
Depth Contours and Coastline Generalization for Harbour and Approach Nautical Charts




Abstract
:1. Introduction
- A high-resolution digital elevation model (DEM, 5 m) vertically referenced to the chart datum as a source for depth contours.
- High-resolution measurements for the coastline.
- The scales of the target nautical charts are 1:10 K, 1:20 K, 1:40 K and 1:80 K (harbour and approach scale ranges).
- The generalization procedures developed in this study should be standard geoprocessing functions available in a geographic information system (GIS) environment in order to allow easy implementation and support chart production, thus reducing production time and costs.
- Soundings, which are the most critical features in nautical charting and have a strict topological relationship with both shoreline and depth contours, are also generalized to show the configuration of the seafloor for safe navigation [7]. The generalized soundings are used as a critical element in the contours generalization procedure as it will be documented in this paper.
2. Background
2.1. Depth Contours Standards and Constraints
- The legibility constraint: generalized contours must be legible by observing a minimum size or distance between them;
- The position and shape constraints: absolute position and shape of contours must be maintained as much as possible;
- The structural and topological constraints: spatial relationships between contours and soundings are maintained;
- The functional constraint specific to the purpose of the map: on a nautical chart, functional constraints are the safety constraint indicating that a reported depth cannot be greater than the real depth and the preservation of navigation routes.
2.2. Depth Contours Generalization-Related Work
2.3. Coastline Standards and Constraints Implementation
2.4. Coastline Generalization-Related Work
3. Depth Contours Generalization across Scales
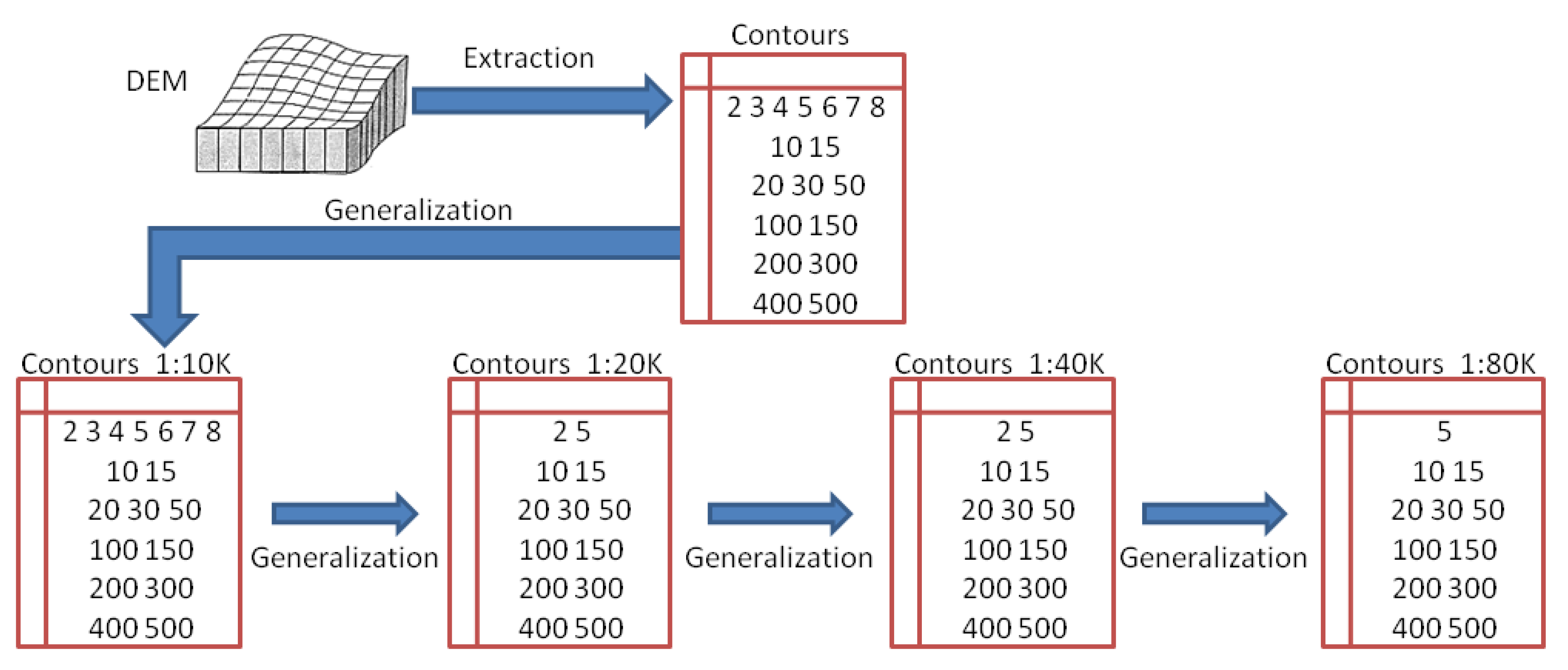
3.1. Depth Contours Generalization Framework
3.2. Depth Contours Generalization Methodology
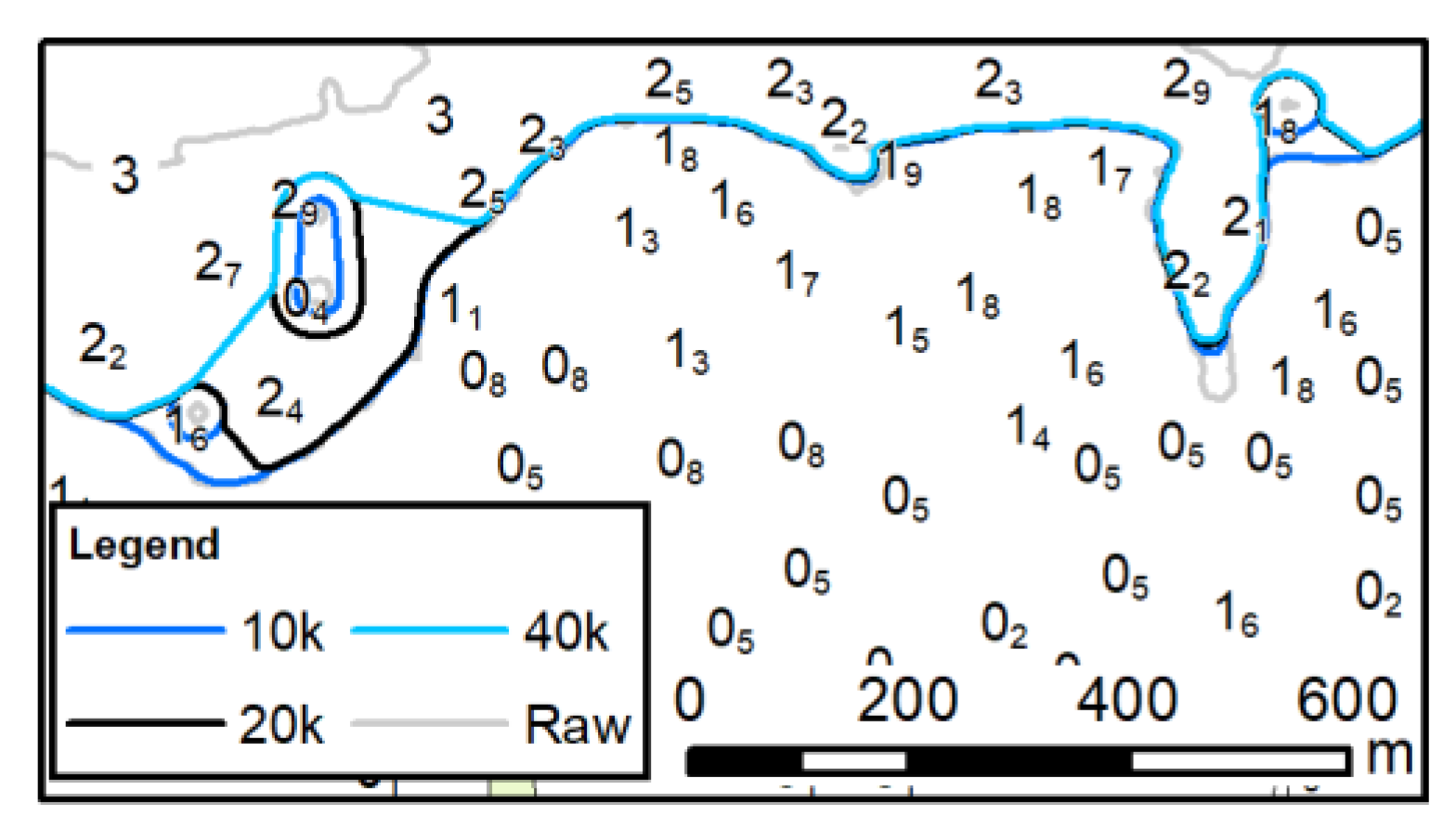
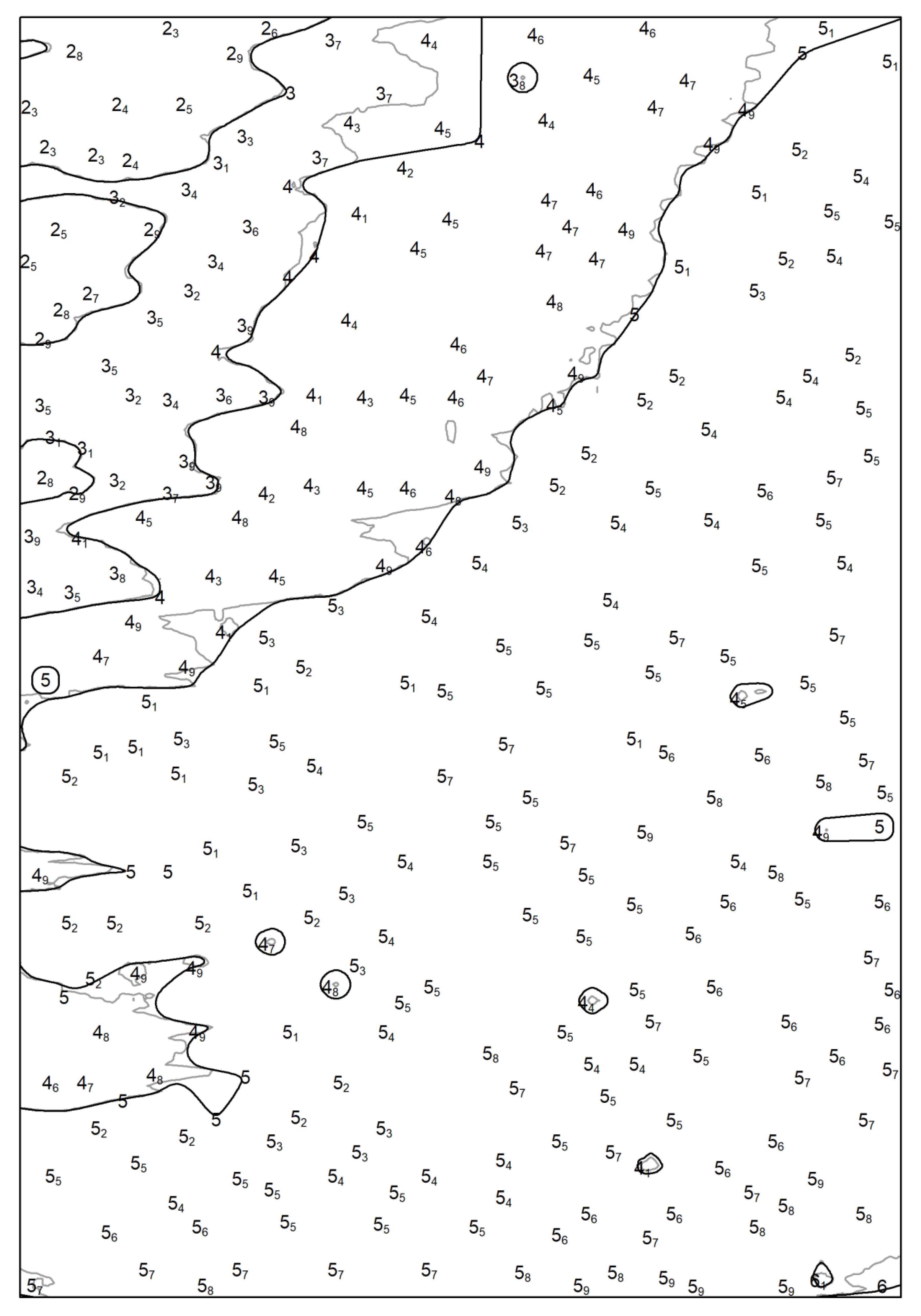
- Those extracted from the DEM need to be generalized for portrayal at the largest scale of the nautical charts series e.g., 1:10 K. Depending on the gridding interpolation method, these contours can seem “jagged”, especially as the morphology of the seafloor changes abruptly. They contain many “island” contours due to local minima and maxima. These artifacts are the result of measurement noise that is present in the MBES or ALB datasets; that is, the variation in depth between two close samples can be different than in reality. The artifact can be observed even after the dataset has been statistically cleaned [1,27].
