
A Cellular Automata Model for Integrated Simulation of Land Use and Transport Interactions



Abstract
:1. Introduction
2. A Brief Literature Review of Cellular Automata and Transport Models
3. Model Formulation
4. Model Application and Results
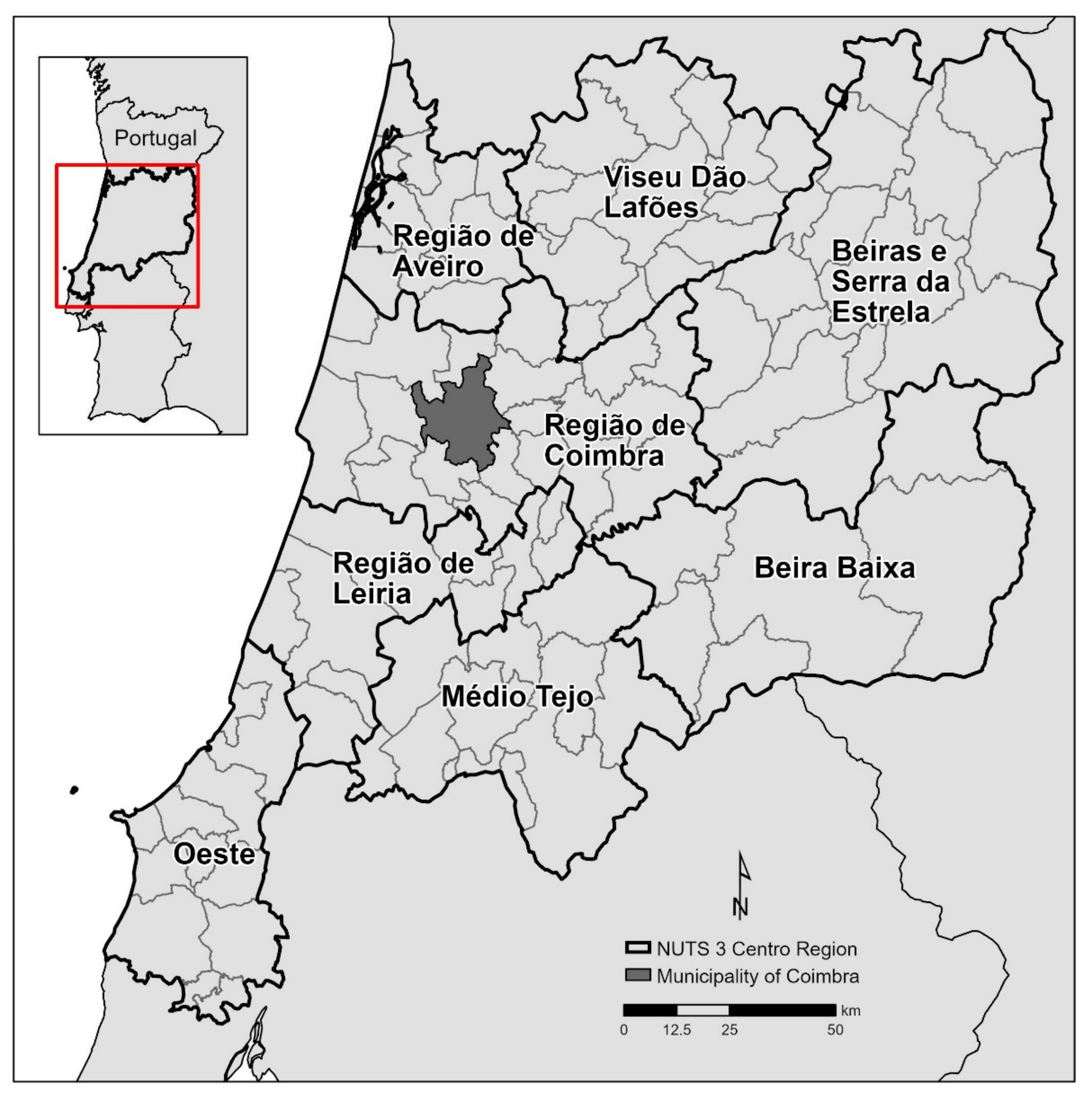
4.1. The Case Study of Coimbra, Portugal
4.2. Model Calibration
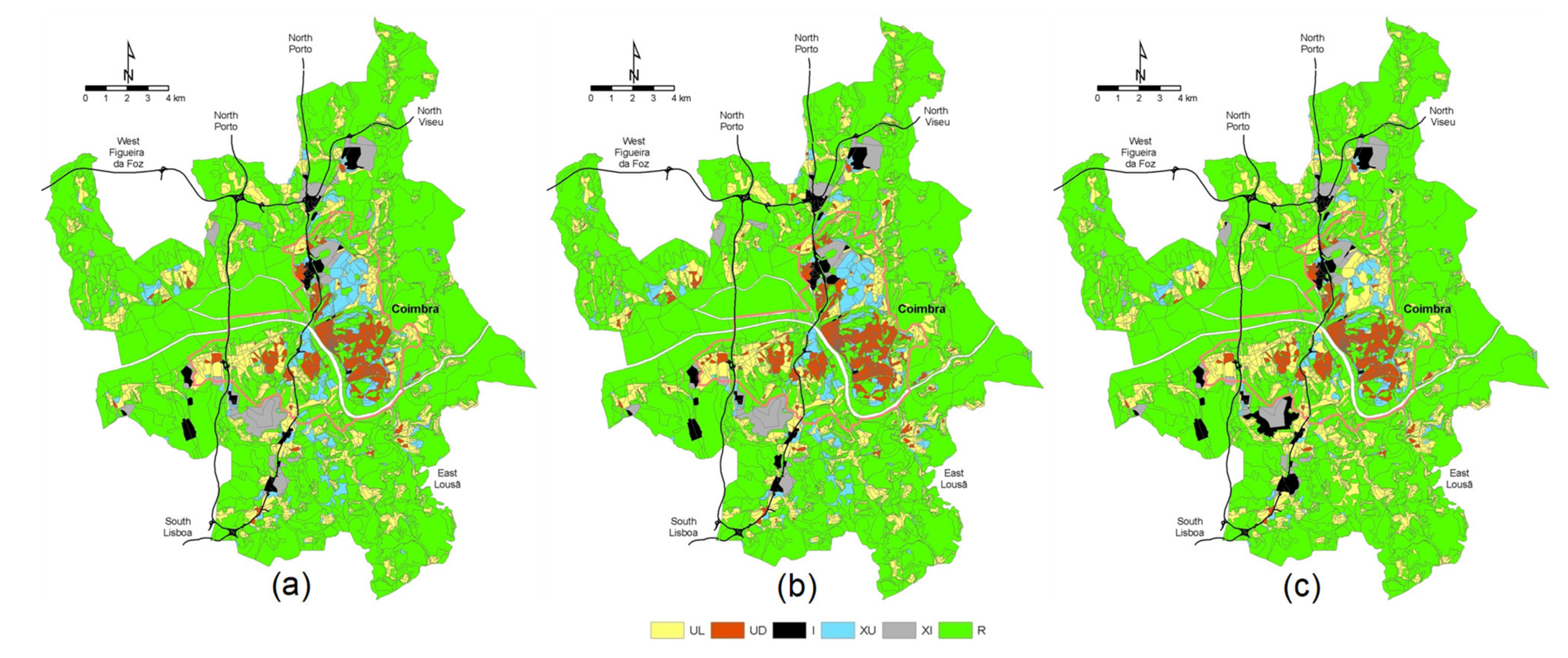
4.3. Scenario Design and Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alonso, W. Location and Land Use: Toward a General Theory of Land Rest; Harvard University Press: Cambridge, MA, USA, 1964; Volume 42, pp. 277–279. [Google Scholar]
- De la Barra, T. Integrated land use and transport modelling: The TRANUS experience. In Planning Support Systems: Integrating Geographical Information Systems, Models and Visualization Tools; Brail, R.K., Klosterman, R.E., Eds.; ESRI Press: Redlands, CA, USA, 2001; pp. 129–156. [Google Scholar]
- Halden, D. Using accessibility measures to integrate land use and transport policy in Edinburgh and the Lothians. Transp. Policy 2002, 9, 313–324. [Google Scholar] [CrossRef]
- Latuso, K. The SPARTACUS system for defining and analysing sustainable land use and transport policies. In Planning Support Systems in Practice; Geertman, S., Stillwell, J., Eds.; Springer: Heidelberg, Germany, 2003; pp. 453–463. [Google Scholar]
- Noth, M.; Borning, A.; Waddell, P. An extensible, modular architecture for simulating urban development, transportation, and environmental impacts. Comput. Environ. Urban Syst. 2003, 27, 181–203. [Google Scholar] [CrossRef]
- Neumann, J. The general and logical theory of automata. In Cerebral Mechanisms in Behavior; The Hixon Symposium; Taub, A.H., Ed.; Wiley: New York, NY, USA, 1951; pp. 1–41. [Google Scholar]
- Ulam, S.M. Some Ideas and Prospects in Biomathematics. Annu. Rev. Biophys. Bioeng 1972, 1, 277–292. [Google Scholar] [CrossRef] [PubMed]
