
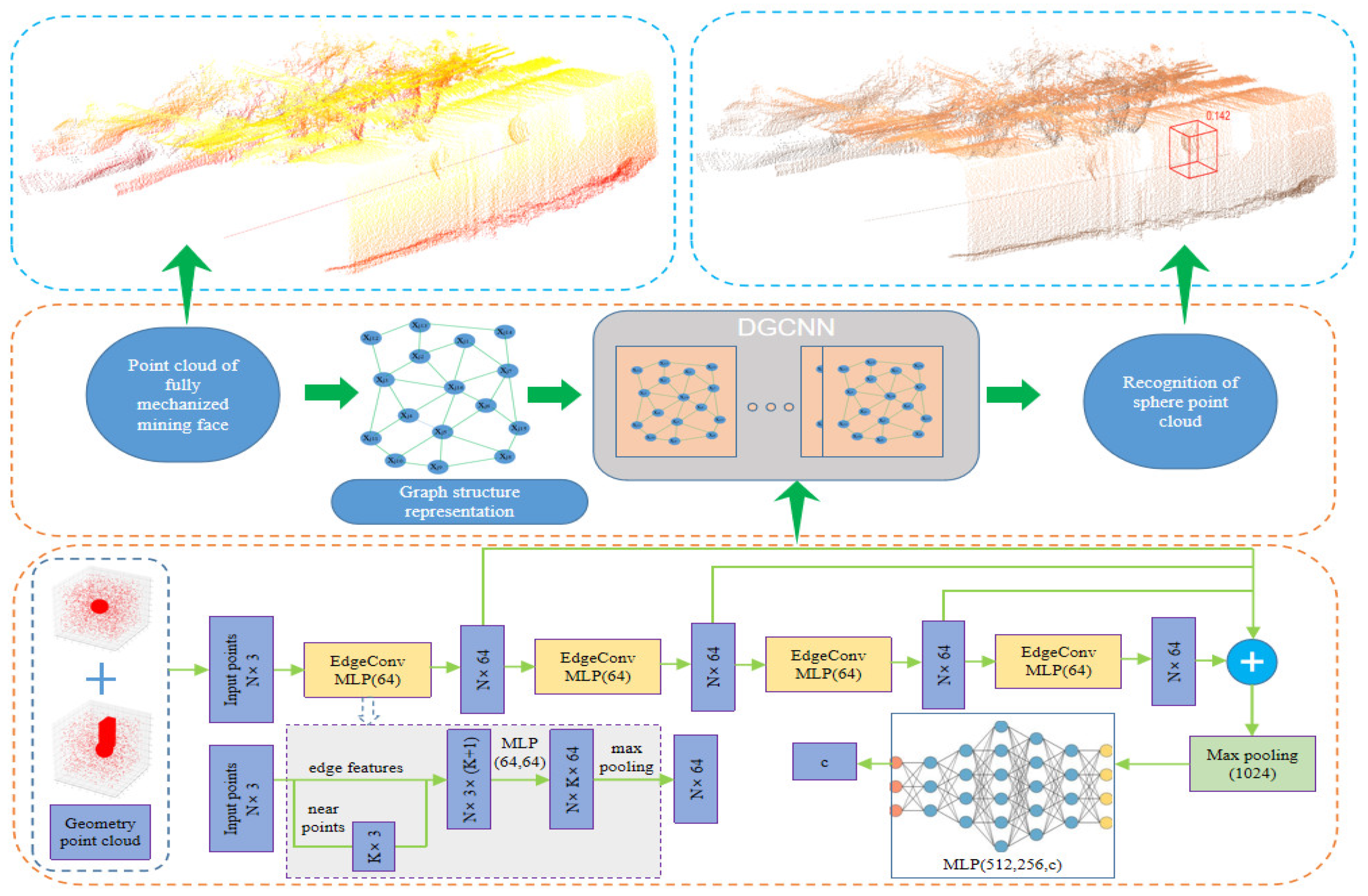
Processing Laser Point Cloud in Fully Mechanized Mining Face Based on DGCNN


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
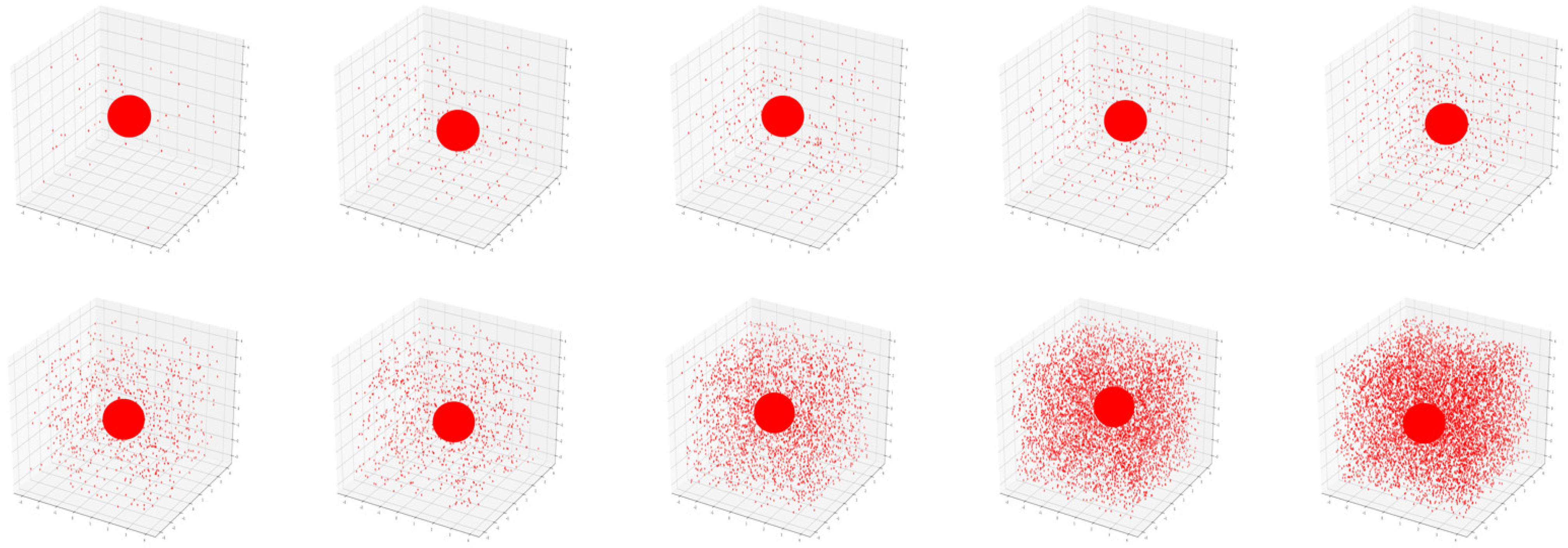
2.1. Production Method of Diversity Sphere Point Cloud
2.2. Optimization Algorithm of DGCNN
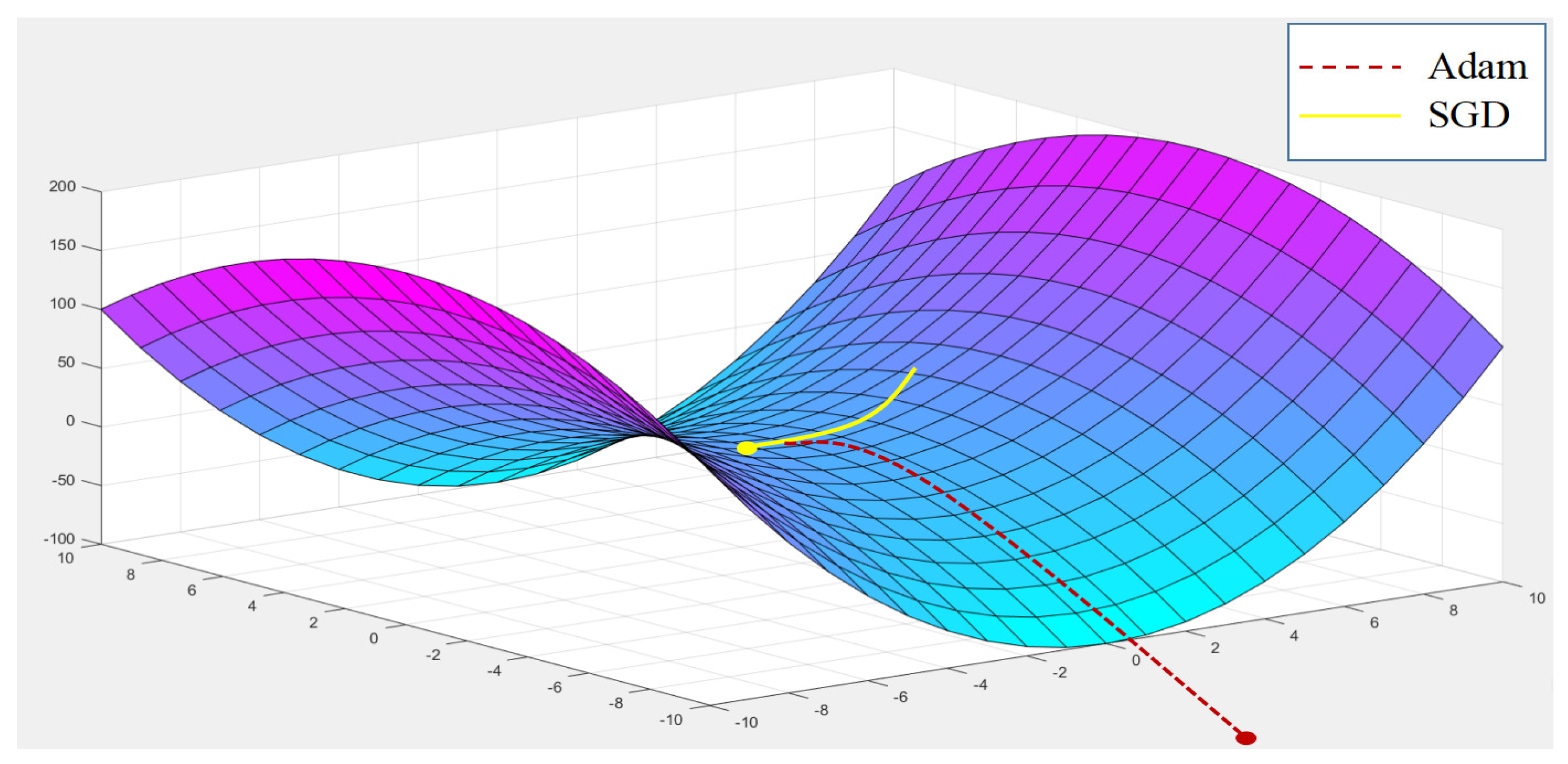
2.2.1. Stochastic Gradient Descent
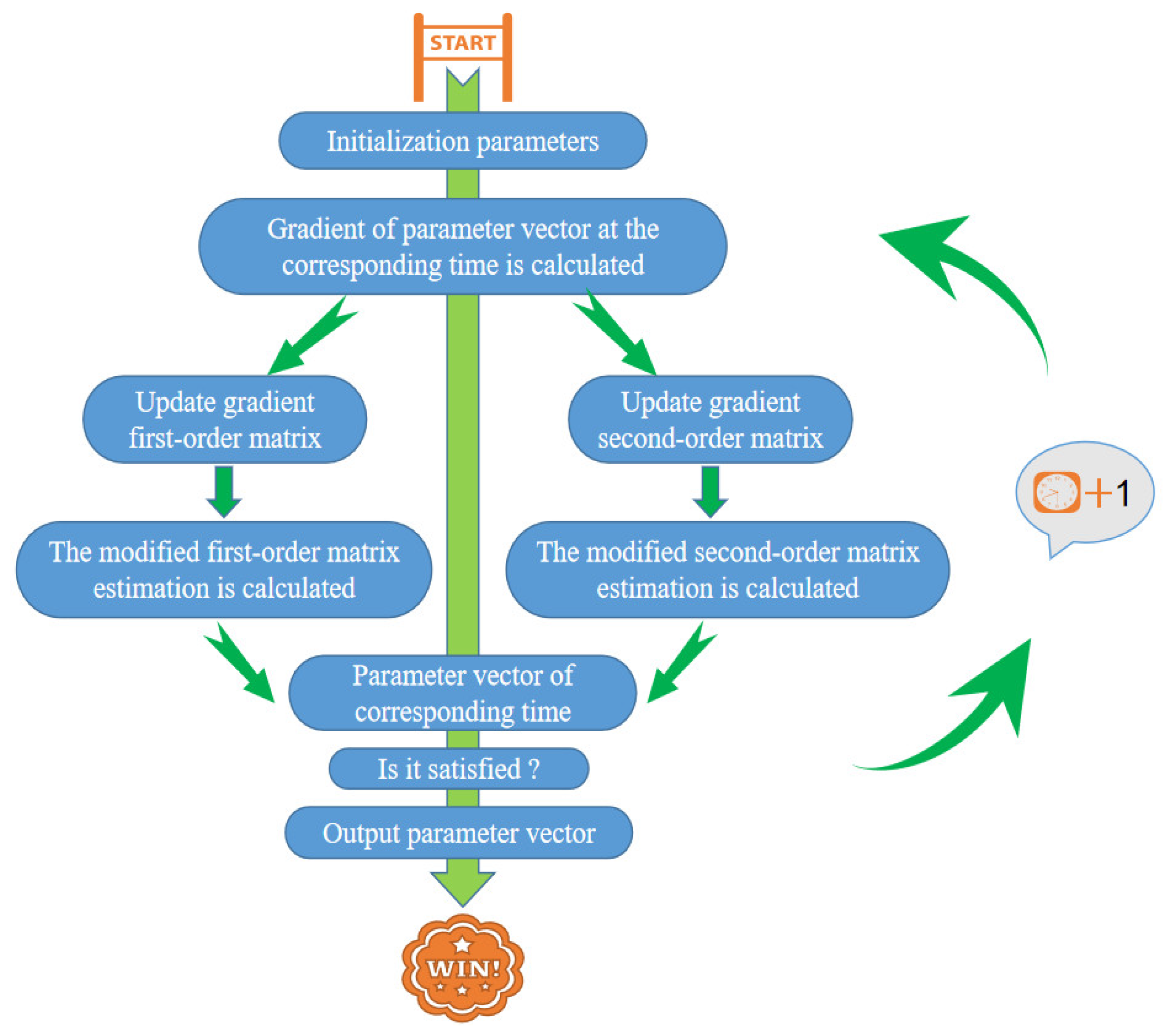
2.2.2. Adaptive Moment Estimation
2.3. Edge Convolution Method of Point Cloud
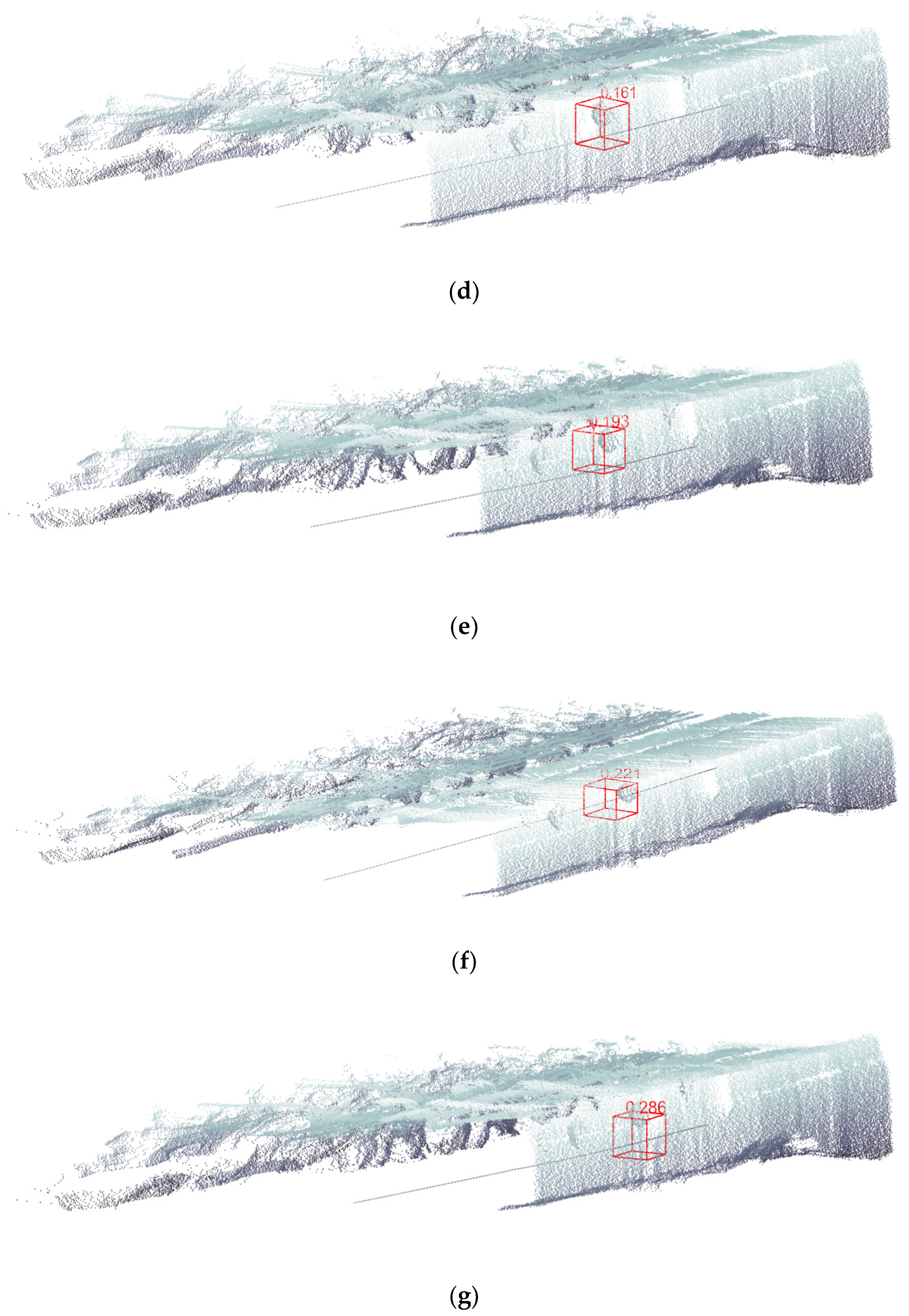
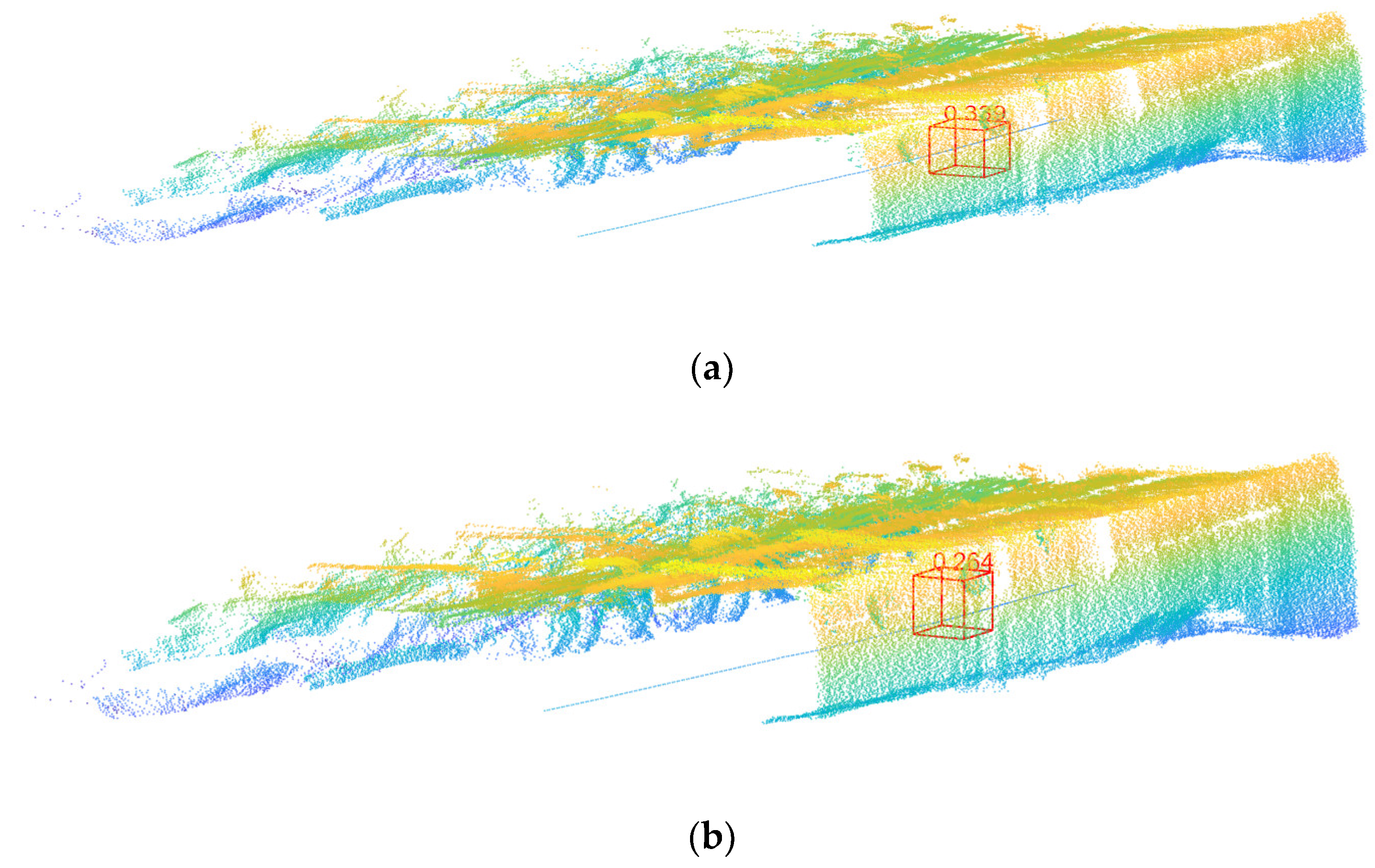
2.4. Searching Method for Markers in Point Cloud of FMMF
3. Experiment and Results
3.1. Data Set Description
3.2. Experimental Details
3.3. Experimental Results and Discussion
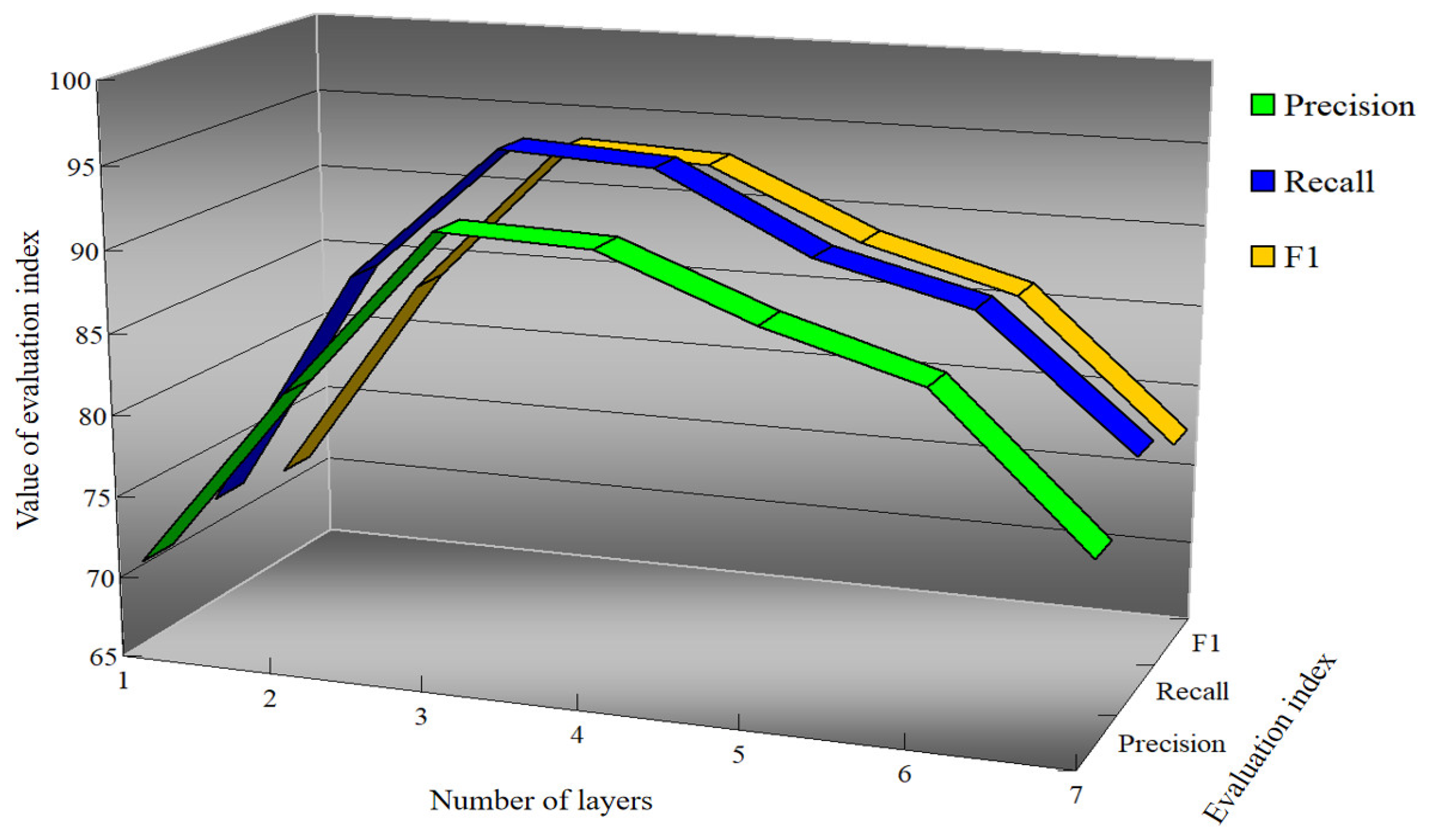
3.3.1. Performance Comparison of DGCNN with Different Edge Convolution Layers
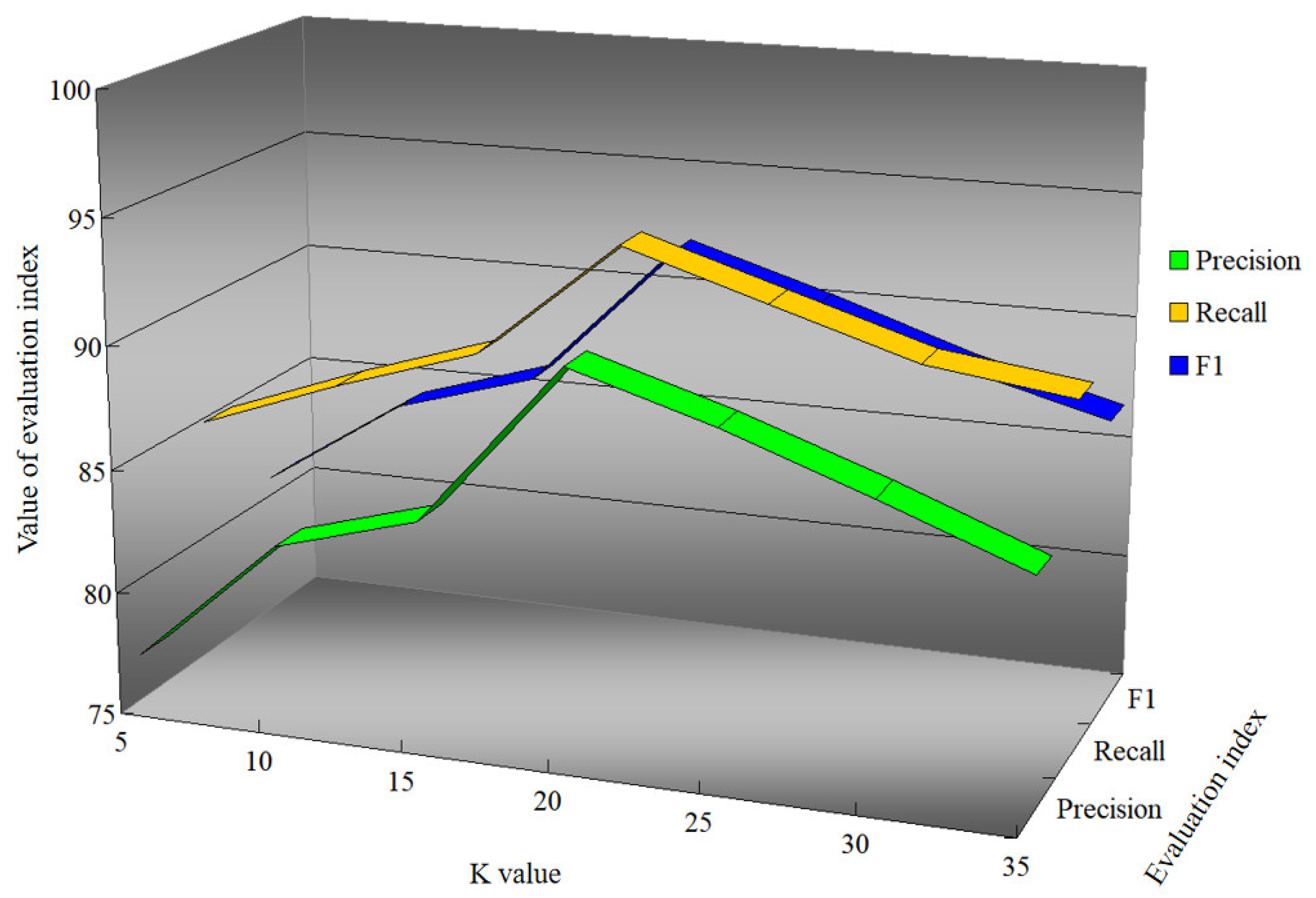
3.3.2. Performance Comparison of DGCNN with Different Optimization Algorithms
3.3.3. Performance Comparison of Different Neural Networks
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, X.; He, X.; Yang, X.; Ma, H.; Yu, Z.; Ren, G.; Li, J.; Zhang, H.; Zhang, J. Terrain Point Cloud Assisted GB-InSAR Slope and Pavement Deformation Differentiate Method in an Open-Pit Mine. Sensors 2020, 20, 2337. [Google Scholar] [CrossRef]
- Ilia, I.; Loupasakis, C.; Tsangaratos, P. Land subsidence phenomena investigated by spatiotemporal analysis of groundwater resources, remote sensing techniques, and random forest method: The case of Western Thessaly, Greece. Environ. Monit. Assess. 2018, 190, 623. [Google Scholar] [CrossRef]