- Those portrayed at the larger scale of the nautical charts series need to be generalized for portrayal at smaller scales (e.g., 1:20 K for NOAA) according to the ladder approach. In the same way, the 1:20 K scale contours are generalized for portrayal at 1:40 K scale and others.
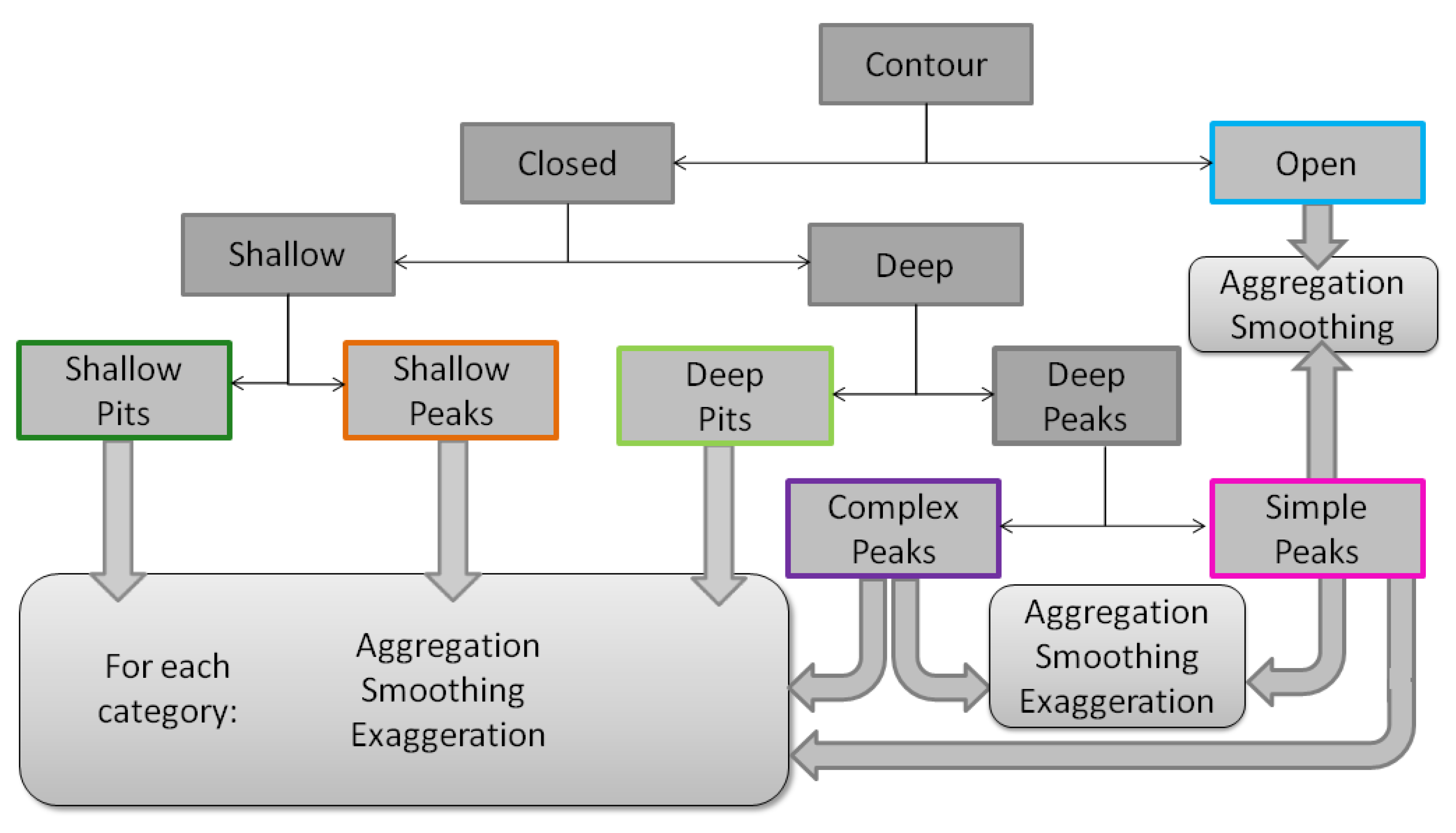
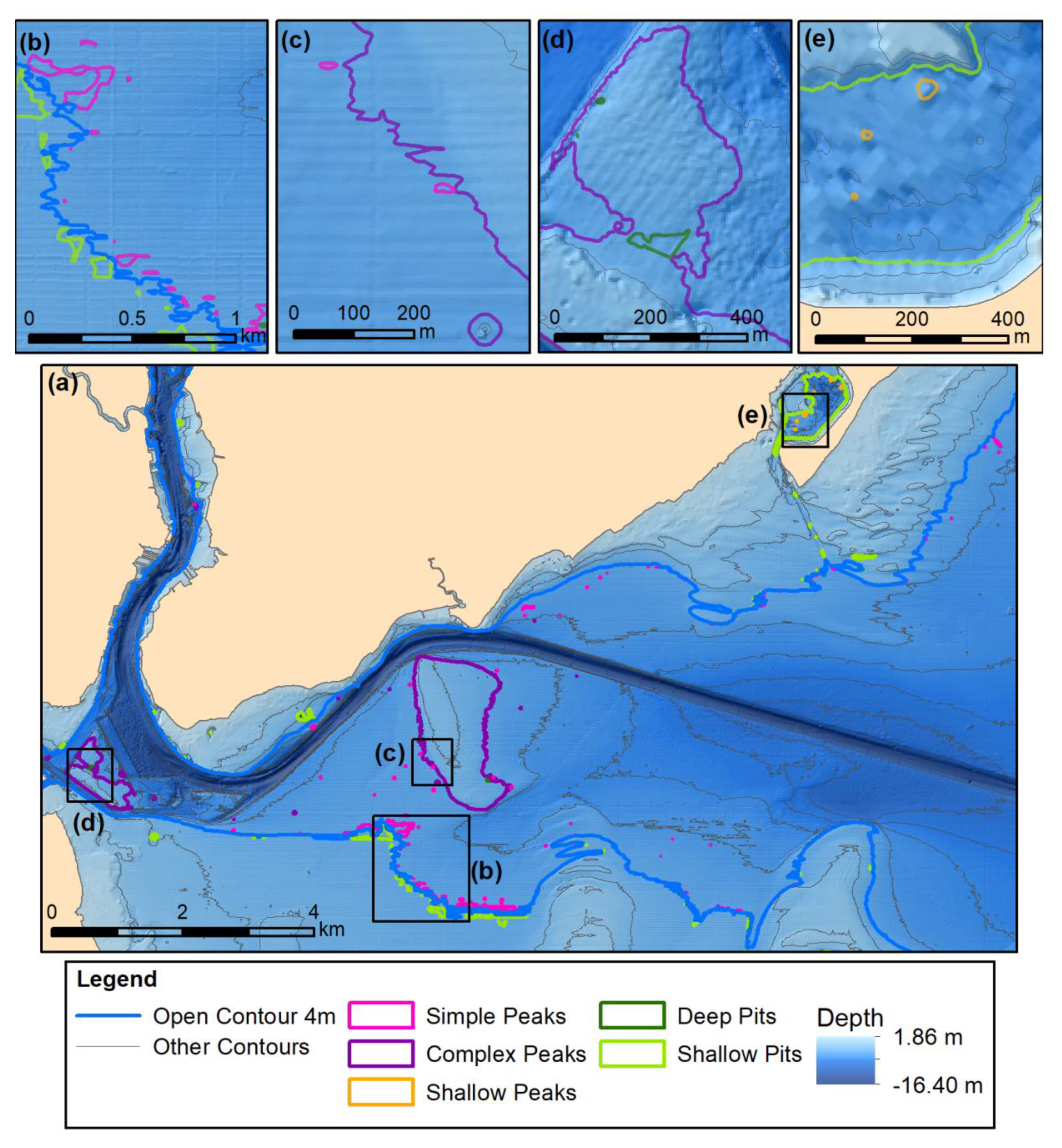
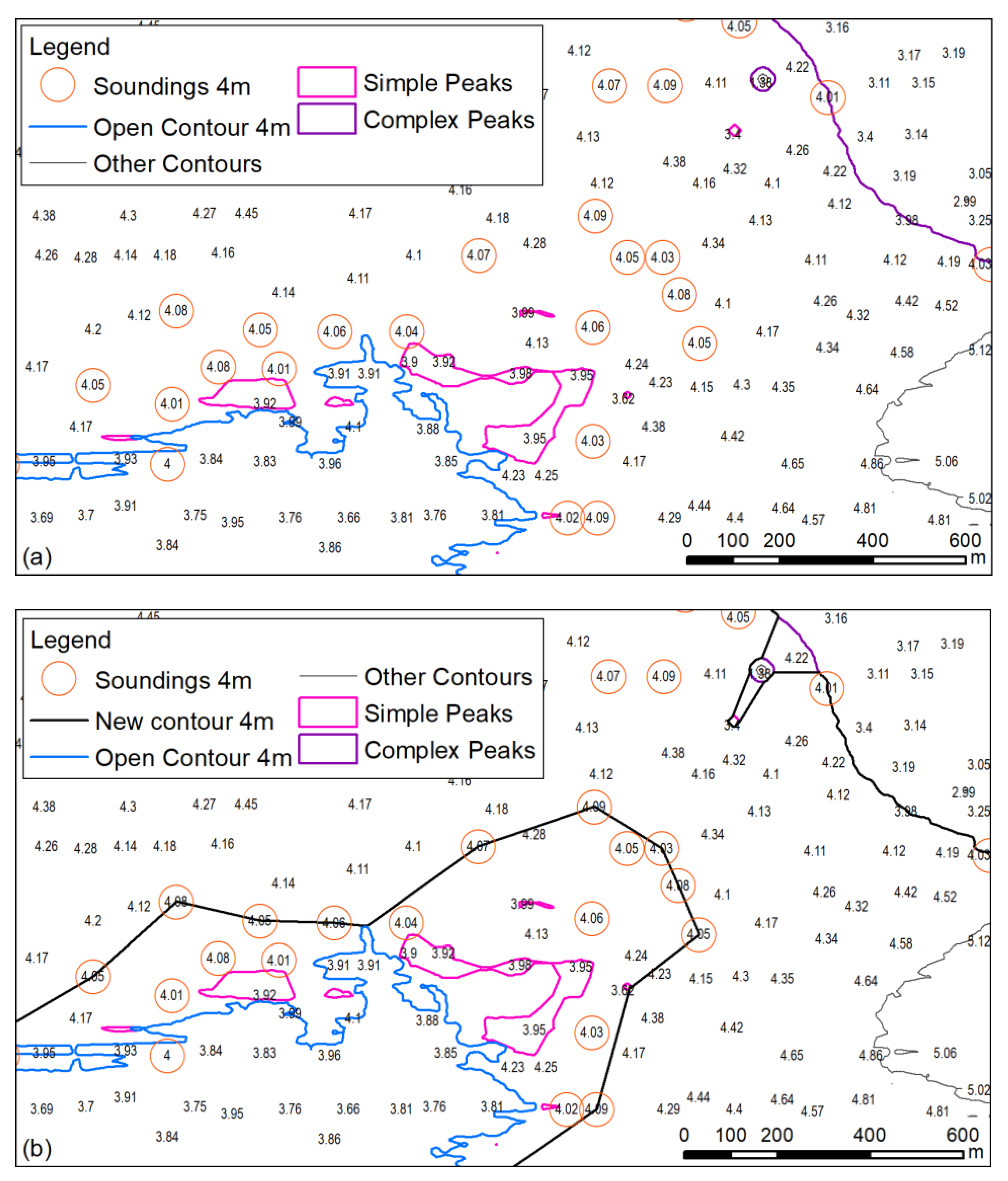
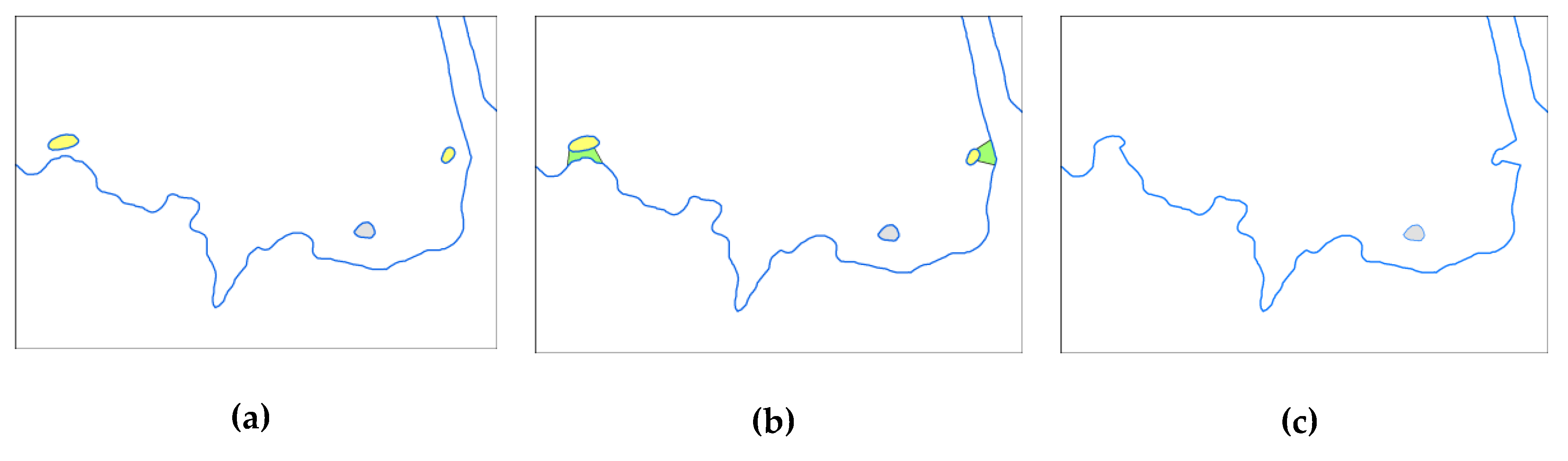
- Simple Peaks located in proximity to Open contour: Some of the Simple Peaks are very close to the Open contour in relation to the chart scale and thus should be aggregated with this contour, moving the Open contour to the deeper area. Only Simple peaks can be aggregated with the Open contour (Figure 3a,b). Aggregation (Figure 4 and Figure 5) and smoothing operators are applied with the double buffering method.
