1. Introduction
Rayleigh–Taylor instability (RTI) plays an important role in a broad range of plasma processes in nature and technology under conditions of high and low energy densities [
1,
2,
3,
4,
5,
6]. Examples include the abundance of chemical elements in supernova remnants, the influence of irregularities in the Earth’s ionosphere on regional climate change, the formation of hot spots in inertial confinement fusion, and the efficiency of plasma thrusters [
7,
8,
9,
10,
11,
12]. While realistic plasma processes are necessarily electro- and magneto-dynamic, the control of Rayleigh–Taylor (RT) phenomena often require a better understanding of the fluid dynamic aspects [
4]. In this work, we study, both analytically and numerically, RTI driven by constant acceleration in neutral plasma (fluid). We employ the group theory approach and the analysis of numerical data of Front Tracking simulations [
4]. We reveal independent driving constituents that the RT flow possesses in the scale-dependent and self-similar regimes.
RT unstable interfaces and interfacial mixing play an important role in plasma processes at astrophysical and atomic scales [
4]. In core-collapse abarzhi-2019, RT mixing of materials of the progenitor star enable conditions for synthesis of heavy mass chemical elements [
7,
13,
14,
15,
16,
17]. In the Sun, RT mixing is responsible for the accelerated ejection of matter in downdrafts propagating deeply inside of the convection zone [
18]. In the inertial confinement fusion, the unstable interface between the hotter plasma, the colder plasma, and the ensued interfacial mixing influence the formation and shape of the hot spot [
9,
10,
16,
19,
20,
21,
22,
23,
24]. In the Earth’s ionosphere, RT unstable plasma structures are directly relevant to the climate change on regional scales [
25]. In plasma processes in technology, RT unstable interfaces are inherent in light–matter interaction, nanofabrication, and in the plasma discharges formed in and interacting with liquids [
26,
27,
28,
29].
In even vastly distinct physical conditions, RT flows exhibit similar features in their evolution [
4,
30,
31,
32]. RTI develops when fluids of different densities are accelerated against their density gradients [
1,
2]. Small perturbations at the fluid interface grow quickly. The flow proceeds to the nonlinear regime. The interface is transformed to a composition of small-scale shear-driven vortical structures and a large-scale coherent structure, with the heavy (light) fluid penetrating the light (heavy) fluid in bubbles (spikes) [
3,
4]. Eventually, the flow transitions to a state of intense interfacial mixing, where the amplitude of the mixing layer increases quadratically with time [
5]. RT mixing is self-similar, anisotropic, heterogeneous, and sensitive to deterministic conditions [
4,
33].
RTI and RT mixing are challenging to study in experiment, in theory, and in simulation [
4]. RT experiments impose tight requirements on the flow implementation, diagnostics, and control [
6,
34]. RT simulations need to track unstable interfaces, capture small-scale processes, and ensure large spans of spatial and temporal scales [
31,
35]. In RT theory, we have to solve a boundary value problem at the unstable freely evolving interface, identify asymptotic solutions, and capture symmetries of the singular and ill-posed RT dynamics [
4].
Significant success has recently been achieved in theory, simulation, and experiments of RT dynamics [
6]. In particular, the group theory approach has identified the asymptotic solutions and the invariant forms of RT dynamics in the scale-dependent and self-similar regimes, and has explained the experimental observation that RT mixing may keep order even at high Reynolds numbers [
6,
34,
36]. The Front Tracking simulations and the associated merger model of the numerical data have provided experiments with accurate practical mechanisms for the evolution of RT mixing and found that numerical values of the mixing zone growth agreed with experiments [
5].
In RT flow, two key constituents govern the specific (per unit mass) dynamics of a fluid parcel: the rate of momentum gain (a buoyant force) and the rate of momentum loss (an effective dissipation force) [
4,
5,
37]. The buoyant force accelerates the fluid parcel, whereas the effective dissipation decelerates it and drags it from free fall [
5,
33]. We need to better understand whether these buoyancy and drag constituents can be treated as independent processes in the scale-dependent linear regime, scale-dependent nonlinear regime, and self-similar mixing regime. We have to examine whether the group theory approach and the analysis of data of the Front Tracking simulations are consistent with one another [
5,
33].
In this work, we investigate, both theoretically and numerically, RT dynamics with constant acceleration. In theoretical analysis, we employ the group theory approach to directly link the governing equations to the momentum model and to precisely derive the buoyancy and drag parameters for the bubble and spike in the linear, nonlinear, and mixing regimes [
38]. In numerical analysis, we analyze 2D experimental and 3D simulation studies of RT mixing. We construct 2D and 3D merger trees illustrating the merger process. We find that predictions made by the merger model are in agreement with physical experiments and are better than previously reported. Based on our analytical and numerical results, we reveal that the buoyant force and the effective drag force are independent constituents governing RT dynamics in each of the regimes (linear, nonlinear, and mixing). We discuss the implications of our considerations for experiments in plasmas, including inertial confinement fusion [
9,
34].
Fluid instabilities and interfacial mixing are a subject of active research in contemporary plasma physics [
4,
5,
10,
12,
13,
21,
22,
24,
27,
28,
39,
40]. The novelty of our work is in the rigorous theoretical solution of RT dynamics and in the detailed analysis of the numerical data of Front Tracking numerical simulations. The group theory approach precisely derives from the governing equations the independent driving constituents of RT dynamics. The interpretation of the analyzed numerical data of Front Tracking simulations agrees with experiments. Our results provide extensive benchmarks for plasma processes to which RT instability and RT mixing are relevant.
Our paper has the following structure. After Introduction, we proceed to the mathematical problem of RT dynamics in
