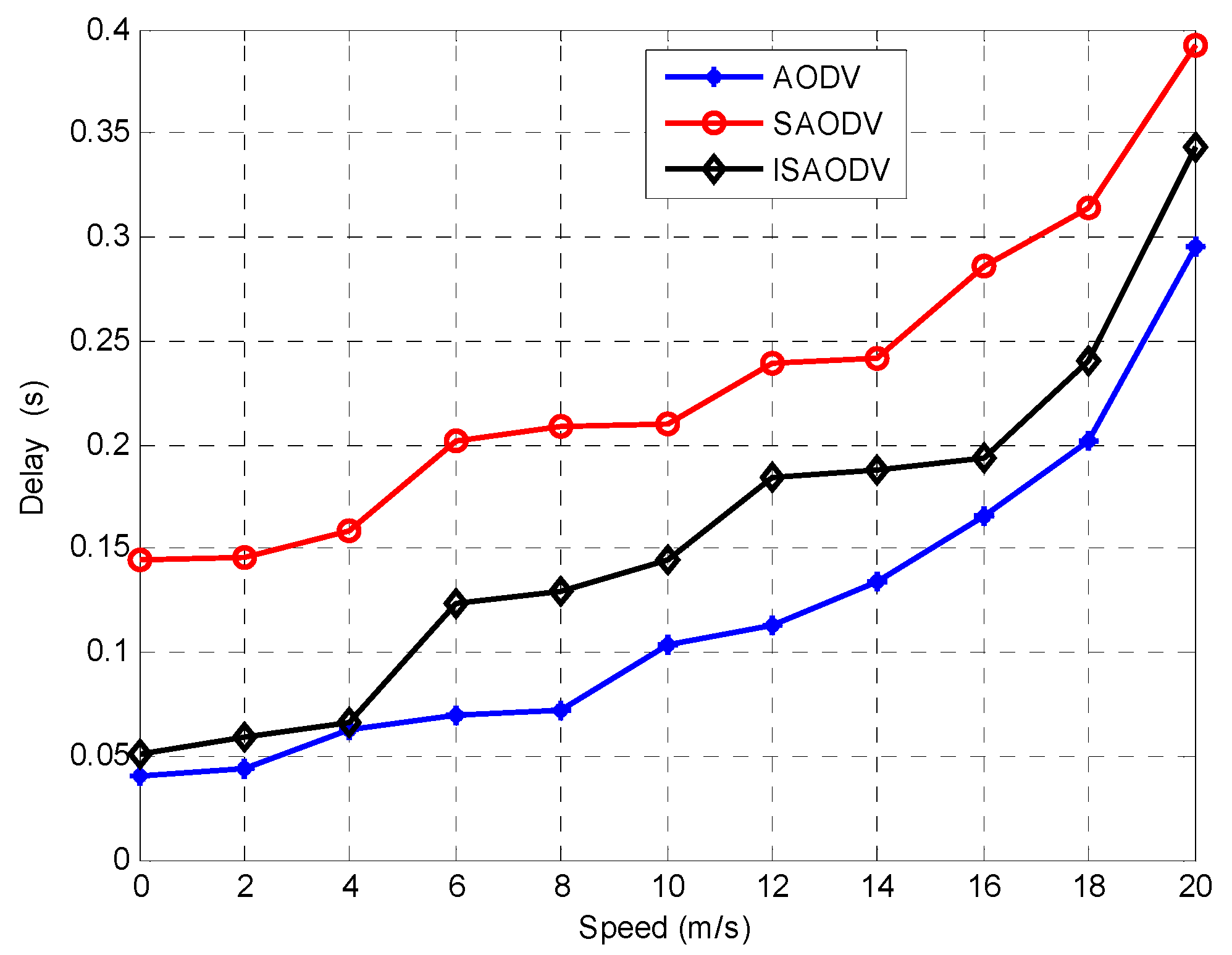
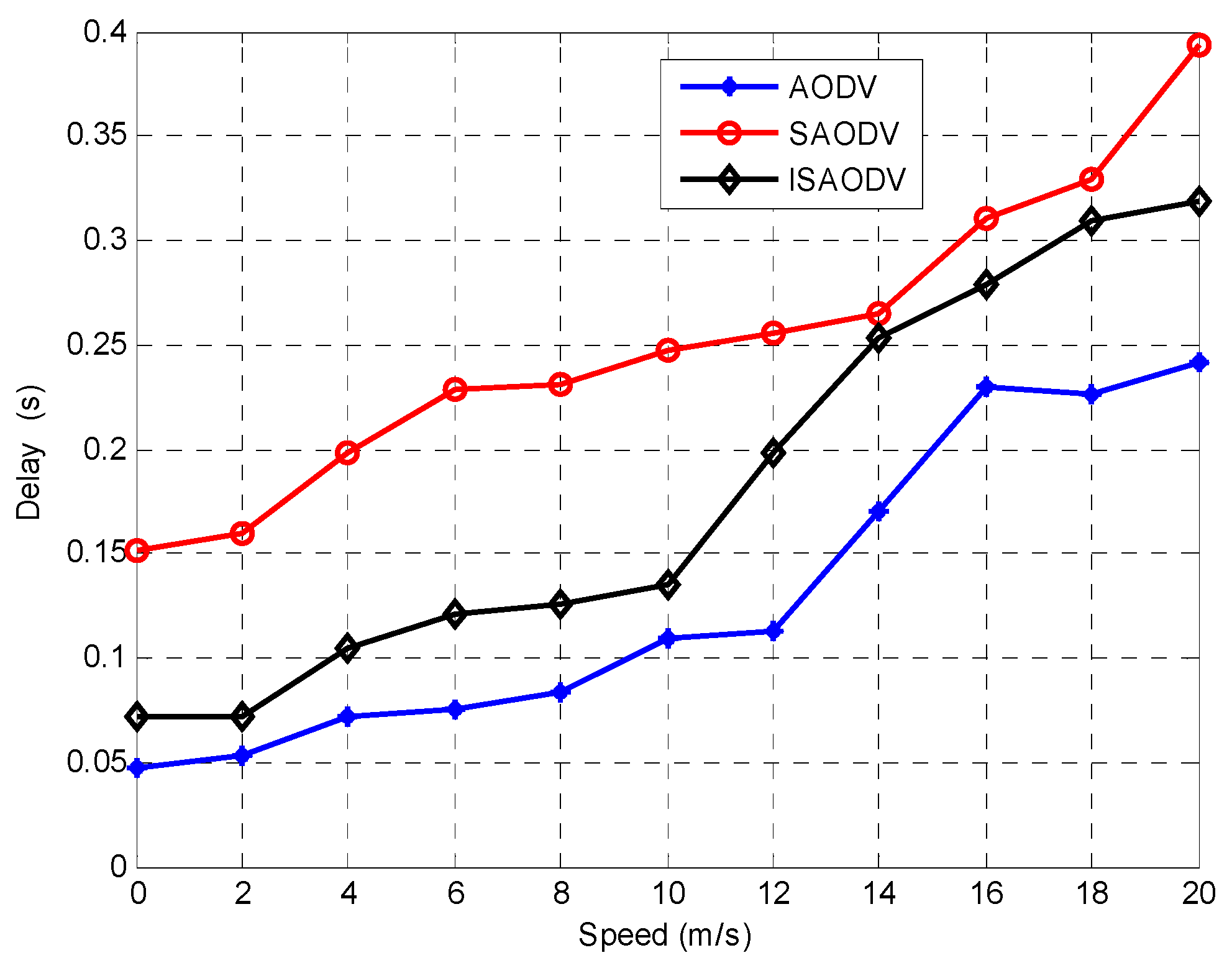
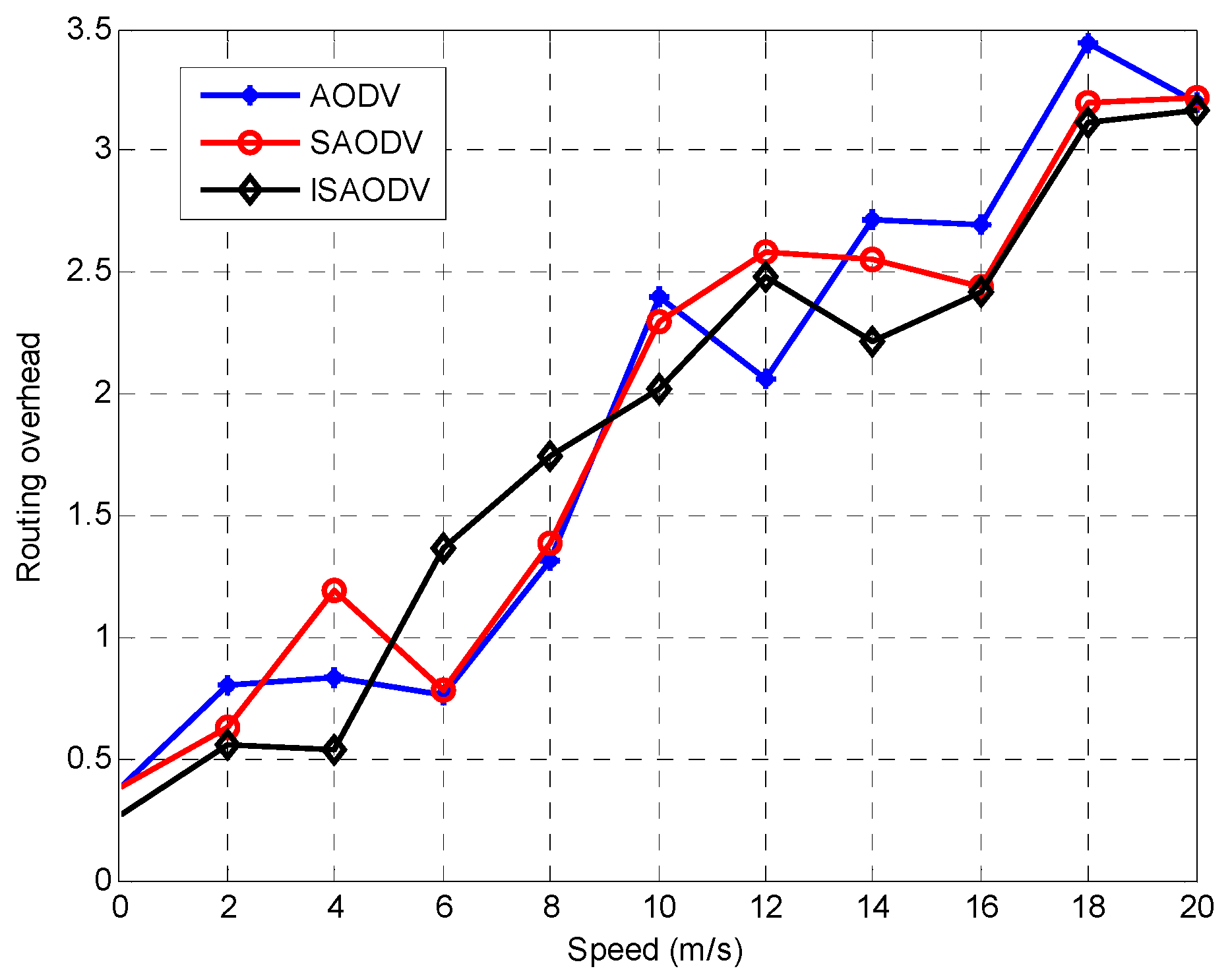
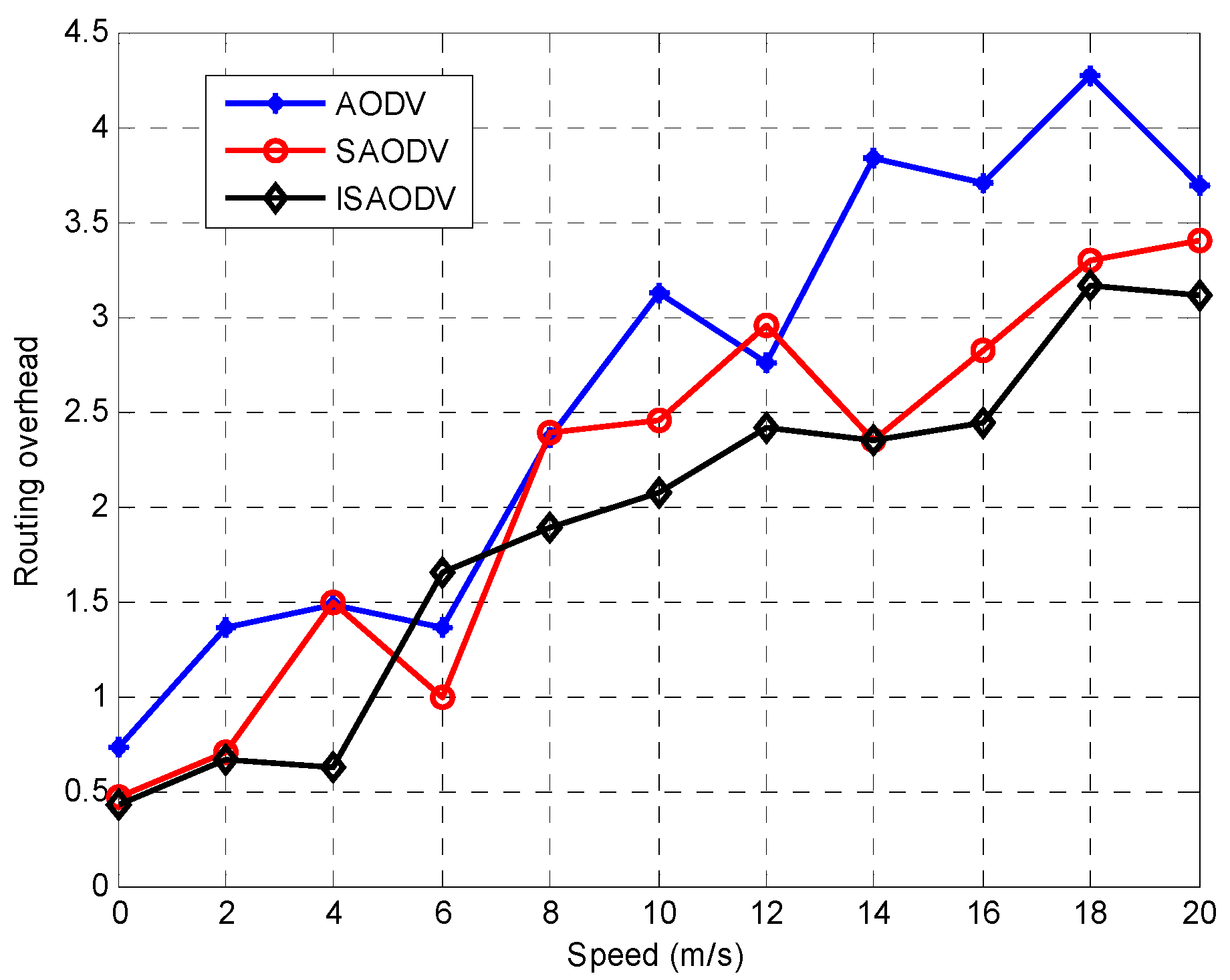
4. Simulation and Numerical Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Song, Y.; Wang, J.; Shang, J. Estimating effective leaf area index of winter wheat using simulated observation on unmanned aerial vehicle-based point cloud data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 2874–2887. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Han, D.Y. Detection of road surface changes from multi-temporal unmanned aerial vehicle images using a convolutional siamese network. Sustainability 2020, 12, 2482. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Yang, J.; Liu, Y.; Ou, C.; Li, B. Multi-temporal unmanned aerial vehicle remote sensing for vegetable mapping using an attention-based recurrent convolutional neural network. Remote Sens. 2020, 12, 1668. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Technical note: Flow velocity and discharge measurement in rivers using terrestrial and unmanned-aerial-vehicle imagery. Hydrol. Earth Syst. Sci. 2020, 24, 1429–1445. [Google Scholar] [CrossRef] [Green Version]
- Condomines, J.P.; Zhang, R.; Larrieu, N. Network intrusion detection system for uav ad-hoc communication: From methodology design to real test validation. Ad Hoc Netw. 2019, 90, 101759. [Google Scholar] [CrossRef]
- Chen, L.; Qian, S.; Lim, M.; Wang, S. An enhanced direct anonymous attestation scheme with mutual authentication for network-connected uav communication systems. China Commun. 2018, 15, 61–76. [Google Scholar] [CrossRef]
