
A Unified Methodology for the Generalisation of the Geometry of Features

 ,
,  ,
,  and
and
Abstract
:1. Introduction
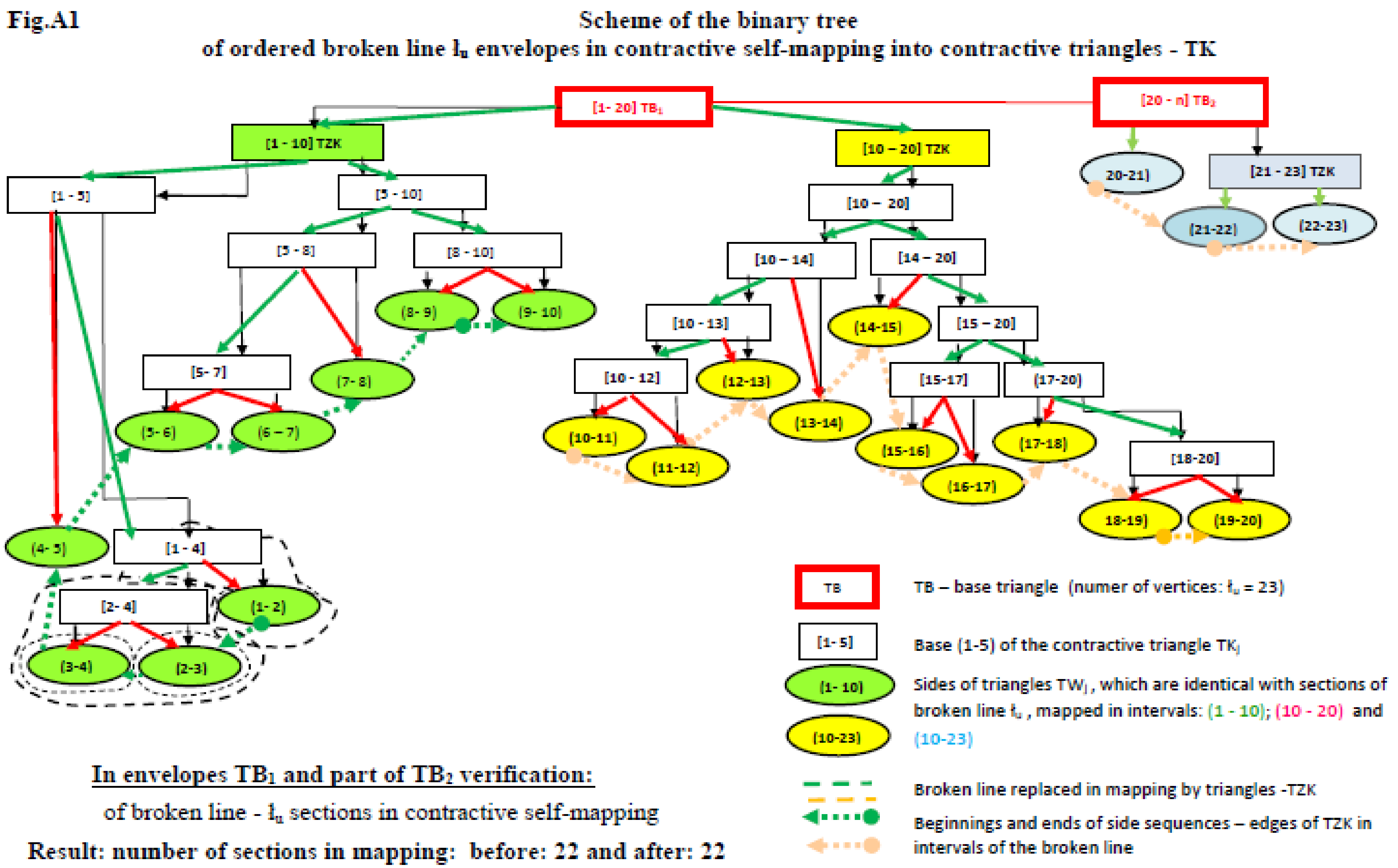
- The necessary condition: the Lipschitz condition (contraction), i.e., p > h, and the Banach theorem in the shrinking projection for TG [12,25] are preserved in each envelope with the sequences of points on the polyline—the contractive mapping with the participation of the binary tree system for the considered triangles:;
- The sufficient conditions of:
2. Metric Space
Cartographic Control of Linear and Areal Objects in a Metric Space
- Natural:
- (a)
- Open linear, represented by sequences of fixed points, the beginning and end of which define one axis of the local coordinate system,
- (b)
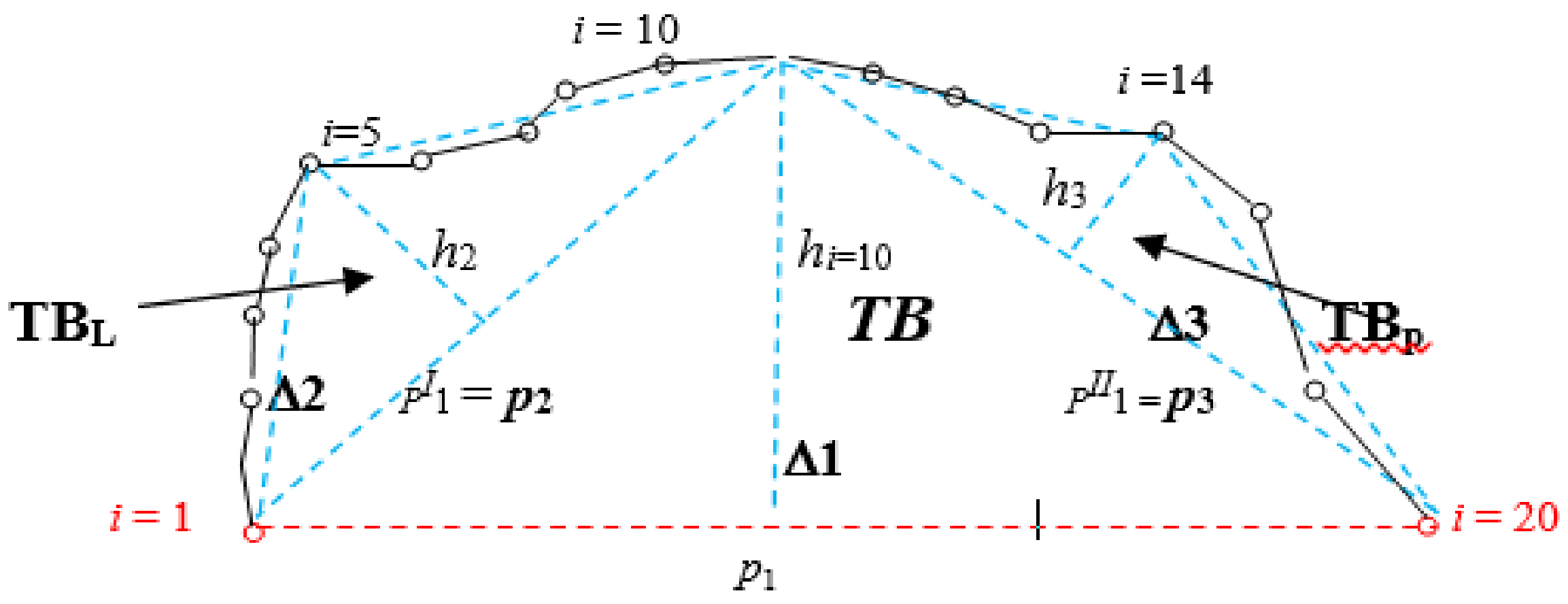
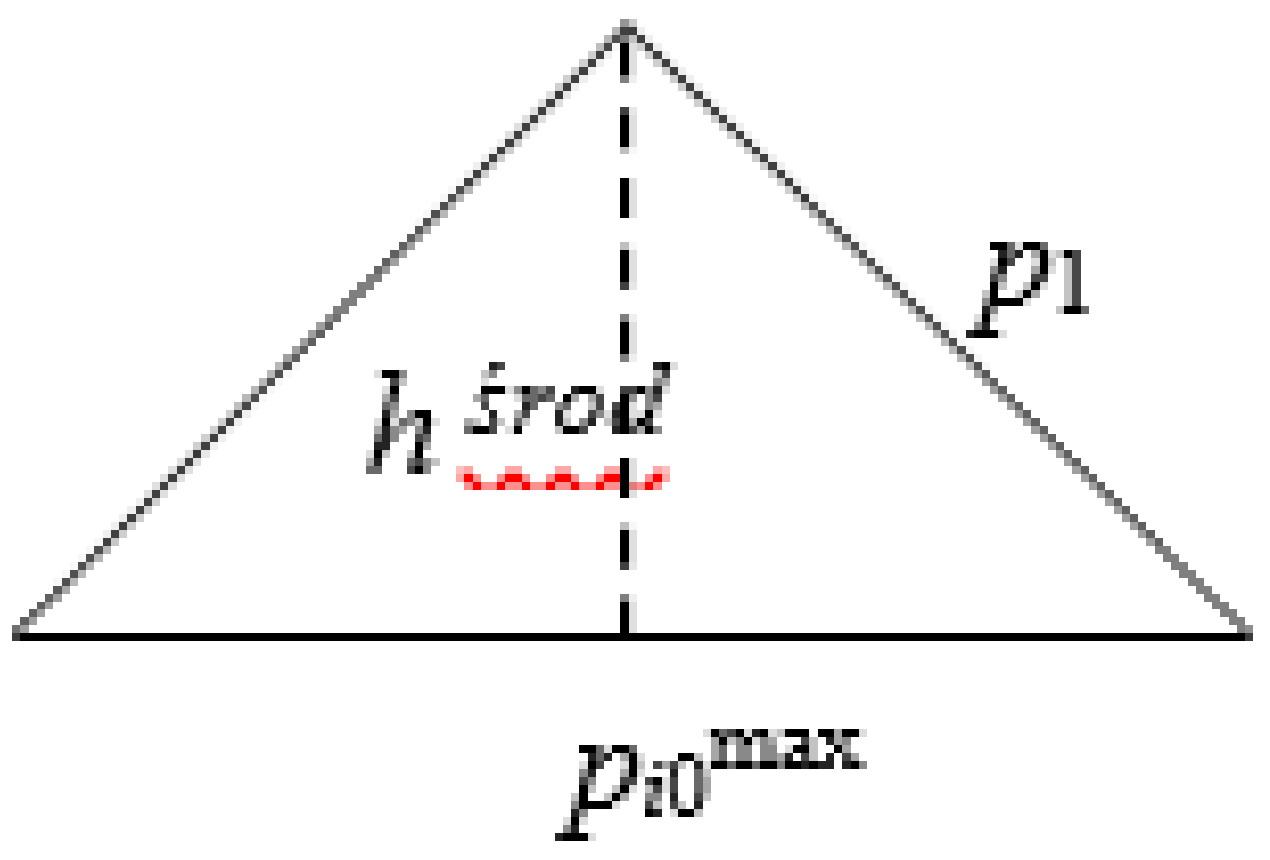
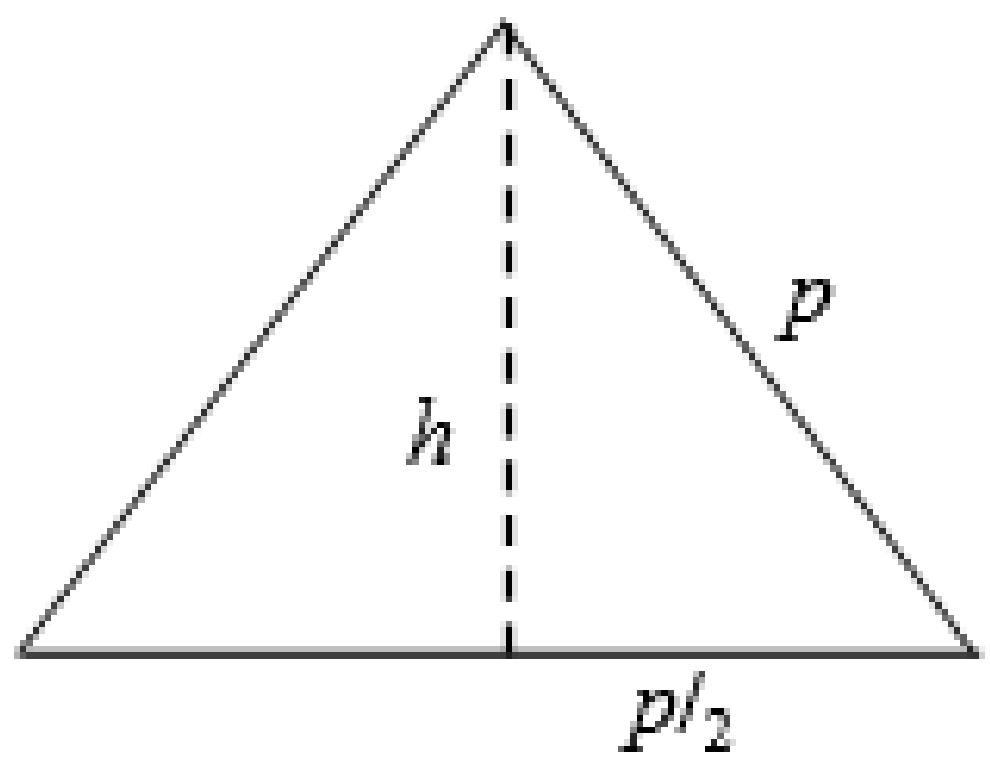
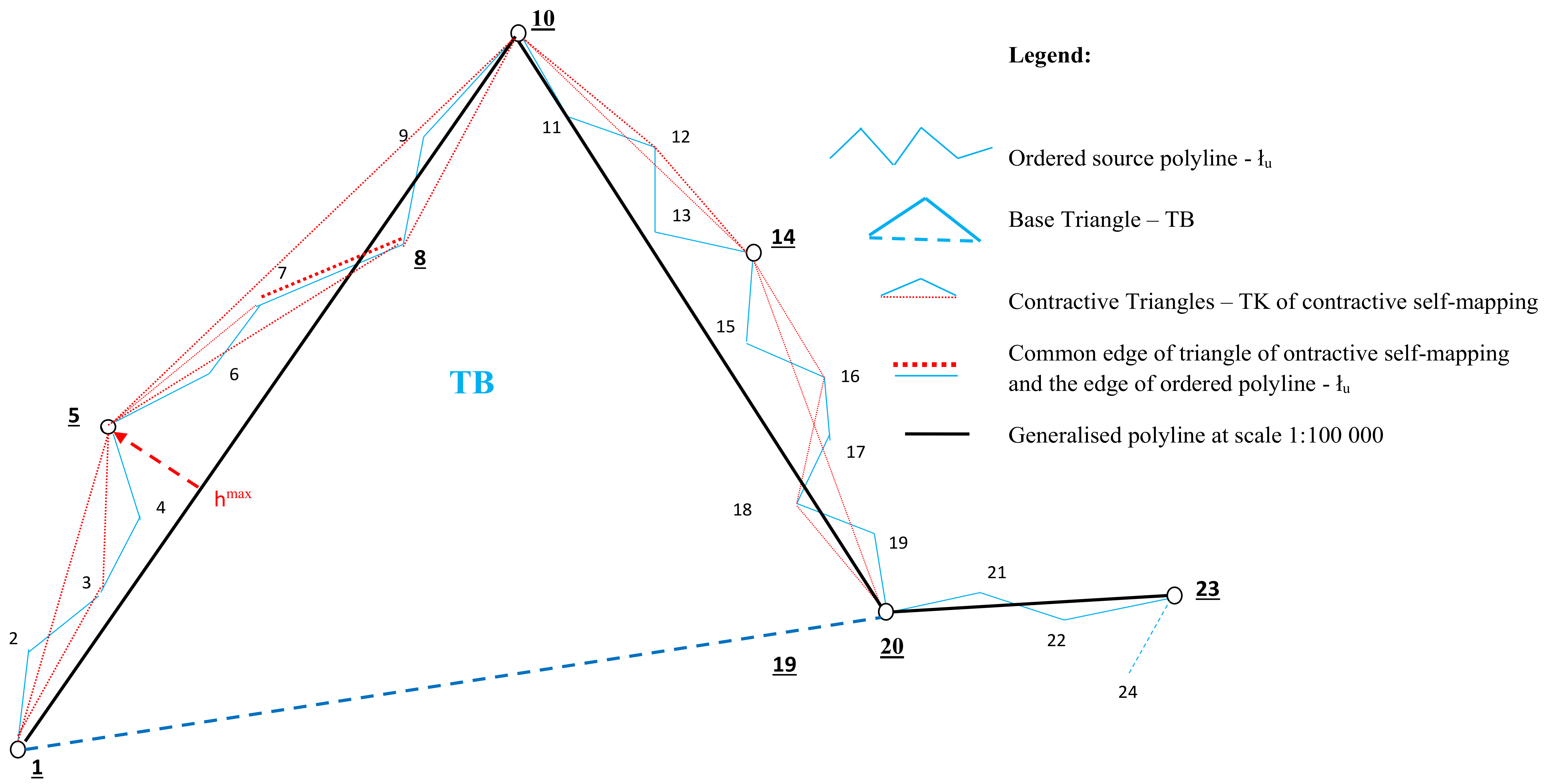
- Areal or base objects, the outline of which is divided into two parts, creating triangles with a common base. The common base has a maximal length (Figure 1), which assures the preservation of the contraction condition when mapping polyline envelopes.
- Snthropogenic:
- (a)
- Buildings, linear objects (roads, engineered rivers) and areal objects.
3. Definitions and Notations
- The first triangle TK in every envelope of the polyline in the contractive self-mapping which has the longest base and fulfils condition (2),
- Consecutive triangles TK which have (a) common side(s) and are constructed according to the binary tree scheme. Their sides are shorter than those of preceding triangles, which results from the assumption of the base TB on the longest section connecting cartographic control points of the areal object,
- The procedure of the contractive self-mapping ends with the triangle TG.
