
Mapping the Tilt and Torsion Angles for a 3-SPS-U Parallel Mechanism



Abstract
:1. Introduction
2. Architecture of the Parallel Mechanism
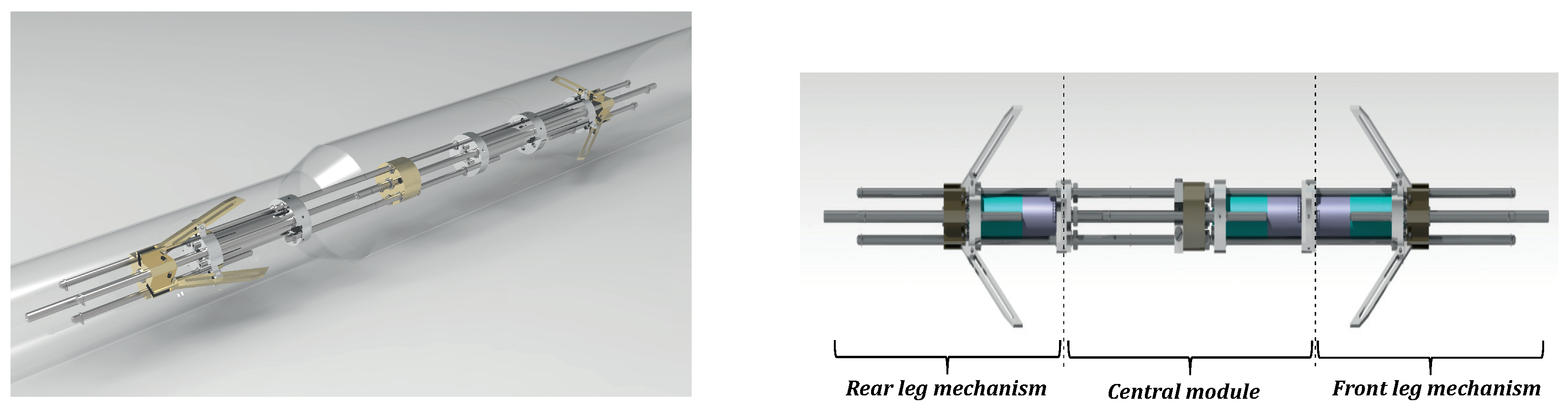
2.1. A Flexible Mechanism for a Piping Inspection Robot
2.2. Geometrical Equations of the Mechanism
3. Singularity Analysis and Workspace of the Mechanism in the T&T Space
3.1. Singularity Equations of the Mechanism
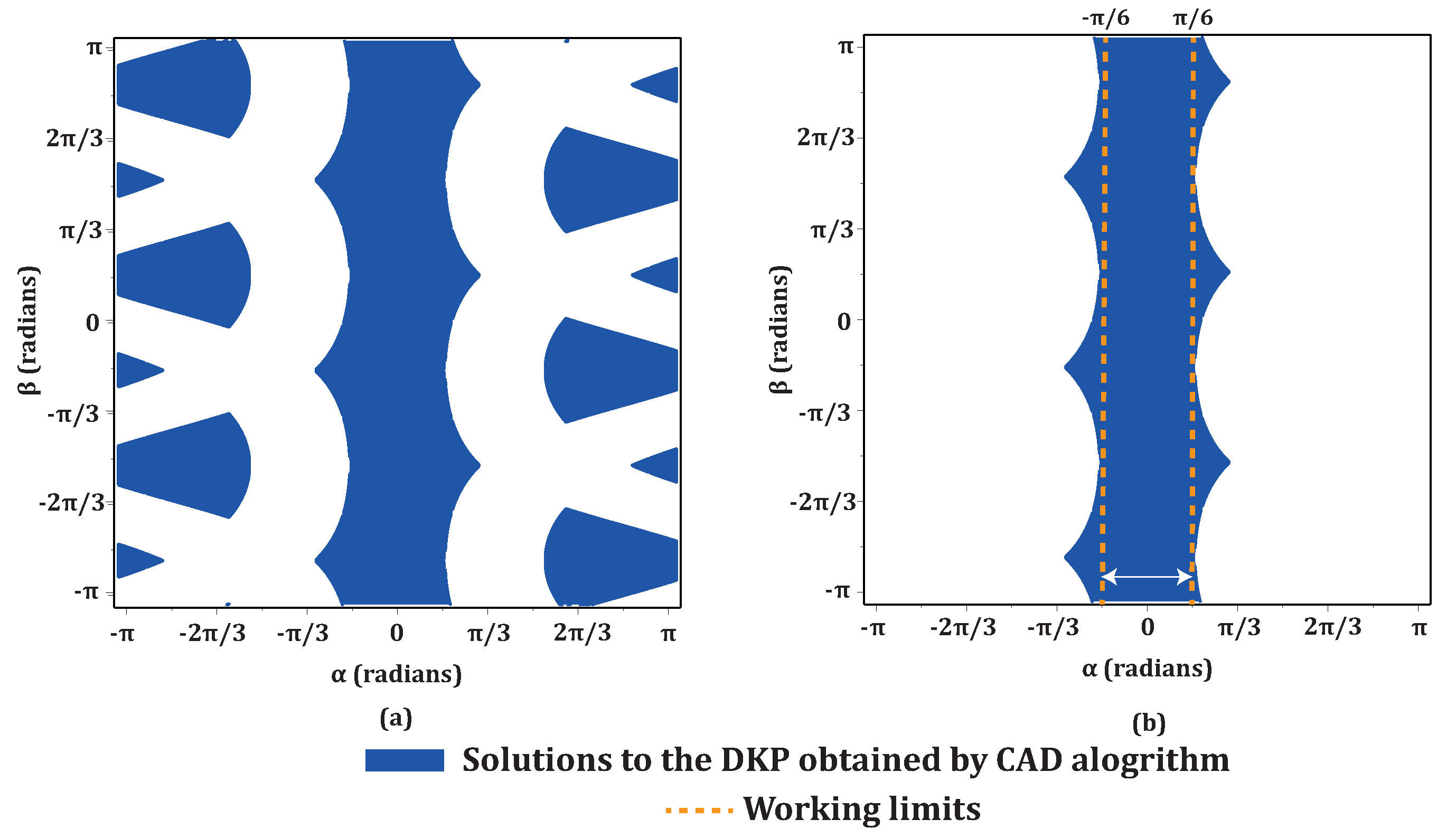
3.2. Results of Singularity Analysis Using the CAD Algorithm
- is an open connected subset of the workspace
- for all pose values in , the direct (resp. inverse) kinematics problem has a constant number of solutions
- is maximal in the sense if is contained in a set , then does not satisfy the first or second condition.
- Computation of a subset of the workspace (resp. joint space) where the number of solutions changes: the
- Description of the complementary of the discriminant variety in connected cells: the
- Connecting the cells that belong to the same connected component of the complementary of the discriminant variety:
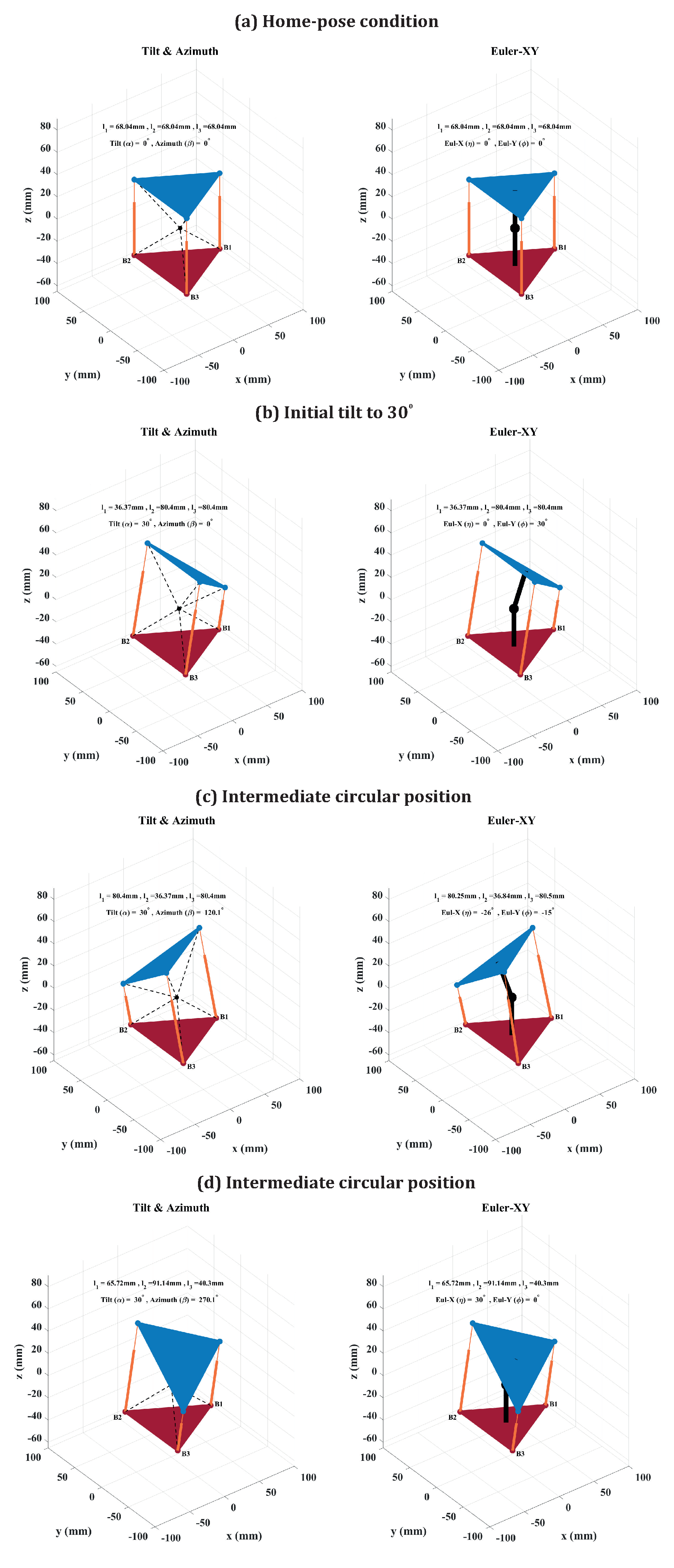
4. Mapping the T&T Angles to the Euler Angles
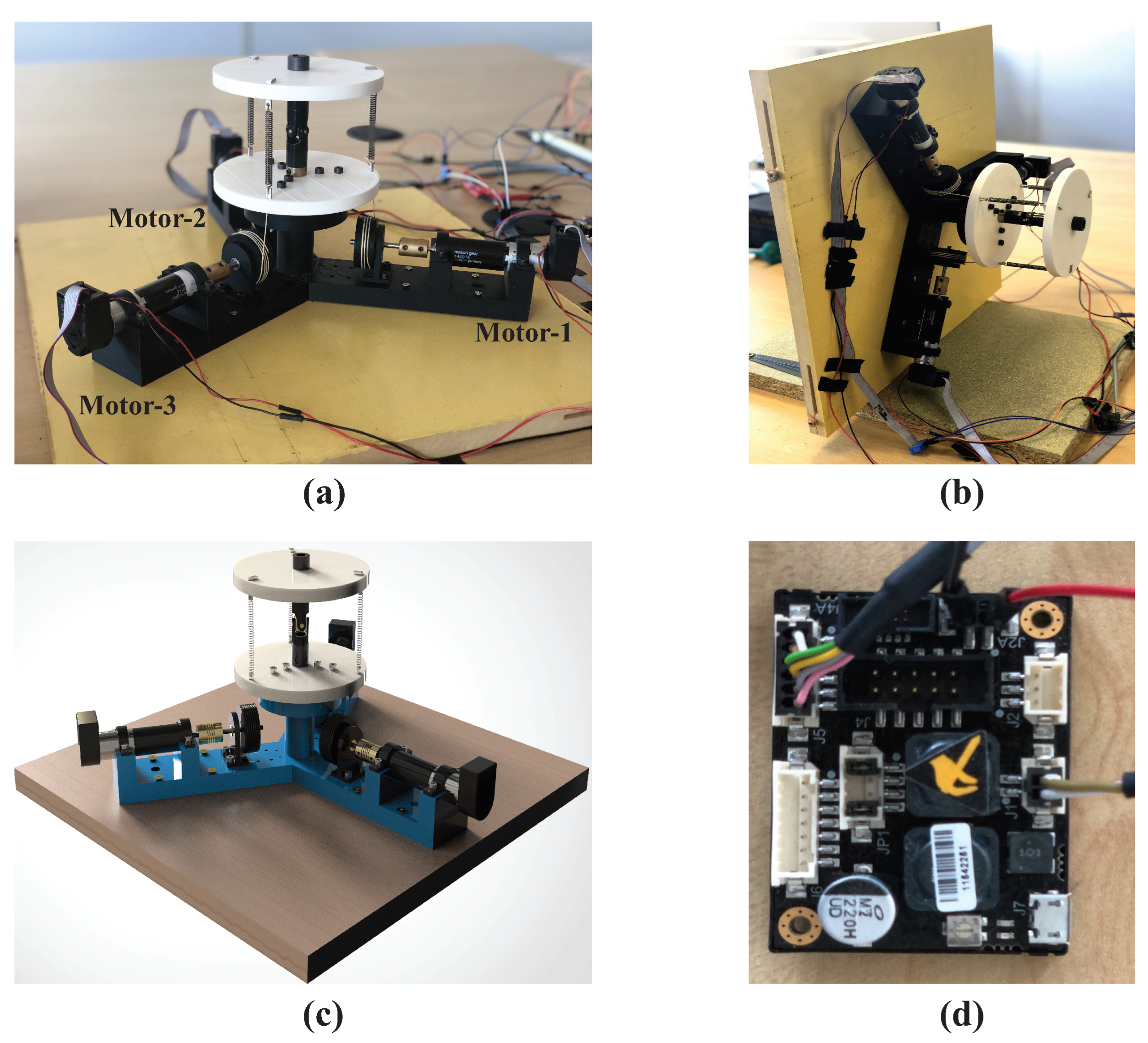
5. Experimental Validation
5.1. Trajectory Generation
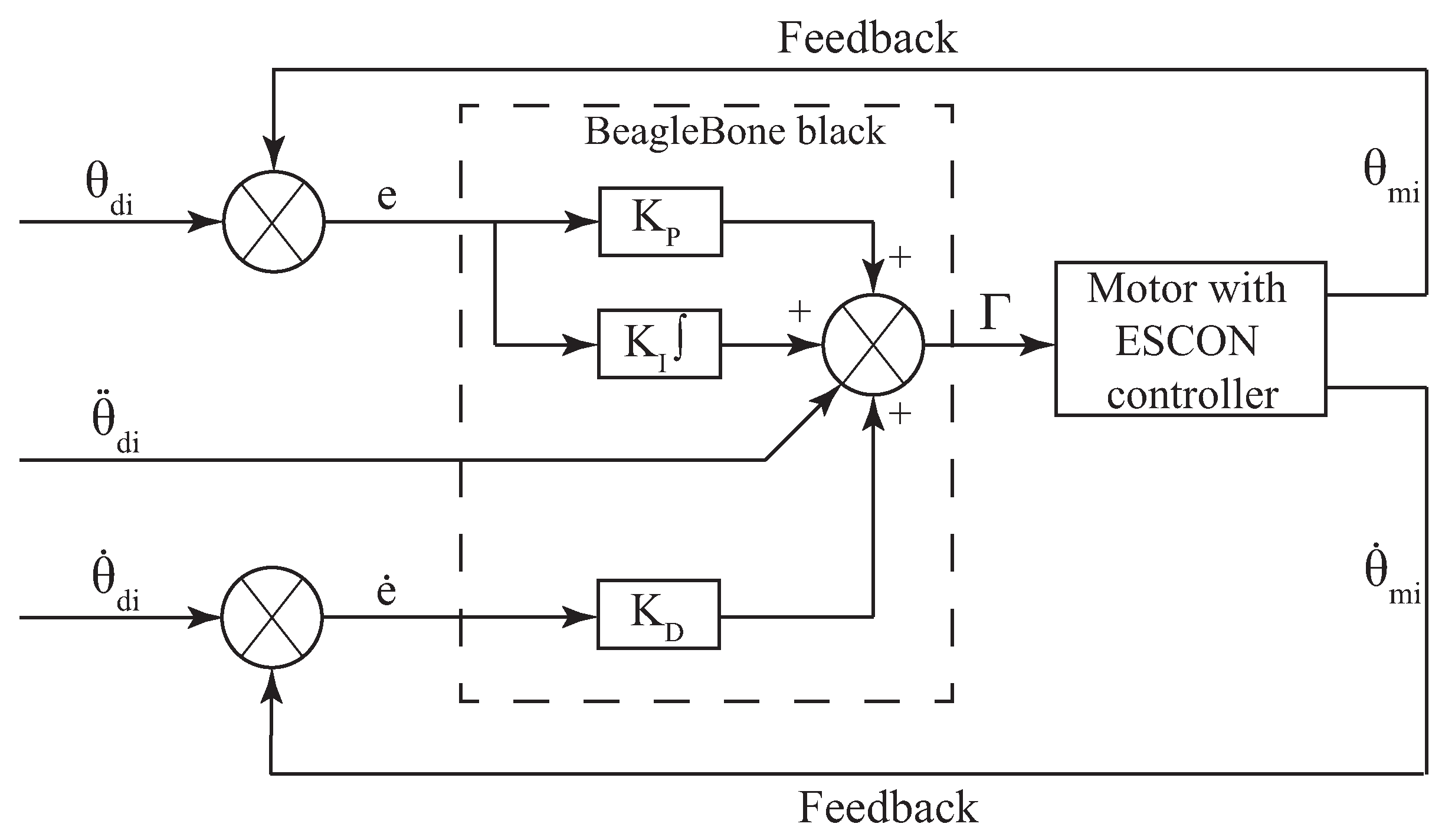
5.2. PID Control Law
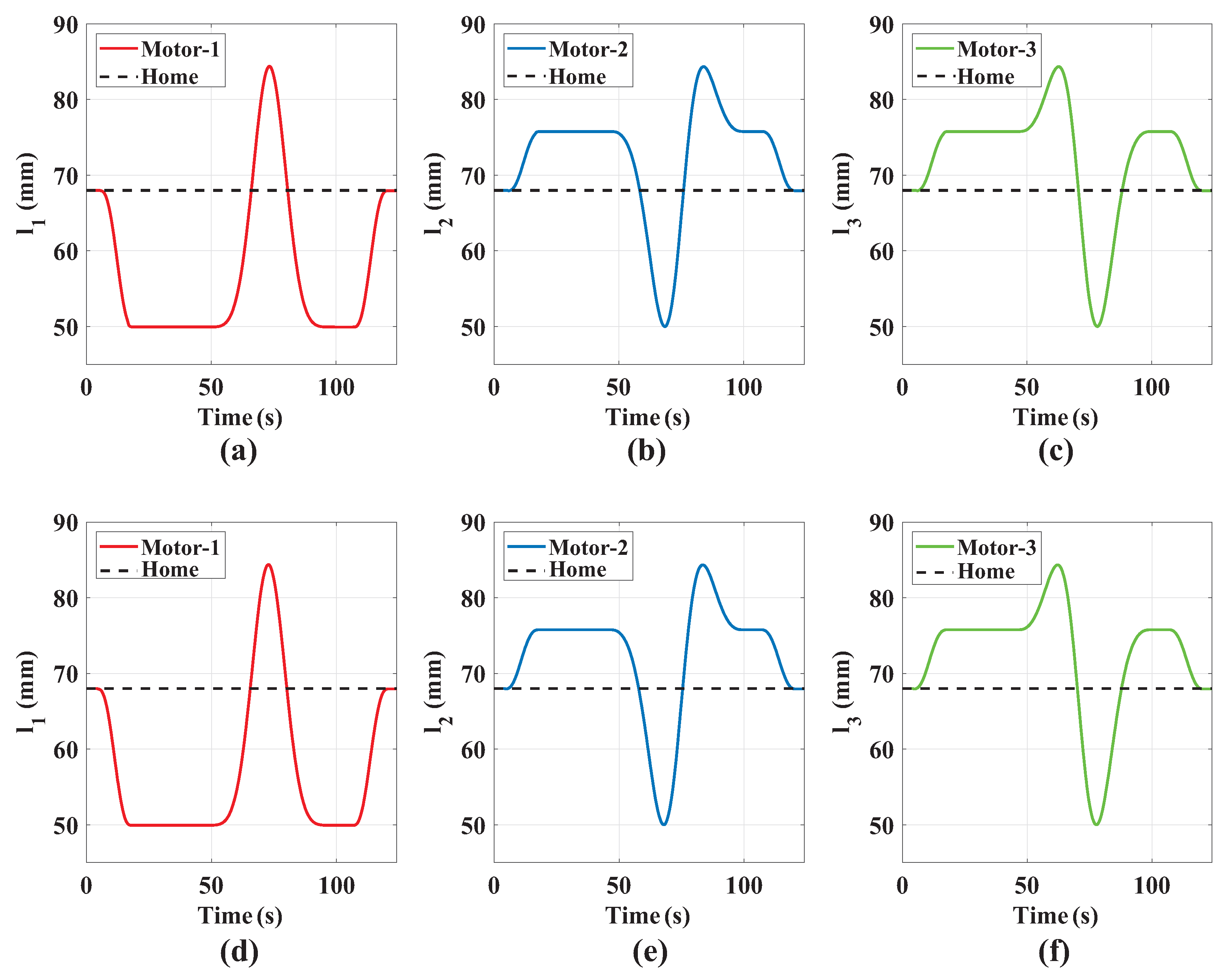
5.3. Results of Experiments