- Sun, H.; Duo, B.; Wang, Z.; Lin, X.; Gao, C. Aerial cooperative jamming for cellular-enabled uav secure communication network: Joint trajectory and power control design. Sensors 2019, 19, 4440. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zeng, Y.; Zhang, R. Cellular-enabled uav communication: A connectivity-constrained trajectory optimization perspective. IEEE Trans. Commun. 2019, 67, 2580–2604. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zeng, Y.; Zhang, R. UAV-enabled radio access network: Multi-mode communication and trajectory design. IEEE Trans. Signal Process. 2018, 66, 5269–5284. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular uav-to-x communications: Design and optimization for multi-uav networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, J.; Chen, J. Network-connected UAV communications: Potentials and challenges. China Commun. 2018, 15, 111–121. [Google Scholar]
- Rahman, U.S.; Kim, G.H.; Cho, Y.Z. Positioning of uavs for throughput maximization in software-defined disaster area uav communication networks. J. Commun. Netw. 2018, 20, 452–463. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3d-trajectory design and resource allocation for solar-powered uav communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Zhu, Q.; Zhu, H. Trajectory optimization and resource allocation for uav-assisted relaying communications. Wirel. Netw. 2020, 26, 739–749. [Google Scholar] [CrossRef]
- Antonio, G.P.; Maria-Dolores, C. Flying ad hoc networks: A new domain for network communications. Sensors 2018, 18, 3571. [Google Scholar]