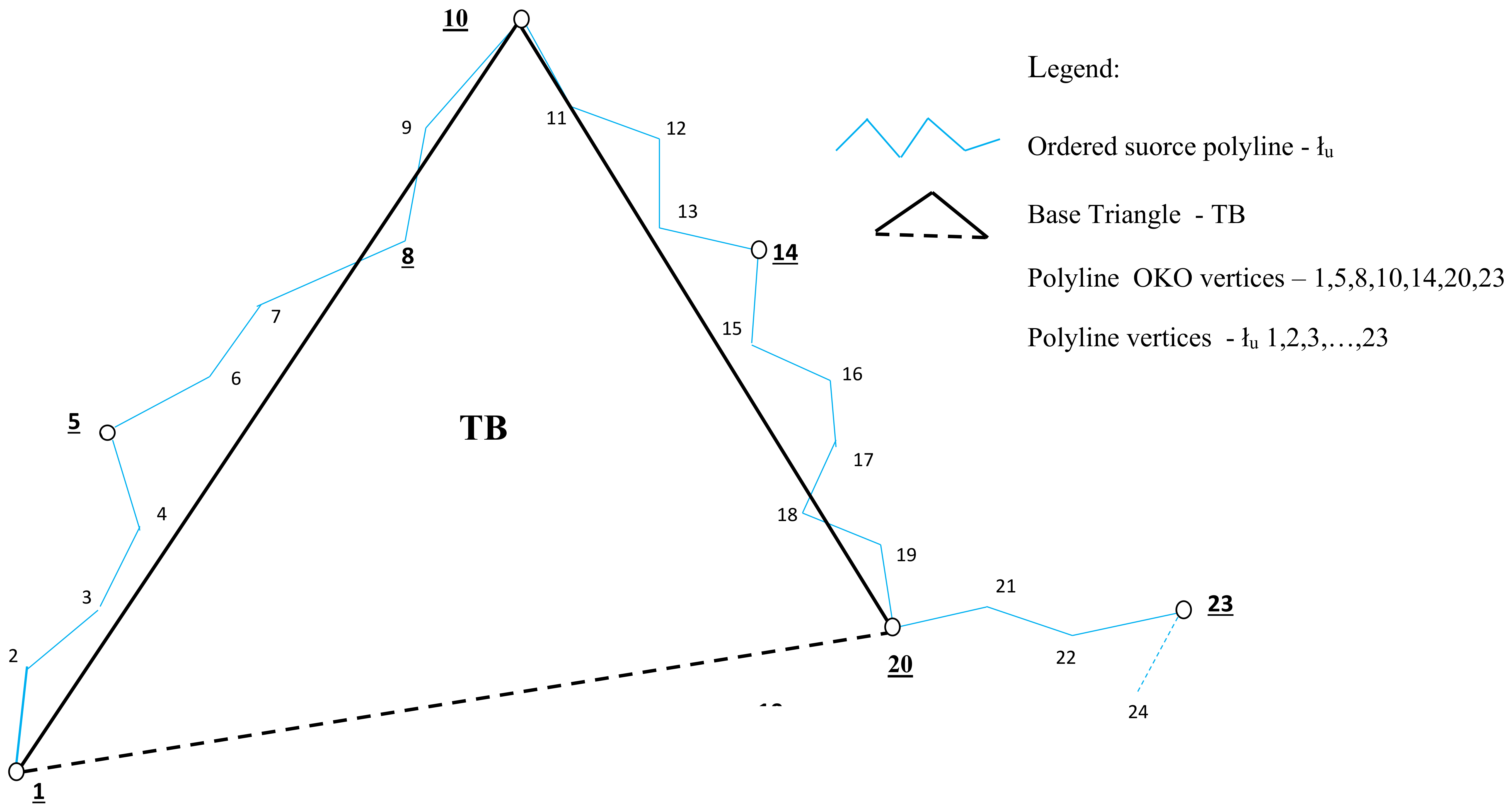
- = ordered polyline, i.e., continuous sequences of points in closed intervals, with nodes;
- i = 1, 2, 3, …, n,
- j = 1, 2, 3, …, k—numbers of triangles—envelopes, built of segments of the polyline;
- αj—Lipschitz constant (of contraction);
- (X, ρX)—metric space with metric ρX;
- f—contraction mapping , the images of which are triangles TK.
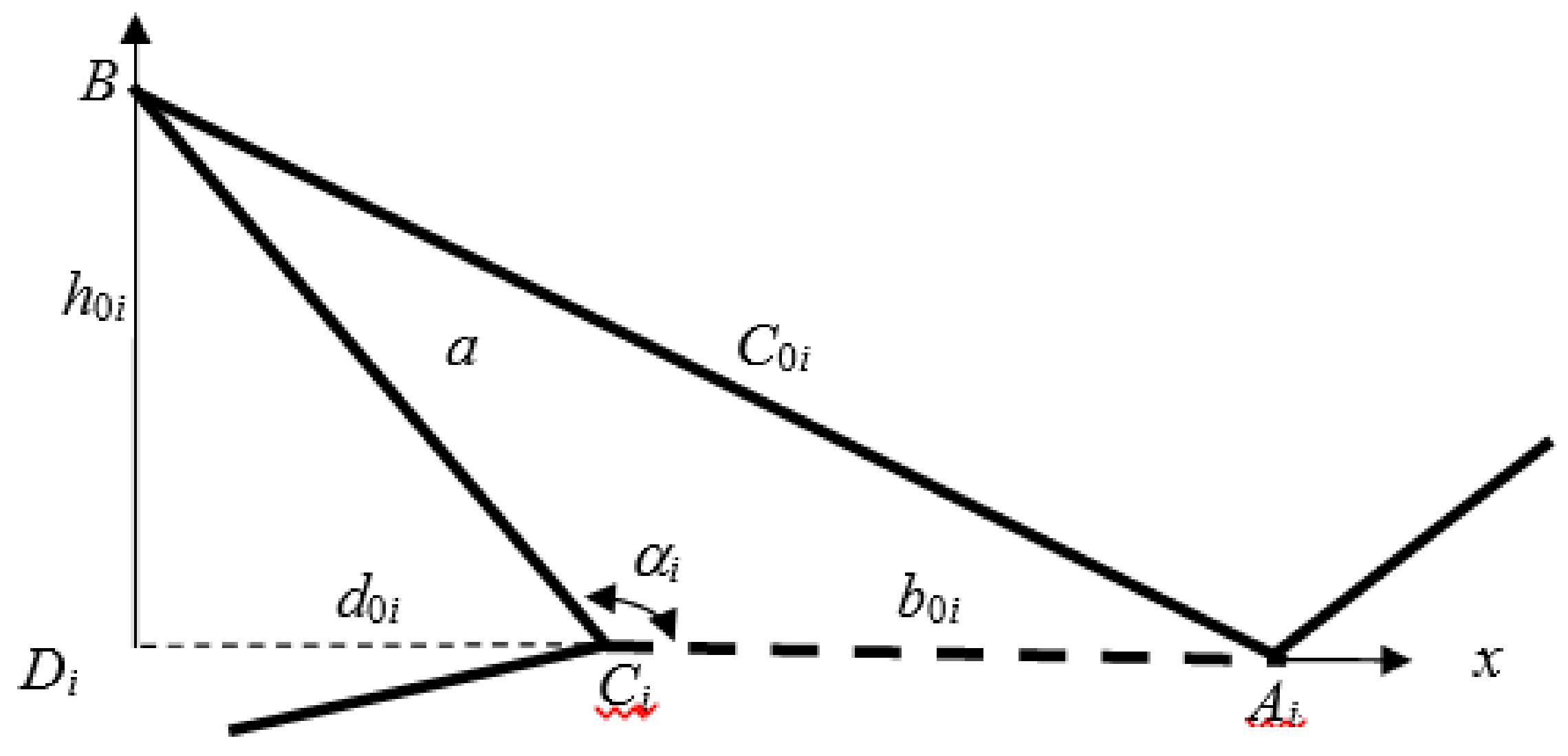
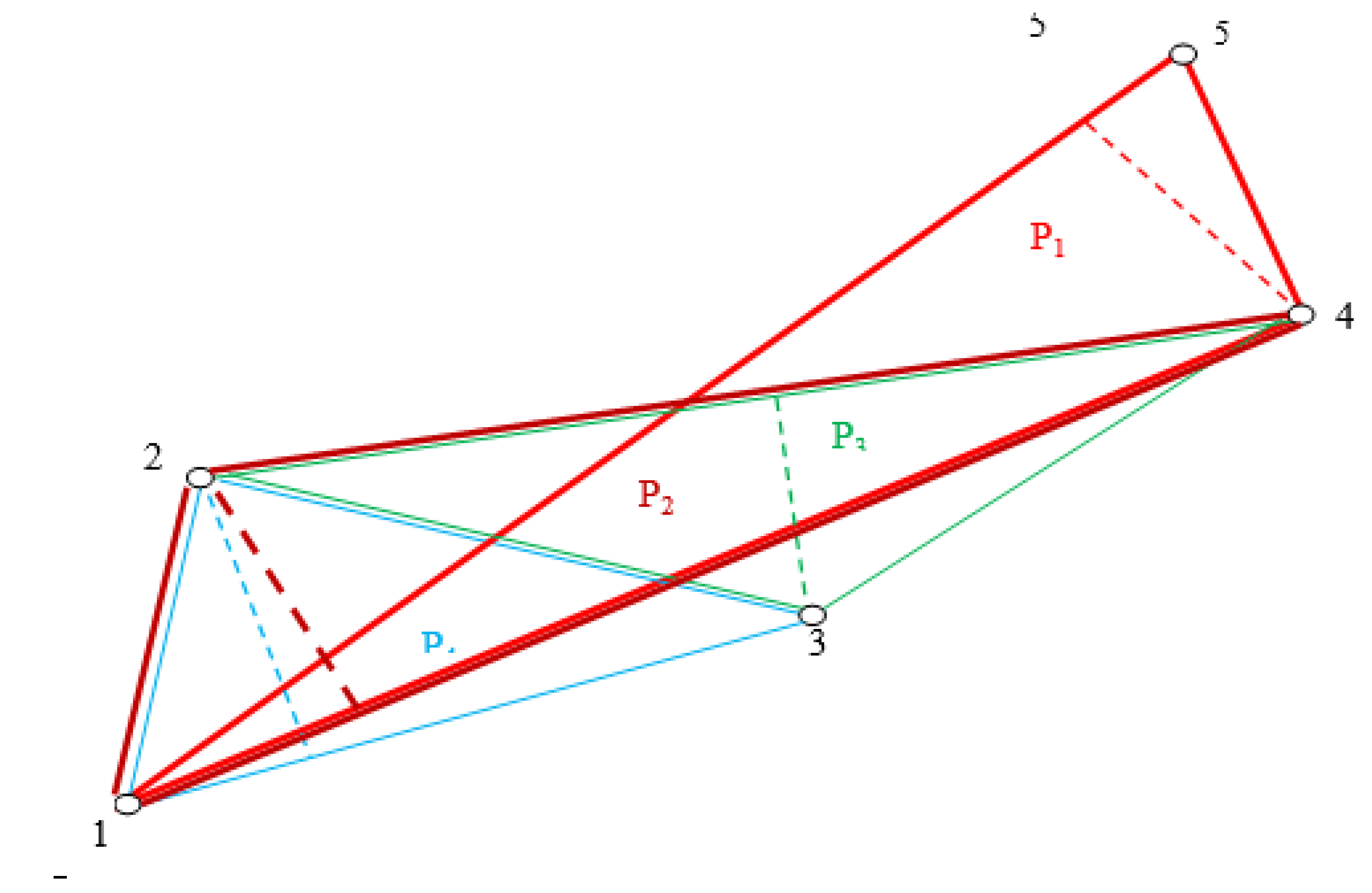
- Triangle sides (edges) are oriented clockwise—when observed from its base (Figure 2);
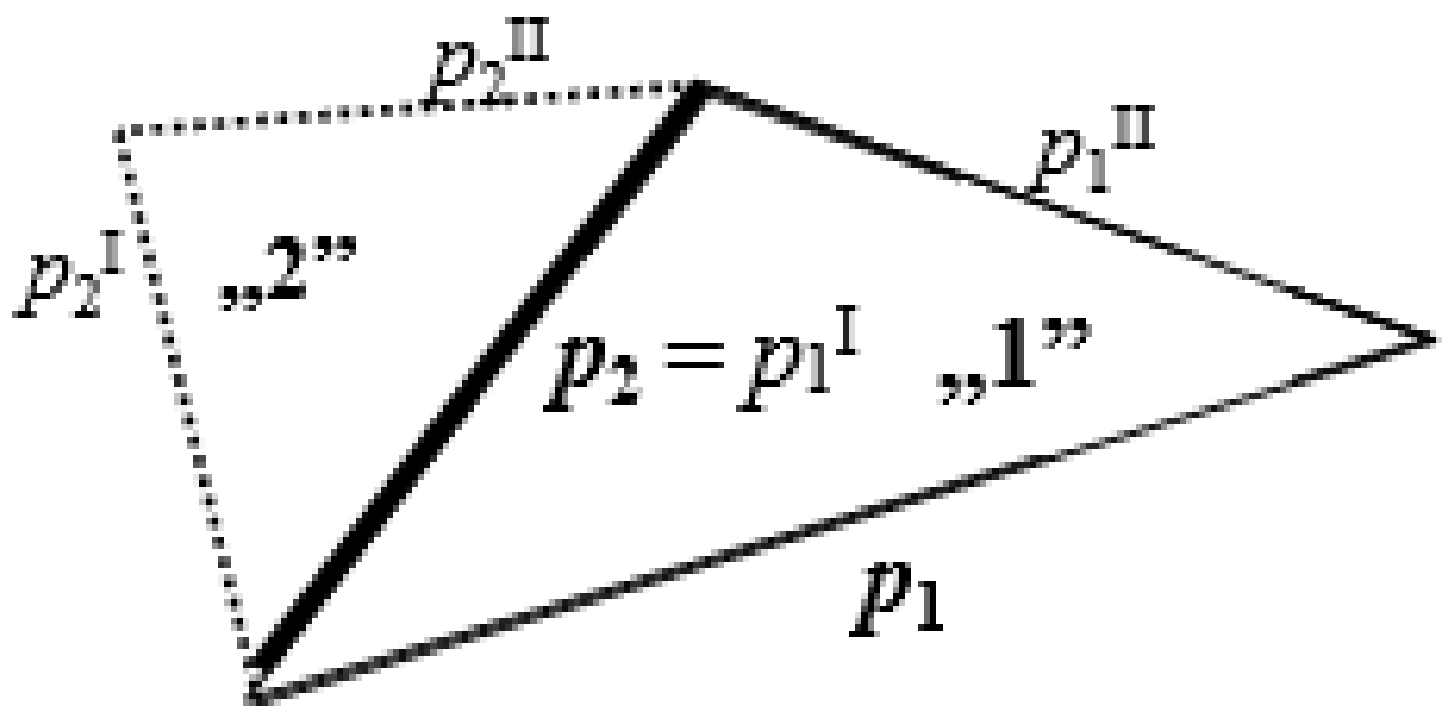
- In a triangle, for j = 1 (TK1), with base p1, sides are marked as:
- (b)
- left: pI1,
- (c)
- right: pII1,
- Consecutive envelopes of the polyline are created according to the binary tree scheme in the form of two triangles with sides:
- (a)
- bases: left p2 and right p3,
- (b)
- sides: left: pI2; pI3 and right: pII2; pII3.
4. The Necessary and Sufficient Conditions for the Contractive Mapping in Digital Generalisation Process
- (a)
- The exclusion of these points from the mapping procedure by setting them limits of intervals;
- (b)
- The preservation of the continuity, repeatability and uniqueness of mapping;
Determination of Singular Points—Nodes of Polyline in Metric Space
5. Contractive Self-Mapping of Ordered Polyline (Segmented Line)
- An unequivocal and user independent result;
- Verification of contractive self-mapping of an ordered polyline result by its original data;
- Preservation of the similarity condition of the polyline by original points in contractive mappings at scales s < 1, which according to the Cauchy condition and minimum dimensions of Salishchev (so univocally) are not removed at a given scale.
In metric space (X, ρ), the f: X → X contractive self-mapping of the ordered polyline into triangles TK with a binary tree structure, is created if the Lipschitz condition is preserved, and if its result is objective and independent from the user at all scales of the generalisation.
- Each pair of neighbouring triangles of polyline , of two consecutive iterations of their construction, has a common side,
- In the envelope of the polyline , the length of the base of each created triangle TK is greater than the length of its edges, which is guaranteed by condition (2).