6. Discussion and Perspectives
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PKM | Parallel Kinematic Mechanism |
| T&T | Tilt and Torsion |
| IKP | Inverse Kinematics Problem |
| DKP | Direct Kinematics Problem |
| BB Black | BeagleBone Black |
Nomenclature
| Vector coordinates for base | |
| Vector coordinates of mobile platform | |
| Distance of spring mounting point in mm | |
| h | Design constant of the mechanism (no unit) |
| Tilt and Azimuth transformation matrix | |
| Length of th prismatic spring | |
| Tilt angle in T&T space | |
| Azimuth angle in T&T space | |
| Direct kinematics matrix | |
| Inverse kinematics matrix | |
| Determinant value of the direct kinematics matrix | |
| Euler angle transformation matrix | |
| tilt/rotation angles in the Euler space | |
| Desired and measured angular positions in rad | |
| Desired and measured angular velocities in rad/s | |
| Desired angular acceleration in rad/s | |
| Pulsation in rad/s |
References
- Merlet, J.P. Parallel Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006; Volume 128. [Google Scholar]
- Pritschow, G. Parallel kinematic machines (PKM)–limitations and new solutions. CIRP Ann. 2000, 49, 275–280. [Google Scholar] [CrossRef]
- Bonev, I.A.; Zlatanov, D.; Gosselin, C.M. Advantages of the modified Euler angles in the design and control of PKMs. In Proceedings of the 2002 Parallel Kinematic Machines International Conference, Chemnitz, Germany, 23–25 April 2002; pp. 171–188. [Google Scholar]