Section 2.
Section 3 presents the group theory approach.
Section 4 provides analytical results for the buoyancy and drag parameters in linear and nonlinear RTI.
Section 5 illustrates in detail the properties of special analytical solutions in the nonlinear regime.
Section 6 investigates analytically the regime of self-similar mixing.
Section 7 presents the numerical approach.
Section 8 studies the merger process of two-dimensional bubbles and presents the two-dimensional merger trees.
Section 9 focuses on the merger process of three-dimensional bubbles and presents three-dimensional merger tree figures.
Section 10 investigates simulation growth rates.
Section 11 reviews the merger model.
Section 12 discusses the application of the merger model to experiments.
Section 13 discusses the outcomes of our work.
Section 14 presents the conclusions.
2. Mathematical Problem of RT Dynamics
We consider immiscible, inviscid fluids of differing densities separated by a well-defined interface. The heavier fluid sits above the lighter fluid and the entire system is subject to a time-dependent downwards acceleration field. The dynamics of such fluids are governed by conservation of mass, momentum, and energy:
where
,
are the spatial coordinates,
t is time, (
are the fields of density
, velocity
, pressure
P, and energy density
, and
e is the specific internal energy [
4,
13,
32].
It is necessary that momentum is conserved at the interface and that there can be no mass flow across it. Hence, the boundary conditions at the interface are
where
denotes the jump of functions across the interface;
is the specific enthalpy;
and
are the normal and tangential unit vectors of the interface with
and
;
is a local scalar function, with
at the interface and
in the bulk of the heavy (light) fluid, indicated hereafter by subscript
. The initial conditions consist of initial perturbations of the flow fields and the interface. The flow is periodic in plane
normal to the
z-direction, as is set by the initial conditions [
4,
32,
38].
Instability is driven by acceleration. Acceleration can be due to a body force and be directed from the heavy to the light fluid. It can also be the acceleration of the (nearly planar) interface (i.e., the inertial acceleration) and be directed from the light to the heavy fluid. In our work, acceleration
is due to a body force and is directed from the heavy to the light fluid along the
z-axis
. This acceleration modifies the pressure field:
. We assume that there are no mass sources and hence the velocity in the upper (lower) fluid moves to zero as
(
). The Atwood number
parameterizes the ratio of the fluid densities [
4,
13,
32].
The mathematical problem of RTI requires one to solve the system of nonlinear partial differential equations in four-dimensional space-time, the boundary value problems at the unstable nonlinear interface and at the outside boundaries, and also the ill-posed initial value problem with account for non-locality and singularities [
4,
13,
41,
42]. In our work, we solve this problem analytically by employing group theory approach [
4,
13] and numerically by analyzing data from Front Tracking simulations.
4. Analytical Quantities for Buoyancy and Drag
To derive expressions for buoyancy and drag parameters in RT dynamics, we directly link the dynamical system and the momentum model.
4.1. Scale-Dependent Linear Dynamics
In the dynamical system, we associate the curvature with the amplitude,
, and retain only first-order harmonics in expressions for the moments. In the momentum model, we relate the vertical scale with amplitude
, and the length-scale with wavevector,
[
38]. This transforms the governing equations to
where the buoyancy parameter is
with
for bubbles and
for spikes, and the drag parameter is constant,
; subscript
l stands for linearity. By integrating these equations, we obtain solutions for RT dynamics of bubbles (spikes) moving up (down) and being concave down (up) with
,
,
(
,
,
):
where
and
are determined by initial conditions
and
. These results hold for
and
.
The formation of bubbles and spikes is defined by the initial conditions, with bubbles developing for and spikes developing for . For both bubbles and spikes, the magnitude of the curvature increases with time, and the magnitude of the velocity also increases.
In the linear regime, buoyancy grows with amplitude, and the constant drag is set by the initial conditions. The linear RT dynamics of bubbles and spikes are single-scale and defined by the horizontal scale—the wavelength of the coherent structure.
4.2. Scale-Dependent Nonlinear Dynamics
As time progresses, the bubble/spike amplitude increases, its curvature approaches a constant value, and RT dynamics become nonlinear.
In a dynamical system, we impose a constant curvature condition and retain higher-order harmonics in the moments. In the momentum model, we relate the vertical scale with the amplitude,
, and the length-scale with the wavevector,
. This transforms the governing equations to
For square symmetry, buoyancy parameter
and drag parameter
are, respectively,
in domain
with
. Sub-script
n stands for nonlinearity.
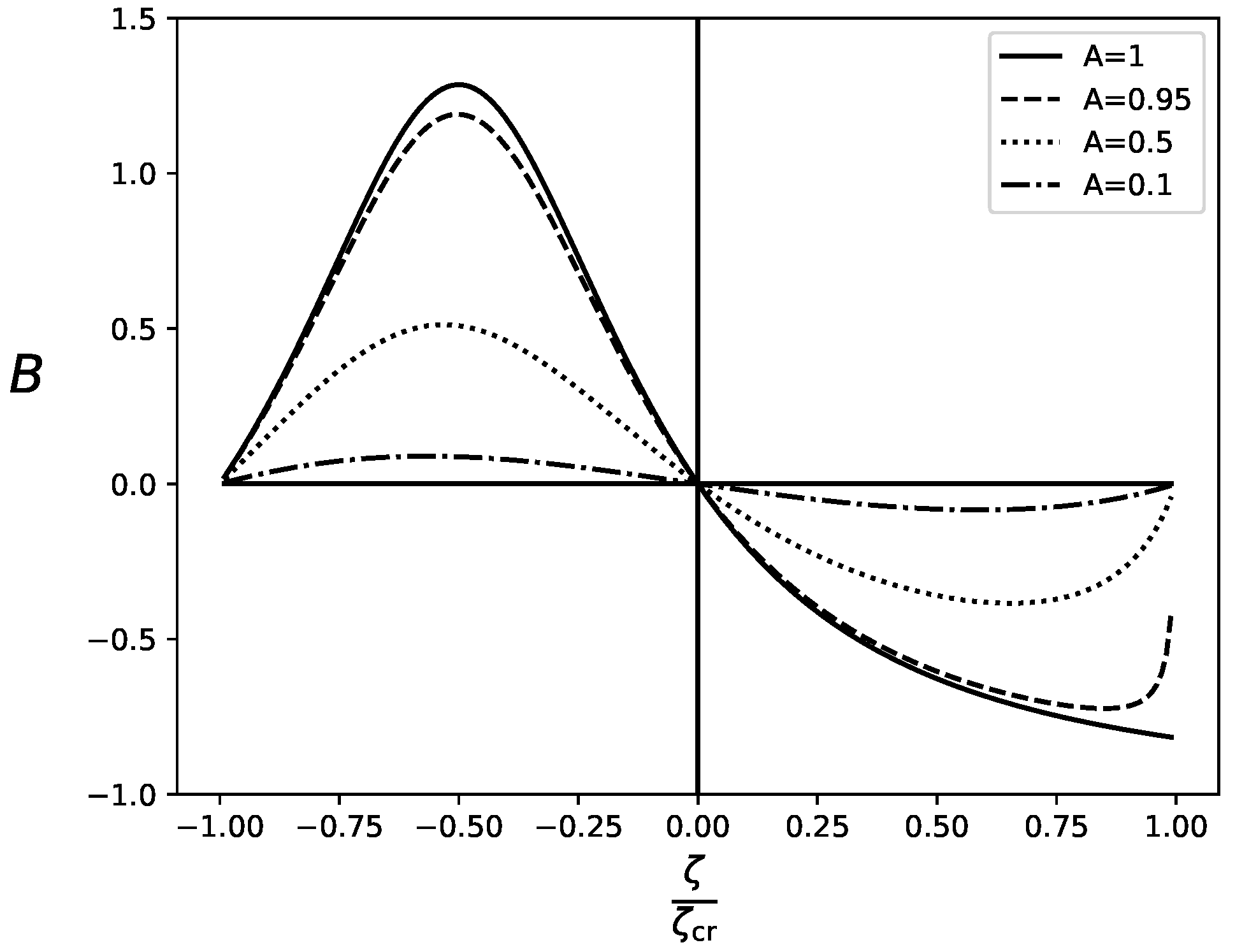
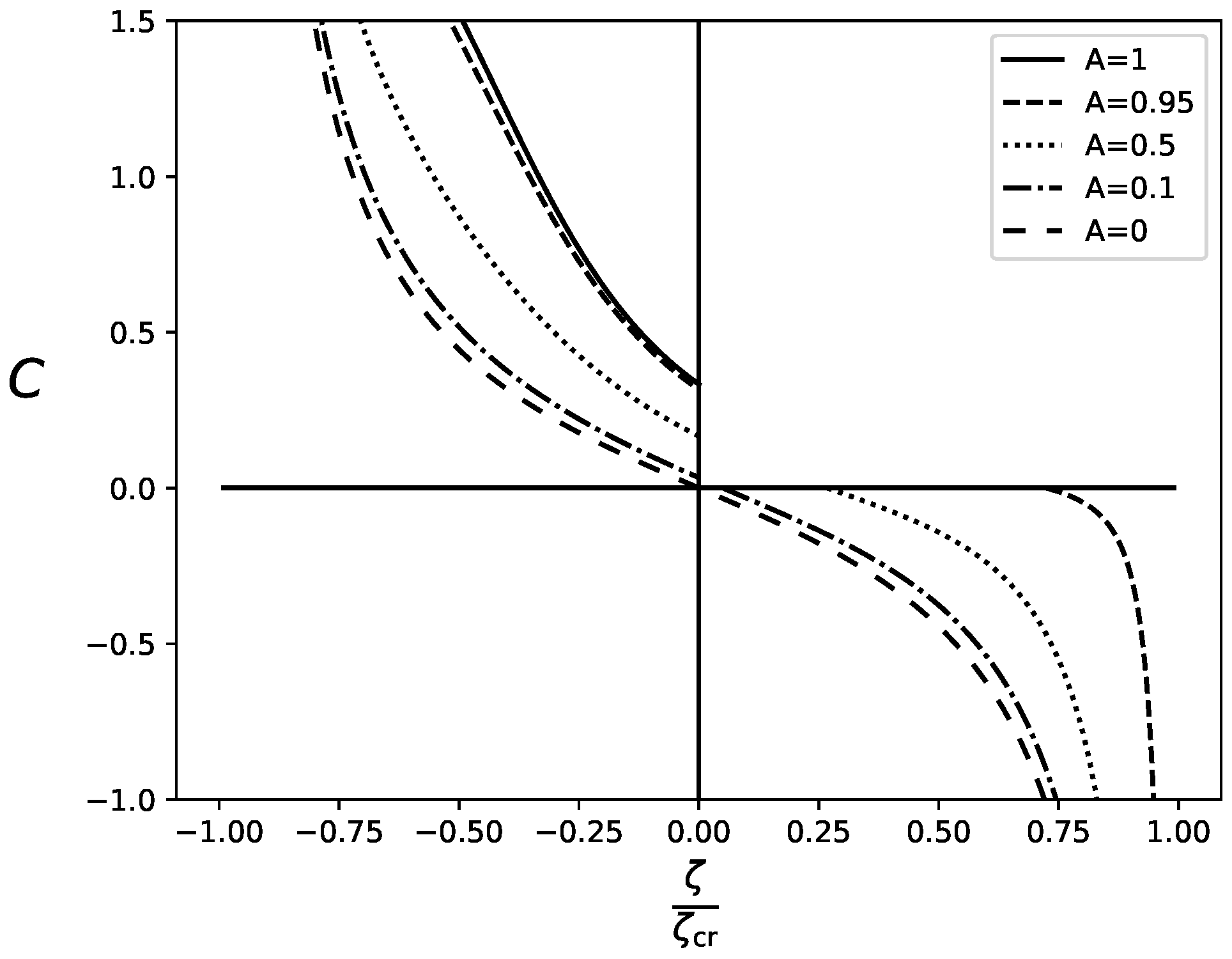
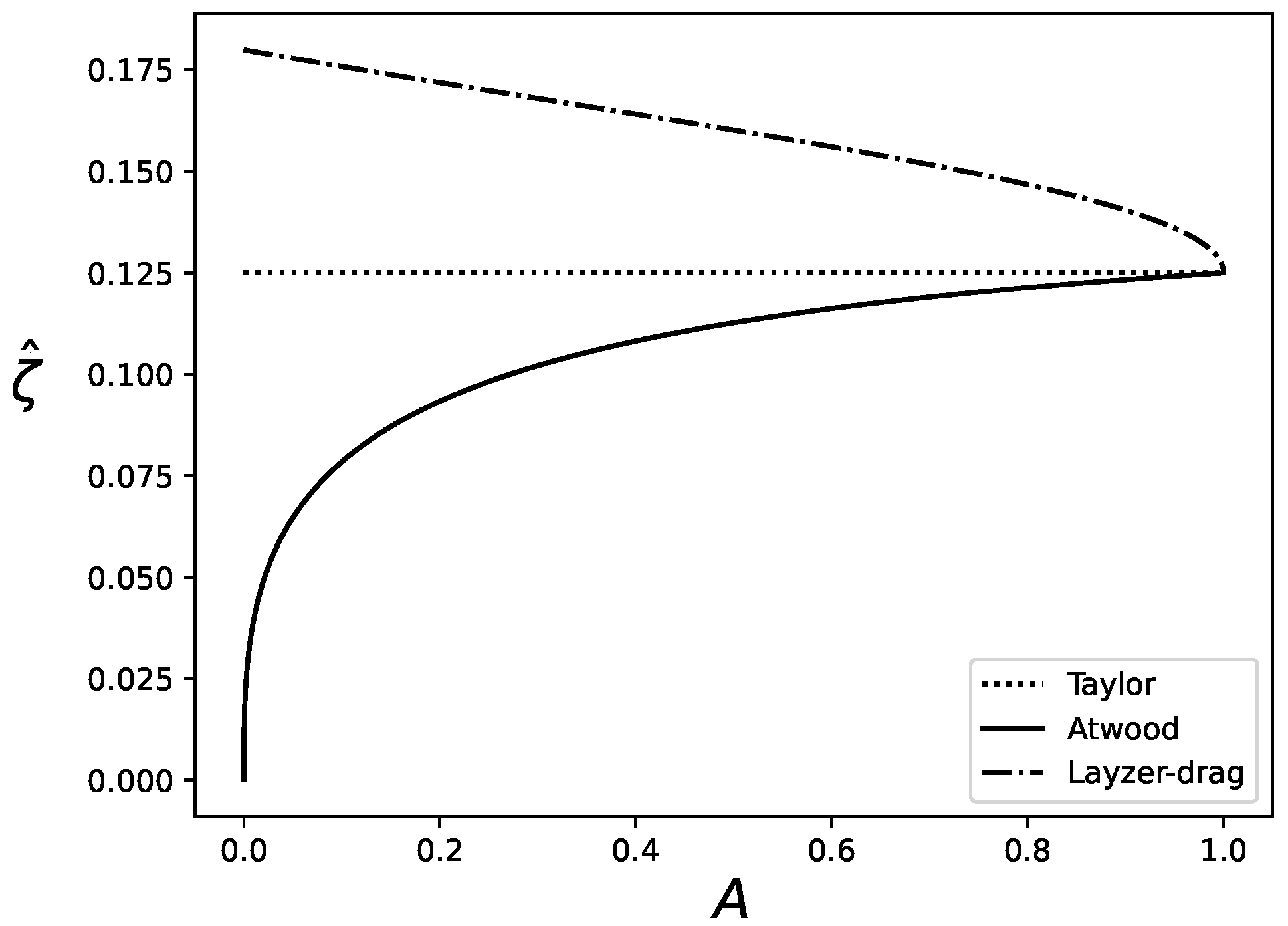
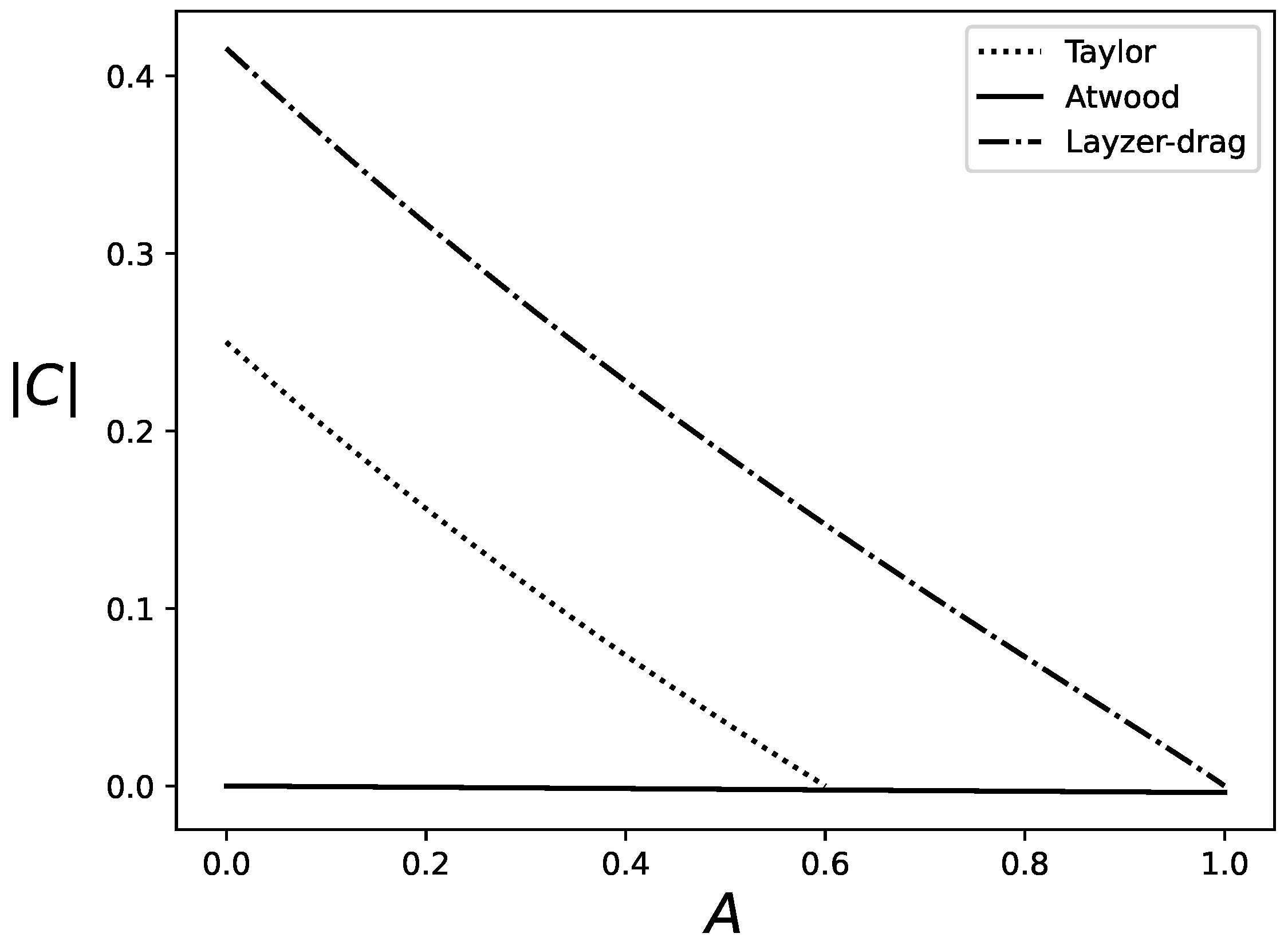
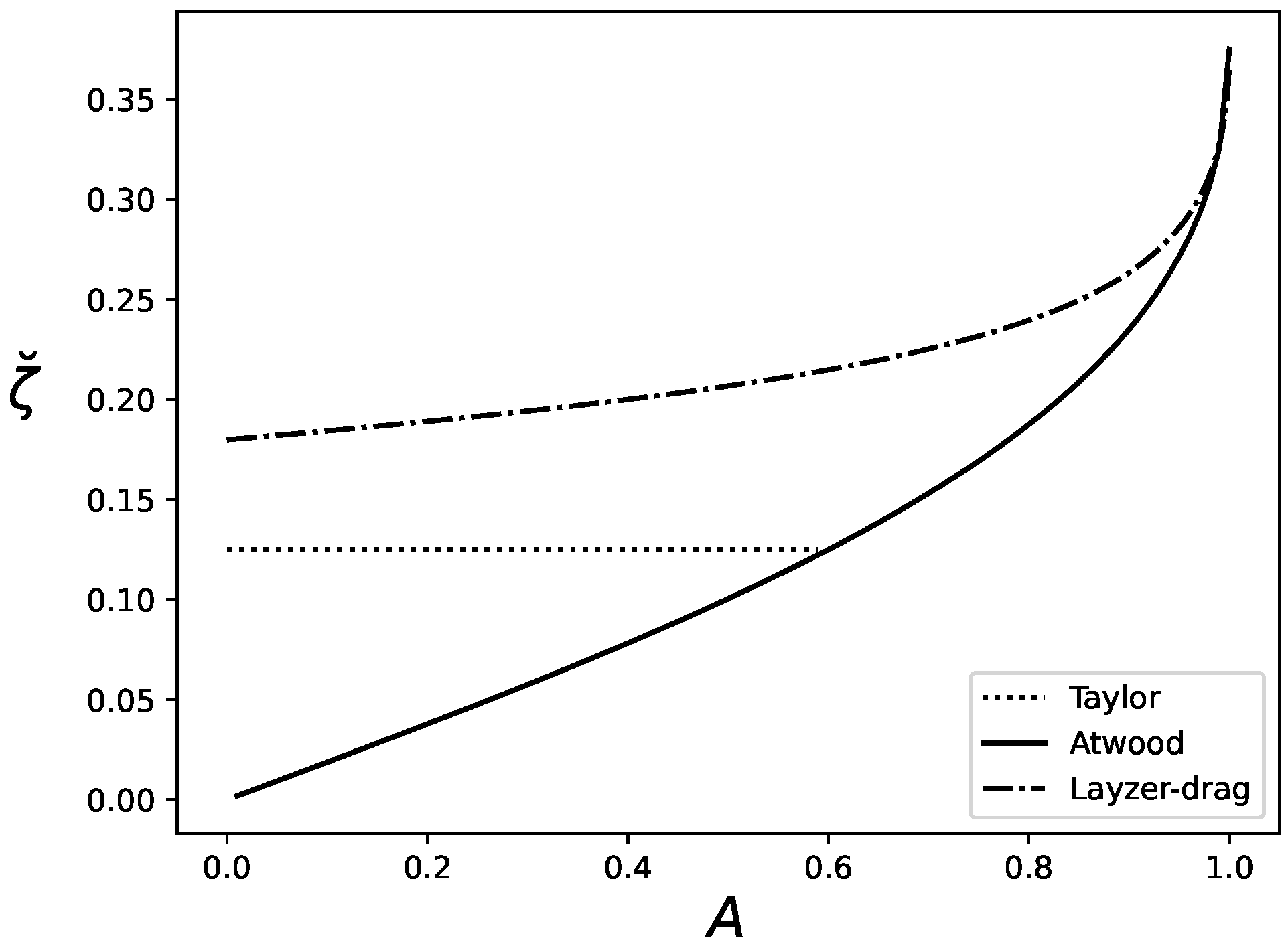
Figure 1 and
Figure 2 are the plots of buoyancy and drag parameters, respectively, in nonlinear RT dynamics.
For RT bubbles, the values of buoyancy and drag parameters are
,
for
with
,
, and
. For RT spikes, the values are
with
,
, for
, and
with
, for
. Here,
,
is the curvature of the fastest spike; we call it the Atwood spike. A spike has unbounded velocity when the drag parameter is zero. This occurs for
, where
Hence, we find that for nonlinear RT dynamics, there is a family of buoyancy and drag values parameterized by the interface morphology, that is, the curvature of the bubble/spike; for given , values are constant. The non-uniqueness is due to the presence of shear at the interface. This can be seen by defining the shear function as the spatial derivative of the jump of tangential velocity at the interface. It is near the tip of the bubble/spike.
Asymptotically, the solution of the second of Equations (
9) is
For square symmetry
, this velocity is
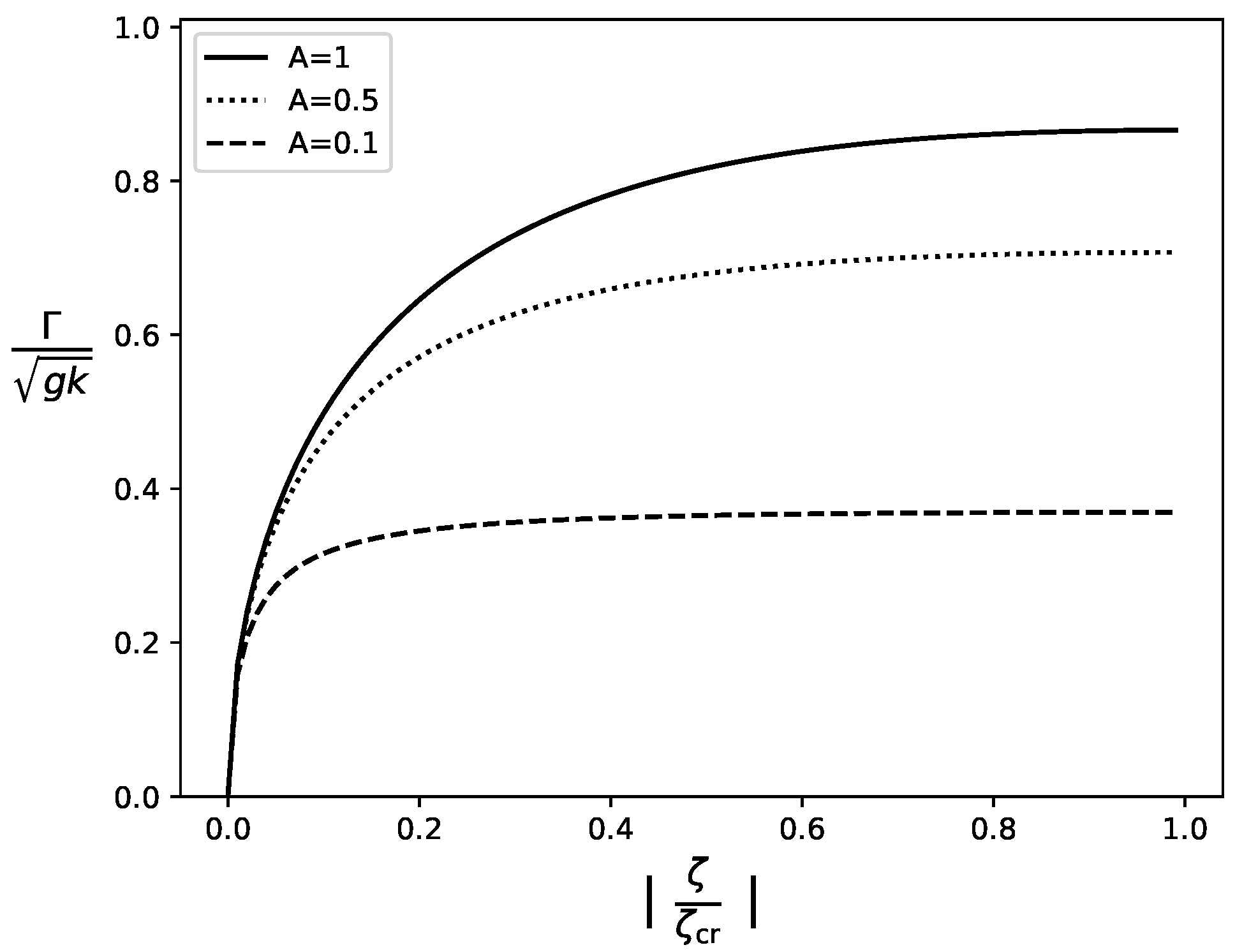
and the corresponding shear function is
In Equations (
12) and (
13), the positive sign applies for bubbles and the negative sign applies for spikes.