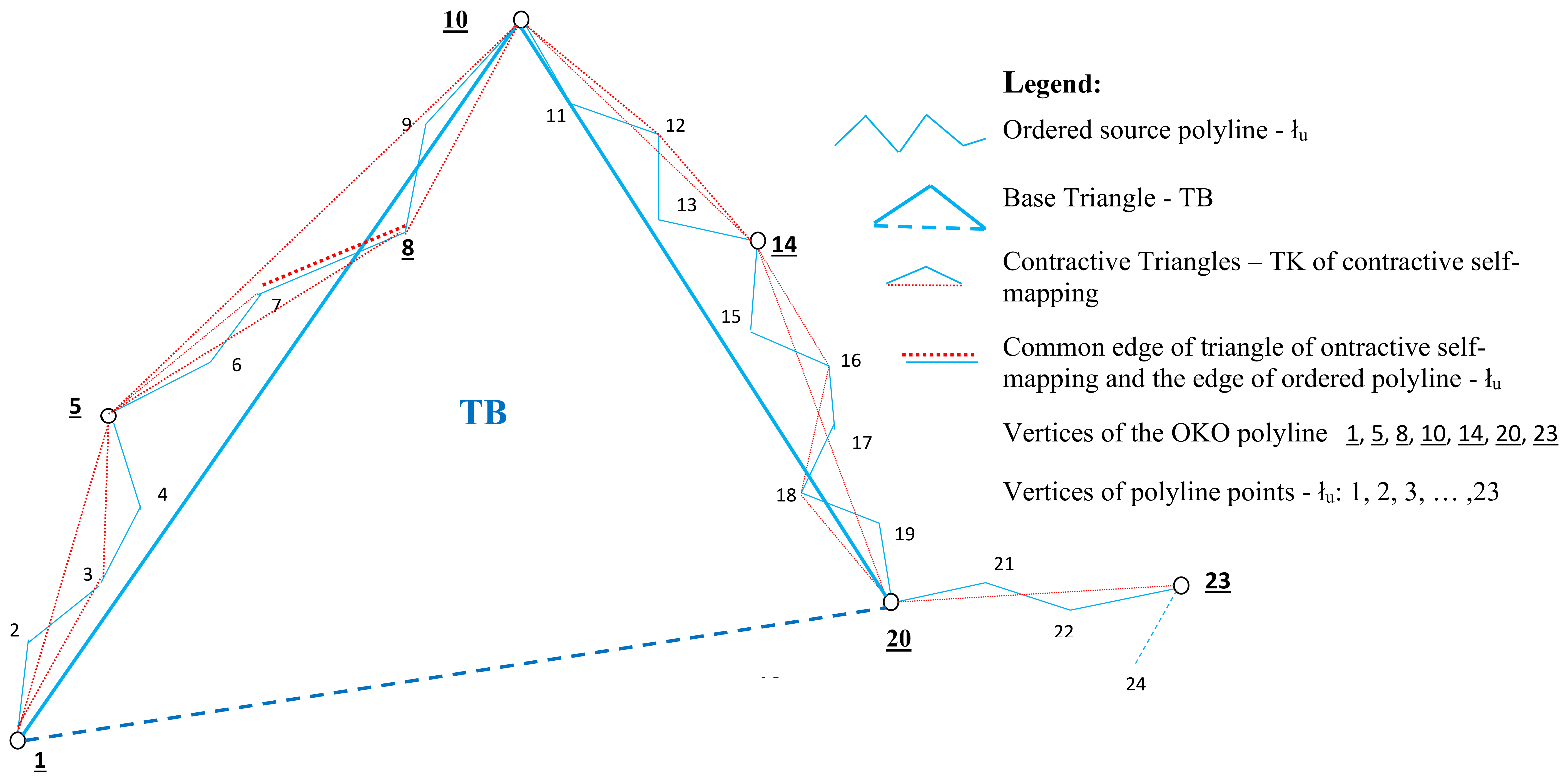
6. The Application of the Contractive Self-Mapping of Polyline for Digital Generalisation at Scales s < 1
7. The Application of the Contractive Self-Mapping in Digital Generalisation at Scales s < 1, Exemplified by the Geometry of A Vistula River Fragment
- Input data (Figure A8):
- (a)
- Loading of vertices of line (col. 3–5);
- (b)
- Entering the thickness of line at scale s (col. 12);
- (c)
- Examining the recognisability of line in accordance with the A. Salishchev metric (col. 8–9);
- (d)
- Determining the upper vertices of line , which are the polyline’s singular points (col. 3–5).
- Creation of the base triangles TB (the so-called envelopes) on line (Figure A8):
- (a)
- Loading of singular points, which form boundaries on line (and which double as bases of triangles TB);
- (b)
- Determination of the length of “p” chords of triangles TB from the beginning and end points of their bases (col.11);
- (c)
- Determination of the centres of the bases of TB triangles (col.11);
- (d)
- Determination of the upper vertices of TB triangles, determined from the source points of line ł (as a y intercept of the centre of the base TB with a side of line ł, and its moving to a closer point on polyline ) (col.10).
- Creation of triangles TK in envelopes of line in accordance with the binary tree scheme (Figure A8.)
- (a)
- Determination of the left and the right side of the base triangle TB (col.6–7);
- (a)
- Determination of the vertex for the left and the right edge in triangle TB, in the same manner as described in point II.4. This results in the first triangles TK1L and TK1P of the envelope (col.10);
- (b)
- Determination of the consecutive iterations of triangles TKLi+1, TKPi+1 from the edges of the triangles from the previous iteration step, in the same manner as described in point III.2, and in accordance with the binary tree scheme (col 10);