- Bonev, I.A. Geometric Analysis of Parallel Mechanisms; Université Laval: Quebec City, QC, Canada, 2002. [Google Scholar]
- Bonev, I.A.; Ryu, J. Orientation workspace analysis of 6-DOF parallel manipulators. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 12–16 September 1999; American Society of Mechanical Engineers: New York City, NY, USA, 1999; Volume 19715, pp. 281–288. [Google Scholar]
- Briot, S.; Bonev, I.A. Singularity analysis of zero-torsion parallel mechanisms. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1952–1957. [Google Scholar]
- Tao, Z.; An, Q. Interference analysis and workspace optimization of 3-RRR spherical parallel mechanism. Mech. Mach. Theory 2013, 69, 62–72. [Google Scholar] [CrossRef]
- Caro, S.; Chablat, D.; Lemoine, P.; Wenger, P. Kinematic analysis and trajectory planning of the Orthoglide 5-axis. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015; American Society of Mechanical Engineers: New York City, NY, USA, 2015; Volume 57144, p. V05CT08A004. [Google Scholar]
- Yang, G.; Teo, T.J.; Chen, I.M.; Lin, W. Analysis and design of a 3-DOF flexure-based zero-torsion parallel manipulator for nano-alignment applications. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2751–2756. [Google Scholar]