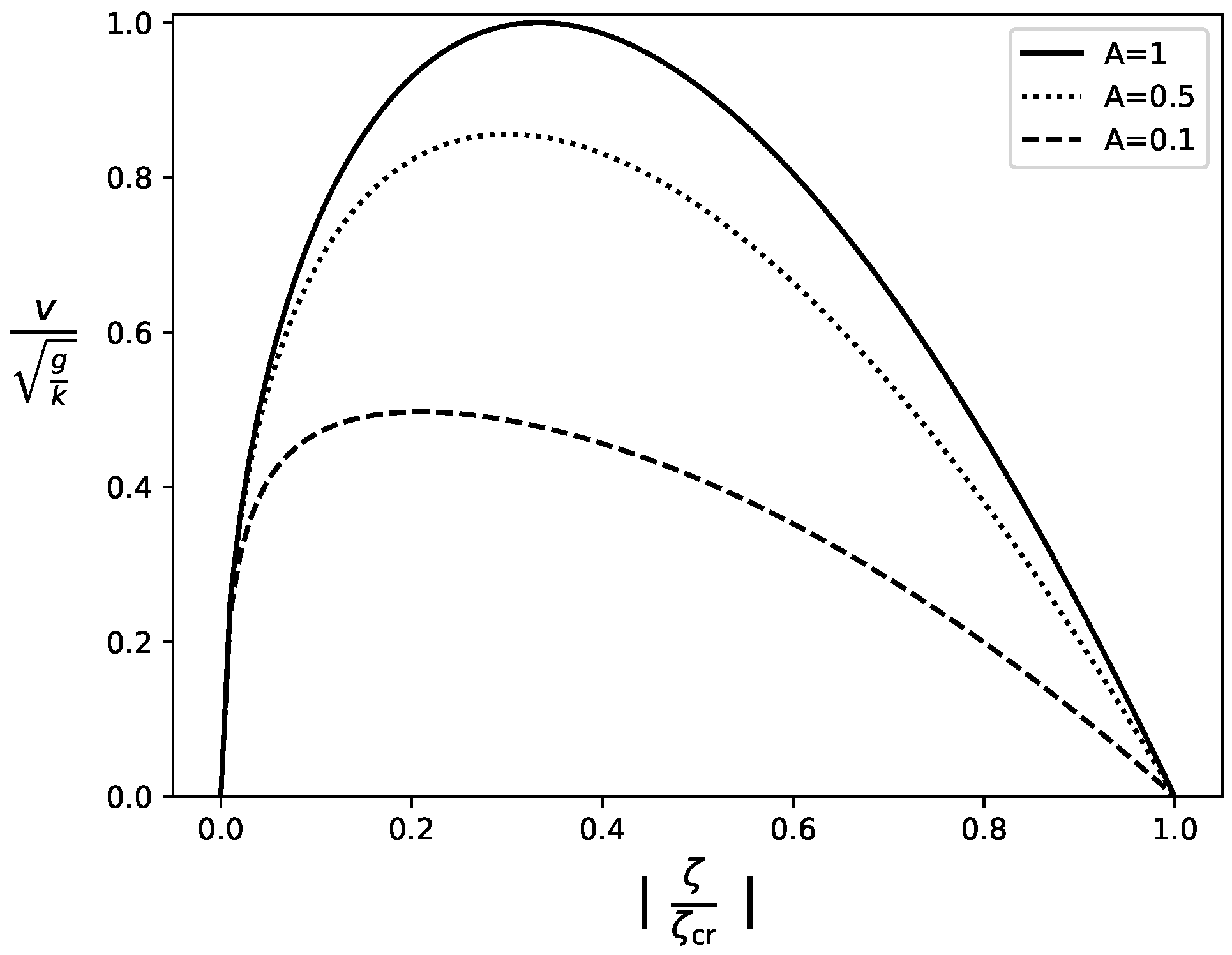
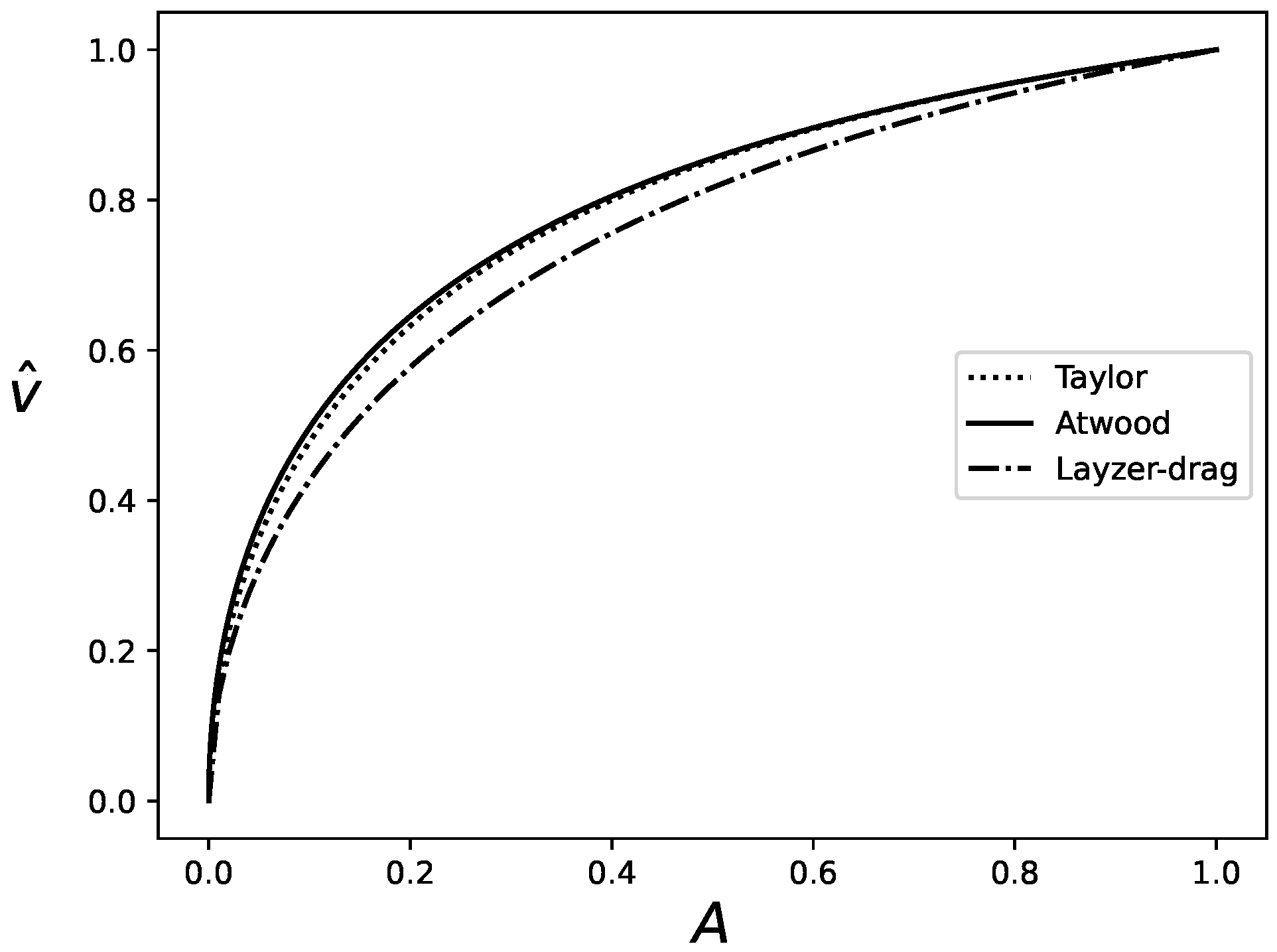
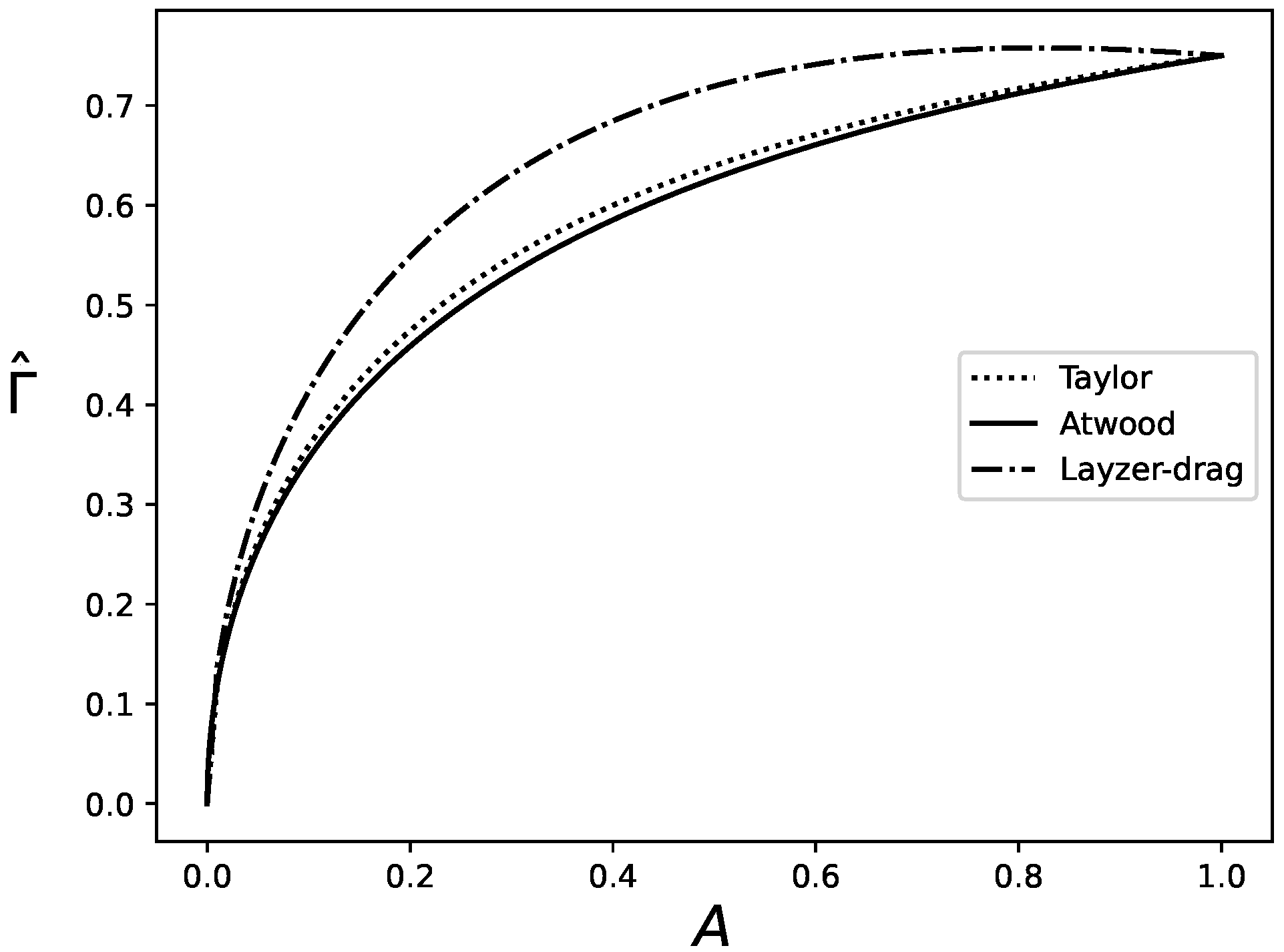
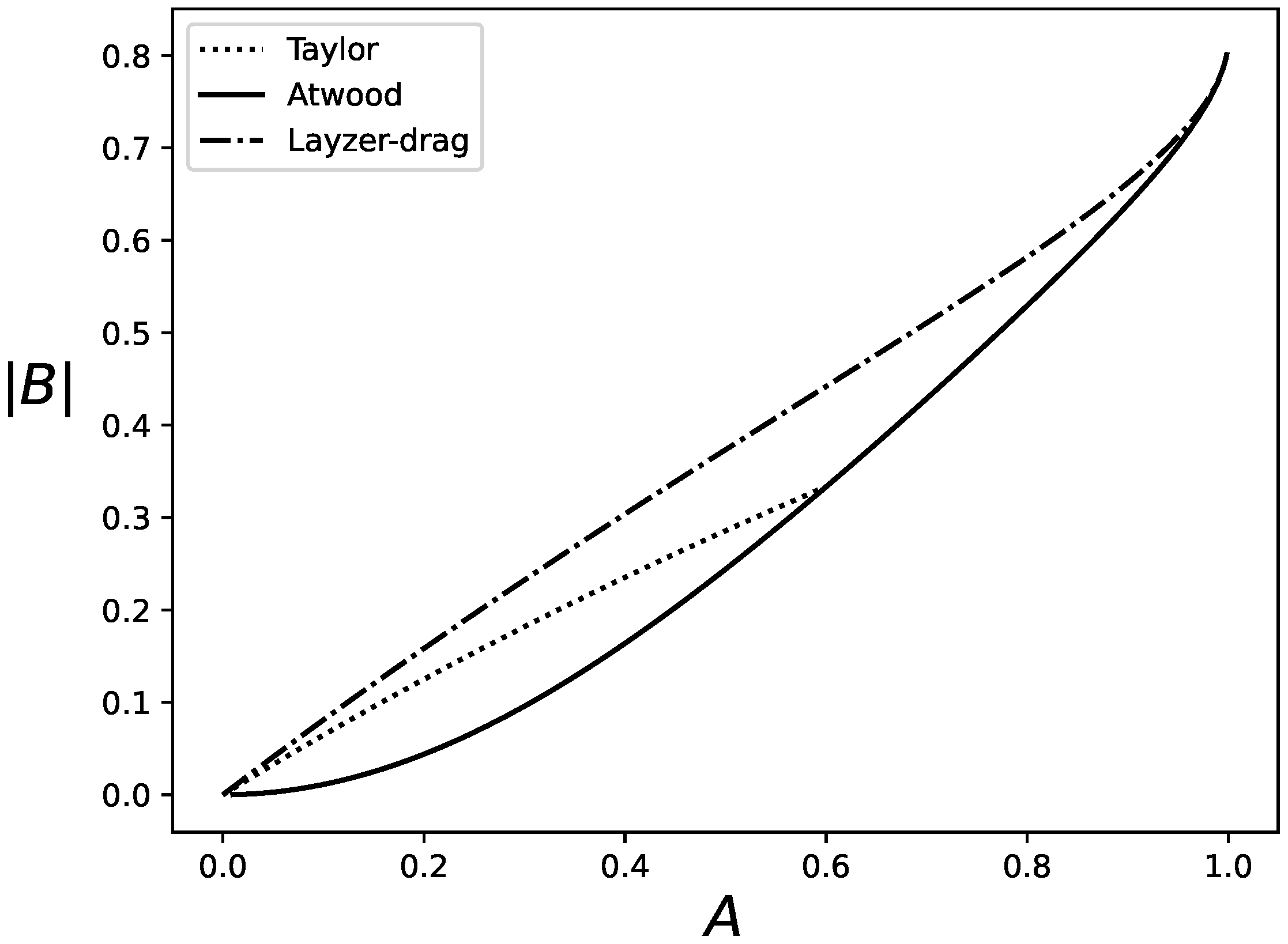
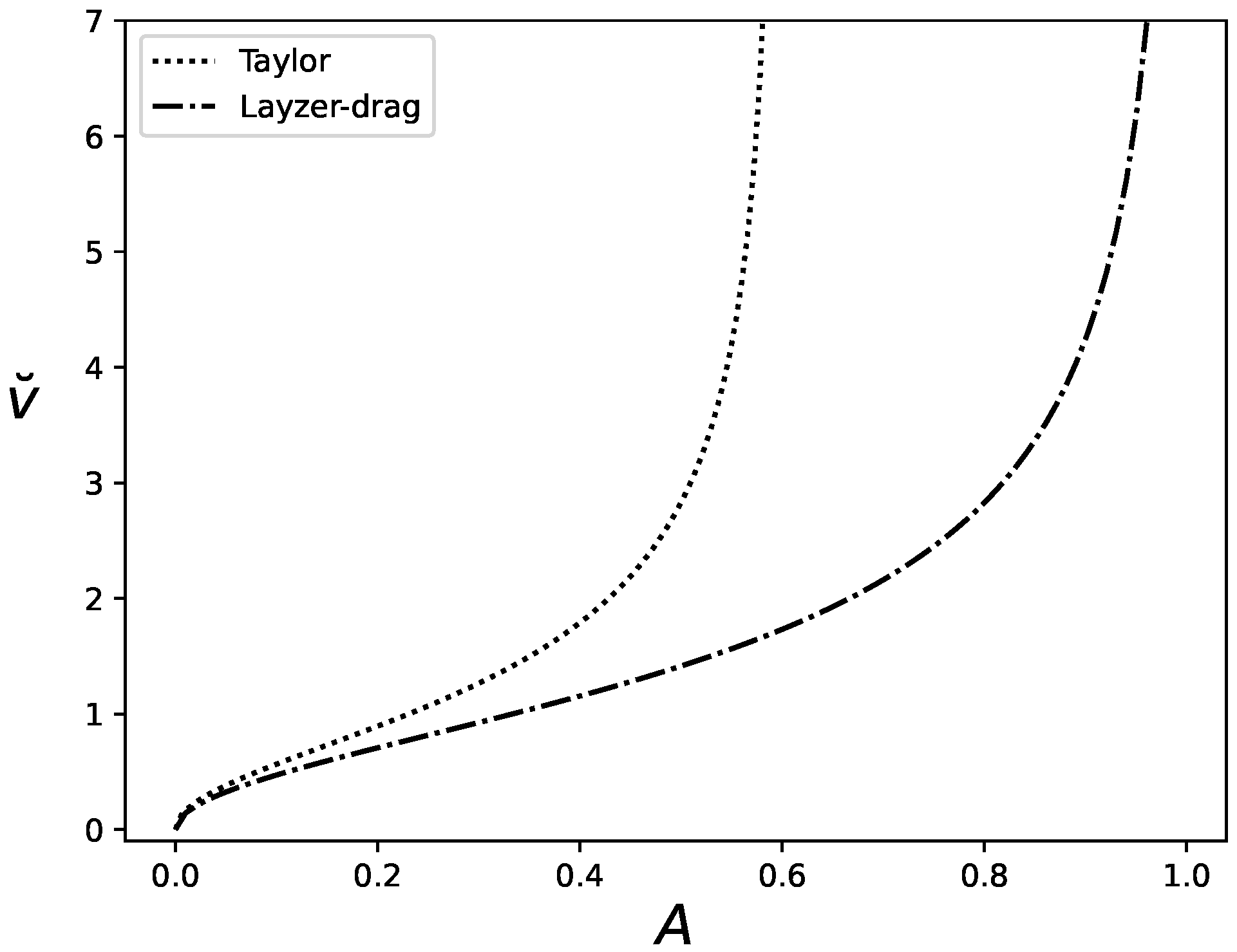
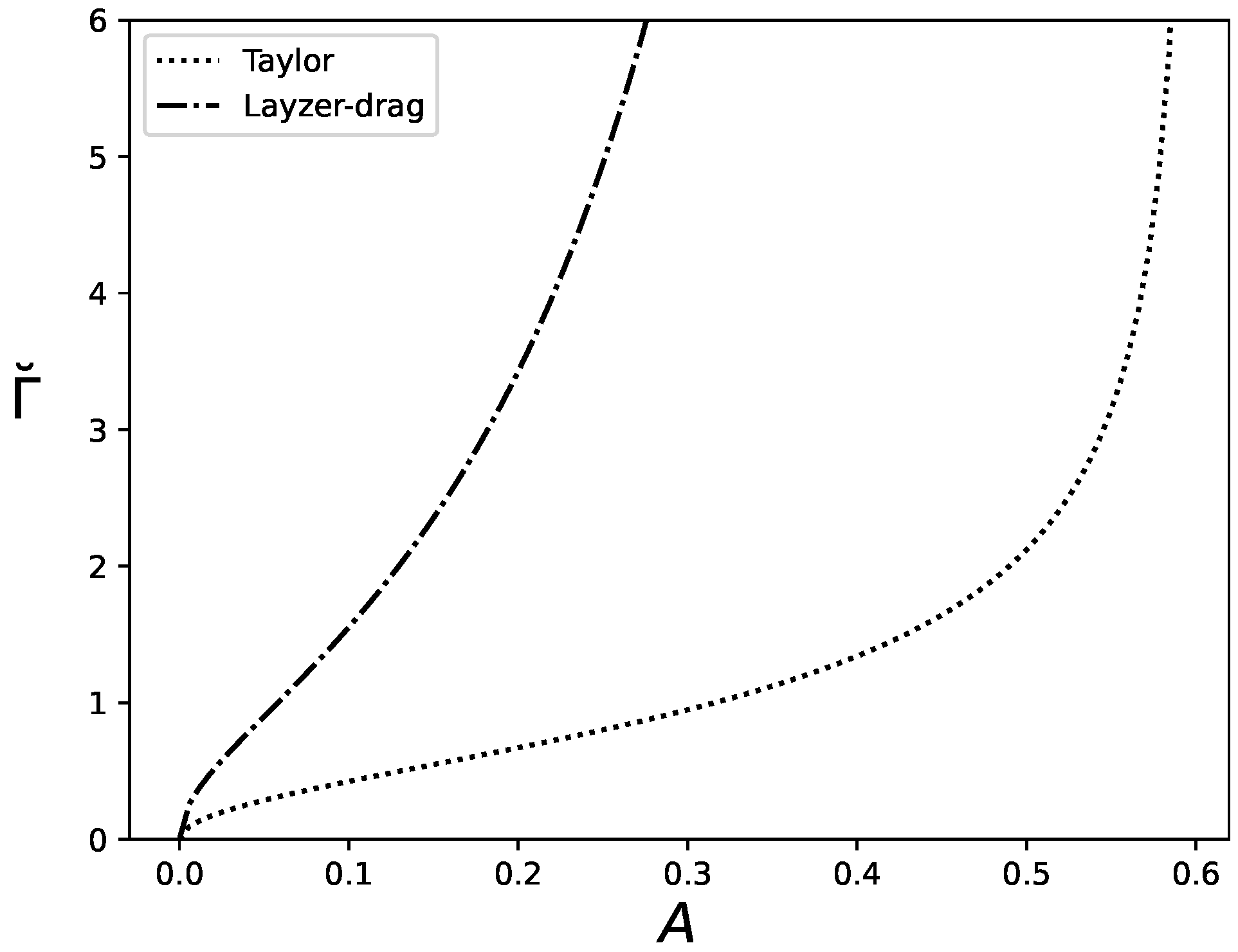
Figure 3 and
Figure 4 show the bubble tip velocity and shear function, respectively, as functions of the bubble curvature.