- (c)
- Creation/formation of triangles TK on the edges of triangles TBiP, TBiL in each envelope with the top–down approach and in accordance with the binary tree scheme (col 10);
- (d)
- Contractive self-mapping ends the process in the segment of the section if the lengths of the edges of either the TKLk or TKPk triangles are the lengths of a segment of the polyline (col.12).
- Verification of the contractive self-mapping of line :
- (a)
- In the envelope of each line ł, point III.5 is fulfilled.
- Algorithm A0 yields copies of:
- (a)
- Input data,
- (b)
- Triangles TB of base polylines ł, called envelopes, and
- (c)
- Triangles TK in the envelopes of line ł, created in accordance with the binary tree scheme.
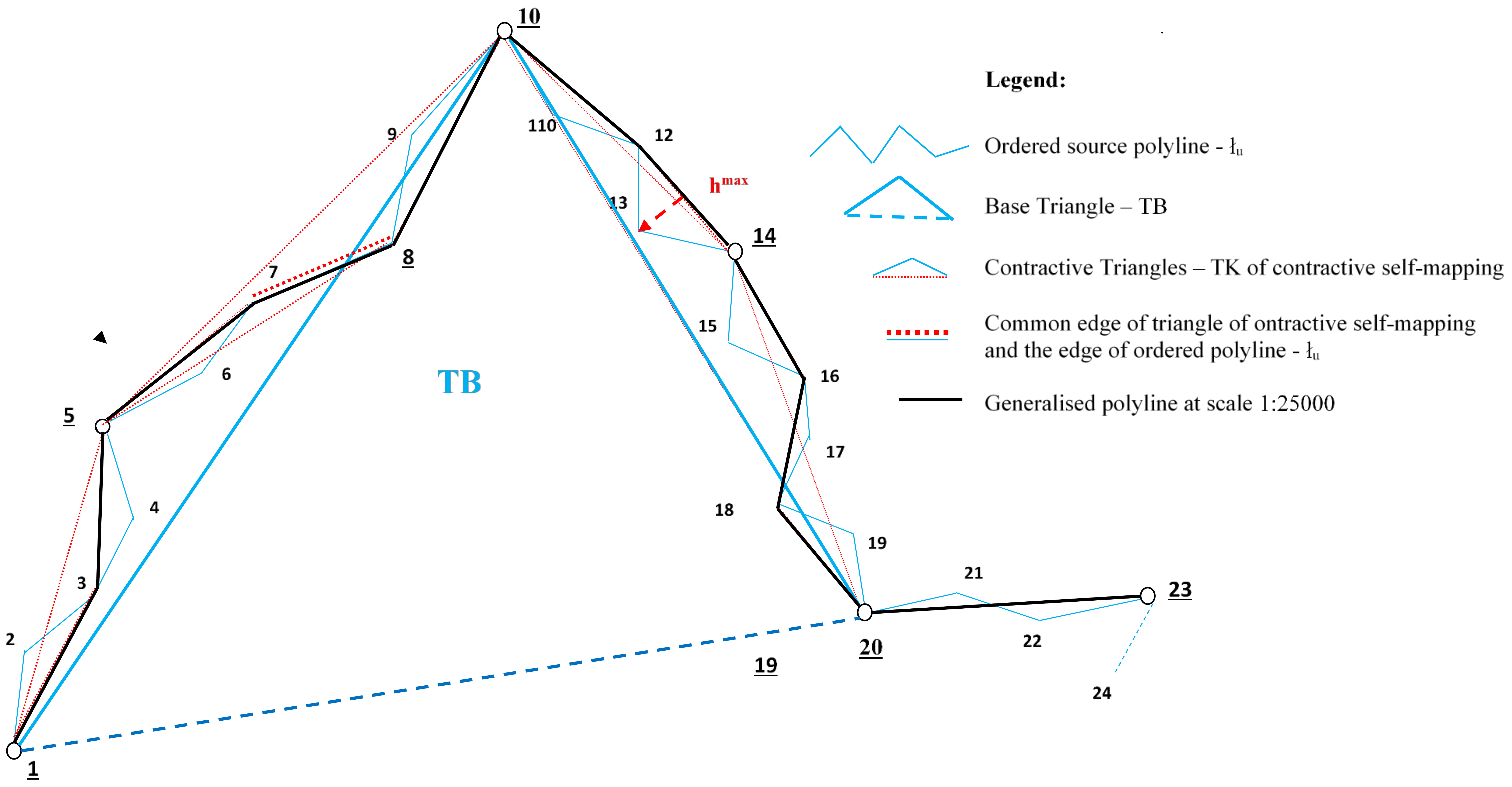
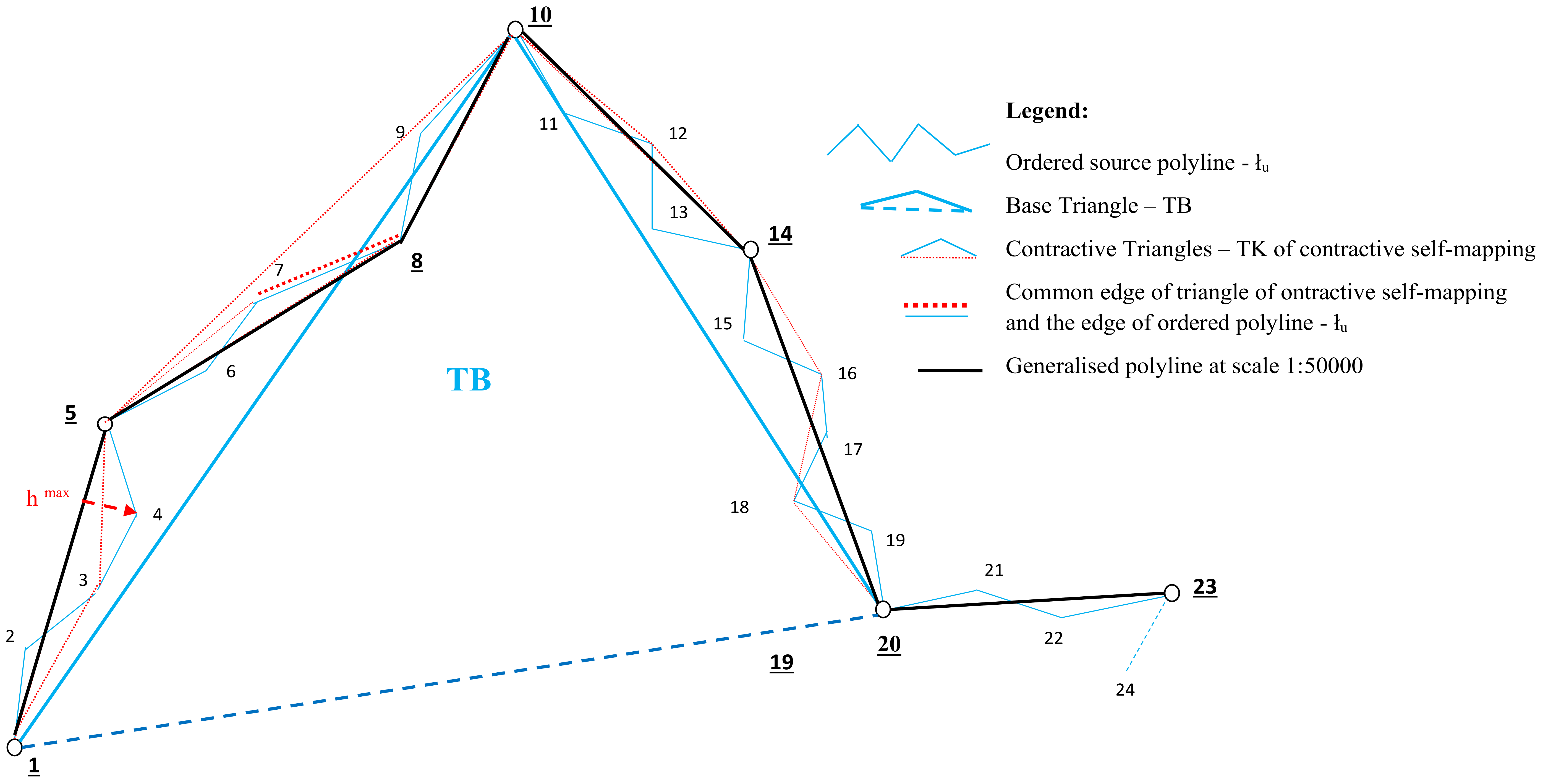
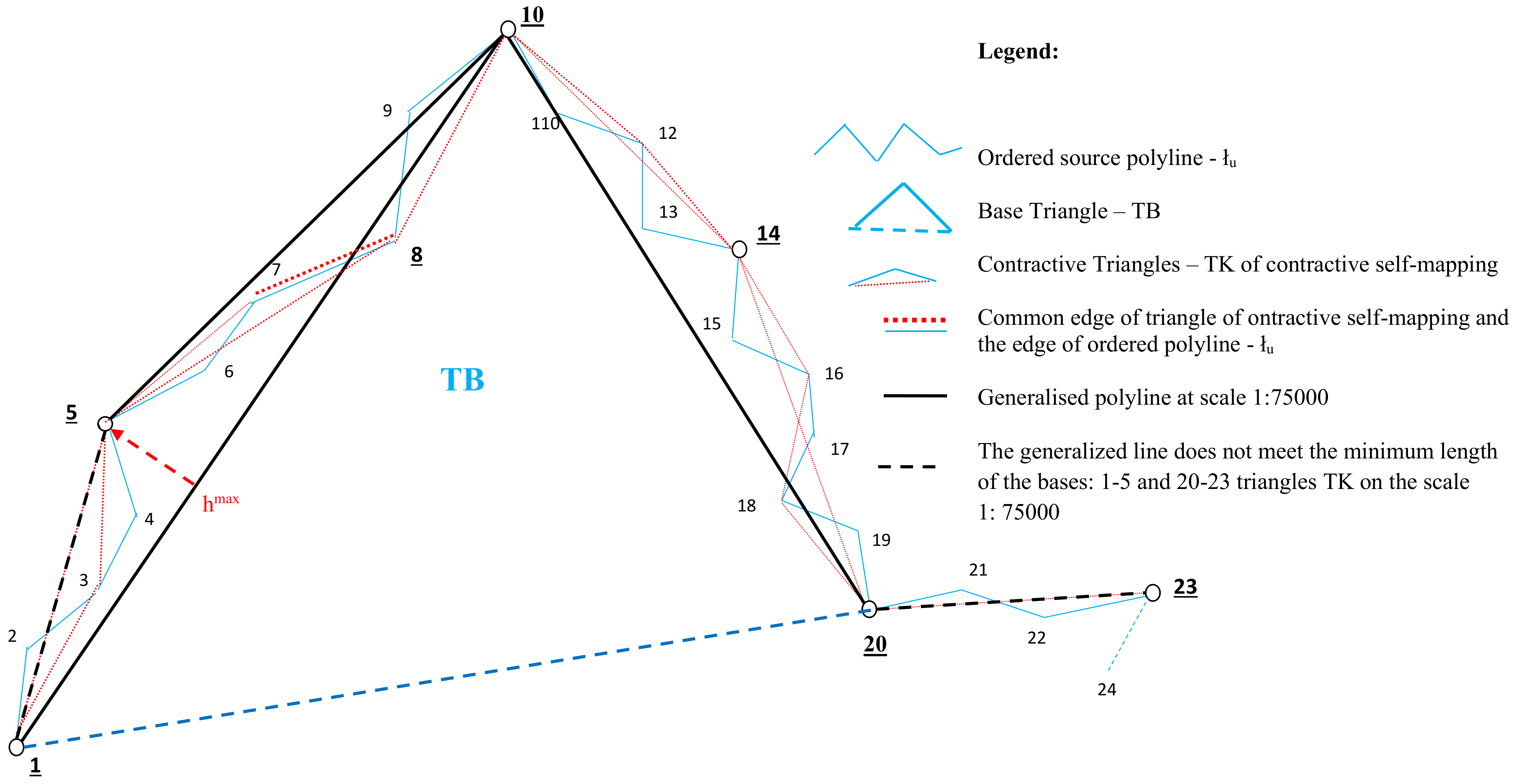
- Creation of generalised triangles TK, depending on the scale s < 1 (Figure A8)
- (a)
- In each envelope of the polyline ł, creating the generalised polyline has an inverse relation to contracted self-mapping (i.e., bottom-up) (col.11–12);
- (b)
- Comparison of the dimensions of bases and the height of triangles TK with the A. Salishchev norm (col. 8–9);
- Control of the results of the generalisation of line at scale s (Figure A9):
- (a)
- (b)
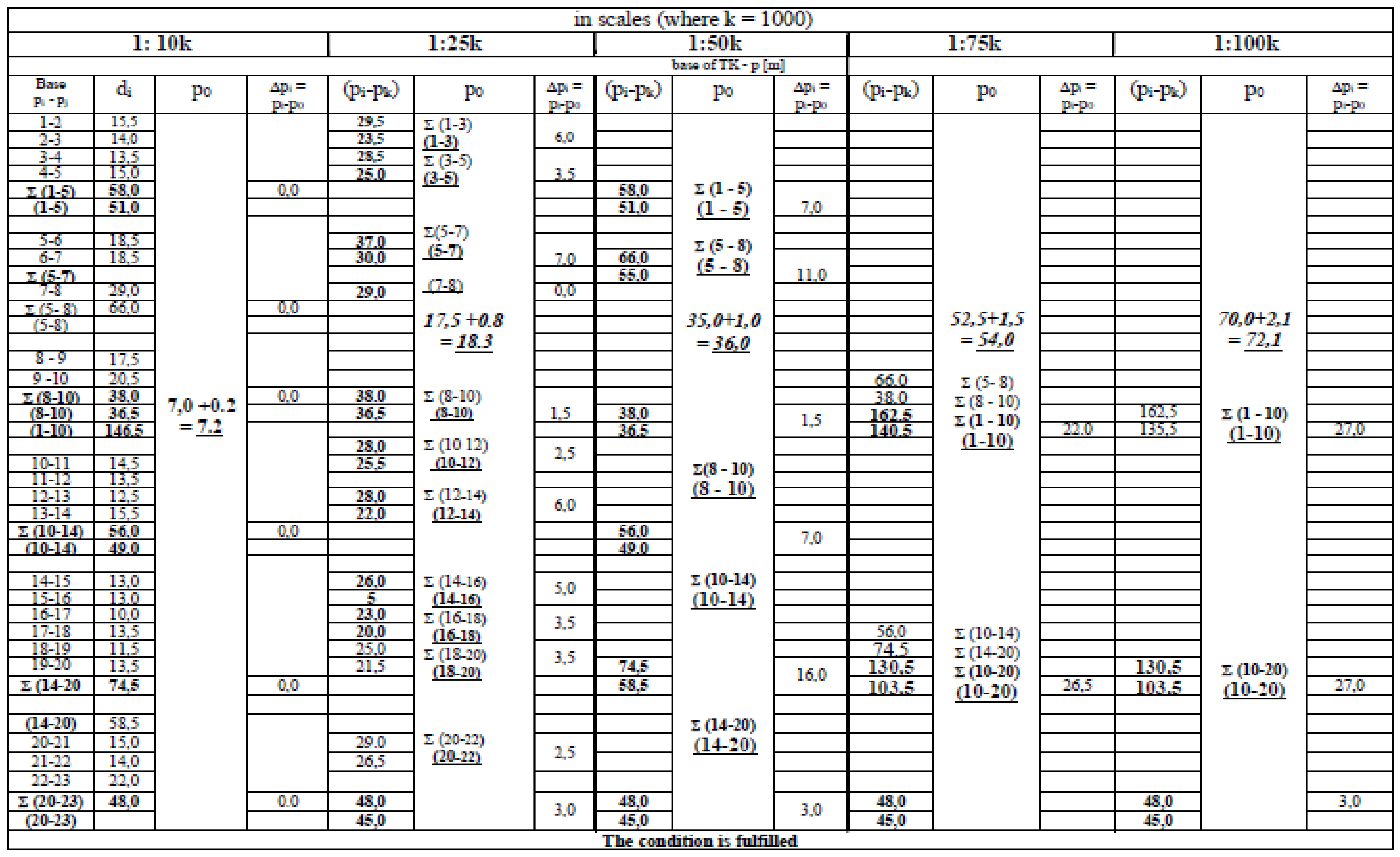
- Verification of dimensions of the Salishchev triangle at scale s through comparison (Figure A5, Figure A6 and Figure A7) of the generalised maximum height of the y coordinate h from the points of the source line to the generalised line with a height dimension, as well as the segments p created for the generalised line with the norm of the dimensions of the base.