- Venkateswaran, S.; Chablat, D.; Boyer, F. Numerical and experimental validation of the prototype of a bio-inspired piping inspection robot. Robotics 2019, 8, 32. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhang, M.; Sun, H.; Jia, Q. Design and motion analysis of a flexible squirm pipe robot. In Proceedings of the 2010 International Conference on Intelligent System Design and Engineering Application, Changsha, China, 13–14 October 2010; IEEE: Piscataway, NJ, USA, 2010; Volume 1, pp. 527–531. [Google Scholar]
- Kwon, Y.S.; Lim, H.; Jung, E.J.; Yi, B.J. Design and motion planning of a two-moduled indoor pipeline inspection robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 3998–4004. [Google Scholar]
- Ryew, S.; Baik, S.H.; Ryu, S.W.; Jung, K.M.; Roh, S.G.; Choi, H.R. In-pipe inspection robot system with active steering mechanism. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No. 00CH37113), Takamatsu, Japan, 31 October 2000–5 November 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 3, pp. 1652–1657. [Google Scholar]
- Venkateswaran, S.; Chablat, D. A new inspection robot for pipelines with bends and junctions. In Advances in Mechanism and Machine Science, Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science, Krakow, Poland, 30 June–4 July 2019; Springer International Publishing: Cham, Switzerland, 2019; pp. 33–42. [Google Scholar]