- Simple Peaks located in proximity to Complex Peaks: Simple peaks that are not located close to the Open contours in relation to the chart scale are checked for their proximity with the Complex Peaks (Figure 3a,c). Thus, these Simple Peaks are aggregated with the Complex Peaks (Figure 4 and Figure 5).
- Simple Peaks not in proximity to Open contour or Complex Peaks: Simple peaks that are not located close to the Open contours or Complex Peaks are aggregated if they are in proximity to each other.
- Deep Pits or Shallow pits: Pits located in the shallow or deep area that include soundings are evaluated and aggregated if they are in proximity to each other (Figure 3a,d,e). It is recommended to omit Pits that do not include soundings.
- Shallow Peaks: Shallow Peaks are evaluated and aggregated if they are in proximity to each other (Figure 3a,e).
- Exaggeration of Peaks or Pits that include a sounding: Peaks or Pits that include a sounding should be checked against the minimum area requirement for sounding portrayal. This evaluation ensures that the area available for the depiction of the sounding is adequate. If the area available is not adequate, closed contours need to be expanded using the exaggeration operator (Figure 3 and Figure 4).
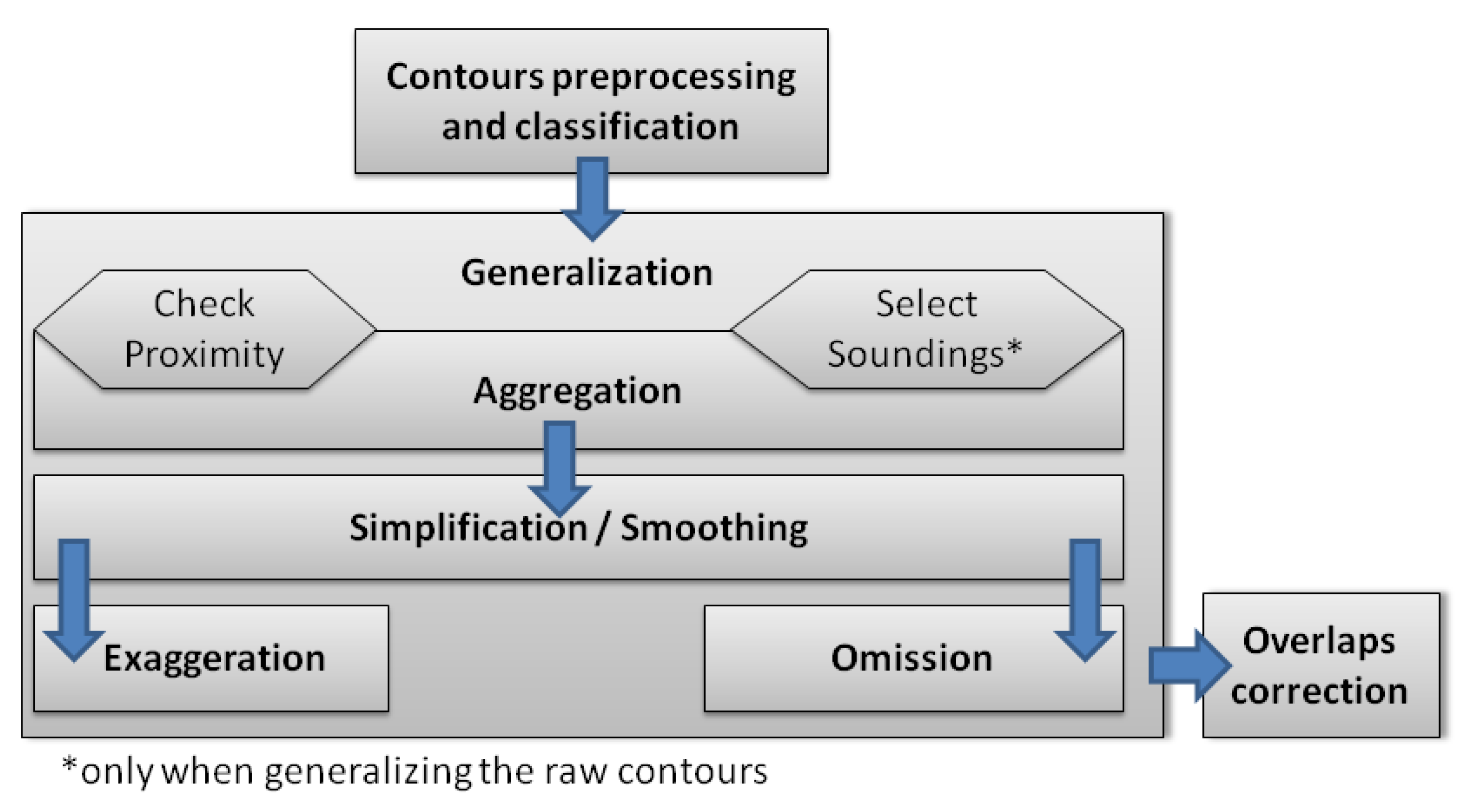
- Contours preprocessing and classification: Identify seabed structure and classify depth contours as explained (see Figure 2).
- Generalization:
- Check proximity between contours to find those that will be aggregated e.g., assess Simple Peaks close to Open depth contour, Simple Peaks close to Complex Peaks etc.
- Select soundings: when generalizing the raw contours for the larger scale i.e., 1:10K locate portrayed soundings with depth equal to the contour value under examination and located close to it.
- Aggregation is applied for the following cases: a. Open Contours, Simple Peaks, b. Complex Peaks, Simple Peaks, c. Simple Peaks, d. Deep Pits, e. Shallow Peaks, f. Shallow Pits. When generalizing the raw contours for the larger scale i.e., 1:10 K soundings are taken into account in the aggregation process.
- Simplify and/or smooth contours resulting from aggregation.
- Exaggerate small closed contours that include a sounding.
- Overlaps correction: delete contours that overlap with dredged areas or the coastline.
4. Coastline Generalization
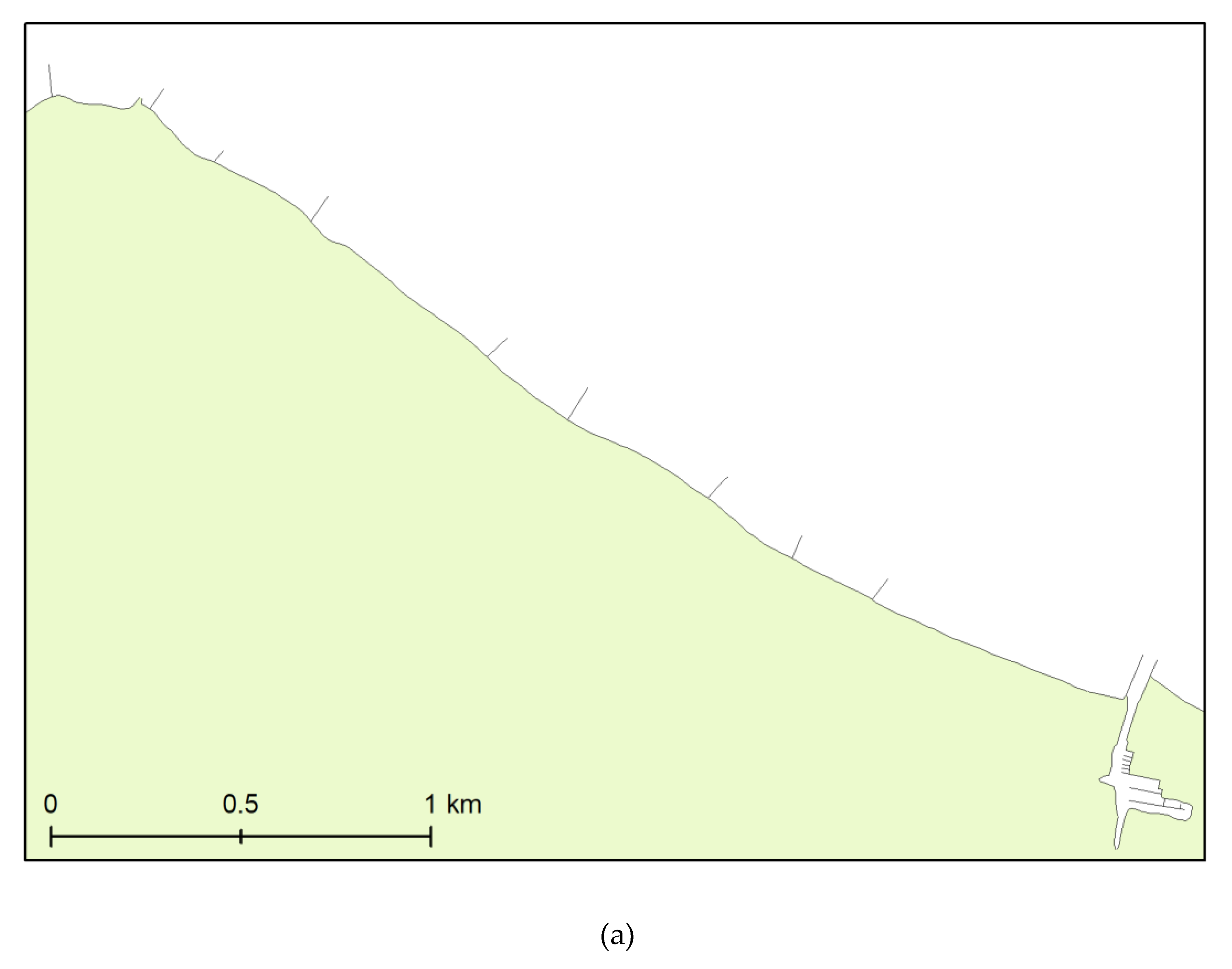
4.1. Natural Coastline
4.2. Artificial Coastline
- The number of segments (removal of nodes that do not represent crossings and/or split lines at crossings);
- The distance of segments from the coastline;
- The number of segments connected with the coastline;
- The azimuth of segments and the change of azimuth between consecutive segments.