- Tziachris, P.; Aschonitis, V.; Chatzistathis, T.; Papadopoulou, M.; Doukas, I.D. Comparing Machine Learning Models and Hybrid Geostatistical Methods Using Environmental and Soil Covariates for Soil pH Prediction. ISPRS Int. J. Geo-Inf. 2020, 9, 276. [Google Scholar] [CrossRef] [Green Version]
- Fekete, S.; Diederichs, M.; Lato, M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels. Tunn. Undergr. Space Technol. 2010, 25, 614–628. [Google Scholar] [CrossRef]
- Yang, X.; Huang, Y.; Zhang, Q. Automatic Stockpile Extraction and Measurement Using three-dimensional Point Cloud and Multi-Scale Directional Curvature. Remote Sens. 2020, 12, 960. [Google Scholar] [CrossRef] [Green Version]
- Ignjatović Stupar, D.; Rošer, J.; Vulić, M. Investigation of Unmanned Aerial Vehicles-Based Photogrammetry for Large Mine Subsidence Monitoring. Minerals 2020, 10, 196. [Google Scholar] [CrossRef] [Green Version]
- Pal, A.; Rošer, J.; Vulić, M. Surface Subsidence Prognosis above an Underground Longwall Excavation and Based on three-dimensional Point Cloud Analysis. Minerals 2020, 10, 82. [Google Scholar] [CrossRef] [Green Version]
- Leśniak, A.; Śledź, E.; Mirek, K. Detailed Recognition of Seismogenic Structures Activated during Underground Coal Mining: A Case Study from Bobrek Mine, Poland. Energies 2020, 13, 4622. [Google Scholar] [CrossRef]
- Tachella, J.; Altmann, Y.; Mellado, N.; McCarthy, A.; Tobin, R.; Buller, G.; Tourneret, J.; McLaughlin, S. Real-time three-dimensional reconstruction from single-photon lidar data using plug-and-play point cloud denoisers. Nat. Commun. 