- Benenson, I.; Torrens, P.M. Geosimulation—Automata-Based Modeling of Urban Phenomena, 1st ed.; John Wiley & Sons Ltd.: Chechester, UK, 2004; 287p. [Google Scholar]
- Tobler, W.R. Cellular Geography. In Philosophy in Geography; Gale, S., Olsson, G., Eds.; D. Reidel: Boston, MA, USA, 1979; pp. 379–386. [Google Scholar]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Aljoufie, M.; Zuidgeest, M.; Brussel, M.; van Vliet, J.; van Maarseveen, M. A cellular automata-based land use and transport interaction model applied to Jeddah, Saudi Arabia. Landsc. Urban. Plan. 2013, 112, 89–99. [Google Scholar] [CrossRef]
- Von Neumann, J. Theory of self-reproducing automata. In Information Storage and Retrieval; University of Illinois Press: Urbana, IL, USA, 1969; p. 403. [Google Scholar]
- Batty, M.; Xie, Y. From Cells to Cities. Environ. Plan. B Plan. Des. 1994, 21, S31–S48. [Google Scholar] [CrossRef]
- Couclelis, H. Cellular Worlds: A Framework for Modeling Micro—Macro Dynamics. Environ. Plan. A 1985, 17, 585–596. [Google Scholar] [CrossRef]
- Couclelis, H. Cellular dynamics: How individual decisions lead to global urban change. Eur. J. Oper. Res. 1987, 30, 344–346. [Google Scholar] [CrossRef]
- White, R.; Engelen, G. Cellular automata and fractal urban form: A cellular modelling approach to the evolution of urban land-use patterns. Environ. Plan. A 1993, 25, 1175–1199. [Google Scholar] [CrossRef] [Green Version]
- Barredo, J.; Kasanko, M. Modelling dynamic spatial processes: Simulation of urban future scenarios through cellular automata. Landsc. Urban. 2003, 64, 145–160. [Google Scholar] [CrossRef]
- Crols, T.; White, R.; Uljee, I.; Engelen, G.; Poelmans, L.; Canters, F. A travel time-based variable grid approach for an activity-based cellular automata model. Int. J. Geogr. Inf. Sci. 2015, 29, 1757–1781. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Li, X.; Shi, X.; Wu, S.; Liu, T. Simulating complex urban development using kernel-based non-linear cellular automata. Ecol. Modell. 2008, 211, 169–181. [Google Scholar] [CrossRef]