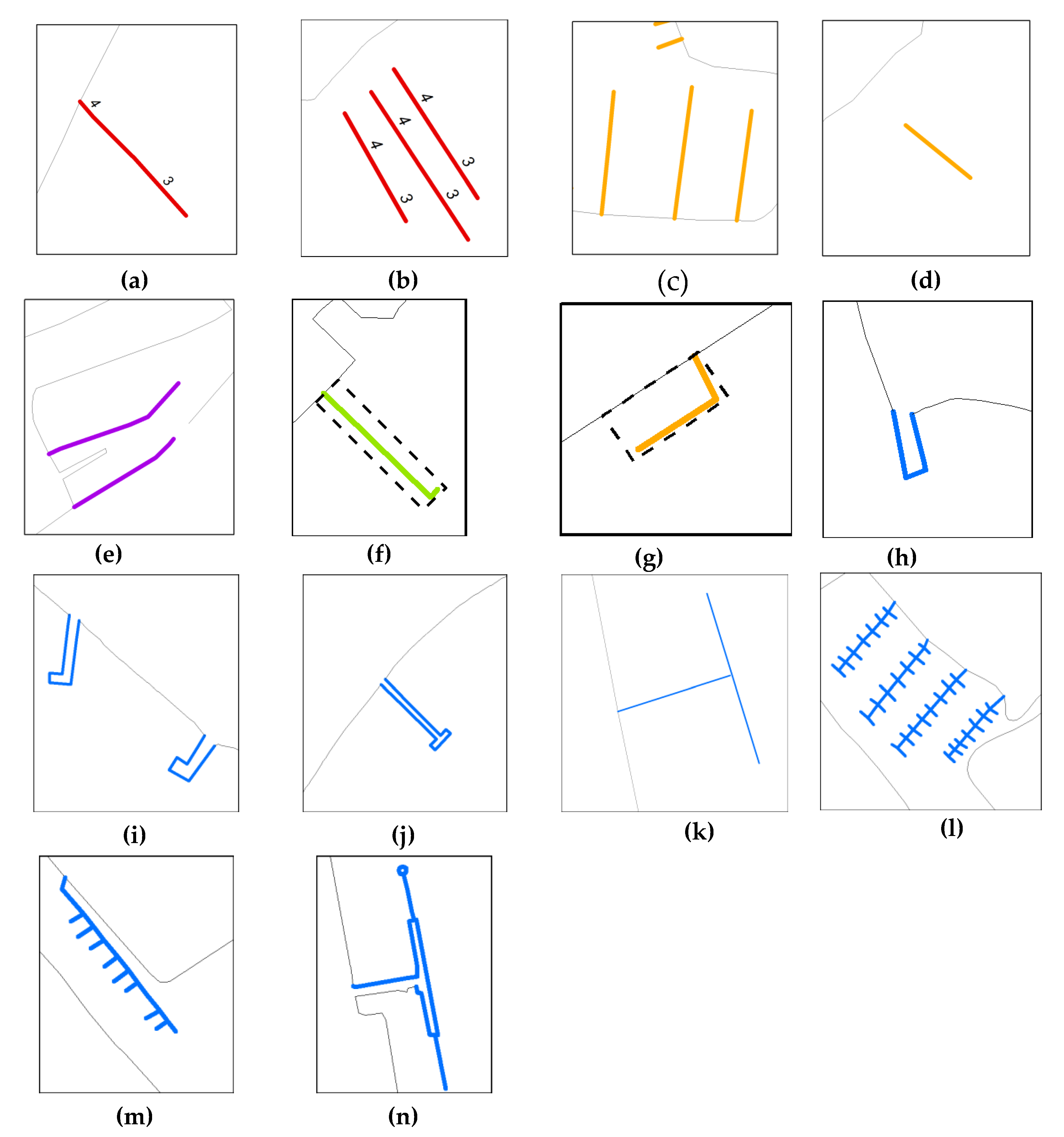
- Identify structures in artificial coastline and classify them based on their shape to key artificial coastline features (Figure 11). This is done automatically based on the above described procedure.
- Apply the appropriate generalization procedure to each artificial coastline structure based on classification and identified properties (e.g., minimum width and minimum length) and tolerances according to nautical chart compilation scale guidelines (Figure 12, Figure 13, Figure 14, Figure 15, Figure 16 and Figure 17).
- Identify vertices along natural coastline that are common with artificial coastline structures that will be portrayed at the compilation scale (Figure 10).
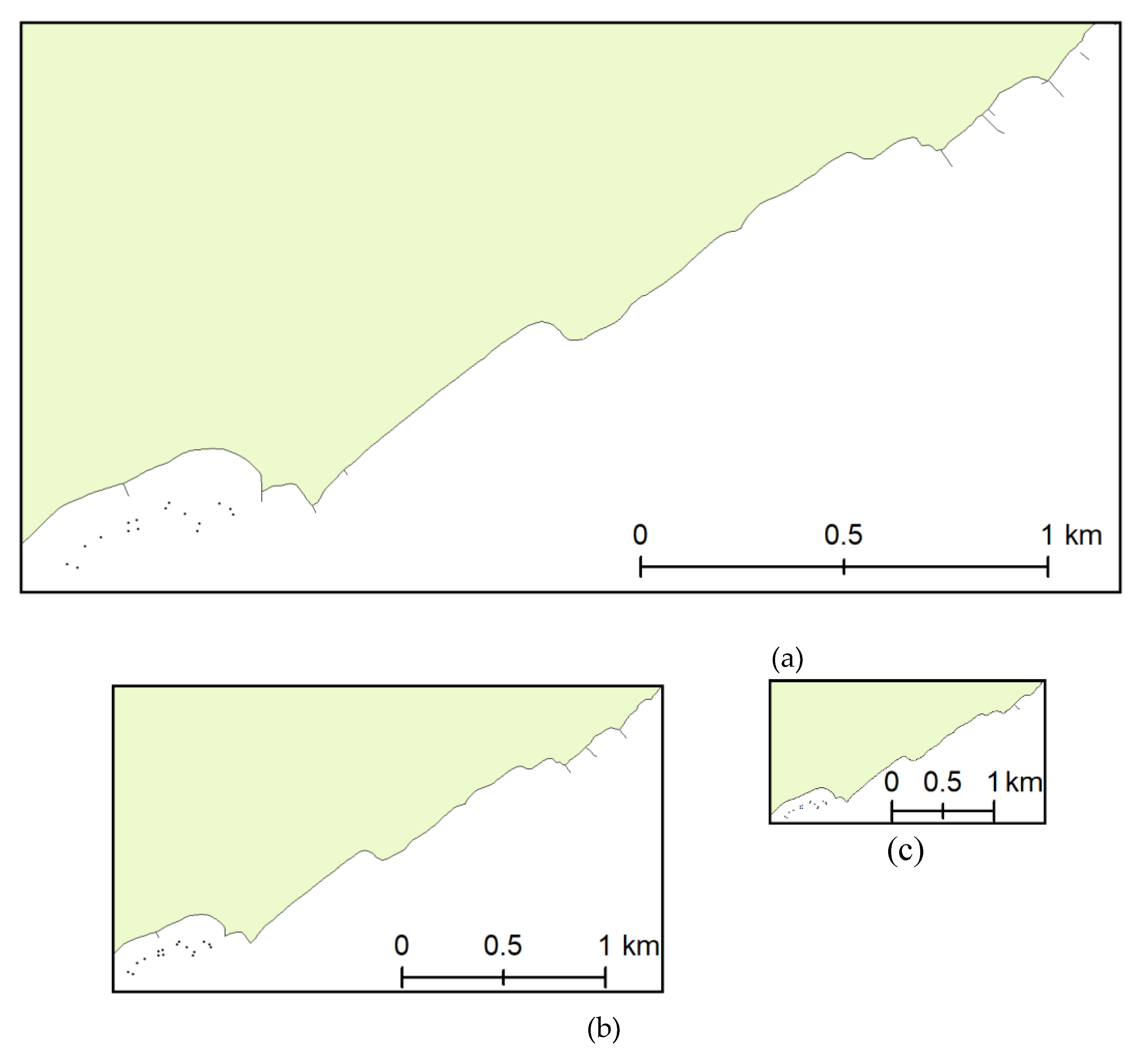
- Simplify natural coastline by removing vertices too close to each other in order to achieve the distance between vertices according to the specifications (taking into account vertices common with artificial coastline that should not be omitted) (Figure 10).