- Venkateswaran, S.; Chablat, D. Singularity and Workspace Analysis of 3-SPSU and 4-SPSU Tensegrity Mechanisms. In Advances in Robot Kinematics 2020; Springer International Publishing: Cham, Switzerland, 2021; pp. 226–233. [Google Scholar]
- Venkateswaran, S.; Chablat, D.; Hamon, P. An optimal design of a flexible piping inspection robot. J. Mech. Robot. 2021, 13, 035002. [Google Scholar] [CrossRef]
- Venkateswaran, S.; Furet, M.; Chablat, D.; Wenger, P. Design and analysis of a tensegrity mechanism for a bio-inspired robot. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019; American Society of Mechanical Engineers: New York City, NY, USA, 2019; Volume 59230, p. V05AT07A026. [Google Scholar]
- Yigit, C.B.; Boyraz, P. Design and modelling of a cable-driven parallel-series hybrid variable stiffness joint mechanism for robotics. Mech. Sci. 2017, 8, 65–77. [Google Scholar] [CrossRef] [Green Version]
- Alici, G.; Shirinzadeh, B. Topology optimisation and singularity analysis of a 3-SPS parallel manipulator with a passive constraining spherical joint. Mech. Mach. Theory 2004, 39, 215–235. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. Singularity analysis of closed-loop kinematic chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