- Liu, D.; Wang, J.; Xu, K.; Xu, Y.; Anpalagan, A. Task-driven relay assignment in distributed uav communication networks. IEEE Trans. Veh. Technol. 2019, 68, 11003–11017. [Google Scholar] [CrossRef]
- Lashari, H.N.; Ali, H.M. Implementation of cross layer design for efficient power and routing in uav communication networks. Stud. Inform. Control 2020, 29, 111–120. [Google Scholar]
- Keerthika, V.; Malarvizhi, N. Mitigate black hole attack using hybrid bee optimized weighted trust with 2-opt aodv in manet. Wirel. Pers. Commun. 2019, 106, 621–632. [Google Scholar] [CrossRef]
- Gurung, S.; Chauhan, S. A dynamic threshold based algorithm for improving security and performance of aodv under black-hole attack in manet. Wirel. Netw. 2019, 25, 1685–1695. [Google Scholar] [CrossRef]
- Amiri, E.; Hooshmand, R. Improved aodv based on topsis and fuzzy algorithms in vehicular ad-hoc networks. Wirel. Pers. Commun. 2020, 111, 947–961. [Google Scholar] [CrossRef]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and privacy issues of uav: A survey. Mob. Netw. Appl. 2020, 25, 95–101. [Google Scholar] [CrossRef]
- Gurung, S.; Chauhan, S. Performance analysis of black-hole attack mitigation protocols under gray-hole attacks in manet. Wirel. Netw. 2019, 25, 975–988. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure uav communication networks over 5g. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Shounak, S.; Balaso, J. Monarch-EWA: Monarch-earthworm-based secure routing protocol in IoT. Comput. J. 2020, 63, 817–831. [Google Scholar]