5. Case Study—Results
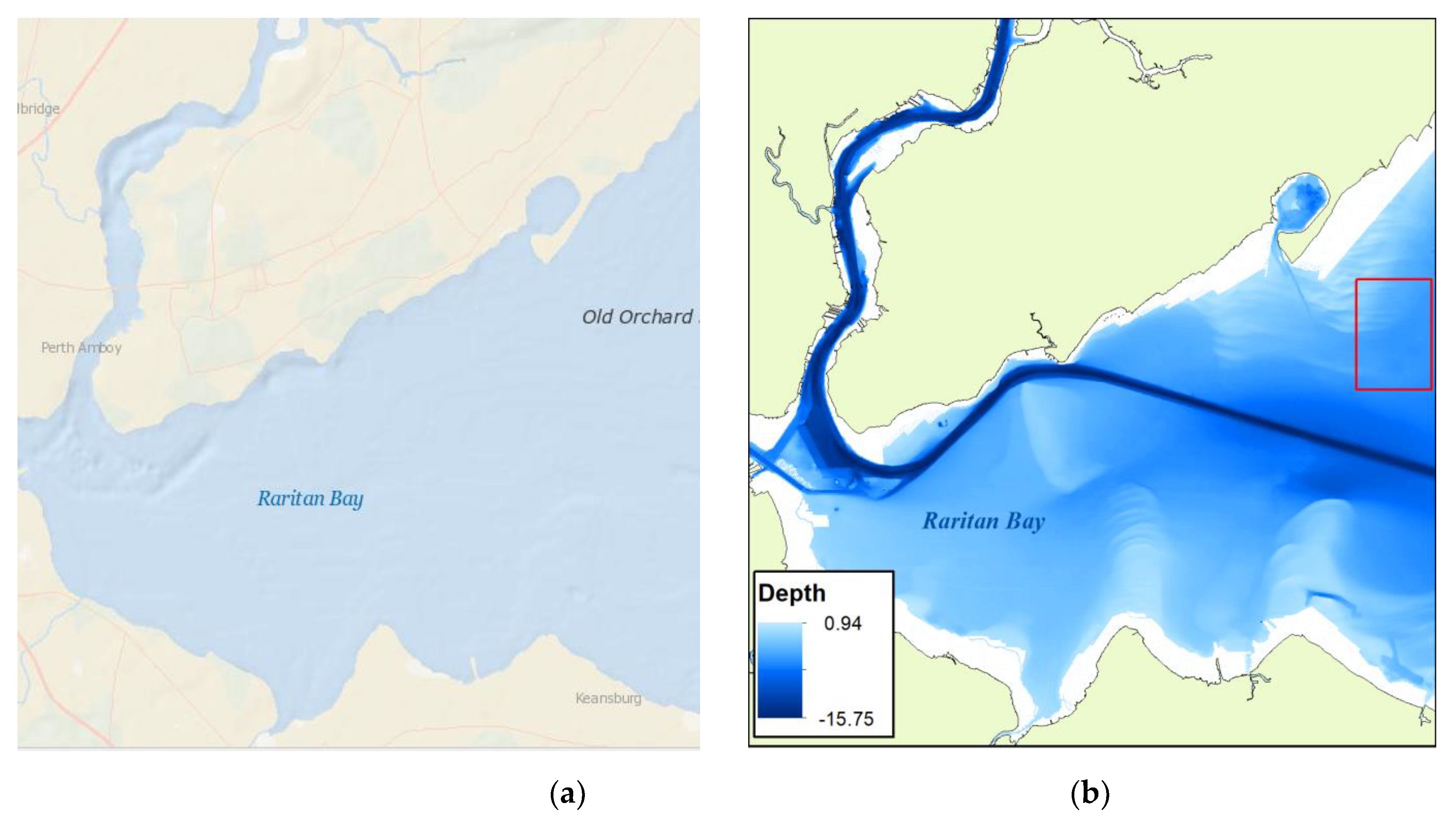
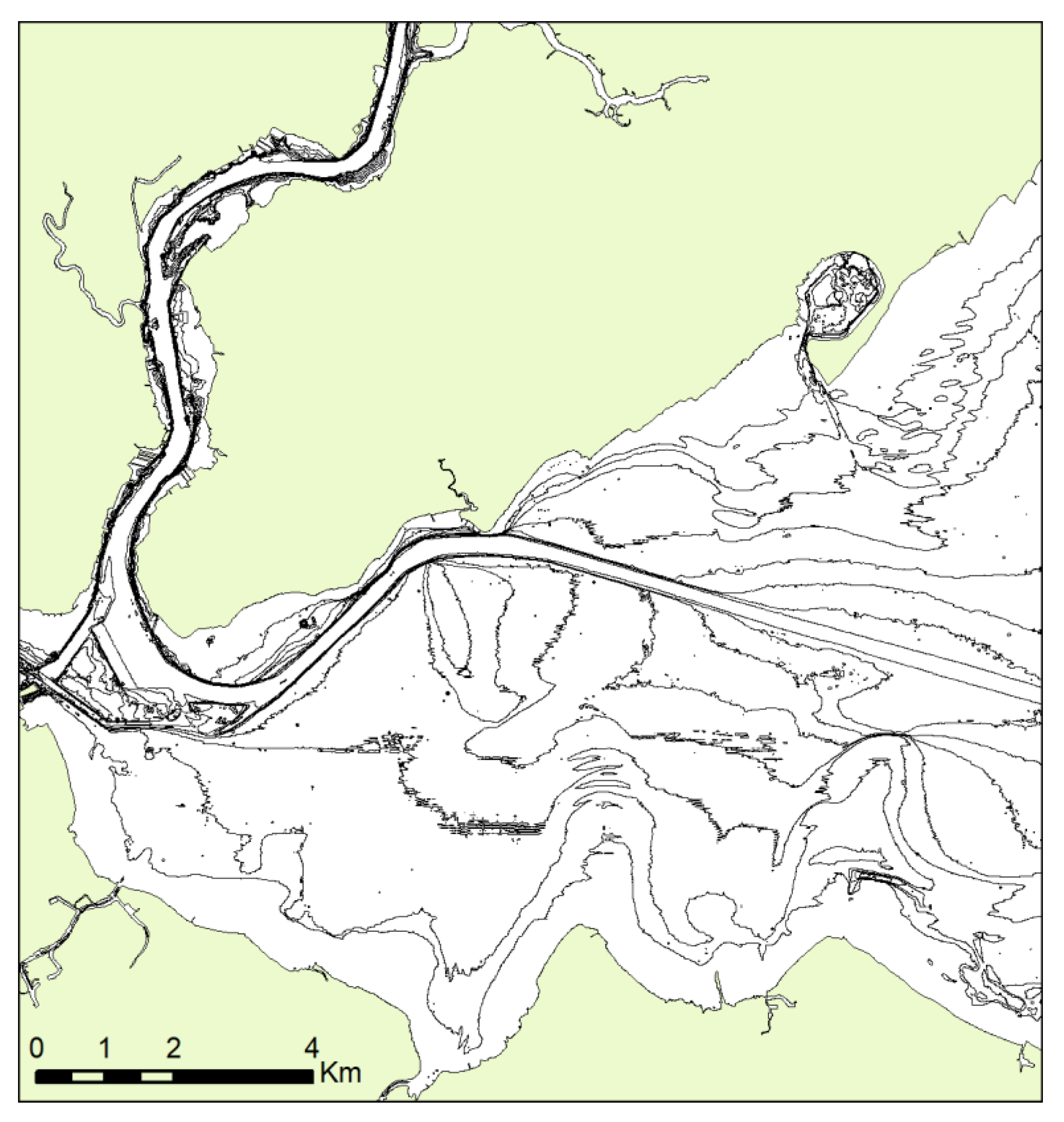
5.1. Study Area and Source Data
5.2. Implementation
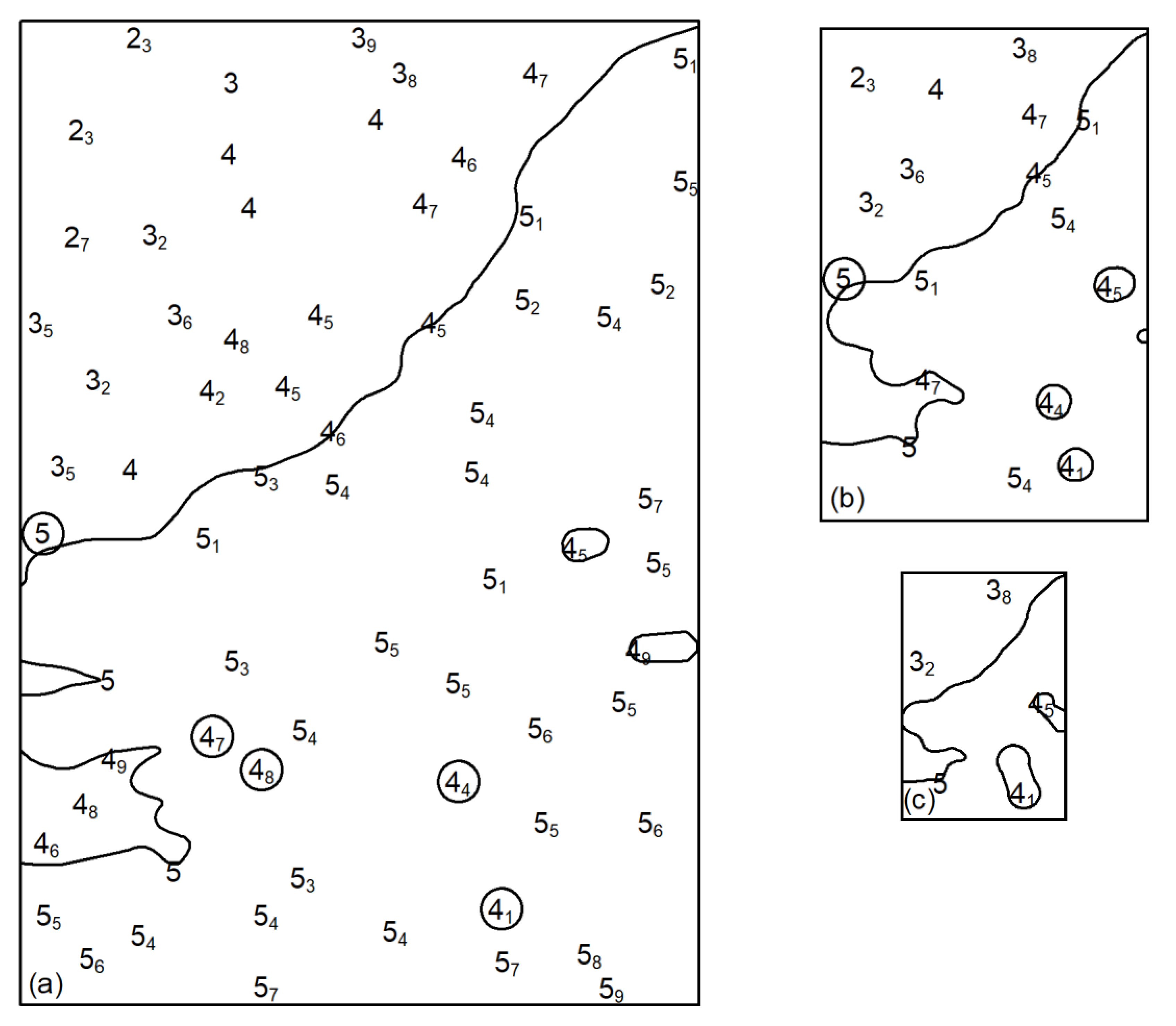
5.3. Results
6. Discussion
- Flexibility and Customization: the values of the parameters used, e.g., distance for aggregation etc. can be set by the cartographer, thus providing a fully parameterized solution. It is considered that a “parametric” approach contributes considerably to the flexibility of the method, accommodates the requirements of different hydrographic institutions, and adapts to seabed morphology and scale.
- Automation: appropriate operators are invoked by the structure and the properties of the depth contours. Appropriate operators for islands are invoked based on their area, dimensions and distance from the mainland shoreline. Specific generalization scenarios are applied to the artificial coastline based on the shape structure identified. User interference is limited to fine tuning of specific operators by setting parameters values.
- GIS environment implementation: due to the implementation in a GIS environment, data encoding is performed according to OGC simple features and methods are implemented with basic GIS tools. As a result, compatibility with IHO encoding standards [4,5,6] is achieved and adoption in any nautical chart production environment is feasible.
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Identification of Vertices and Segments of the Natural Coastline Related to the Artificial Coastline
- Transform natural coastline lines to segments;
- Extract nodes of segments as points and flag the “END” node;
- Compute distance between points resulting from “END” nodes and artificial coastline structures portrayed at compilation scale;
- Flag “END” node with zero distance that should not be deleted and with non—zero distances that can be deleted;
- Transfer this information to natural coastline line segments and as result characterize segments based on “END” node as “can be deleted” or “cannot be deleted”.
Appendix A.2. Island Polygons Creation and Properties Assessment
- Create polygons: convert natural coastline (lines features) that constitute islands into polygons;
- Remove natural features: delete lines that belong to island polygons from the linear natural coastline data set;
- Determine proximity: compute distance from island polygons to the linear coastline
- Bounding box: create the minimum bounding rectangle for each island polygon and record the rectangle dimensions, such as width and length, as attributes to the data.