Figure 5 and
Figure 6 show the spike tip velocity and shear function, respectively, as functions of the spike curvature.
Differentiating Equation (
12) with respect to
and setting the result to zero shows that curvature
which maximizes velocity satisfies equation
By solving this equation and substituting the solution into Equation (
12), we find that the corresponding maximum velocity is
This is a universal relation between the curvature and the maximum velocity. We refer to this bubble as the ‘Atwood’ bubble to emphasize its dependence on the Atwood number.
RT dynamics are set by the interplay of buoyancy and drag for a given interface morphology and shear. The dynamics of RT bubbles are regular and influenced by a few competing factors: bubbles with larger curvature have larger buoyancy and move faster than flattened bubbles; yet, bubbles with larger curvature have larger shear and larger drag reducing their velocities; for curved bubbles, the shear alone can maintain the pressure at the interface, leading to zero buoyancy and infinite drag.
The dynamics of RT spikes are singular. While the magnitude of the spike’s buoyancy is qualitatively similar to that of the bubble, the spike’s drag vanishes for . This leads to a singularity indicating that the RT Atwood spike has velocity and shear growing quickly with and .
The nonlinear RT dynamics of bubbles/spikes are multi-scale and defined by the two macroscopic length scales—the vertical and horizontal scales—the amplitude and wavelength of the structure, respectively. Mathematically, the (as we call it) multi-scalability is associated with the dependence of the buoyancy and the drag parameters on the interface morphology and shear. Physically, it can be understood by viewing RT coherent structures as standing waves with growing amplitudes. This reveals the mechanisms of the transition of RT dynamics from the scale-dependent to scale-invariant regimes. Particularly, the traditional merger and amplitude dominance mechanisms can both lead to the acceleration of RT bubbles/spikes due to drag force reduction, and can transfer scale-dependent dynamics to scale-invariant mixing .
6. Self-Similar Mixing
In the mixing regime, the dynamical system is generalized as
In the momentum model, we relate the length-scale for energy dissipation with the amplitude as
, and we set
,
, where subscript
m stands for mixing. The buoyancy and drag are free values due to the many scales contributing, with
for bubbles (spikes) with
(
. Herein, we consider
. Our consideration can also be applied for
; see works [
4,
33,
36].
We solve the model equation in domain
,
for constant
and with initial conditions
,
:
The solution is sought in the physical domain with
and with initial conditions
,
, and
[
4,
36].
The associated homogeneous equation is
. It can be solved by the method of separation of variables leading to the general solution, with integration constants
,
, as
where subscript
d stands for dissipative dynamics. For
, the solution is
To find a particular solution for the non-homogeneous equation , we invoke Lie group analysis and employ one-parameter scaling transformation , , where and are the transformation’s parameter and constant. This leads to and hence and the corresponding invariant . The particular solution is , where subscript a stands for accelerative dynamics. The general solution is a function of the dissipative and accelerative solutions, .
Whilst solutions
and
should be coupled because of the nonlinear nature of the differential equation, it has, in fact, the remarkable property that in the respective asymptotic regimes,
and
, solutions
and
are effectively decoupled. This decoupling is due to the distinct symmetries of the solutions,
and
[
4,
36].
For
, the gains and losses are fully balanced,
and
. For
, the gains and losses are unbalanced,
and
[
4,
36]. According to data, the imbalance is small,
[
5]. This slight imbalance results in the flow acceleration and in the development of self-similar RT mixing: parcel of the heavy fluid moves in the acceleration direction, parcel of the light fluid moves against the acceleration direction, the position of the center of mass of the fluid system changes, energy is gained, almost all of this gain effectively dissipates, and its remnant leads to flow acceleration [
4,
36]. The transition from nonlinear RTI to RT mixing may occur via the growth of the horizontal scale, as the merger model predicts [
5].
7. Numerical Approach
Assuming that acceleration is uniform in time, we recall that the penetration of the bubble interface into the heavier fluid occurs on an acceleration-determined time scale and follows a
scaling law. The penetration distance of the light fluid into the heavy fluid is known to be given by
where
is the Atwood number, a relative density difference that modifies the uniform acceleration,
g. Here,
(
) denotes the density of the light (heavy) fluid. The constant
is a growth rate parameter.
This remainder of this paper analyzes RT mixing data in depth, with archived data that could be used in future studies of bubble merger. Here, we analyze 2D experimental and 3D simulation studies of RT mixing; 2D and 3D merger trees are constructed as a result of this process. In these figures, the bubble merger process occurring over multiple time steps can be observed. Detailed analysis of all measured properties of each bubble are recorded in a spreadsheet (not included here due to its size), and will aid in any further analyses; see
Section 8 and
Section 9.
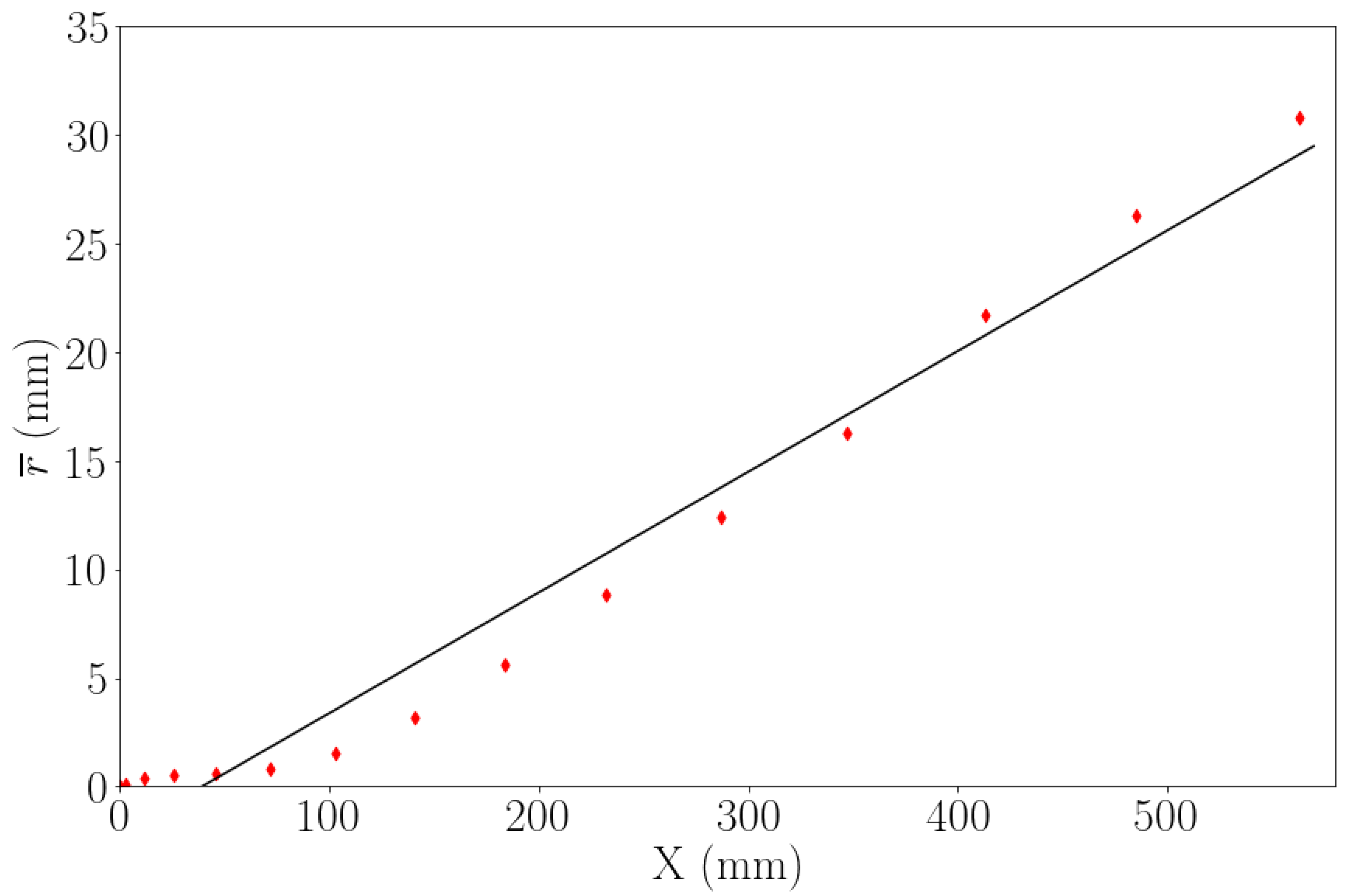
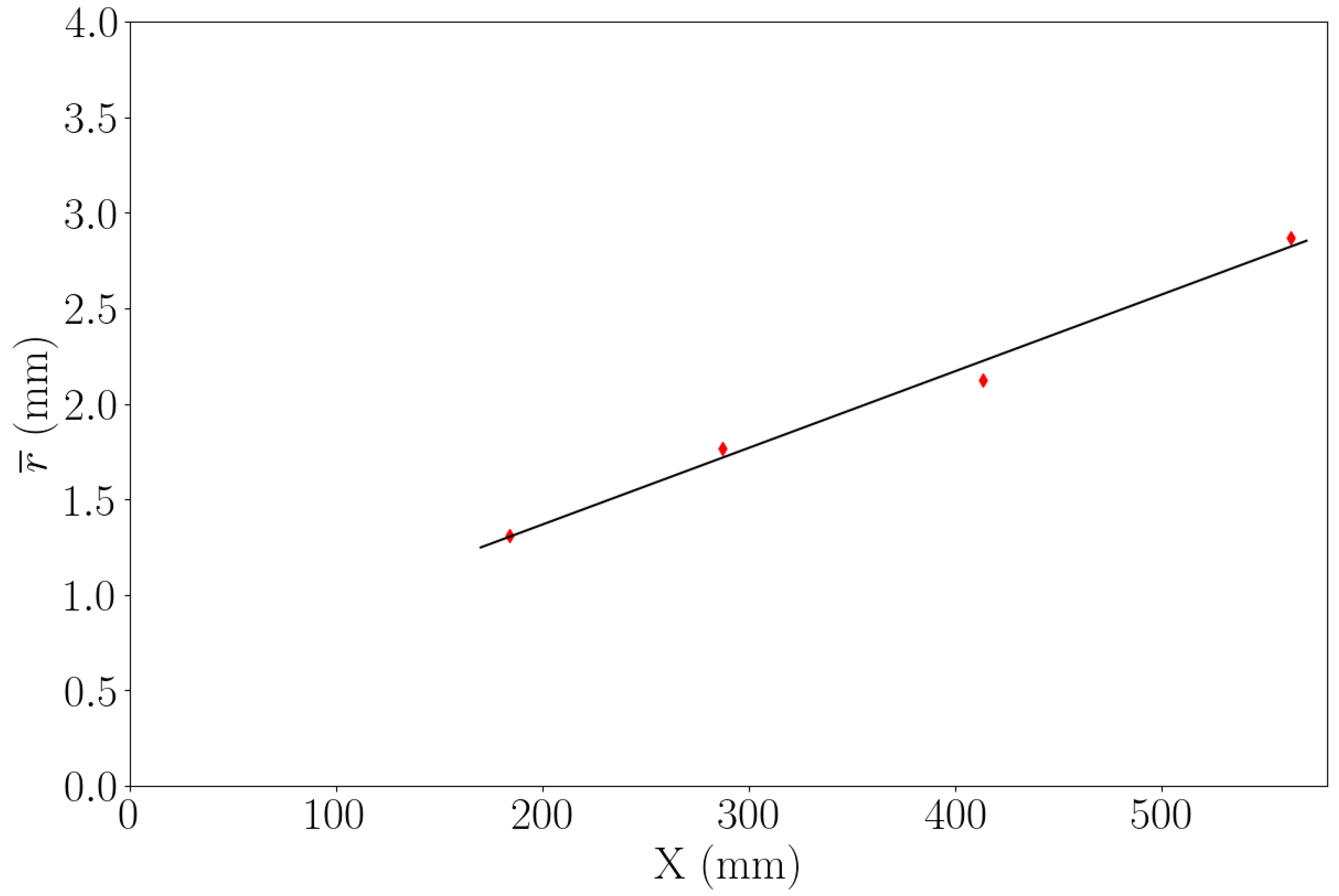
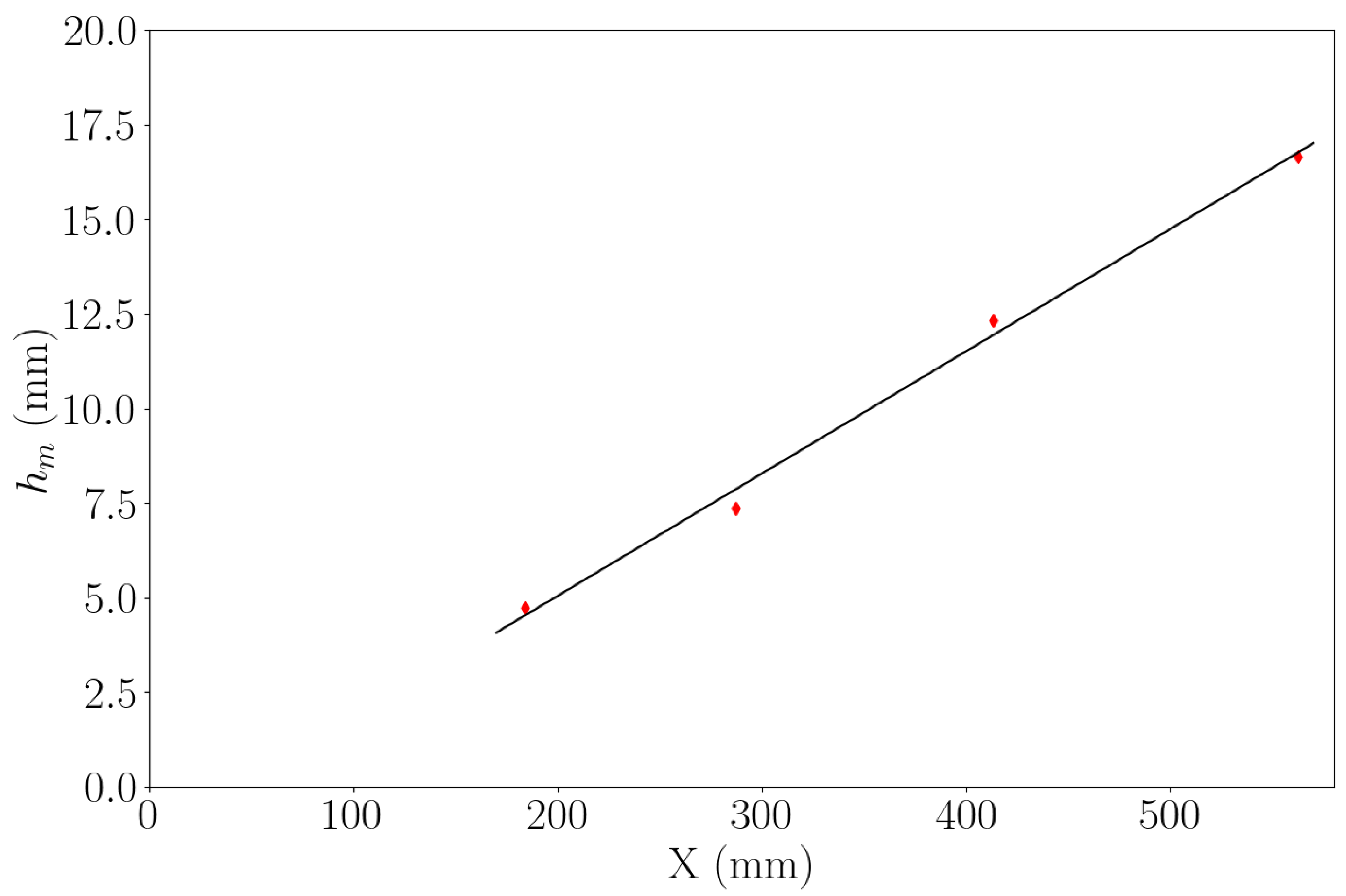
The mean bubble radius,
, and the separation height between adjacent bubbles undergoing a merger,
, grow on a quadratic time scale [
45], in common with
. These growth rates are related by the model, with
and
being their respective growth rate parameters. We determine these three growth rates for the numerically simulated experiment. The extraction and analysis of these data, including relevant plots, are presented in
Section 10.