- Alouache, L.; Nguyen, N.; Aliouat, M.; Chelouah, R. Survey on iov routing protocols: Security and network architecture. Int. J. Commun. Syst. 2019, 32, e3849. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Liu, A.; Xiong, N.N.; Liu, F. A trust computing-based security routing scheme for cyber physical systems. ACM Trans. Intell. Syst. Technol. 2019, 10, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Neumann, A.; Navarro, L.; Cerda-Alabern, L. Enabling individually entrusted routing security for open and decentralized community networks. Ad Hoc Netw. 2018, 79, 20–42. [Google Scholar] [CrossRef] [Green Version]
- Kavitha, S.; Alphonse, P.J.A.; Reddy, Y.V. An Improved Authentication and Security on Efficient Generalized Group Key Agreement Using Hyper Elliptic Curve Based Public Key Cryptography for IoT Health Care System. J. Med. Syst. 2019, 43, 260. [Google Scholar] [CrossRef]
- Cerri, D.; Ghioni, A. Securing aodv: The a-saodv secure routing prototype. IEEE Commun. Mag. 2008, 46, 120–125. [Google Scholar] [CrossRef]
- Hurley-Smith, D.; Wetherall, J.; Adekunle, A. Superman: Security using pre-existing routing for mobile ad hoc networks. IEEE. Trans. Mob. Comput. 2017, 16, 2927–2940. [Google Scholar] [CrossRef]
- Vanitha, K.; Rahaman, A.M.J.Z. Preventing malicious packet dropping nodes in MANET using IFHM based SAODV routing protocol. Cluster Comput. 2019, 22, 13453–13461. [Google Scholar] [CrossRef]
- Chakravarthy, V.J. Comparative analysis of SRAAA, SDSR, SAODV routing protocol for video streaming in MANET. Indonesian. J. Electric. Eng. Comput. Sci. 2018, 11, 1075–1082. [Google Scholar] [CrossRef]
- Jyh-haw, Y. A secure time-bound hierarchical key assignment scheme based on rsa public key cryptosystem. Inf. Process. Lett. 2008, 105, 117–120. [Google Scholar]