Appendix A.3. Polygons Generalization
- Land features close to the shoreline are merged to coastline: (a) select polygons with distance less than the limit set by chart scale from the shoreline, (b) aggregate polygons, and (c) create new coastline polygon (Figure 7);
- Retain island polygons: identify polygons that will remain as polygons; select polygons with width and length greater than the appropriate tolerance according to chart scale specifications;
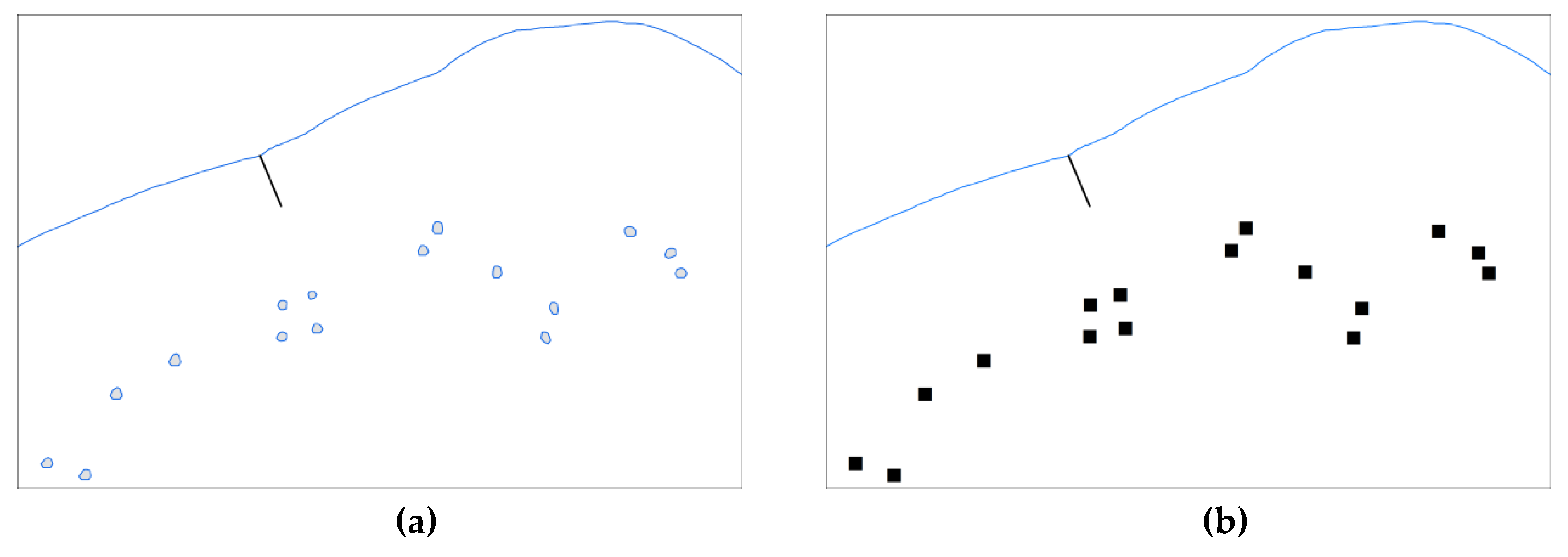
- Collapse islets to points: (a) identify islets (small polygons) that will collapse to points by selecting polygons with width and length shorter than the appropriate tolerance according to chart scale specifications (Figure 8), (b) create points from polygon centroids to replace polygons, and (c) delete lines of those polygons from coastline;
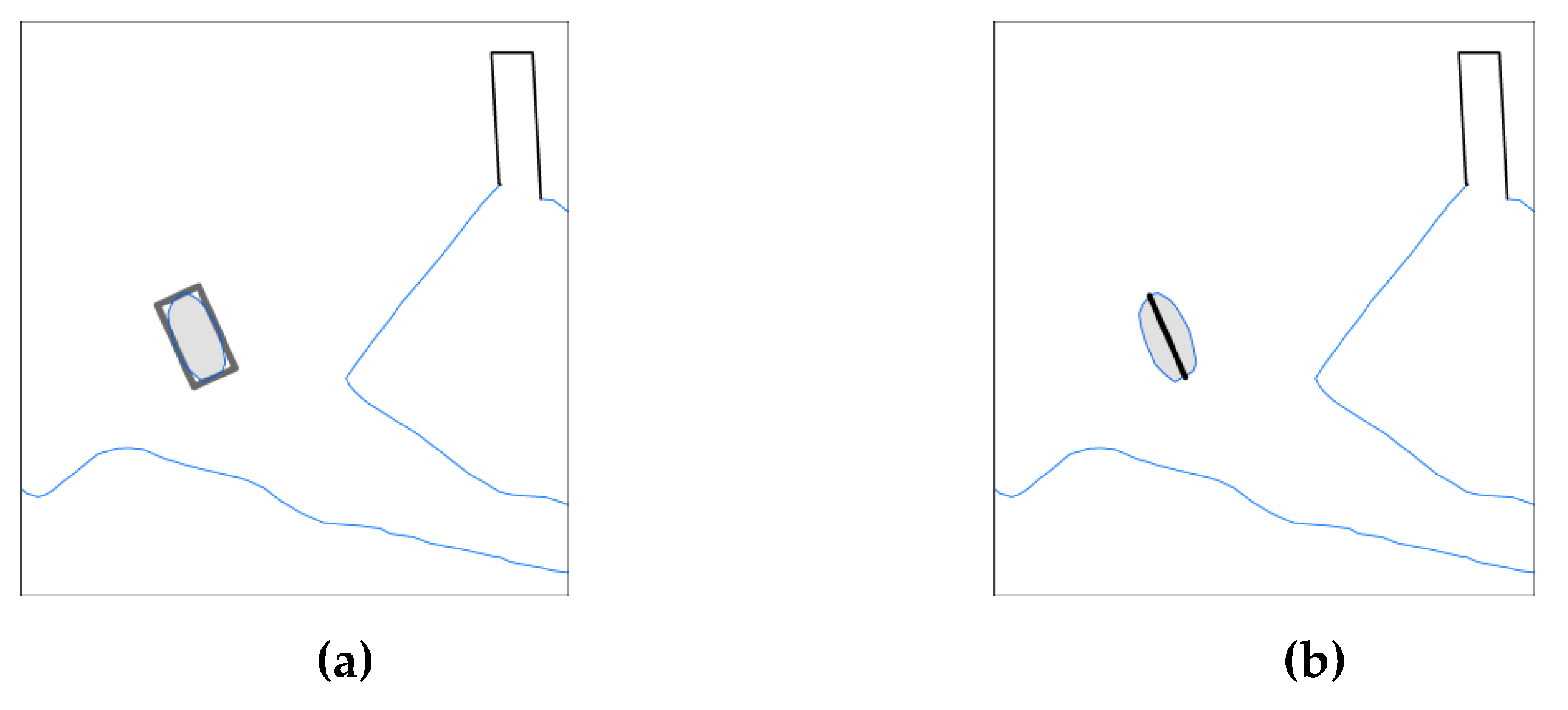
- Collapse elongated islets to lines: (a) identify small elongated polygons that will collapse to lines (Figure 9), (b) transform polygons to dual lines based on their largest dimension, (c) create an axis line from dual lines to replace polygons, and (d) delete lines of those polygons from coastline.
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Artificial Coastline Feature and Shapes | Generalization Practices | Measures and Procedures |
|---|---|---|
| Line transverse and connected to shoreline—segments with different attributes e.g., Watlev (i.e., IHO S-57 Water Level) (Figure 11a) | If Length (distance from coastline) < limit then delete | Minimum Bounding Rectangle (MBR): width very short. One segment in contact with coastline. Use sum of length of segments in MBR for generalization. |
| Line transverse and not connected to shoreline—segments with different attributes (Figure 11b) | If Length (distance from coastline) < limit then delete | MBR: width very short. No segment in contact with coastline. Use sum of length of segments in MBR for generalization. |
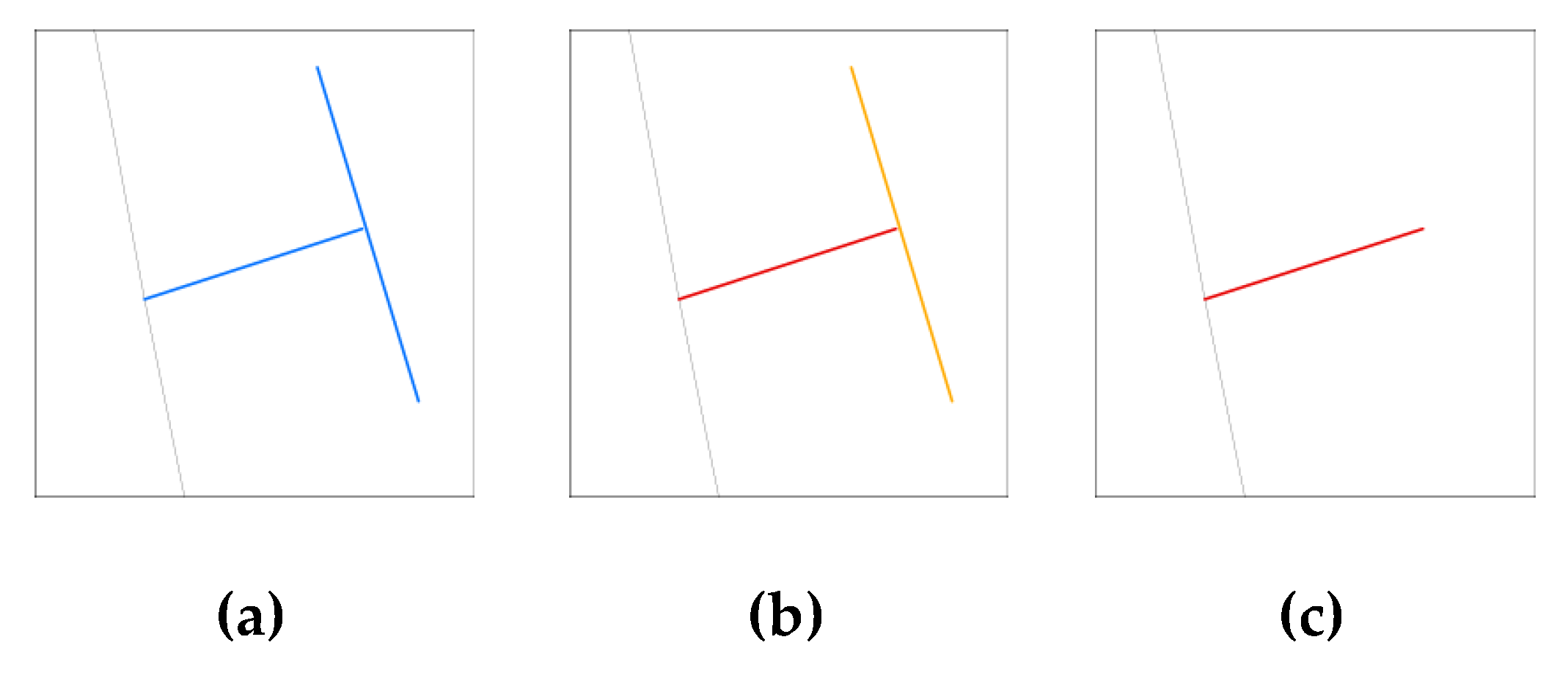
| Line transverse to and connected to shoreline–one segment (Figure 11c) | If Length (distance from coastline) < limit then delete | MBR: width very short. One segment in contact with coastline. Use length of segment in MBR for generalization. |
| Line transverse and not connected to shoreline–one segment (Figure 11d) | If Length (distance from coastline) < limit then delete | MBR: width very short. One segment in contact with coastline. Use length of segment in MBR for generalization. |
| Two segments with obtuse angle (Figure 11e) | If Length (distance from coastline) < limit then delete | MBR: width medium. One segment in contact with coastline. Obtuse angle between segments. Use sum of length of segments in MBR for generalization. |
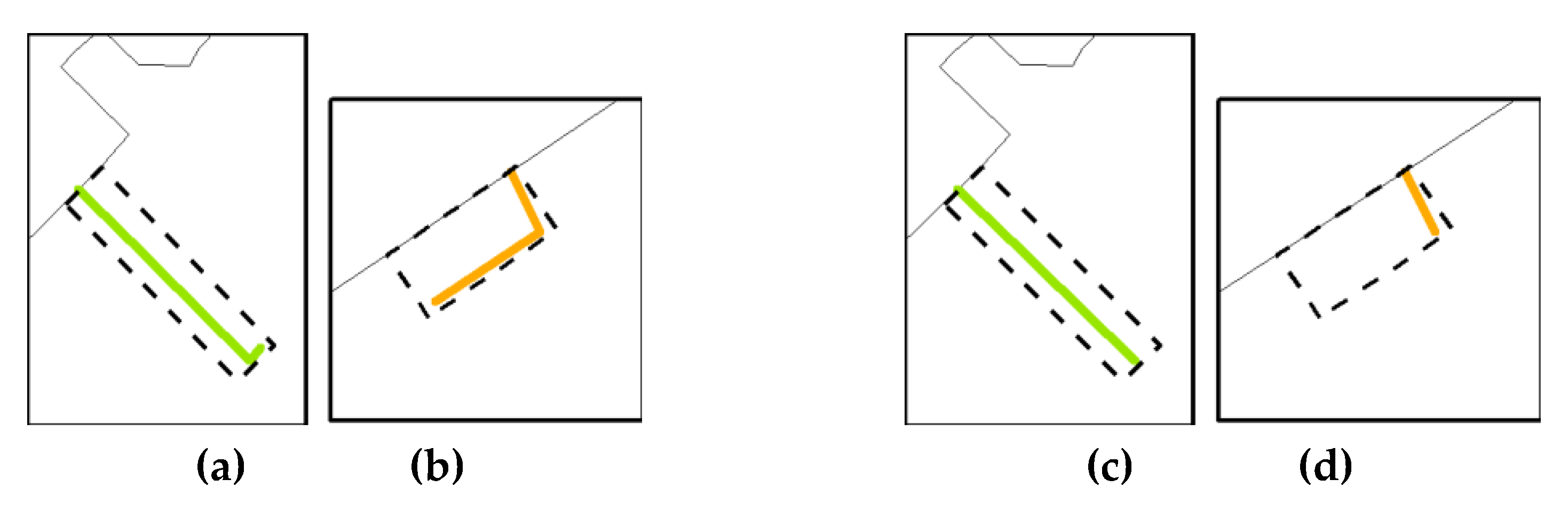
| L shape Portrait e.g., dimension parallel with shoreline smaller than the other (see Figure 11f and Figure 12a,b) L shape Landscape e.g., dimension parallel with shoreline larger than the other (see Figure 11g and Figure 12c,d) | Stage A Portrait: If MBR width < limit transform to single line If single line length (distance from coastline) > limit then portray else delete Landscape: If MBR length < limit transform to single line If single line length (distance from coastline) > limit then portray else delete Stage B If length (distance from coastline) < limit then delete | MBR: width medium or large. One segment in contact with coastline. Almost right angle between segments. Based on the azimuth of segments distinguish the two perpendicular lines and decide on structure orientation (landscape or portrait). For portrait use MBR width and for landscape use MBR length to decide on generalization. (MBR width is always the smaller dimension of the MBR and MBR length is always the larger dimension of the MBR). |
| Pi Shape (see Figure 11h and Figure 13) | Stage A If width < limit then collapse to single line If single line length (distance from coastline) > limit then portray else delete Update natural coastline Stage B If length (distance from coastline) < limit then delete | MBR: width medium. Can be drawn with one line. Two segments in contact with coastline. Based on azimuth of segments identify the lines transverse to the shoreline. Calculate the maximum and the minimum length of the line segments transverse to the coastline. Identify the minimum and the maximum line segments transverse to the coastline. Compute the distance between the maximum and the minimum transverse segments. This distance is the width that is critical for generalization. Identify the Pi Shape structure based on the fact there are only two transverse line segments. From the maximum transverse line create a new structure that will replace the original Pi Shape, when the width of the structure is too short according to the map scale specifications. Find natural coastline segments that are connected to the transverse lines. Extend the natural coastline segment associated with the minimum transverse line to the natural coastline segment associated with the maximum transverse line |