2019, 10, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Alsadik, B. Ideal Angular Orientation of Selected 64-Channel Multi Beam Lidars for Mobile Mapping Systems. Remote Sens. 2020, 12, 510. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.-S.; Sun, C.-G.; Kim, M.; Cho, H.-I.; Lee, M.-G. GIS-Based Optimum Geospatial Characterization for Seismic Site Effect Assessment in an Inland Urban Area, South Korea. Appl. Sci. 2020, 10, 7443. [Google Scholar] [CrossRef]
- Cabrera-Barona, P. Influence of Urban Multi-Criteria Deprivation and Spatial Accessibility to Healthcare on Self-Reported Health. Urban Sci. 2017, 1, 11. [Google Scholar] [CrossRef] [Green Version]
- Zięba-Kulawik, K.; Skoczylas, K.; Mustafa, A.; Wężyk, P.; Gerber, P.; Teller, J.; Omrani, H. Spatiotemporal Changes in three-dimensional Building Density with LiDAR and GEOBIA: A City-Level Analysis. Remote Sens. 2020, 12, 3668. [Google Scholar] [CrossRef]
- Prokop, M.; Shaikh, S.A.; Kim, K.-S. Low Overlapping Point Cloud Registration Using Line Features Detection. Remote Sens. 2020, 12, 61. [Google Scholar] [CrossRef] [Green Version]
- Su, T.; Wang, W.; Lv, Z.; Wu, W.; Li, X. FRapid Delaunay triangulation for randomly distributed point cloud data using adaptive Hilbert curve. Comput. Graph. 2016, 54, 65–74. [Google Scholar] [CrossRef]
- Liu, N.; Lin, B.; Lv, G.; Zhu, A.; Zhou, L. A Delaunay triangulation algorithm based on dual-spatial data organization. PFG–Journal of Photogrammetry. Remote Sens. Geoinf. Sci. 2019, 87, 19–31. [Google Scholar]
- Zhao, Y.; Shi, C.; Kwon, K.; Piao, Y.; Piao, M.; Kim, N. Fast calculation method of computer-generated hologram using a depth camera with point cloud gridding. Opt. Commun. 2018, 411, 166–169. [Google Scholar] [CrossRef]