- Silva, E.A.; Clarke, K.C. Complexity, emergence and cellular urban models: Lessons learned from applying sleuth to two Portuguese metropolitan areas. Eur. Plan. Stud. 2005, 13, 93–116. [Google Scholar] [CrossRef]
- Wu, F.; Webster, C.J. Simulation of land development through the integration of cellular automata and multicriteria evaluation. Environ. Plan. B Plan. Des. 1998, 25, 103–126. [Google Scholar] [CrossRef]
- Campos, P.B.R.; de Almeida, C.M.; de Queiroz, A.P. Educational infrastructure and its impact on urban land use change in a peri-urban area: A cellular-automata based approach. Land Use Policy. 2018, 79, 774–788. [Google Scholar] [CrossRef]
- Abolhasani, S.; Taleai, M.; Karimi, M.; Rezaee Node, A. Simulating urban growth under planning policies through parcel-based cellular automata (ParCA) model. Int. J. Geogr. Inf. Sci. 2016, 30, 2276–2301. [Google Scholar] [CrossRef]
- Barreira-González, P.; Gómez-Delgado, M.; Aguilera-Benavente, F. From raster to vector cellular automata models: A new approach to simulate urban growth with the help of graph theory. Comput. Environ. Urban. Syst. 2015, 54, 119–131. [Google Scholar] [CrossRef]
- Barreira-González, P.; Barros, J. Configuring the neighbourhood effect in irregular cellular automata based models. Int. J. Geogr. Inf. Sci. 2017, 31, 617–636. [Google Scholar] [CrossRef]
- Moreno, N.; Ménard, A.; Marceau, D.J. VecGCA: A vector-based geographic cellular automata model allowing geometric transformations of objects. Environ. Plan. B Plan. Des. 2008, 35, 647–665. [Google Scholar] [CrossRef] [Green Version]