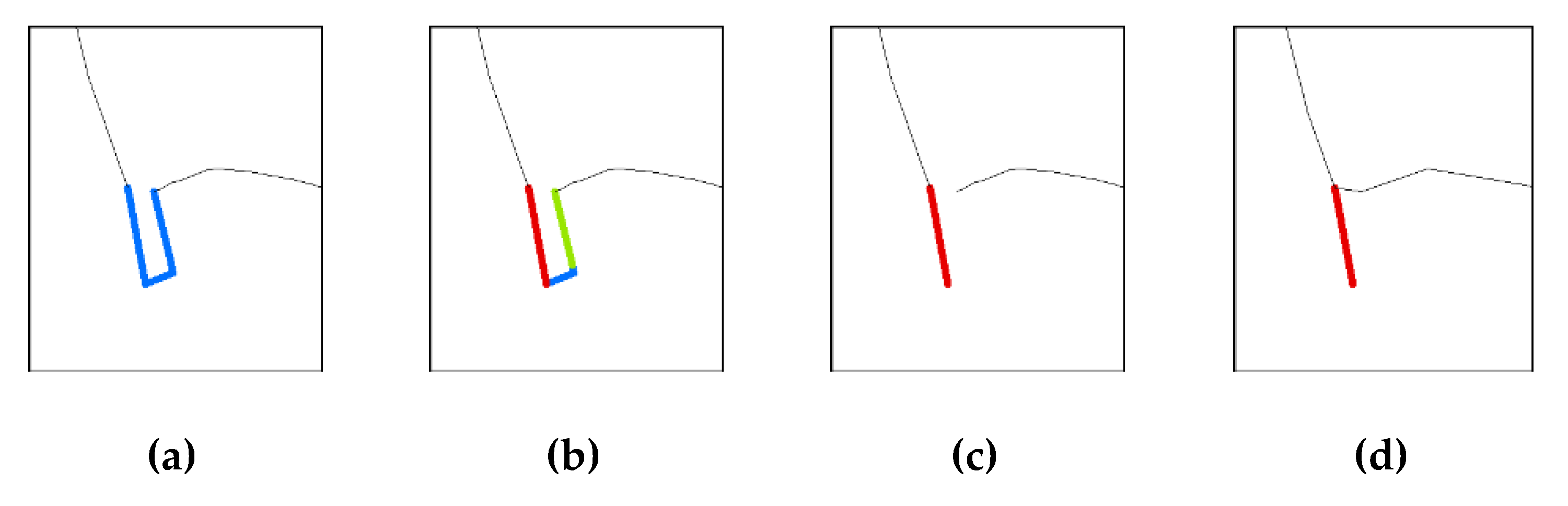
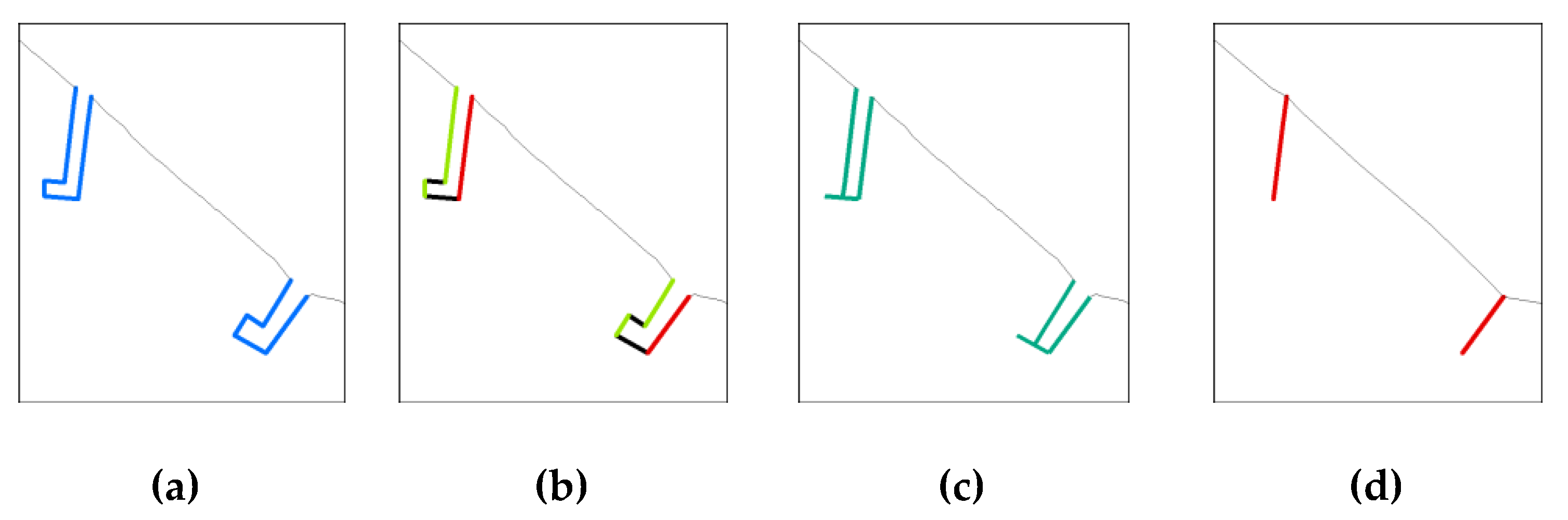
| Boot Shape (see Figure 11i and Figure 14) or T Shape (see Figure 11j and Figure 15) | Stage A If minimum transverse line length < limit then collapse this part to single line. If distance between transverse lines (width) < limit then collapse this part to single line. If single line length (distance form coastline) > limit then portray else delete Update natural coastline Stage B If length (distance from coastline) < limit then delete | MBR: width medium. Can be drawn with one line. Two segments in contact with coastline Based on azimuth of segments identify the lines transverse and parallel to the shoreline. Calculate the maximum length and the minimum length of the line segments transverse to the coastline. The minimum transverse line length is critical for the generalization. Compute the distance between the maximum and the next to minimum transverse segment. This distance (width) is critical for the generalization. Identify Boot Shape or T Shape structures based on the fact that there are more than one transverse segments that are smaller than the maximum value e.g., 2 (boot shape) or 3 (T Shape). Identify the minimum transverse segment (s), the maximum transverse segment, and the intermediate. Identify the maximum segment parallel to the shoreline (cup). When the minimum transverse segment is considered too small (<0.3 mm), then keep the maximum transverse line and the maximum of the transverse segments smaller than the maximum. Extend these segments up to the cup of the structure to create a new generalized structure. From the transverse line with the maximum length create a new structure that will replace the generalized structure when the width of the structure is too small according to the map scale specifications. Connect the natural coastline segment associated with the minimum length line with the natural coastline segment associated with the maximum length line |
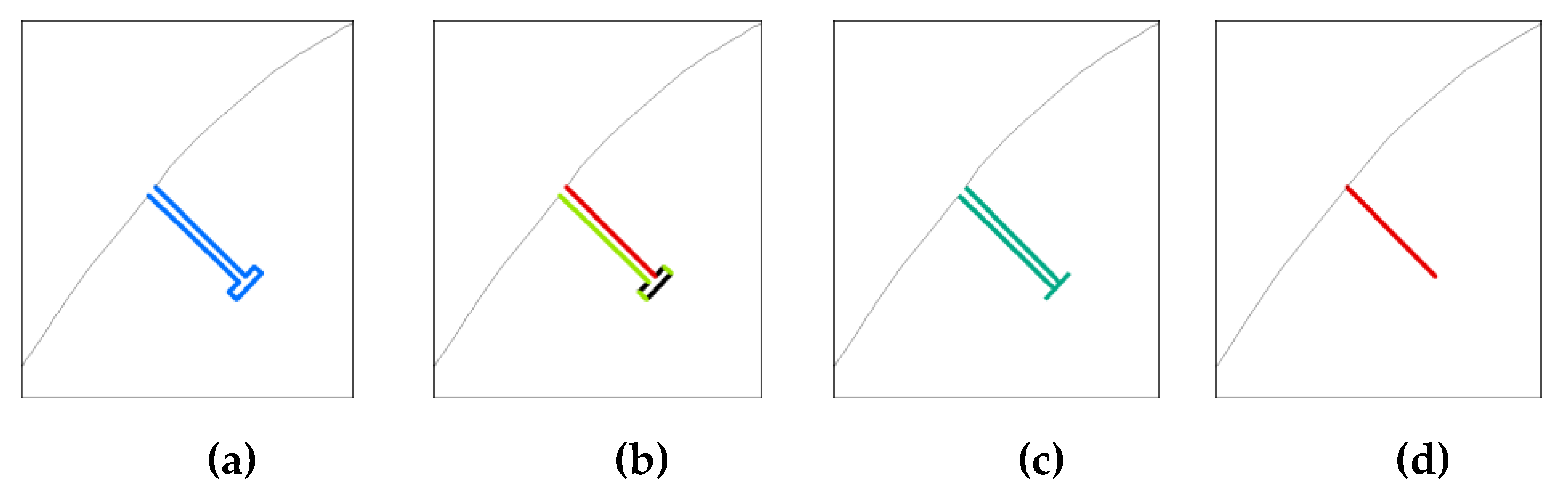
| T Shape (no width) (see Figure 11k and Figure 16) | Stage A If width (cap) < limit then collapse to single line (axis) If single line (axis) length (distance from coastline) > limit then portray else delete Stage B If length (distance from coastline) < limit then delete | MBR: medium width. Cannot be drawn with one line. One segment in contact with coastline. Based on the segments azimuth, distinguish the line perpendicular to the shoreline (axis) and the line parallel to the shoreline (cap). Use cap width to decide on size in order to invoke collapse. From the perpendicular line (axis) create a new structure that will replace the original T shape. Delete the line parallel to the shoreline (cap). |
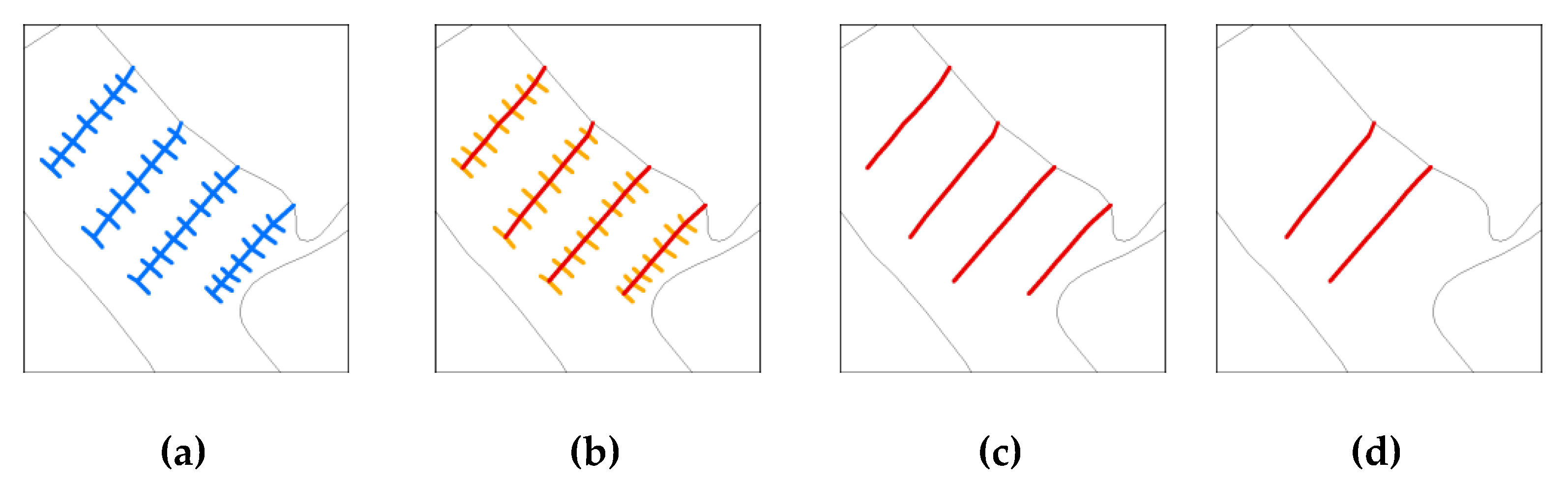
| Antenna Portrait shape (see Figure 11l and Figure 17) | Stage A If width (cap) < limit then collapse to single line (axis) If single line (axis) length (distance from coastline) > limit then portray else delete Stage B If length (distance from coastline) < limit then delete | MBR: medium width. Cannot be drawn with one line. One segment in contact with coastline Based on the segments azimuth, distinguish the line transverse to the shoreline (axis) and the lines parallel with the shoreline (caps). Use cap width to decide on size in order to invoke collapse. From the transverse line (axis) create a new structure that will replace the original T shape. Delete the line parallel to the shoreline (cap) |
| Antenna Landscape shape (see Figure 11m) and Complex cases (see Figure 11n) | If distance from coastline < limit then delete | Due to difficulty in distinguishing the two main directions in the Antenna Landscape structure, only the distance from shoreline parameter can be applied. |
Appendix C. Contours Generalization Procedure as Applied in the Case Study Utilizing ArcGIS Geoprocessing Tools
- Creation of a new full coverage DEM: gaps in the dataset are filled as described earlier utilizing the “Create TIN” tool. The new DEM is converted to a point cloud and projected to the chart coordinate reference system.