- Dey, T.; Wang, L. Voronoi-based feature curves extraction for sampled singular surfaces. Comput. Graph. 2013, 37, 659–668. [Google Scholar] [CrossRef] [Green Version]
- Shi, P.; Ye, Q.; Zeng, L. A Novel Indoor Structure Extraction Based on Dense Point Cloud. ISPRS Int. J. Geo-Inf. 2020, 9, 660. [Google Scholar] [CrossRef]
- Tong, G.; Li, Y.; Zhang, W.; Chen, D.; Zhang, Z.; Yang, J.; Zhang, J. Point Set Multi-Level Aggregation Feature Extraction Based on Multi-Scale Max Pooling and LDA for Point Cloud Classification. Remote Sens. 2019, 11, 2846. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Popescu, S.; Malambo, L.; Zhao, K.; Krause, K. From LiDAR Waveforms to Hyper Point Clouds: A Novel Data Product to Characterize Vegetation Structure. Remote Sens. 2018, 10, 1949. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Shao, J.; Guo, D. A Multi-Feature Search Window Method for Road Boundary Detection Based on LIDAR Data. Sensors 2019, 19, 1551. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Z.; Zhang, Z.; Zhong, R.; Chen, D.; Sun, T.; Deng, X.; Li, Z.; Qin, C.-Z. Content-Sensitive Multilevel Point Cluster Construction for ALS Point Cloud Classification. Remote Sens. 2019, 11, 342. [Google Scholar] [CrossRef] [Green Version]
- Qian, Z.; Liu, X.; Tao, F.; Zhou, T. Identification of Urban Functional Areas by Coupling Satellite Images and Taxi GPS Trajectories. Remote Sens. 2020, 12, 2449. [Google Scholar] [CrossRef]
- Huang, T.; Zhao, S.; Geng, L.; Xu, Q. Unsupervised Monocular Depth Estimation Based on Residual Neural Network of Coarse–Refined Feature Extractions for Drone. Electronics 2019, 8, 1179. [Google Scholar] [CrossRef] [Green Version]