- Moreno, N.; Wang, F.; Marceau, D.J. Implementation of a dynamic neighborhood in a land-use vector-based cellular automata model. Comput. Environ. Urban Syst. 2009, 33, 44–54. [Google Scholar] [CrossRef]
- O’Sullivan, D. Exploring spatial process dynamics using irregular graph-based cellular automaton models. Geogr. Anal. 2001, 33, 1–18. [Google Scholar] [CrossRef]
- Semboloni, F. The growth of an urban cluster into a dynamic self-modifying spatial pattern. Environ. Plan. B Plan. Des. 2000, 27, 549–564. [Google Scholar] [CrossRef]
- Stevens, D.; Dragicevic, S.; Rothley, K. iCity: A GIS-CA modelling tool for urban planning and decision making. Environ. Model Softw. 2007, 22, 761–773. [Google Scholar] [CrossRef]
- Wang, F.; Marceau, D.J. A Patch-based Cellular Automaton for Simulating Land-use Changes at Fine Spatial Resolution. Trans. Gis. 2013, 17, 828–846. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, Y.; Song, S.; Yang, J.; Ding, H. Cellular automata for simulating land-use change with a constrained irregular space representation: A case study in Nanjing city, China. Environ. Plan. B Urban. Anal. City Sci. 2020, 1–19. [Google Scholar]
- Chen, Y.; Liu, X.; Li, X. Calibrating a Land Parcel Cellular Automaton (LP-CA) for urban growth simulation based on ensemble learning. Int. J. Geogr. Inf. Sci. 2017, 31, 2480–2504. [Google Scholar] [CrossRef]
- Antunes, A.; Seco, Á.; Pinto, N. An accessibility-maximization approach to road network planning. Comput. Civ. Infrastruct. Eng. 2003, 18, 224–240. [Google Scholar] [CrossRef]
- Dalvi, M.Q. Behavioural modelling, accessibility, mobility and need: Concepts and measurement. In Behavioural Travel Modelling; Croom Helm: London, UK, 1978; pp. 639–653. [Google Scholar]
- Bhat, C.R.; Handy, S.L.; Kockelman, K.M.; Mahmassani, M.; Chen, Q.; Weston, L. Development of an Urban Accessibility Index: Literature Review. 2000. Available online: https://trid.trb.org/view/719047 (accessed on 30 December 2020).