The bubble merger model correctly predicts the measured merger rates relative to experimental data. The model has one adjustable parameter, which is a noise level (fluctuation or variance) in the bubble radii. A brief overview of the merger model and all relevant equations is given in
Section 11.
On a quantitative level, we revisit predictions made by the merger model and reported in [
45]. We find that for the Smeeton and Youngs (SY) experiments [
46], the merger model better predicts growth rate
than originally reported. Applications of this model to numerical simulation data are also presented; see
Section 12. We comment that
is sensitive to the amplitude of long wavelength random (noise) perturbations to the initial data, as was observed in the experiments of Meusche, Andrews and Schilling [
47,
48,
49] and the LEM experiments of Dimonte [
50] whose long-wavelength noise in the experiment apparatus made its use for comparison to simulations difficult. The bubble merger model studied here excludes such initial perturbations, which appear to be missing in the SY experimental data [
46] and are missing in the simulation data studied here.
We recall that the fluids are accelerated; this is customarily achieved by a rapid downward acceleration of a gravitationally stable two-fluid system, with the light fluid above the heavy. These turbulent events accelerating the bubble penetration occur at the base of the bubble, or even above the base, in the form of a vortex ring wrapping around the stem above the downward moving bubble. According to this picture, we see the origin of the randomness as lying in the fluids at the base of the bubble, or even above it, and coming from turbulent aspects of the mixing flow, a well-known source of randomness. In fact, in our data, we observe that the merger occurs in stages, starting at the base and progressing downwards to the tip. Not explored here, but likely, is the fact that the merger begins earlier, at the level of vortex rings driving the bubble.
We mention an alternate bubble merger model [
37] which predicts one observed parameter (
) on the basis of one input parameter: a noise level in the initial data that is assumed to originate in the initial perturbations of the initial interface. This model mispredicts the bubble radius and velocity for non-interacting bubbles. The misprediction is significant as its velocity contains a term proportional to its radius. The bubble merger model proposed by Cheng et al. [
45] yields a range of predictions for the bubble height-to-width ratio that is consistent with the values observed in experiment and simulation. However, as noted in [
51], the model [
52,
53] predicts a value for this ratio that falls outside the observed range.
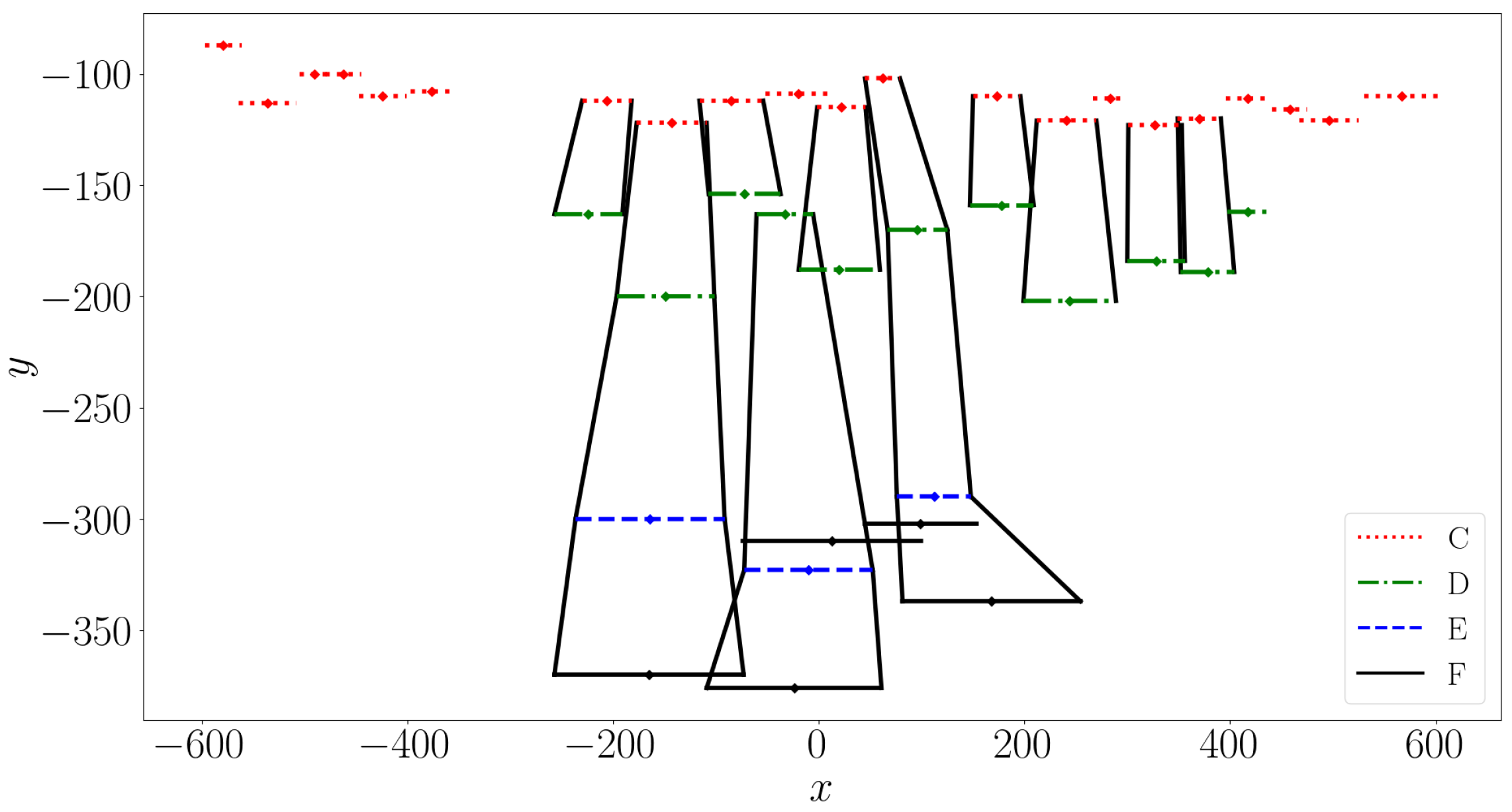
8. 2D Bubble Merger
Five experiments of SY are analyzed (numbered 99, 103, 104, 105, and 114). Plates A-F in each experiment reflect six subsequent times in the evolution of the mixing front. The elapsed time between plates varies by experiment and are shown in
Table 1. These experiments are presented as photographs taken from face on cameras, so the resulting data are essentially two-dimensional. The acceleration is tangential to the
y-axis in these experiments. The data show a few of the bubbles surviving until the final plate, while many smaller bubbles, present initially, are left behind and disappear from the mixing front and from the plots as time evolves. As the fronts are moving downward in time, the later bubbles are below the earlier ones. We show the larger of the observed bubbles at each time frame. The edges of the same bubble, observed at successive times, are joined to provide a picture of the continuous evolution of each major bubble.
Analysis is omitted for Plates A and B across all experiments due to the low resolution and small amplitudes of bubbles. Plate C is also omitted for Experiments 99 and 103 for identical reasons. Plate photographs are scaled using tank dimensions from SY and center-line values from [
54].
To minimize the possibility of interpretation errors in assigning heights and widths to each bubble, both values are independently measured for all bubbles in the ensemble by two authors. Leading bubbles are defined as bubbles with the furthest penetration and with sufficiently large radii. Two authors independently identify the leading bubbles of each plate.
We construct a merger path for a qualitative analysis of the bubble merger using bubble positions and widths. Construction of merger paths begins with the terminal leading bubbles of each experiment and continues working backwards in time to identify its predecessor(s).
Figure 17,
Figure 18,
Figure 19,
Figure 20 and
Figure 21 present bubble merger trees, which contain the leading bubbles of each plate along with their adjacent neighbors. For all bubbles in the ensemble, including those not involved in a merger, we represent their widths by a horizontal line. Coloring and line styles are used to identify a bubble’s plate of origin. One can observe the merger process, where a given bubble grows systematically by expanding into space vacated by smaller bubbles. We quantify this observation in
Table 2a.
9. 3D Bubble Merger
We construct the three-dimensional analogue of the merger trees found in
Section 8. The 3D nature of the data introduces additional difficulties in its analysis and presentation. We examine simulation data modeling the miscible and compressible SY [
46], Experiment 112. This experiment involves sodium iodide solution (
g/cm
) and a solution consisting of water, hydrochloric acid, and phenolphthalein (
g/cm
), with an approximate Atwood number of 0.3. The mean acceleration is
, where
m/s
. The domain in this simulation has dimensions 3.75 cm × 0.625 cm × 15 cm, with periodic boundaries in the
x-
y plane, and it has no edge effects. The spatial mesh has spacing
, and the numbers of grid cells are
,
, and
. The initial conditions contain short-wavelength perturbations and the equation of state for this simulation is a gamma law gas. We thank Tulin Kaman for providing the simulation data used in this study. For details on a related simulation study of Experiment 112, see [
55].
Simulations are analyzed at four time steps (40, 50, 60, and 70 ms), each corresponding to one of the Plates C–F from Experiment 112 of SY [
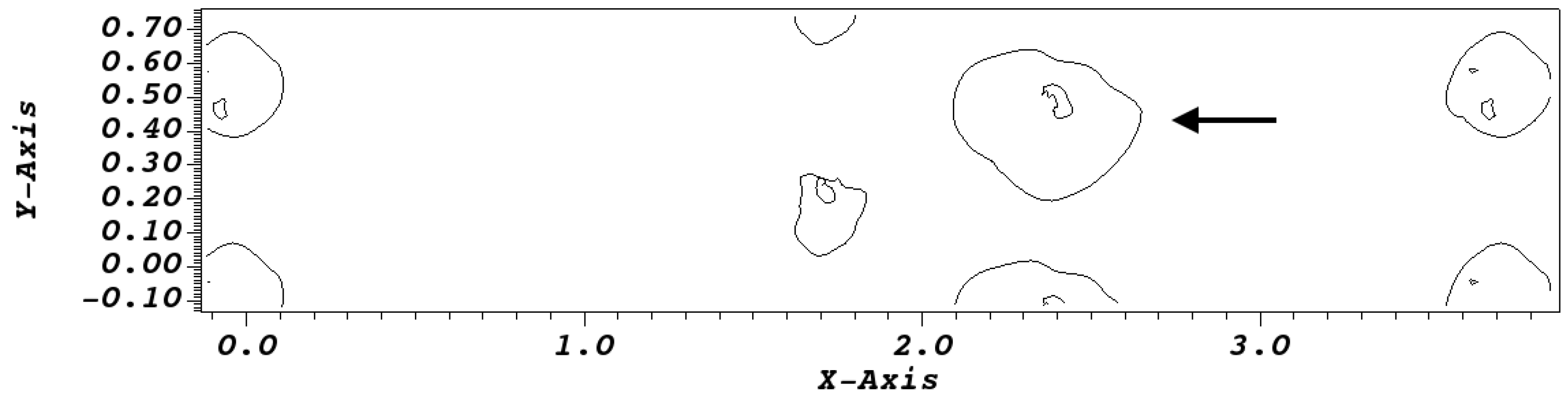
46]. Data from these simulations consist of a meshed interface modeling the mixing front and discrete state variables, namely density. Unlike the 2D case of the preceding section, we note greater ambiguity in identifying bubbles of light fluid in the mixing front. We define a bubble as a structure of reasonable shape that grows from a distinct tip. An example is shown in
Figure 22. We observe that in this example, the bubble structure contains a filament of heavy fluid within its enclosure, which we ignore in subsequent analyses.
At a fixed time step, we identify distinct bubble tips and record each bubble’s height at three distinct levels. The lowest height is the bubble tip, above this is a larger cross-section at the middle of the downward moving bubble, and above that is a rim that forms the upper limit of the bubble within the fluid. A bubble’s terminal rim is defined as the largest of the bubble’s heights at which its cross-section has a consistent and maximum shape. The data analysis consists of examination of cross-sections at different height (z) levels through the simulation data.
Following data collection and bubble identification, we construct a merger path for each terminal bubble. That is, for each terminal bubble, we determine what bubble(s) must have preceded it in earlier time steps. The resulting five merger paths are presented in
Table 3; here,
p is used to denote a bubble split periodically in that respective coordinate. We note in particular Bubble 5 of
Table 3, which originates from two distinct tips but terminates at a common base, and so the merger must have occurred at a height beyond the tip.