- Do, T.; Park, S.; Lee, J.; Park, S. M-folding method–based elliptic curve cryptosystem for industrial cyber-physical system. Int. J. Distrib. Sens. Netw. 2019, 15, 1–9. [Google Scholar] [CrossRef]
- Wang, C.; Ding, K.; Li, B.; Zhao, Y.; Xu, G.; Guo, Y. An enhanced user authentication protocol based on elliptic curve cryptosystem in cloud computing environment. Wirel. Commun. Mob. Comput. 2018, 2018, 1–13. [Google Scholar] [CrossRef]
- Yohan, P.; Youngho, P. Three-factor user authentication and key agreement using elliptic curve cryptosystem in wireless sensor networks. Sensors 2016, 16, 2123. [Google Scholar]
- Shen, H.; Kumar, N.; He, D.; Shen, J.; Chilamkurti, N. A security-enhanced authentication with key agreement scheme for wireless mobile communications using elliptic curve cryptosystem. J. Supercomput. 2016, 72, 3588–3600. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Deciphering Time/MIPS-a | RSA Key Length/Bit | ECC Key Length/Bit | RSA/ECC Key Length Ratio |
|---|---|---|---|
| 104 | 512 | 106 | 5:1 |
| 108 | 768 | 132 | 6:1 |
| 1012 | 1024 | 160 | 7:1 |
| 1020 | 2048 | 210 | 10:1 |
| Signature Length/Bit | Encrypted Message Length/Bit | |
|---|---|---|
| RSA | 1024 | 1024 |
| DSA | 320 | - |
| ElGamal | - | 2048 |
| ECC | 320 | 320 |
| Symbol | Definition |
|---|---|
| Identity information of node i | |
| q | The size of a finite field, which is a prime or a power of two, is about 160 bits long. |
| Elliptic curve based on finite field | |
| G | The base point on the , whose order is n, where n is a large prime (160 bits) |
| Take the abscissa value of point G | |
| Private key of node u | |