- Bertolini, L.; le Clercq, F.; Kapoen, L. Sustainable accessibility: A conceptual framework to integrate transport and land use plan-making. Two test-applications in the Netherlands and a reflection on the way forward. Transp. Policy 2005, 12, 207–220. [Google Scholar] [CrossRef]
- CURR. Mandebus—Manchester Decision Based Urban Simulator: Final Report to SSRC. Results from a Single Zone Model; Centre for Urban and Regional Research, University of Manchester: Manchester, UK, 1981; unpublished work. [Google Scholar]
- Waddell, P. Between politics and planning: UrbanSim as a decision-support system for metropolitan planning. In Planning Support Systems: Integrating Geographical Information Systems, Models and Visualization Tools; Brail, R.K., Klosterman, R.E., Eds.; ESRI Press: Redlands, CA, USA, 2001; pp. 201–228. [Google Scholar]
- Santé, I.; García, A.M.; Miranda, D.; Crecente, R. Cellular automata models for the simulation of real-world urban processes: A review and analysis. Landsc. Urban. Plan. 2010, 96, 108–122. [Google Scholar] [CrossRef]
- Basse, R.M. A constrained cellular automata model to simulate the potential effects of high-speed train stations on land-use dynamics in trans-border regions. J. Transp. Geogr. 2013, 32, 23–37. [Google Scholar] [CrossRef]
- Clarke, K.C.; Hoppen, S.; Gaydos, L. A self-modifying cellular automaton model of historical urbanization in the San Francisco Bay area. Environ. Plan. B Plan. Des. 1997, 24, 247–261. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Okada, N.; Zhang, Q.; Shi, P.; Li, J. Modelling dynamic urban expansion processes incorporating a potential model with cellular automata. Landsc. Urban Plan. 2008, 86, 79–91. [Google Scholar] [CrossRef]
- Li, X.; Yeh, A.G.O. Modelling sustainable urban development by the integration of constrained cellular automata and GIS. Int. J. Geogr. Inf. Sci. 2000, 14, 131–152. [Google Scholar] [CrossRef]
- Sakieh, Y.; Salmanmahiny, A.; Jafarnezhad, J.; Mehri, A.; Kamyab, H.; Galdavi, S. Evaluating the strategy of decentralized urban land-use planning in a developing region. Land Use Policy 2015, 48, 534–551. [Google Scholar] [CrossRef]
- Yang, Q.S.; Li, X.; Shi, X. Cellular automata for simulating land use changes based on support vector machines. Comput. Geosci. 2008, 34, 592–602. [Google Scholar] [CrossRef]
- Navarro Cerrillo, R.M.; Palacios Rodríguez, G.; Clavero Rumbao, I.; Lara, M.Á.; Bonet, F.J.; Mesas-Carrascosa, F.-J. Modeling Major Rural Land-Use Changes Using the GIS-Based Cellular Automata Metronamica Model: The Case of Andalusia (Southern Spain). ISPRS Int. J. Geo-Inf. 2020, 9, 458. [Google Scholar] [CrossRef]
- Zhao, L.; Shen, L. The impacts of rail transit on future urban land use development: A case study in Wuhan, China. Transp. Policy 2019, 81, 396–405. [Google Scholar] [CrossRef]
- RIKS. Metronamica. Maastricht, The Netherlands. 2015. Available online: http://www.metronamica.nl/ (accessed on 30 December 2020).
- Zhao, L.; Peng, Z.R. LandSys: An agent-based Cellular Automata model of land use change developed for transportation analysis. J. Transp. Geogr. 2012, 25, 35–49. [Google Scholar] [CrossRef]
- Couto, P. Assessing the accuracy of spatial simulation models. Ecol. Modell. 2003, 167, 181–198. [Google Scholar] [CrossRef]
- Cohen, J. A coeficient of agreement for nominals scales. J. Educ. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices. The Photogrammetric Record; Wiley: New York, NY, USA, 2009; Volume 2, 183p. Available online: http://www.loc.gov/catdir/enhancements/fy0744/98029658-d.html (accessed on 30 December 2020).