- Wenger, P.; Chablat, D. Definition sets for the direct kinematics of parallel manipulators. In Proceedings of the 1997 8th International Conference on Advanced Robotics, ICAR’97, Monterey, CA, USA, 7–9 July 1997; IEEE: Piscataway, NJ, USA, 1997; pp. 859–864. [Google Scholar]
- Chablat, D.; Wenger, P. Working modes and aspects in fully parallel manipulators. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20–20 May 1998; IEEE: Piscataway, NJ, USA, 1998; Volume 3, pp. 1964–1969. [Google Scholar]
- Jha, R.; Chablat, D.; Baron, L.; Rouillier, F.; Moroz, G. Workspace, joint space and singularities of a family of delta-like robot. Mech. Mach. Theory 2018, 127, 73–95. [Google Scholar] [CrossRef] [Green Version]
- Chablat, D.; Moroz, G.; Rouillier, F.; Wenger, P. Using Maple to analyse parallel robots. In Maple in Mathematics Education and Research, Proceedings of the Third Maple Conference, MC 2019, Waterloo, ON, Canada, 15–17 October 2019; Proceedings 3; Springer International Publishing: Cham, Switzerland, 2020; pp. 50–64. [Google Scholar]
- Venkateswaran, S.; Chablat, D. Trajectory Planning for a 3-SPS-U Tensegrity Mechanism. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual, 17–20 August 2021; American Society of Mechanical Engineers: New York City, NY, USA, 2021; Volume 85451, p. V08BT08A004. [Google Scholar]
- Chablat, D.; Moroz, G.; Wenger, P. Uniqueness domains and non singular assembly mode changing trajectories. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 3946–3951. [Google Scholar]