- Petroșanu, D.-M.; Căruțașu, G.; Căruțașu, N.L.; Pîrjan, A. A Review of the Recent Developments in Integrating Machine Learning Models with Sensor Devices in the Smart Buildings Sector with a View to Attaining Enhanced Sensing, Energy Efficiency, and Optimal Building Management. Energies 2019, 12, 4745. [Google Scholar] [CrossRef] [Green Version]
- Bello, S.A.; Yu, S.; Wang, C.; Adam, J.M.; Li, J. Review: Deep Learning on three-dimensional Point Clouds. Remote Sens. 2020, 12, 1729. [Google Scholar] [CrossRef]
- Pastucha, E.; Puniach, E.; Ścisłowicz, A.; Ćwiąkała, P.; Niewiem, W.; Wiącek, P. 3D Reconstruction of Power Lines Using UAV Images to Monitor Corridor Clearance. Remote Sens. 2020, 12, 3698. [Google Scholar] [CrossRef]
- Hu, X.; Yuan, Y. Deep-Learning-Based Classification for DTM Extraction from ALS Point Cloud. Remote Sens. 2016, 8, 730. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Pang, M.; Wang, J. Classifying airborne LiDAR point clouds via deep features learned by a multi-scale convolutional neural network. Int. J. Geogr. Inf. Sci. 2018, 32, 960–979. [Google Scholar] [CrossRef]
- Politz, F.; Sester, M. Exploring ALS and DIM Data for Semantic Segmentation Using CNNs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2018, 42, 347–354. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for three-dimensional Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar]
- Young, M.; Pretty, C.; Agostinho, S.; Green, R.; Chen, X. Loss of Significance and Its Effect on Point Normal Orientation and Cloud Registration. Remote Sens. 2019, 11, 1329. [Google Scholar] [CrossRef] [Green Version]