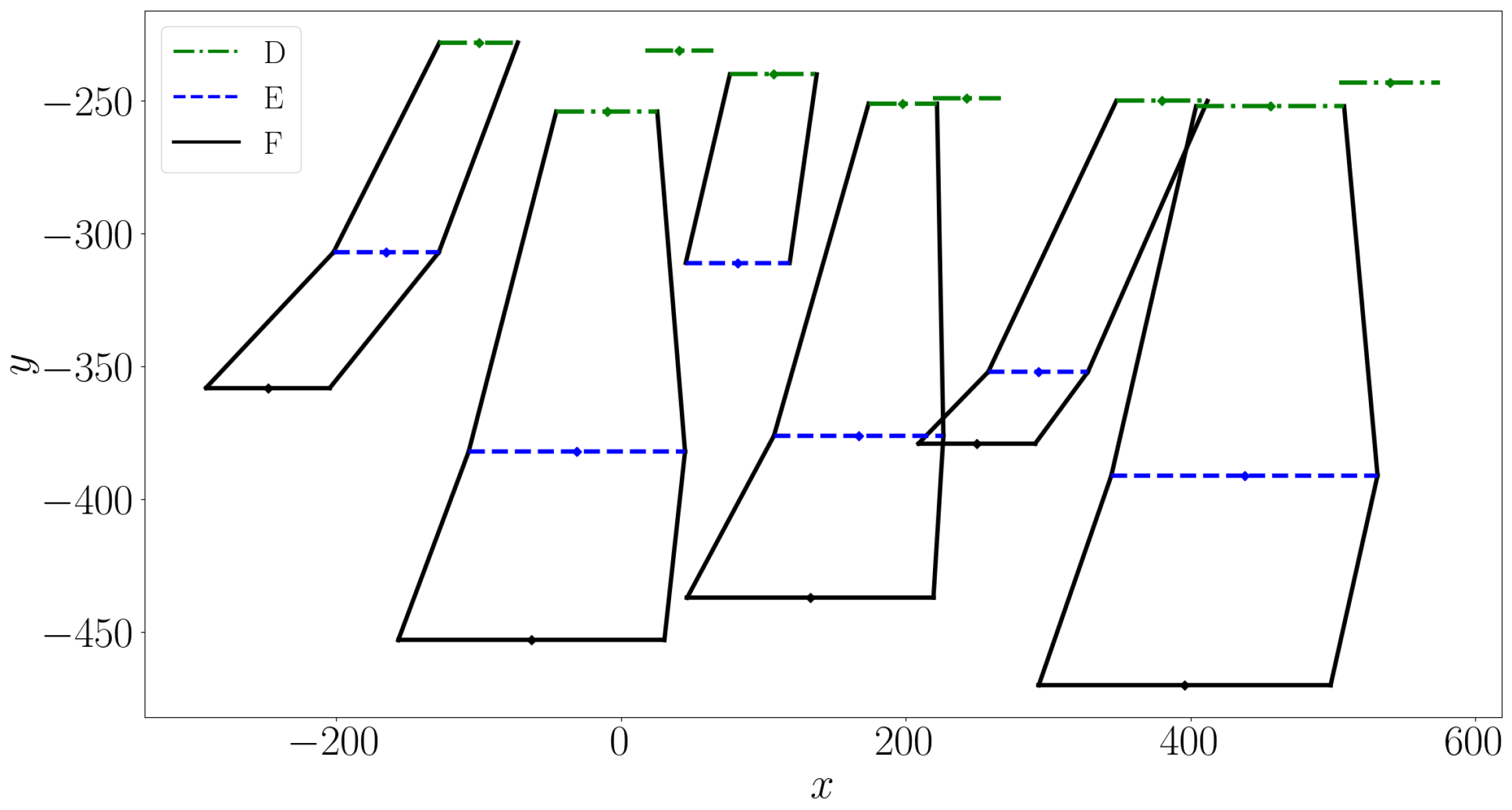
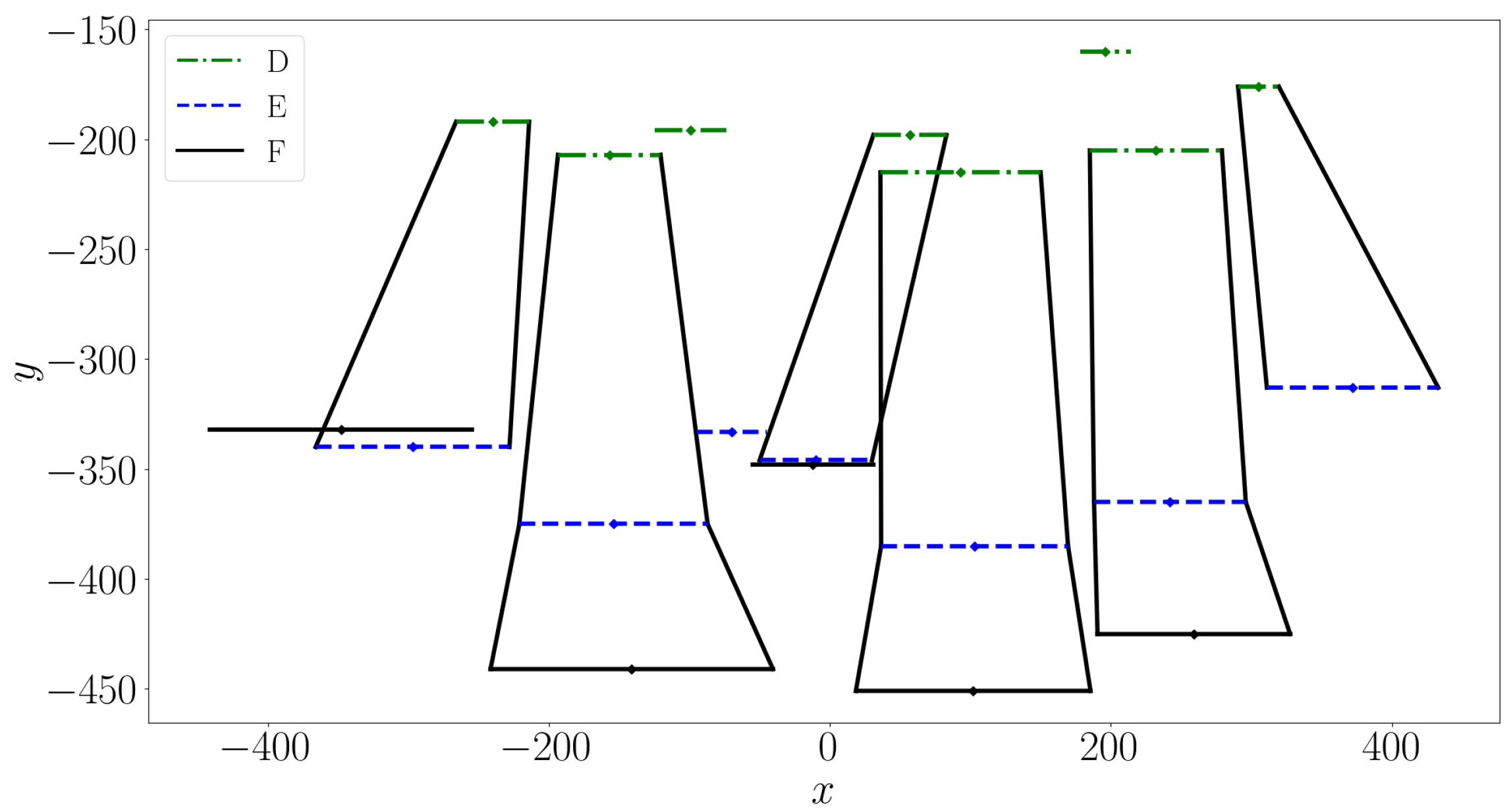
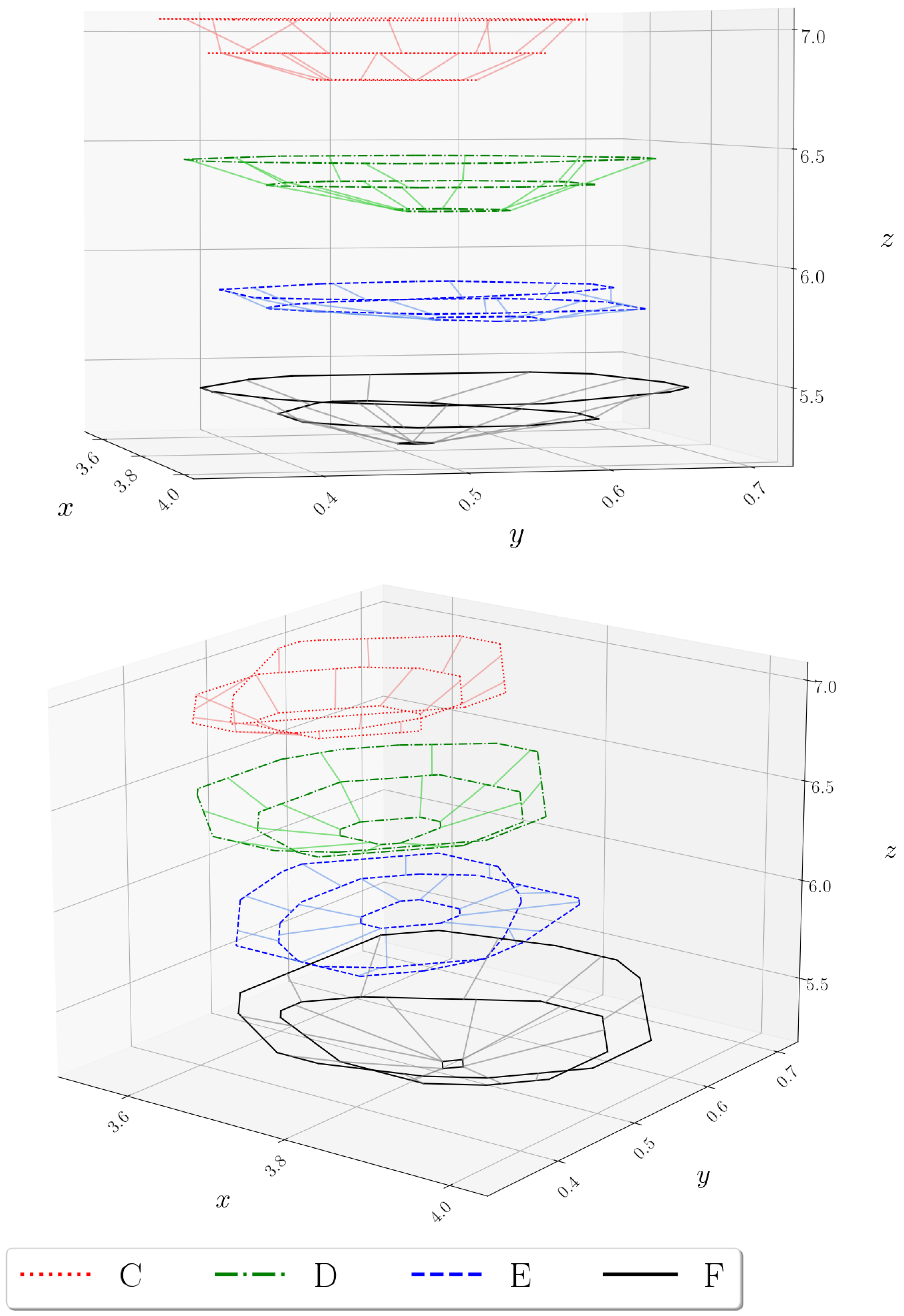
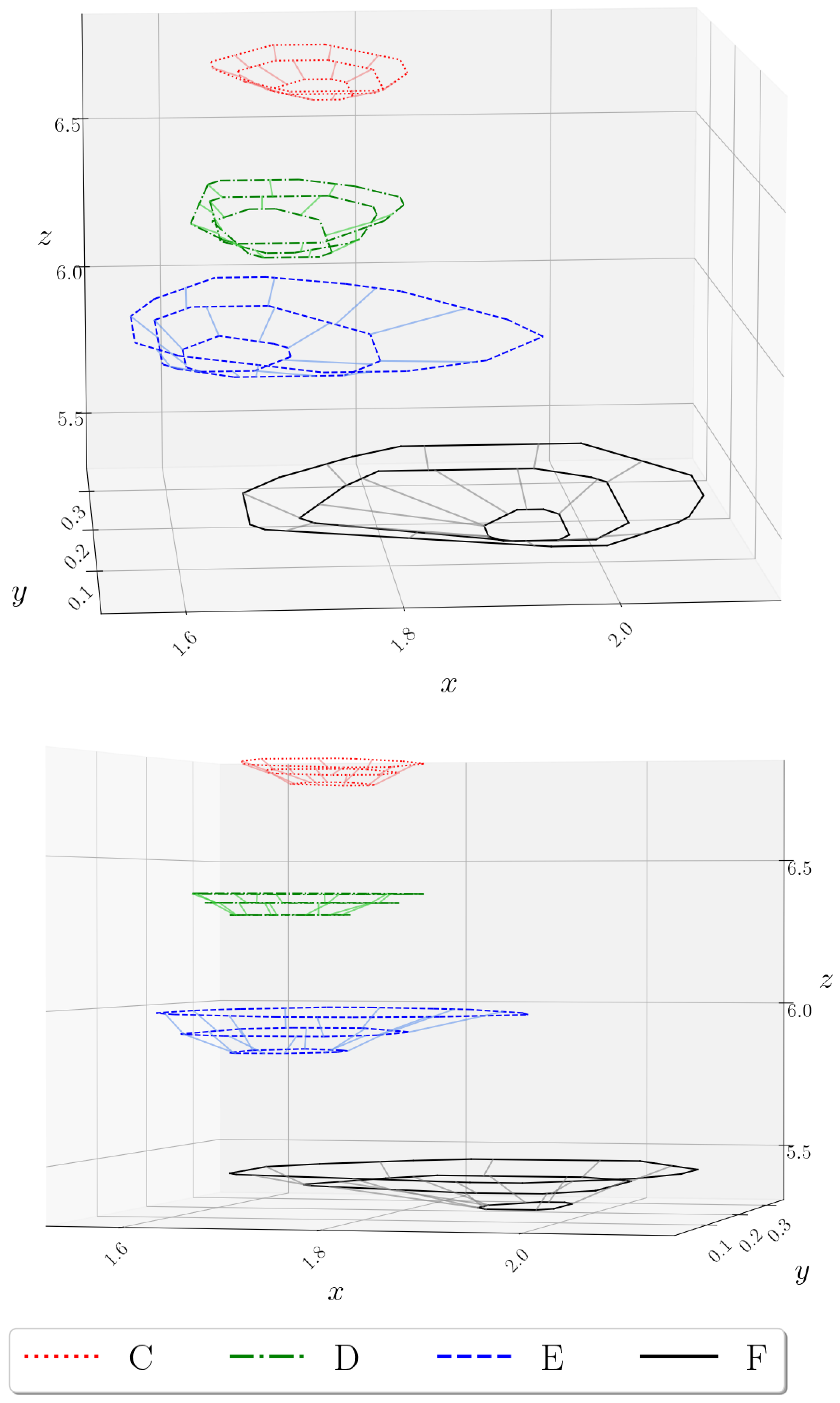
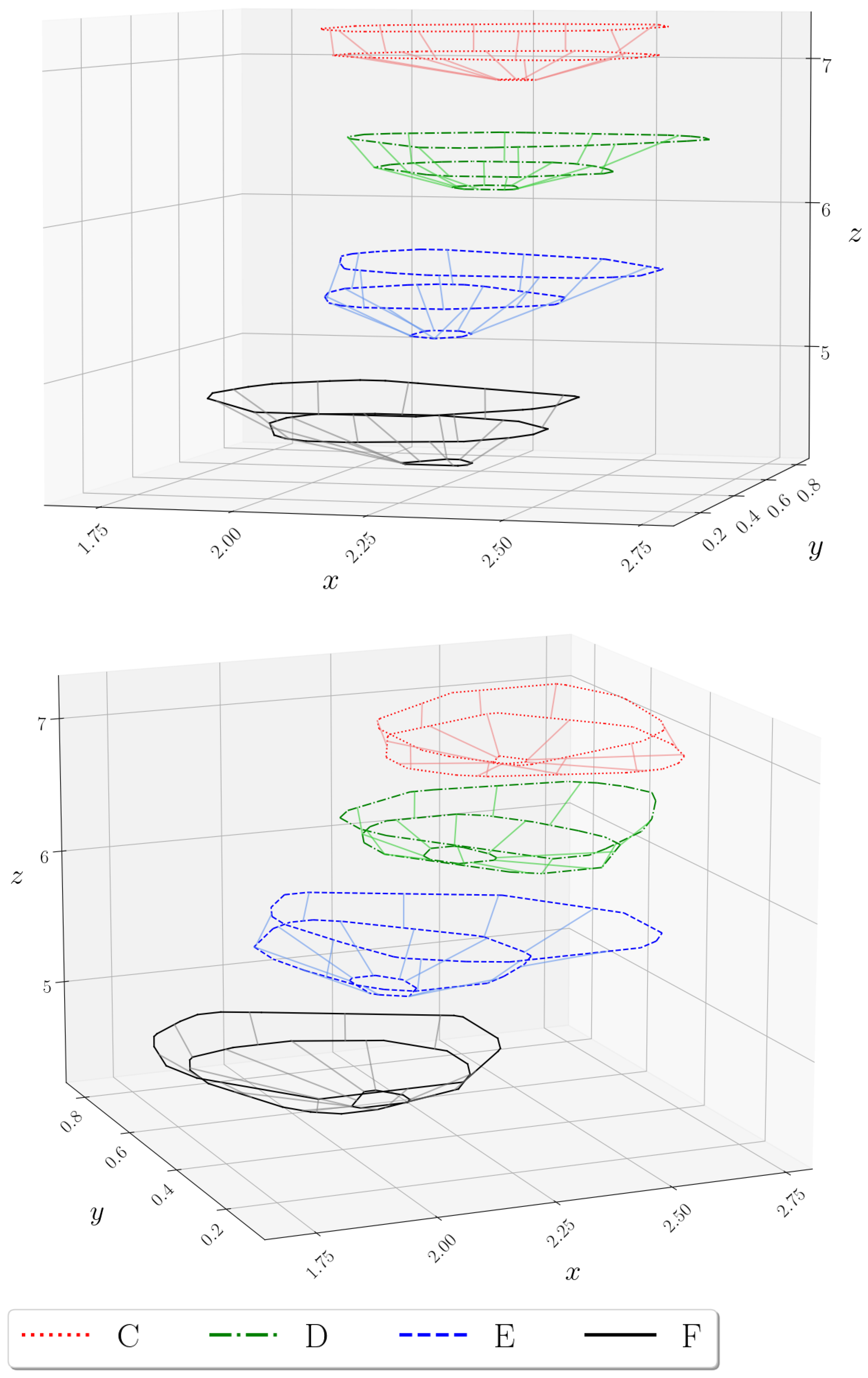
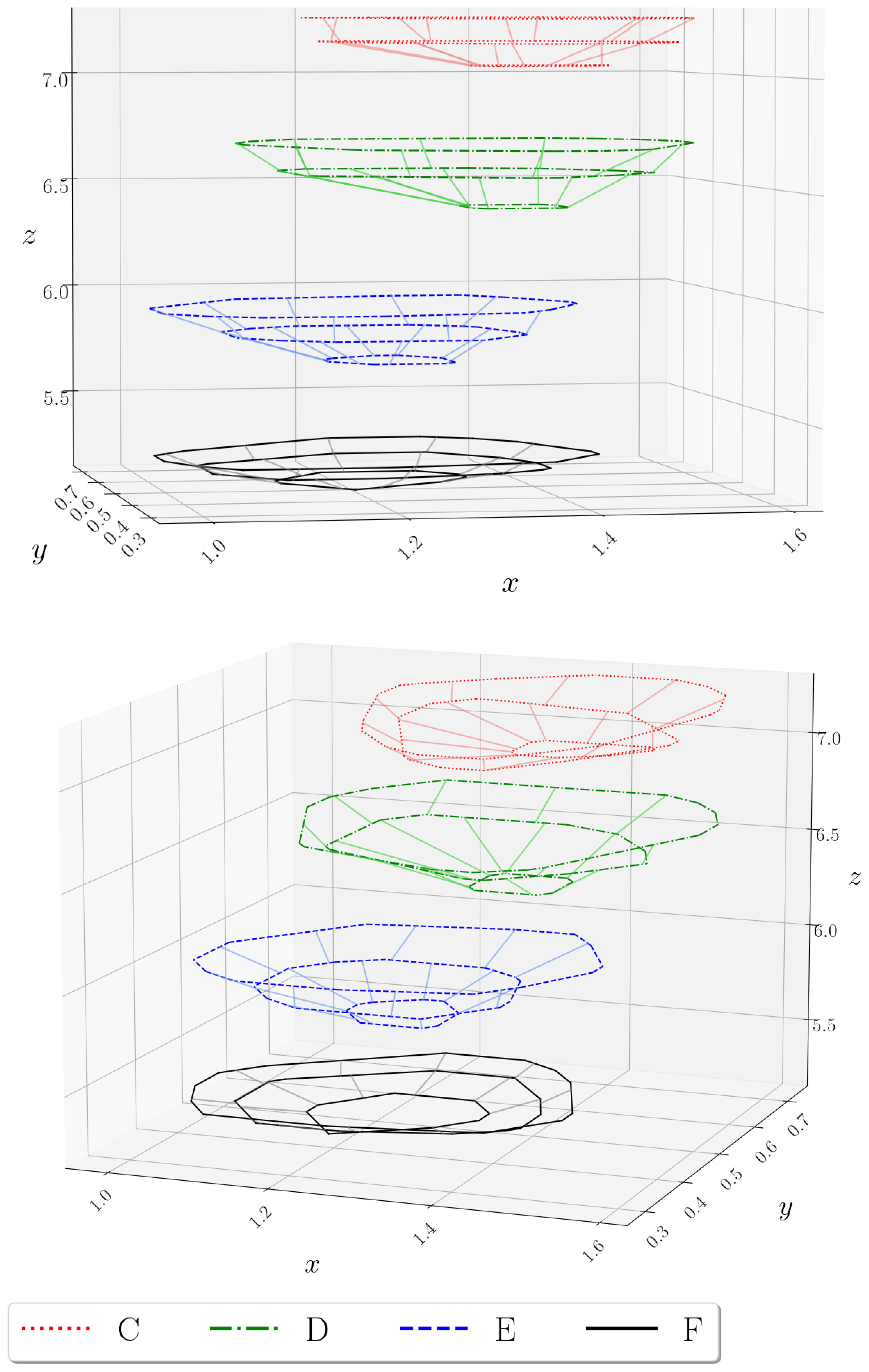
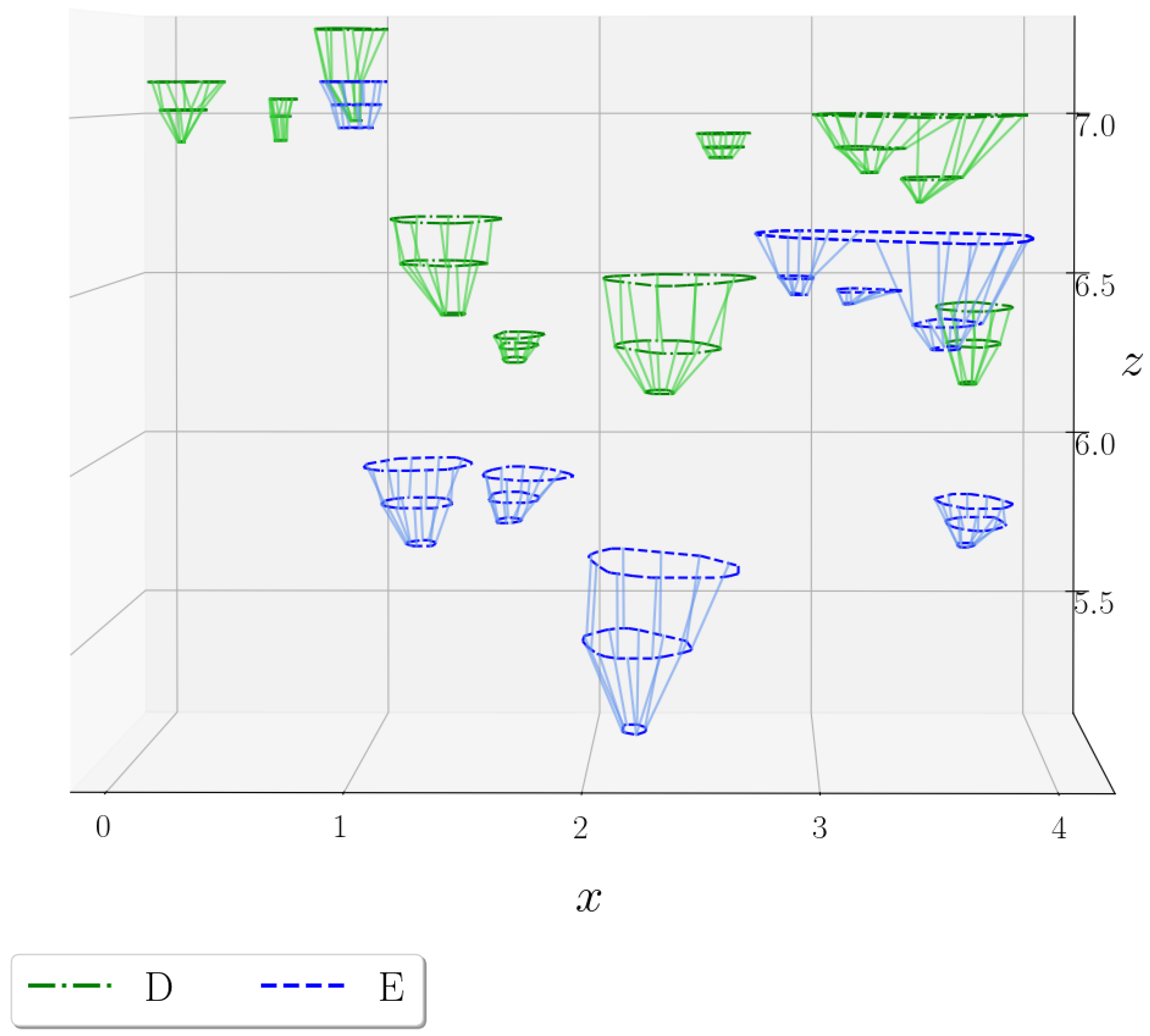
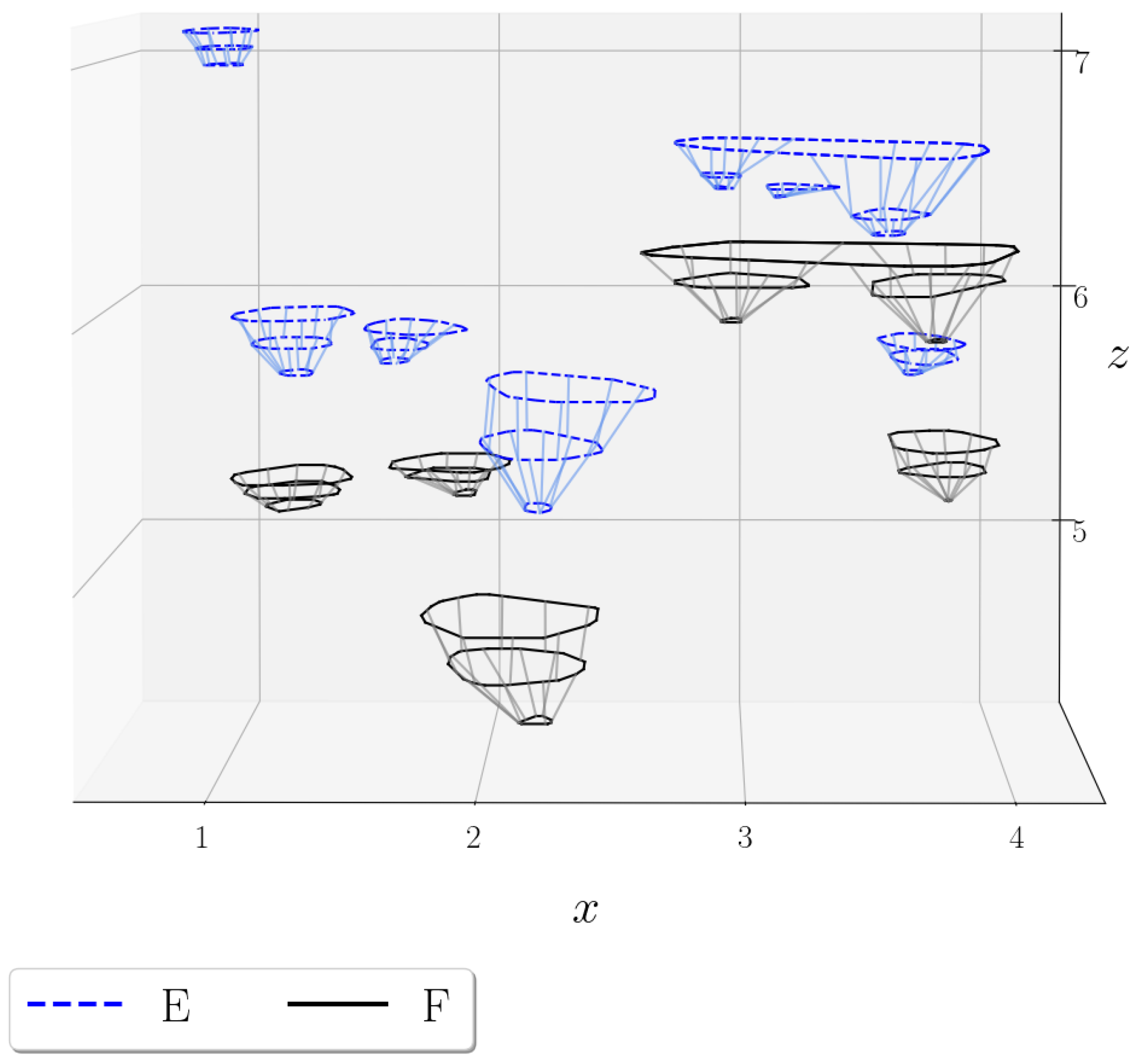
We now outline the process of constructing the 3D merger trees. For a given bubble, we first extract three 2D subsets from the 3D simulation data, one for each of the heights of interest previously discussed. Each slice is digitized, converting all density values to binary values, with each grid block taking a value of zero if it contains density values closer to that of the lighter fluid, and one for values closer to the heavier fluid. A marching squares algorithm, a two-dimensional analogue of the marching cubes algorithm, is then used to identify the vertices of each bubble’s contour. We filter out the non-leading bubbles that do not have the potential to participate as a leading bubble at any time step, using bubble centers to identify the leading bubbles and then take their convex hull. The remaining non-leading bubbles are analyzed separately. Bubbles split by the periodic boundary are reconstructed using appropriate coordinate shifts. Contours are then plotted to create 3D merger trees. Each terminal bubble, and thus each merger tree, is plotted separately. Each bubble is shown at three heights, from the tip to the middle to its base. To suggest time evolution, the bases at the different times are joined by a few nearly vertical line segments. Time evolution is coded by color and line style, consistent with the 2D figures shown in
Section 8, with red corresponding to Plate C, green for Plate D, blue for Plate E, and black for Plate F. See
Figure 23,
Figure 24,
Figure 25,
Figure 26 and
Figure 27, with two alternate viewing angles in most cases.
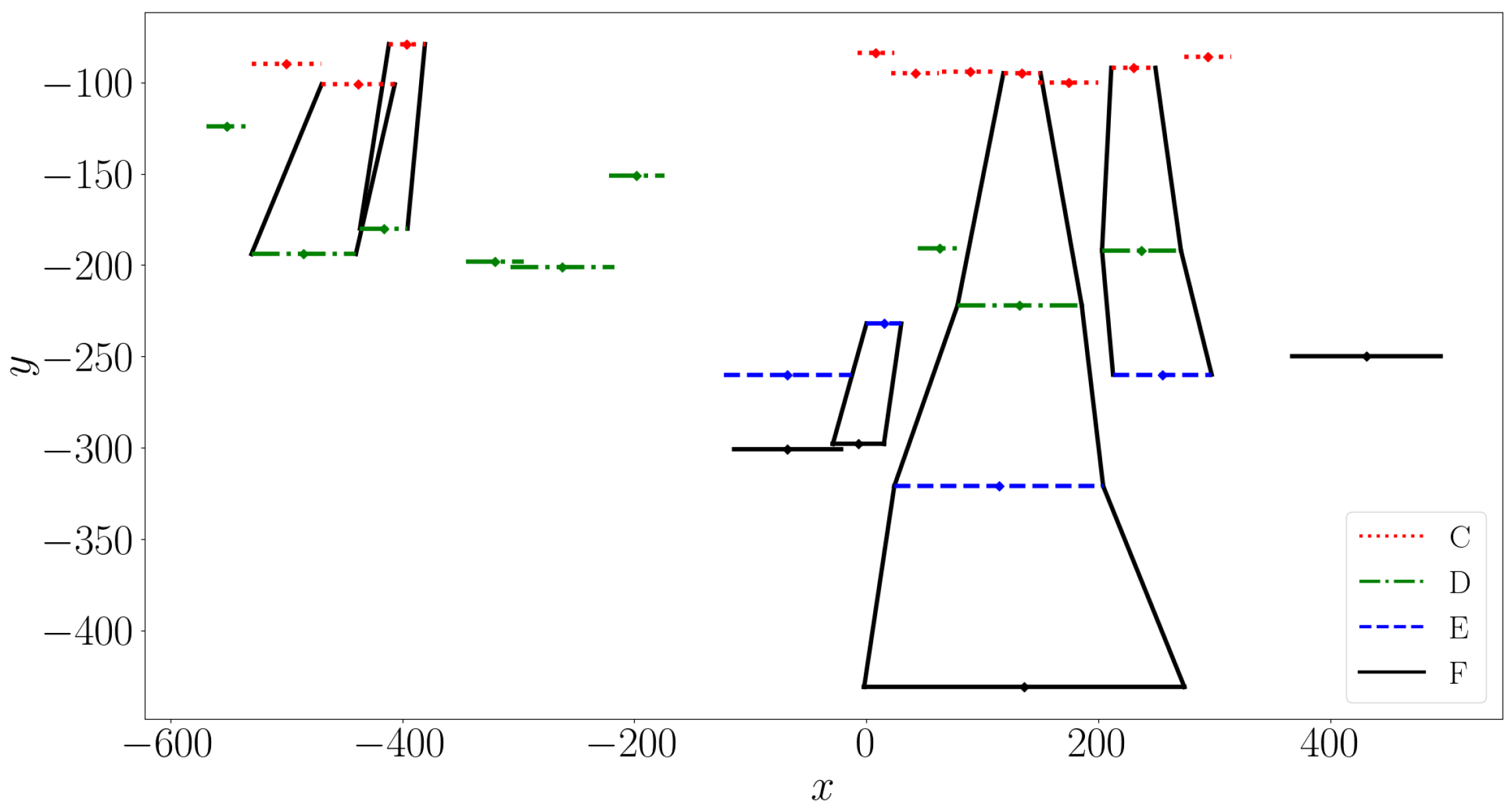
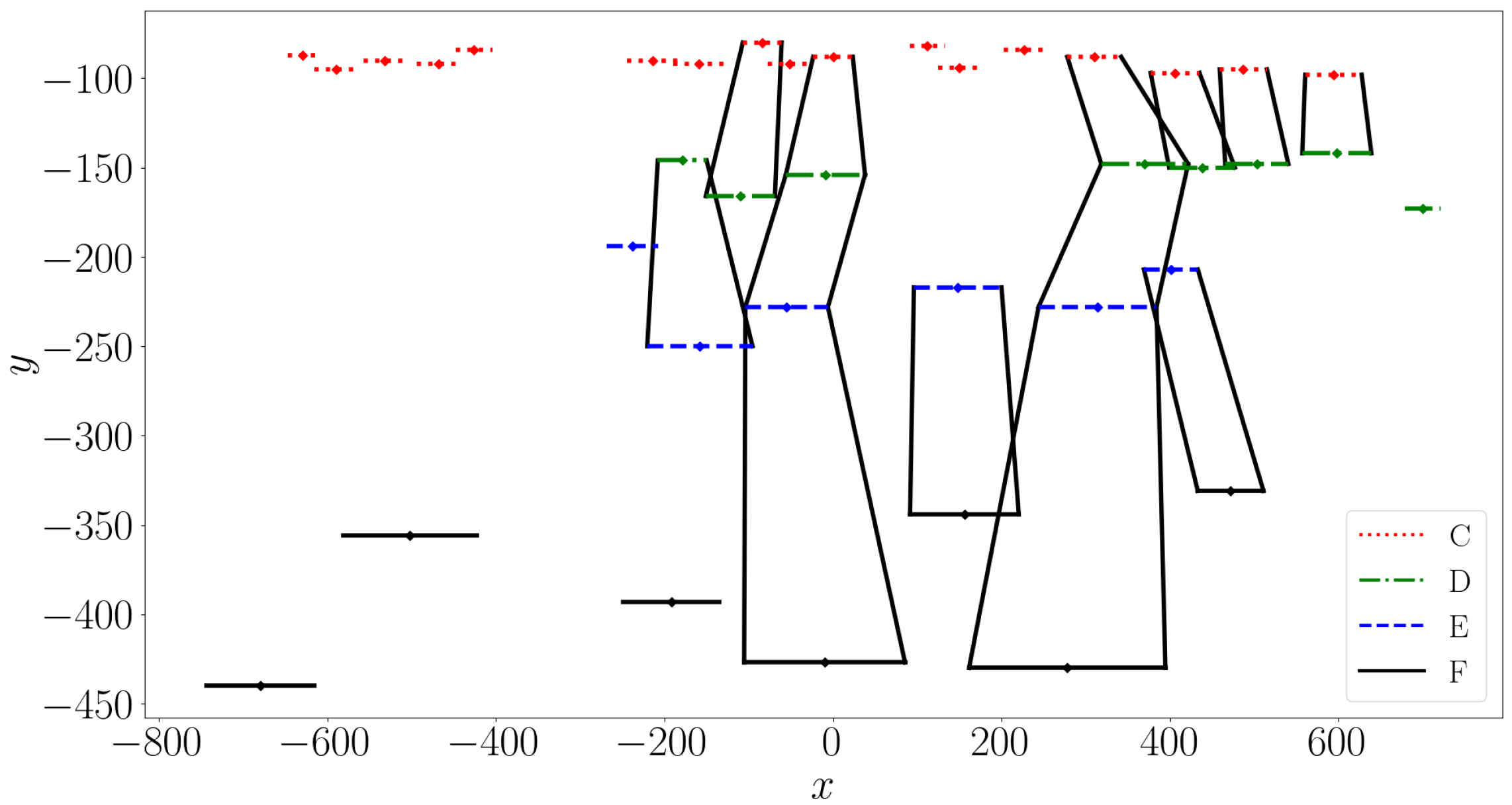
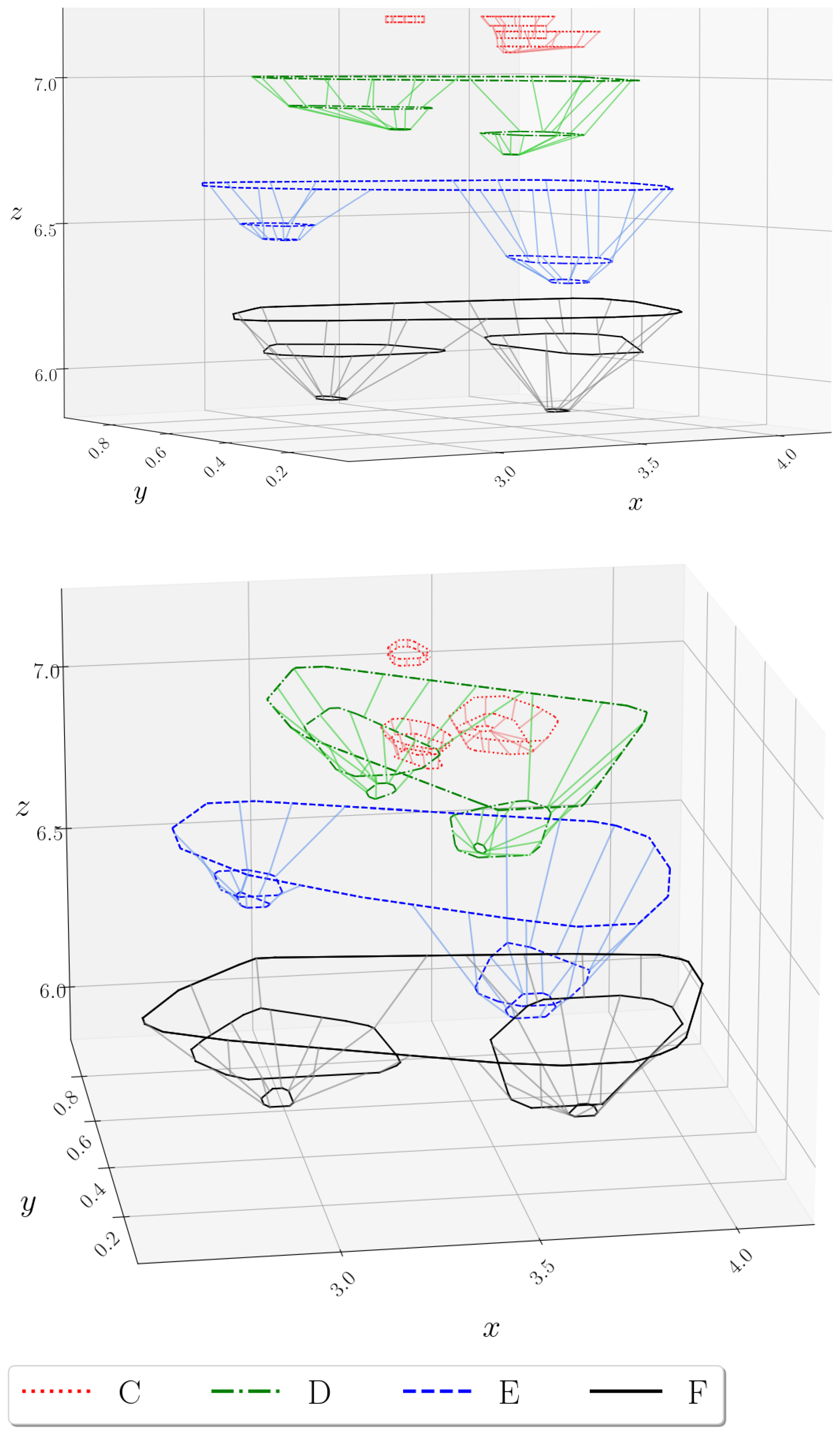
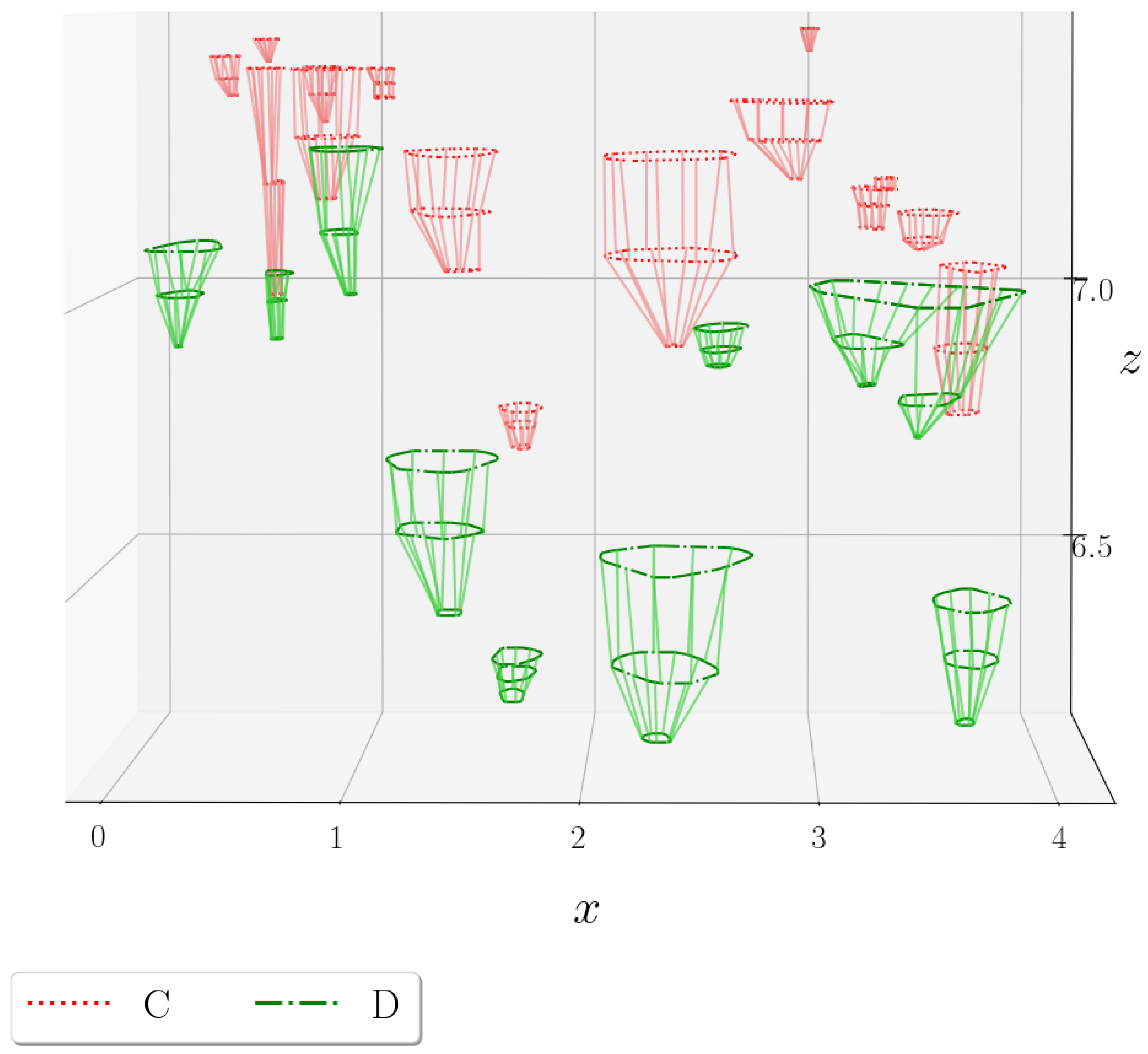
We recall the picture behind the bubble merger model, which states that the larger bubbles expand by occupying space vacated by smaller bubbles that were swept aside. This process can be observed in
Figure 28,
Figure 29 and
Figure 30, where all bubbles in the ensemble, including smaller (non-leading) bubbles, are shown. As in
Figure 23,
Figure 24,
Figure 25,
Figure 26 and