- (c)
8. Conclusions
- In every contraction iteration, the nodes of the polyline remaining before and after contractive self-mapping into contractive triangles are invariant and identical (columns 3, 4, 5 with column 11 in Figure A4). This proves that triplet (, , ) is the only one contractive mapping of an ordered polyline into itself;
- In a metric space, the contractive self-mapping f: X → X is continuous, as it fulfils the Lipschitz condition. The equation has one solution that results from the Banach fixed-point theorem. In addition, the sequence , , , is convergent at the “fixed point”—the polyline ;.
- The ordered polyline with a binary tree structure belonging to the metric space is a constant contractive self-mapping into the contractive triangles TK of the digital generalisation at each scale s < 1, if the Lipschitz and Cauchy conditions, and the Salishchev dimensions are fulfilled. Figure A8;
- In metric space, the contractive mapping leading to generalisations of the polyline follows the top–down approach;
- The generalised polyline is unequivocally mapped if it fulfils the following conditions:
- (a)
- Source data of the polyline belong to the metric space , i.e.,
- (b)
- Data of the polyline have the binary tree structure in the mapping;
- (c)
- Transformation f of polyline into triangles TK in its envelopes fulfils the following conditions:
- The contractive self-mapping (data after mapping an object are source data) and at each scale s ≤ 1 fulfil: The Lipschitz contraction condition, and The assumptions of the Banach theorem;
- at scales s < 1 (Every contraction is uniformly continuous in metric space X, as it fulfils the Lipschitz condition. The continuity of a function results from its uniform continuity.), also: the Cauchy condition with minimum dimensions of Salishchev—compatibility of summation of the after-the-mapping and removed vertices of the polyline with the number of the vertices of the source polyline ;
- The method for the object geometry generalisation using the contractive self-mapping is an objective digital generalisation and has economic rationale, as:
- (a)
- One-time update of the source data can be used for all scales s ≤ 1, which significantly lowers the costs of constantly updating through their automation;
- (b)
- Data of an object at scales s < 1 are generalised with the contractive mapping, which at each scale has a single solution, in turn increases the credibility of the gained information. Contractive self-mapping used for the harmonisation of databases in which changing the scale of data is a common occurrence—and contractive self-mapping should complement the metadata of every object.
- The generalisation of geospatial data appears broadly representative of current research trends, where significant positive progress can be expected in the near future [28,29]. As cartographers progress, they strategically expand existing techniques, explore new computational paradigms, and broaden their field of view [30]. Formal methods of geometry generalisation and the assessment of their impact are still not widespread or used. It seems that cartographic generalisation methods should be developed, with the aim of becoming independent from the decisions of an individual operator.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A









References
- Chrobak, T. Badanie przydatności trójkąta elementarnego w komputerowej generalizacji kartograficznej [An Iinvestigation of Elementary Triangle Usefulness for Computer Cartogaphic Generalisation]; Habilitation’s Thesis, 84 Dissertations Monogarphies; UWND AGH: Kraków, Poland, 1999. [Google Scholar]
- Mackaness, W.A.; Ruas, A. Evaluation in the Map Generalisation Process. In Generalisation of Geographic Information: Cartographic Modelling and Applications; Mackaness, W.A., Ruas, A., Sarjakoski, T.L., Eds.; Elsevier: Amsterdam, The Netherlands, 2007; pp. 89–111. [Google Scholar]
- Douglas, D.H.; Peucker, T.K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitised Line or its Caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Bard, S.; Ruas, A. Why and How Evaluating Generalised Data? In Developments in Spatial Data Handling; Fisher, P.F., Ed.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 327–342. [Google Scholar]
- McMaster, R.B. A Statistical Analysis of Mathematical Measures for Linear Simplification. Cartogr. Geogr. Inf. Sci. 1986, 13, 103–116. [Google Scholar] [CrossRef]
- Raposo, P. Scale-specific automated line simplification by vertex clustering on a hexagonal tessellation. Cartogr. Geogr. Inf. Sci. 2013, 40, 427–443. [Google Scholar] [CrossRef]
- Töpfer, F.; Pillewizer, W. The principles of selection. Cartogr. J. 1966, 3, 10–16. [Google Scholar] [CrossRef]
- Chrobak, T.; Szombara, S.; Kozoł, K.; Lupa, M. A method for assessing generalised data accuracy with linear object resolution verification. Geocarto Int. 2017, 32, 238–256. [Google Scholar] [CrossRef]
- Chrobak, T.; Lupa, M.; Szombara, S.; Dejniak, D. The use of cartographic control points in the harmonization and revision of MRDBs. Geocarto Int. 2019, 34, 260–275. [Google Scholar] [CrossRef]
- Lupa, M.; Szombara, S.; Chuchro, M.; Chrobak, T. Limits of colour perception in the context of minimum dimensions in digital cartography. ISPRS Int. J. Geo Inf. 2017, 6, 276. [Google Scholar] [CrossRef]
- Chrobak, T. The role of least image dimensions in generalised of object in spatial databases. Geod. Cartogr. 2010, 59, 99–120. [Google Scholar]
- Chrobak, T.; Keller, S.F.; Kozioł, K.; Szostak, M.; Żukowska, M. Podstawy Cyfrowej Generalizacji Kartograficznej. [The Basics of Digital Cartographic Generalisation]; Uczelniane Wydawnictwa Naukowo-Dydaktyczne AGH: Kraków, Poland, 2007; wyd. 1. [Google Scholar]
- Głażewski, A.; Kowalski, P.J.; Olszewski, R.; Bac-Bronowicz, J. New Approach to Multi Scale Cartographic Modelling of Reference and Thematic Databases in Poland. In Lecture Notes in Geoinformation and Cartography, Cartography in Central and Eastern Europe Selected Papers of the 1st ICA Symposium on Cartography for Central and Eastern Europe; Gartner, G., Ortag, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kowalski, P.J.; Olszewski, R.; Bac-Bronowicz, J. A Multiresolution, Reference and Thematic Database as the NSDI Component in Poland—The Concept and Management Systems. In Lecture Notes in Geoinformation and Cartography, Cartography in Central and Eastern Europe Selected Papers of the 1st ICA Symposium on Cartography for Central and Eastern Europe; Gartner, G., Ortag, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kozioł, K.; Szombara, S. New method of creation data for natural objects in MRDB based on new simplification algorithm. In Proceedings of the 26th International Cartographic Conference; International Cartographic Association: Drezno, Germany, 2013. [Google Scholar]
- Li, Z. Algorithmic Foundation of Multi-Scale Spatial Representation; CRC Press: London, UK, 2007. [Google Scholar]
- Visvalingam, M.; Whyatt, J.D. Line generalisation by repeated elimination of points. Cartogr. J. 1993, 30, 46–51. [Google Scholar] [CrossRef]
- Weibel, R. Generalisation of Spatial Data: Principles and Selected Algorithms. In Algorithmic Foundations of Geographic Information Systems; Van Kreveld, M., Nievergelt, J., Roos, T., Widmayer, P., Eds.; Springer: Berlin/Heidelberg, Germany, 1997; pp. 99–152. [Google Scholar]
- Weibel, R. Amplified intelligence and rule-base systems. In Map Generalisation: Making Rules for Knowldege Representation; Buttenfield, B., McMaster, R., Eds.; Lonman: London, UK, 1991; pp. 172–186. [Google Scholar]
- Blum-Krzywicka, E. Elements of Maps Contents with (0D) Point Reference Units. In Map Functions; Springer Geography Switzerland: Cham, Switzerland, 2017; pp. 41–84. [Google Scholar]
- Burghardt, D.; Duchêne, C.; Machaness, W. Abstracting Geographic Information in a Data Rich World; Springer LNG&C: Cham, Switzerland, 2014; pp. 197–225. [Google Scholar]
- Longley, P.A.; Goodchild, M.; Maguire, D.J.; Rhind, D.W. Geographic Information Systems and Science; Wiley: Hoboken, NJ, USA, 2010; wyd. 3. [Google Scholar]
- Ratajski, L. Metodyka Kartografii Społeczno-gospodarczej [Methodology of the Socio-Economic Cartography]; Państwowe Przedsiębiorstwo Wydawnictw Kartograficznych im. Eugeniusza Romera: Warszawa/Wrocław, Poland, 1989; wyd. 2. [Google Scholar]
- Directive 2007/2/ EC of the European Parliament and of the Council of 14 March 2007, known as the INSPIRE Directive. Directive 2007/2/EC of the European Parliament and of the Council of 14 March 2007 Establishing an Infrastructure for Spatial Information in the European Community (INSPIRE) | INSPIRE (europa.eu). Available online: https://inspire.ec.europa.eu/documents/directive-20072ec-european-parliament-and-council-14-march-2007-establishing (accessed on 23 February 2021).