- Mirsu, R.; Simion, G.; Caleanu, C.D.; Pop-Calimanu, I.M. A PointNet-Based Solution for three-dimensional Hand Gesture Recognition. Sensors 2020, 20, 3226. [Google Scholar] [CrossRef] [PubMed]
- Gamal, A.; Wibisono, A.; Wicaksono, S.B.; Abyan, M.A.; Hamid, N.; Wisesa, H.A.; Jatmiko, W.; Ardhianto, R. Automatic LIDAR building segmentation based on DGCNN and euclidean clustering. J. Big Data 2020, 7, 1–18. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, X.; Dai, H.; Qu, S. DEM Extraction from ALS Point Clouds in Forest Areas via Graph Convolution Network. Remote Sens. 2020, 12, 178. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Chung, J.; Cho, M.; Timilsina, S.; Sohn, K.; Kim, J.; Sohn, K. Deep-Learning Technique To Convert a Crude Piezoresistive Carbon Nanotube-Ecoflex Composite Sheet into a Smart, Portable, Disposable, and Extremely Flexible Keypad. ACS Appl. Mater. Interfaces 2018, 10, 20862–20868. [Google Scholar] [CrossRef]
- Kim, H.; Kim, C. Deep-Learning-Based Classification of Point Clouds for Bridge Inspection. Remote Sens. 2020, 12, 3757. [Google Scholar] [CrossRef]
- Morbidoni, C.; Pierdicca, R.; Paolanti, M.; Quattrini, R.; Mammoli, R. Learning from Synthetic Point Cloud Data for Historical Buildings Semantic Segmentation. ACM J. Comput. Cult. Herit. 2020, 13, 1–16. [Google Scholar] [CrossRef]
- Pierdicca, R.; Paolanti, M.; Matrone, F.; Martini, M.; Morbidoni, C.; Malinverni, E.S.; Frontoni, E.; Lingua, A.M. Point Cloud Semantic Segmentation Using a Deep Learning Framework for Cultural Heritage. Remote Sens. 2020, 12, 1005. [Google Scholar] [CrossRef] [Green Version]