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Kang, J.; Fang, L.; Li, S.; Wang, X. Parallel Cellular Automata Markov Model for Land Use Change Prediction over MapReduce Framework. ISPRS Int. J. Geo-Inf. 2019, 8, 454. [Google Scholar] [CrossRef] [Green Version]
- Grinblat, Y.; Gilichinsky, M.; Benenson, I. Cellular Automata Modeling of Land-Use/Land-Cover Dynamics: Questioning the Reliability of Data Sources and Classification Methods. Ann. Am. Assoc. Geogr. 2016, 106, 1299–1320. [Google Scholar] [CrossRef]
- Petrov, L.O.; Lavalle, C.; Kasanko, M. Urban land use scenarios for a tourist region in Europe: Applying the MOLAND model to Algarve, Portugal. Landsc. Urban Plan. 2009, 92, 10–23. [Google Scholar] [CrossRef]
- Van Vliet, J.; Bregt, A.K.; Hagen-Zanker, A. Revisiting Kappa to account for change in the accuracy assessment of land-use change models. Ecol. Modell. 2011, 222, 1367–1375. [Google Scholar] [CrossRef]
- Pinto, N.N.; Antunes, A.P. A cellular automata model based on irregular cells: Application to small urban areas. Environ. Plan. B Plan. Des. 2010, 37, 1095–1114. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In MHS’95 Proceedings of the Sixth International Symposium on Micro Machine and Human Science; IEEE: New York, NY, USA, 1995; pp. 39–43. Available online: http://ieeexplore.ieee.org/document/494215/ (accessed on 30 December 2020).
- Parsopoulos, K. Recent approaches to global optimization problems through particle swarm optimization. Nat. Comput. 2002, 1, 235–306. [Google Scholar] [CrossRef]
- Pinto, N.; Antunes, A.P.; Roca, J. Applicability and calibration of an irregular cellular automata model for land use change. Comput. Environ. Urban Syst. 2017, 65, 93–102. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Liu, Y.; Tong, X.; Liu, M.; Deng, S. Modeling dynamic urban growth using cellular automata and particle swarm optimization rules. Landsc. Urban Plan. 2011, 102, 188–196. [Google Scholar] [CrossRef]
- Liao, J.; Tang, L.; Shao, G.; Qiu, Q.; Wang, C.; Zheng, S.; Su, X. A neighbor decay cellular automata approach for simulating urban expansion based on particle swarm intelligence. Int. J. Geogr. Inf. Sci. 2014, 28, 720–738. [Google Scholar] [CrossRef]
- INE. As Cidades em Números. 1.0; Instituto Nacional de Estatística: Lisbon, Portugal, 2004. [Google Scholar]
- INE. Censos 2001. 1.0; Instituto Nacional de Estatística: Lisbon, Portugal, 2001; Available online: http://www.ine.pt (accessed on 30 December 2020).
- GEP. Boletim do Trabalho e Emprego. Available online: http://bte.gep.mtsss.gov.pt/bteonline.php (accessed on 30 December 2020).
- Xiang, W.N.; Clarke, K.C. The use of scenarios in land-use planning. Environ. Plan. B Plan. Des. 2003, 30, 885–909. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2001–2011 | 2011–2021 | |
|---|---|---|
| Population | +3% | +2% |
| Employment | +2% | +2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinto, N.; Antunes, A.P.; Roca, J. A Cellular Automata Model for Integrated Simulation of Land Use and Transport Interactions. ISPRS Int. J. Geo-Inf. 2021, 10, 149. https://doi.org/10.3390/ijgi10030149
Pinto N, Antunes AP, Roca J. A Cellular Automata Model for Integrated Simulation of Land Use and Transport Interactions. ISPRS International Journal of Geo-Information. 2021; 10(3):149. https://doi.org/10.3390/ijgi10030149
Chicago/Turabian StylePinto, Nuno, António P. Antunes, and Josep Roca. 2021. "A Cellular Automata Model for Integrated Simulation of Land Use and Transport Interactions" ISPRS International Journal of Geo-Information 10, no. 3: 149. https://doi.org/10.3390/ijgi10030149
APA StylePinto, N., Antunes, A. P., & Roca, J. (2021). A Cellular Automata Model for Integrated Simulation of Land Use and Transport Interactions. ISPRS International Journal of Geo-Information, 10(3), 149. https://doi.org/10.3390/ijgi10030149