| Public key of node u | |
| M | Routing information to be signed |
| A | Node that signs routing information |
| B | Node that verifies signature |
| Private key of system CA, | |
| Public key of system CA, and | |
| One-way hash function |
| Parameter | Value |
|---|---|
| Moving range of UAV | 1000 m × 1000 m |
| UAV mobile model | Random waypoint |
| Number of UAVs | 50 |
| Maximum speed of UAV | 0–20 m/s |
| Traffic type | CBR |
| Packet transmission rate | 4 packet/s |
| The size of packet | 512 Byte |
| MAC protocol | 802.11 b |
| Data rate | 1 Mbps |
| Routing protocol | AODV, SAODV, ISAODV |
| Simulation time | 300 s |
| Carrier sensing distance | 550 m |
| UAV node coverage | 250 m |
| Bandwidth | 2 Mbps |
| Transmission power | 0.28 W |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, X.; Zuo, Z.; Su, S.; Guo, X.; Sun, X. Research of Security Routing Protocol for UAV Communication Network Based on AODV. Electronics 2020, 9, 1185. https://doi.org/10.3390/electronics9081185
Tan X, Zuo Z, Su S, Guo X, Sun X. Research of Security Routing Protocol for UAV Communication Network Based on AODV. Electronics. 2020; 9(8):1185. https://doi.org/10.3390/electronics9081185
Chicago/Turabian StyleTan, Xiaopeng, Zhen Zuo, Shaojing Su, Xiaojun Guo, and Xiaoyong Sun. 2020. "Research of Security Routing Protocol for UAV Communication Network Based on AODV" Electronics 9, no. 8: 1185. https://doi.org/10.3390/electronics9081185
APA StyleTan, X., Zuo, Z., Su, S., Guo, X., & Sun, X. (2020). Research of Security Routing Protocol for UAV Communication Network Based on AODV. Electronics, 9(8), 1185. https://doi.org/10.3390/electronics9081185