- Contours preprocessing and classification: specific depth contours are extracted from the full coverage DEM according to chart specifications. Depth contours are enriched with additional information needed for the next steps and classified (Figure 2).
- Aggregation and smoothing of open depth contours, neighboring simple peaks and related integer soundings: the double-buffering method is applied with a custom Model Builder model utilizing the “Buffer tool” and other geo-processing tools.
- Aggregation of (a) complex contours, neighboring peaks and related integer soundings or (b) neighboring closed contours from the same category and related integer soundings: a custom tool based on the “Aggregate Polygons” tool is applied. Selected soundings are converted to small polygons with the buffer tool in order to be utilized in the “Aggregate Polygons” tool. Other nautical chart features are used as aggregation barriers in order to avoid overlaps.
- Smoothing: this is performed with the PAEK (polynomial approximation with exponential kernel) algorithm. Smoothing tolerance is set by the user in relation to nautical chart scale and line granularity.
- Exaggeration: based on the “Buffer” tool, closed contours may be enlarged in order to accommodate the portrayal of the required sounding value.
- Omission: based on the “Select” tool, features can be selected according to their characteristics and the “Delete” tool is used for their omission.
- Overlaps correction: based on the “Erase” tool, contours are “erased” by dredged areas polygons in order to delete overlapping lines and polygons. The same procedure is applied to resolve overlaps with the coastline.
| 1:10 K | 1:20 K | 1: 40 K | 1:80 K | |
|---|---|---|---|---|
| Contours and soundings aggregation | 30–300 | |||
| Contours aggregation of | 60 | 120 | 240 | |
| Double Buffering | 10–30 | 15 | 15 | 120 |
| Simplification Polynomial Approximation with Exponential Kernel (PAEK) | 50–70 | 100 | - | - |
| Exaggeration: minimum width for closed contours | 30 | 60 | 120 | 240 |
References
- Peters, R.; LeDoux, H.; Meijers, M. A Voronoi-based approach to generating depth-contours for hydrographic charts. Mar. Geod. 2014, 37, 145–166. [Google Scholar] [CrossRef] [Green Version]
- White, S.A.; Parrish, C.E.; Calder, B.R.; Pe’Eri, S.; Rzhanov, Y. LIDAR-derived national shoreline: Empirical and stochastic uncertainty analyses. J. Coast. Res. 2011, 62, 62–74. [Google Scholar] [CrossRef]
- NOAA Shoreline Website. NOAA Continually Updated Shoreline Product (CUSP). Available online: https://shoreline.noaa.gov/data/datasheets/cusp.html (accessed on 15 October 2020).
- IHO (International Hydrographic Organization). Regulations of the IHO for International (INT) Charts and Chart Specifications of the IHO, 4.7.0 ed.; Publication S-4; International Hydrographic Organization: Monte Carlo, Monaco, 2017; p. 452. [Google Scholar]
- IHO (International Hydrographic Organization). IHO Transfer Standard for Digital Hydrographic Data, 3.1 ed.; S-57 Publication; IHO: Monte Carlo, Monaco, 2000. [Google Scholar]
- IHO (International Hydrographic Organization). Enc Validation Checks, 6.1.0 ed.; S-58 Publication; International Hydrographic Organization: Monte Carlo, Monaco, 2018. [Google Scholar]
- Skopeliti, A.; Stamou, L.; Tsoulos, L.; Pe’Eri, S. Generalization of soundings across scales: From DTM to harbour and approach nautical charts. ISPRS Int. J. Geoinf. 2020, 9, 693. [Google Scholar] [CrossRef]
- Guilbert, E.; Zhang, X. Generalisation of submarine features on nautical charts. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-2, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Beard, K. Constraints on rule formation. In Map Generalization: Making Rules for Knowledge Representation; Buttenfield, B., McMaster, R.B., Eds.; Longman Scientific & Technical: London, UK, 1991; pp. 121–135. [Google Scholar]
- Ruas, A.; Plazanet, C. Strategies for automated generalization. In Advances in GIS research II, Proceedings of the 7th International Symposium on Spatial Data Handling, Delft, The Netherlands, 12–16 August 1996; Kraak, M., Molenaar, M., Fendel, E., Eds.; Taylor & Francis: London, UK, 1997; pp. 319–336. [Google Scholar]
- NOAA (National Oceanic and Atmospheric Administration). Nautical Chart Manual; Version 2018.2; U.S. Department of Commerce, Office of Coast Survey: Silver Spring, MD, USA, 2018; Volume 1.
- Nyberg, N.; Pe’eri, S.; Catoire, S.; Harmon, C. An overview of the NOAA ENC Re-Scheming Plan. Int. Hydrogr. Rev. 2021, 22, 7–21. [Google Scholar]
- Miao, D. Gradual Generalization of Nautical Chart Contours with a B-Spline Snake Method. Master’s Thesis, University of New Hampshire, Durham, NH, USA, 2014; p. 135. [Google Scholar]
- Guilbert, E. Multi-level representation of terrain features on a contour map. GeoInformatica 2012, 17, 301–324. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Guilbert, E. A multi-agent system approach for feature-driven generalization of isobathymetric line. In Advances in Cartography and GIScience; Springer: Berlin/Heidelberg, Germany, 2011; Volume 1, pp. 477–495. [Google Scholar]
- Guilbert, E. Feature-driven generalization of isobaths on nautical charts: A multi-agent system approach. Trans. GIS 2015, 20, 126–143. [Google Scholar] [CrossRef] [Green Version]
- Smith, S.M.; Alexander, L.; Armstrong, A.A. The navigation surface: A new database approach to creating multiple products from high-density surveys. Int. Hydrogr. Rev. 2002, 3, 2–16. [Google Scholar]
- Guilbert, E.; Lin, H. B-spline curve smoothing under position constraints for line generalisation. In Proceedings of the Fourteenth International Symposium on Advances in Geographic Information Systems, Arlington, VA, USA, 2006; pp. 3–10. [Google Scholar]
- Guilbert, E.; Saux, E. Cartographic generalisation of lines based on B-spline snake model. Int. J. Geogr. Inf. Sci. 2008, 22, 847–870. [Google Scholar] [CrossRef]
- Miao, D.; Calder, B. Gradual generalization of nautical chart contours with a cubic B-spline snake model. IEEE Oceans. 2013, 863, 1–7. [Google Scholar] [CrossRef]
- NOAA (National Oceanic and Atmospheric Administration). Rescheme Cook Book; Version 1.0.0; Pe’eri, S., Bartlett, M., Ence, C., Gomez, G., Castillo, J., Auclert, G., Chauvet, P., Eds.; National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2019; p. 195.
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef] [Green Version]
- de Berg, M.; van Kreveld, M.; Schirra, S. Topologically correct subdivision simplification using the bandwidth criterion. Cartogr. Geogr. Inf. Syst. 1998, 25, 243–257. [Google Scholar] [CrossRef]
- Li, Z.; Openshaw, S. Algorithms for automated line generalization1based on a natural principle of objective generalization. Int. J. Geogr. Inf. Syst. 1992, 6, 373–389. [Google Scholar] [CrossRef]
- Wang, Z.; Müller, J.-C. Line generalization based on analysis of shape characteristics. Cartogr. Geogr. Inf. Syst. 1998, 25, 3–15. [Google Scholar] [CrossRef]
- IHO (International Hydrographic Organization). Electronic Navigational Chart, Version 4.0.0, 1.0.0 ed.; Publication S 101; International Hydrographic Organization: Monte Carlo, Monaco, 2018; p. 86. [Google Scholar]
- Calder, B.R.; Mayer, L.A. Automatic processing of high-rate, high-density multibeam echosounder data. Geochem. Geophys. Geosyst. 2003, 4. [Google Scholar] [CrossRef]
- NOAA. Chart 12327. New York Harbor (1:40,000), 109th ed.; NOAA: Silver Spring, MD, USA, 2020.
- Rice, G.; Wyllie, K.; Brennan, R.; Koprowski, C.; Wolfskehl, S.; Burnett, Z. The National Bathymetric Source. In Proceedings of the Canadian Hydrographic Conference 2020, Quebec City, QC, Canada, 24–27 February 2020; Available online: https://hydrography.ca/wp-content/uploads/2020/04/29_Rice_CHC2020_The_National_Bathymetric_Source.pdf (accessed on 28 February 2021).
- Ai, T.; Zhou, Q.; Zhang, X.; Huang, Y.; Zhou, M. A simplification of ria coastline with geomorphologic characteristics pre-served. Mar. Geod. 2014, 37, 167–186. [Google Scholar] [CrossRef]

























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skopeliti, A.; Tsoulos, L.; Pe’eri, S. Depth Contours and Coastline Generalization for Harbour and Approach Nautical Charts. ISPRS Int. J. Geo-Inf. 2021, 10, 197. https://doi.org/10.3390/ijgi10040197
Skopeliti A, Tsoulos L, Pe’eri S. Depth Contours and Coastline Generalization for Harbour and Approach Nautical Charts. ISPRS International Journal of Geo-Information. 2021; 10(4):197. https://doi.org/10.3390/ijgi10040197
Chicago/Turabian StyleSkopeliti, Andriani, Lysandros Tsoulos, and Shachak Pe’eri. 2021. "Depth Contours and Coastline Generalization for Harbour and Approach Nautical Charts" ISPRS International Journal of Geo-Information 10, no. 4: 197. https://doi.org/10.3390/ijgi10040197
APA StyleSkopeliti, A., Tsoulos, L., & Pe’eri, S. (2021). Depth Contours and Coastline Generalization for Harbour and Approach Nautical Charts. ISPRS International Journal of Geo-Information, 10(4), 197. https://doi.org/10.3390/ijgi10040197