- Belkina, A.C.; Ciccolella, C.O.; Anno, R.; Halpert, R.; Spidlen, J.; Snyder-Cappione, J.E. Automated optimized parameters for T-distributed stochastic neighbor embedding improve visualization and analysis of large datasets. Nat. Commun. 2019, 10, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, S.; Han, G.; Zhao, Q.; Wei, P. Prediction of Driver’s Attention Points Based on Attention Model. Appl. Sci. 2020, 10, 1083. [Google Scholar] [CrossRef] [Green Version]
- Cortiñas-Lorenzo, B.; Pérez-González, F. Adam and the Ants: On the Influence of the Optimization Algorithm on the Detectability of DNN Watermarks. Entropy 2020, 22, 1379. [Google Scholar] [CrossRef] [PubMed]
- Bala, P.C.; Eisenreich, B.R.; Yoo, S.B.M.; Hayden, B.Y.; Park, H.S.; Zimmermann, J. Automated markerless pose estimation in freely moving macaques with OpenMonkeyStudio. Nat. Commun. 2020, 11, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic graph cnn for learning on point clouds. ACM Trans. Graph. 2019, 38, 1–12. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Li, S.; Xiong, D.; Fang, P.; Liao, M. Remote Sensing Image Semantic Segmentation Based on Edge Information Guidance. Remote Sens. 2020, 12, 1501. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, G.; Mo, R.; Wang, M.; Bao, Y. Benefit Evaluation of Water and Soil Conservation Measures in Shendong Based on Particle Swarm Optimization and the Analytic Hierarchy Process. Water 2020, 12, 1955. [Google Scholar] [CrossRef]