Figure 27, the time evolution of each bubble is shown using nearly vertical lines connecting three of its cross-sections: the bubble tip, an intermediate height, and the bubble rim. The leading bubbles can be seen expanding with time, and non-leading bubbles are swept aside and ultimately vanish from the mixing front. We quantify these phenomena, both for the 2D and 3D cases, in
Table 2b.
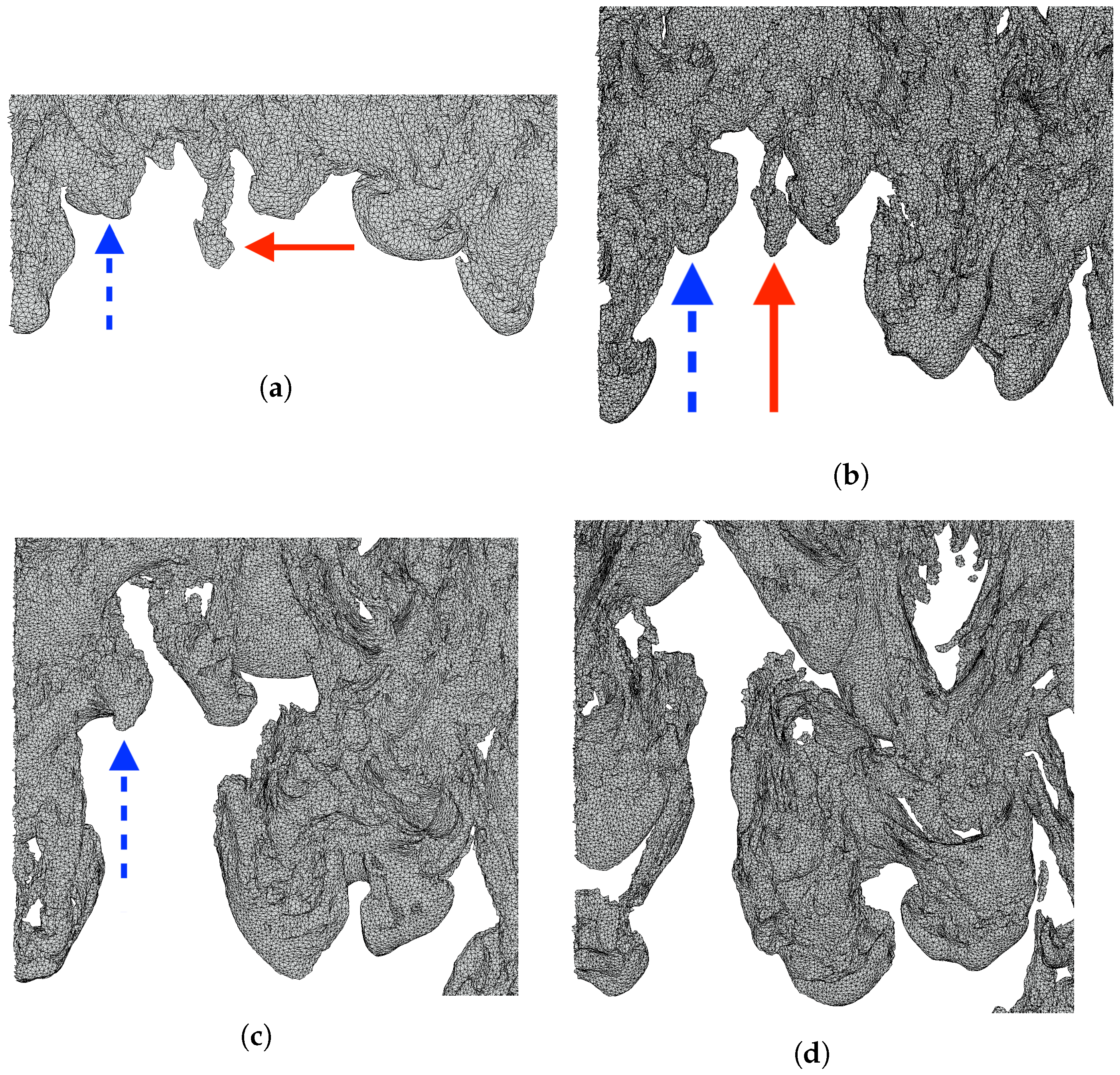
Another example of the bubble merger process can be found in
Figure 31. This example follows a fixed region of the mixing front as time evolves. The images in these figures are taken directly from the numerical simulation’s meshed interface data and visualized using the VisIt visualization software. In particular, we point out two smaller, less advanced bubbles, which are indicated by a solid red and dashed blue arrows, respectively. The first bubble survives until Plate D, whereas the second survives until Plate E. By Plate F, we observe that both bubbles have vanished, while the nearby leading bubbles have grown in size and have penetrated further into the heavy fluid.
11. Review of Merger Model
Here, we present a brief overview of the model and model equations; we refer the reader to [
45] for details. The merger model predicts three measured parameters:
- 1.
the mixing rate, ,
- 2.
the bubble height separation at the time of merger, ,
- 3.
the mean bubble radius, ,
and
takes in a noise level as an adjustable input.
This noise level, as presented in the original merger model, is taken to be the variance of the fluctuations amongst bubble radii. More explicitly, for fixed time, the randomness within the bubble ensemble can be measured by first applying map
), where
r is the bubble radius, and computing the variance of the transformed distribution. Area preservation and geometrical arguments concerning bubble merger lead to defining parameter
where
and
is the standard deviation of fluctuations amongst bubble radii. After some elementary manipulations, Equation (
25) can be rewritten to be independent of
:
We recall that
and
satisfy self-similar scaling laws:
and
where
, and
is the averaged merger rate evaluated at the renormalization group fixed point.
Using the above, the model predicts
as
where
is a constant obtained from experiment or from theoretical determination. In all subsequent analyses, we follow [
45] and take
for hexagonal bubbles.
Thus, given a measure of randomness, a prediction for
using Equation (
29) reduces to determining
and
. To this end, we consider two interacting adjacent bubbles with radii
and
. We let
and
. We note that ratio
is then itself a measure of randomness. When using experimental data, this value can be computed directly from the standard deviation of bubble radii using