- Maurin, K. Analiza. Część 1 Elementy; Wydawnictwa Naukowe PWN: Warszawa, Poland, 1991; wyd. V. [Google Scholar]
- Salishchev, K.A. Kartografia Ogólna. [General Cartography]; Wydawnictwo Naukowe PWN: Warszawa, Poland, 2003; wyd. 3. [Google Scholar]
- Dziubiński, I.; Świątkowski, T. Poradnik Matematyczny; Warszawa PWN: Warszawa, Poland, 1982; wyd. III. [Google Scholar]
- Liu, Y.; Li, W. A New Algorithms of Stroke Generation Considering Geometric and Structural Properties of Road Network. ISPRS Int. J. Geo Inf. 2019, 8, 304. [Google Scholar] [CrossRef] [Green Version]
- Courtial, A.; El Ayedi, A.; Touya, G.; Zhang, X. Exploring the Potential of Deep Learning Segmentation for Mountain Roads Generalisation. ISPRS Int. J. Geo Inf. 2020, 9, 338. [Google Scholar] [CrossRef]
- Kronenfeld, B.; Buttenfield, B.; Stanislawski, L. Map generalisation for the Future. ISPRS Int. J. Geo Inf. 2020, 9, 468. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
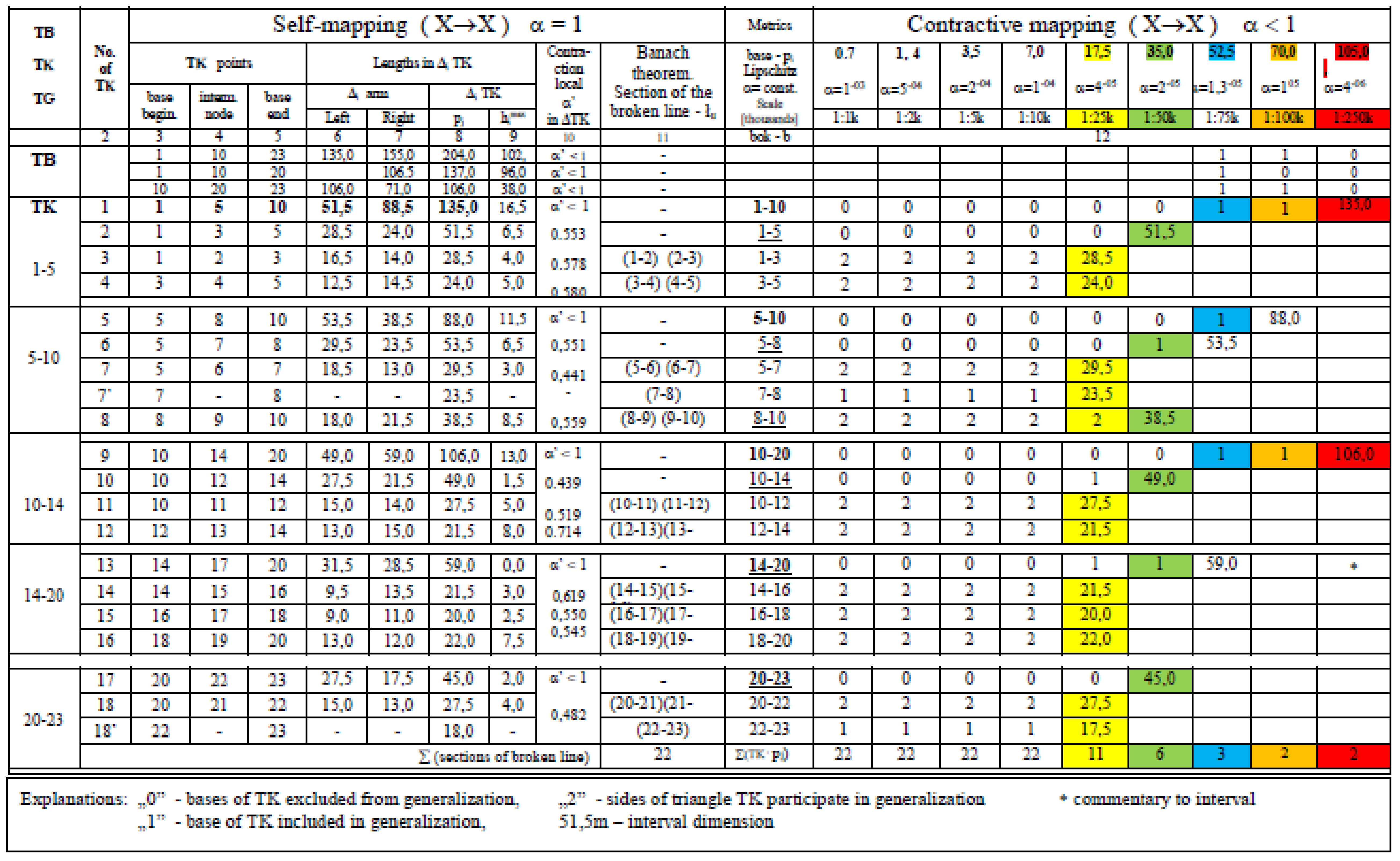
| No TKj | TK | Base pj | Left Edge pjI | Right Edge pjII | Relations | α = pj+1/pj |
|---|---|---|---|---|---|---|
| A | B | C | D | |||
| 1 | 1-4-5 | p1 = 1-5 | pI4-5 | pII1-4 | p1 > pII1-4 = p2 | 0 < p2/p1 < 1 |
| 2 | 1-2-4 | p2 = 1-4 | pI1-2 | pII2-4 | p2 > pII2-4 = p3 | 0 < p3/p2 < 1 |
| 3 | 2-3-4 | p3 = 2-4 | pI3-4 | pII2-3 | p3 > pII2-3 = p4 | 0 < p4/p3 < 1 |
| 4 | 1-2-3 | p4 = 2-3 | pI1-3 | pII2-1 | p4 >
pI1-3 p4 > pII2-1 | 0 < α < 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barańska, A.; Bac-Bronowicz, J.; Dejniak, D.; Lewiński, S.; Krawczyk, A.; Chrobak, T. A Unified Methodology for the Generalisation of the Geometry of Features. ISPRS Int. J. Geo-Inf. 2021, 10, 107. https://doi.org/10.3390/ijgi10030107
Barańska A, Bac-Bronowicz J, Dejniak D, Lewiński S, Krawczyk A, Chrobak T. A Unified Methodology for the Generalisation of the Geometry of Features. ISPRS International Journal of Geo-Information. 2021; 10(3):107. https://doi.org/10.3390/ijgi10030107
Chicago/Turabian StyleBarańska, Anna, Joanna Bac-Bronowicz, Dorota Dejniak, Stanisław Lewiński, Artur Krawczyk, and Tadeusz Chrobak. 2021. "A Unified Methodology for the Generalisation of the Geometry of Features" ISPRS International Journal of Geo-Information 10, no. 3: 107. https://doi.org/10.3390/ijgi10030107
APA StyleBarańska, A., Bac-Bronowicz, J., Dejniak, D., Lewiński, S., Krawczyk, A., & Chrobak, T. (2021). A Unified Methodology for the Generalisation of the Geometry of Features. ISPRS International Journal of Geo-Information, 10(3), 107. https://doi.org/10.3390/ijgi10030107