- Ji, X.; Song, D.; Zhao, H.; Li, Y.; He, K. Experimental Analysis of Pore and Permeability Characteristics of Coal by Low-Field NMR. Appl. Sci. 2018, 8, 1374. [Google Scholar] [CrossRef] [Green Version]
- Benjdira, B.; Bazi, Y.; Koubaa, A.; Ouni, K. Unsupervised Domain Adaptation Using Generative Adversarial Networks for Semantic Segmentation of Aerial Images. Remote Sens. 2019, 11, 1369. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Shi, T.; Zhang, Y.; Chen, W.; Wang, Z.; Li, H. Learning deep semantic segmentation network under multiple weakly-supervised constraints for cross-domain remote sensing image semantic segmentation. ISPRS J. Photogramm. Remote Sens. 2021, 175, 20–33. [Google Scholar] [CrossRef]



























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, Z.; Zhao, S.; Guo, W.; Guo, X.; Wang, Y. Processing Laser Point Cloud in Fully Mechanized Mining Face Based on DGCNN. ISPRS Int. J. Geo-Inf. 2021, 10, 482. https://doi.org/10.3390/ijgi10070482
Xing Z, Zhao S, Guo W, Guo X, Wang Y. Processing Laser Point Cloud in Fully Mechanized Mining Face Based on DGCNN. ISPRS International Journal of Geo-Information. 2021; 10(7):482. https://doi.org/10.3390/ijgi10070482
Chicago/Turabian StyleXing, Zhizhong, Shuanfeng Zhao, Wei Guo, Xiaojun Guo, and Yuan Wang. 2021. "Processing Laser Point Cloud in Fully Mechanized Mining Face Based on DGCNN" ISPRS International Journal of Geo-Information 10, no. 7: 482. https://doi.org/10.3390/ijgi10070482
APA StyleXing, Z., Zhao, S., Guo, W., Guo, X., & Wang, Y. (2021). Processing Laser Point Cloud in Fully Mechanized Mining Face Based on DGCNN. ISPRS International Journal of Geo-Information, 10(7), 482. https://doi.org/10.3390/ijgi10070482