- Cox, D.; Little, J.; OShea, D. Ideals, Varieties, and Algorithms: An Introduction to Computational Algebraic Geometry and Commutative Algebra; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Chablat, D.; Ottaviano, E.; Moroz, G. A comparative study of 4-cable planar manipulators based on cylindrical algebraic decomposition. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011; Volume 54839, pp. 1253–1262. [Google Scholar]
- Khalil, W.; Dombre, E. Modeling Identification and Control of Robots; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Jha, R.; Chablat, D.; Rouillier, F.; Moroz, G. Influence of the trajectory planning on the accuracy of the orthoglide 5-axis. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016; American Society of Mechanical Engineers: New York City, NY, USA, 2016; Volume 50152, p. V05AT07A039. [Google Scholar]
- Maung, M.M.; Latt, M.M.; Nwe, C.M. DC motor angular position control using PID controller with friction compensation. Int. J. Sci. Res. Publ. 2018, 8, 149. [Google Scholar] [CrossRef]
- Lemoine, P. Commande d’un Moteur éLectrique à Courant Continu Mettant en Mouvement une Charge Inertielle; Technical Lab Report; Le Laboratoire des Sciences du Numérique de Nantes (LS2N): Nantes, France, 2019. [Google Scholar]
- Fasquelle, B.; Furet, M.; Khanna, P.; Chablat, D.; Chevallereau, C.; Wenger, P. A bio-inspired 3-DOF light-weight manipulator with tensegrity X-joints. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 5054–5060. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Movement Type | Tilt Space | Euler Space | ||
|---|---|---|---|---|
| (Radians) | (Radians) | (Radians) | (Radians) | |
| Initial tilt | 0 → | 0 | 0 | 0 → |
| Circular path | 0 → | |||
| Return to home | → 0 | 0 | 0 | → 0 |
| PWM Duty | Nominal Current (A) | Motor Torque (mN·m) | Motor Speed (rpm) |
|---|---|---|---|
| 10% | −0.177 | −6.05 | 3720 (Counter-clockwise) |
| 50% (idle) | 0 | 0 | 0 |
| 90% | 0.177 | 6.05 | 3720 (Clockwise) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venkateswaran, S.; Chablat, D. Mapping the Tilt and Torsion Angles for a 3-SPS-U Parallel Mechanism. Robotics 2023, 12, 50. https://doi.org/10.3390/robotics12020050
Venkateswaran S, Chablat D. Mapping the Tilt and Torsion Angles for a 3-SPS-U Parallel Mechanism. Robotics. 2023; 12(2):50. https://doi.org/10.3390/robotics12020050
Chicago/Turabian StyleVenkateswaran, Swaminath, and Damien Chablat. 2023. "Mapping the Tilt and Torsion Angles for a 3-SPS-U Parallel Mechanism" Robotics 12, no. 2: 50. https://doi.org/10.3390/robotics12020050
APA StyleVenkateswaran, S., & Chablat, D. (2023). Mapping the Tilt and Torsion Angles for a 3-SPS-U Parallel Mechanism. Robotics, 12(2), 50. https://doi.org/10.3390/robotics12020050