The velocity of a single bubble, when used in conjunction with geometric considerations of interacting bubble tips on a larger length scale, provides a criterion for completion of merger:
where
and
is the first zero of the Bessel function,
.
We observe that solving Equation (
31) for
and using Equation (
33), along with the fact that
, yields
, as desired.
The model determines
by using the already found value for
:
where
Having determined the averaged merger rate at the RNG fixed point, we may use Equations (
27)–(
29) to predict theoretically the growth rates,
,
, and
.
12. Application of Model to Experiment
We use the process outlined in
Section 11 to predict model parameters. We begin first by applying the model to various radius ratios
and reproduce Table III of [
45] keeping all notation consistent; the results are shown in
Table 7. We then apply the model to Experiments 104, 105, and 114 of SY, and compare the results with those reported in [
45]. We present these predictions in
Table 8. For consistency, we use the measured standard deviation reported in [
45] as an input into the model.
Minor discrepancies in the numerical solution for nonlinear Equation (
31) are corrected, as well as the modifications to the experimental predictions.
prediction improves in comparison to the experiment, while predictions for
and
become somewhat worse. These changes are made with the acceptance of the authors of [
45].
Additionally, we apply the model to the 3D numerical simulation modeling Experiment 112 of SY that is discussed in
Section 9 and
Section 10. We measure the radius at the base of each bubble in the ensemble and measure the fluctuations within the resulting distribution as was discussed in
Section 11, similar to the 2D analysis carried out in [
45]. Due to the 3D nature of the simulation, the cross-sections at the base are not perfectly circular and so we note some ambiguity in interpreting its radius. We map these standard deviations to radius ratios using Equation (
30) as input to the model. The results can be found in the last row of
Table 8.
We recall from
Section 10.1 that we cannot confirm that the sharp interface in the numerical simulations is relevant to SY’s Experiment 112 [
46]. Furthermore, the unavailability of data from earlier time steps renders our application of the merger model to simulation incomplete. We posit that this exclusion has an influence on the predicted value for
. For these reasons, we do not compare the merger model prediction to the
value measured in either experiment or simulation.








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}