

Analysis and Visualization of Vessels’ RElative MOtion (REMO)


Abstract
:1. Introduction
Background
2. Materials and Methods
2.1. Study Areas and Data
2.2. REMO Analysis
2.3. Development of Software, V-REMO
2.4. User Evaluation of V-REMO
3. Results
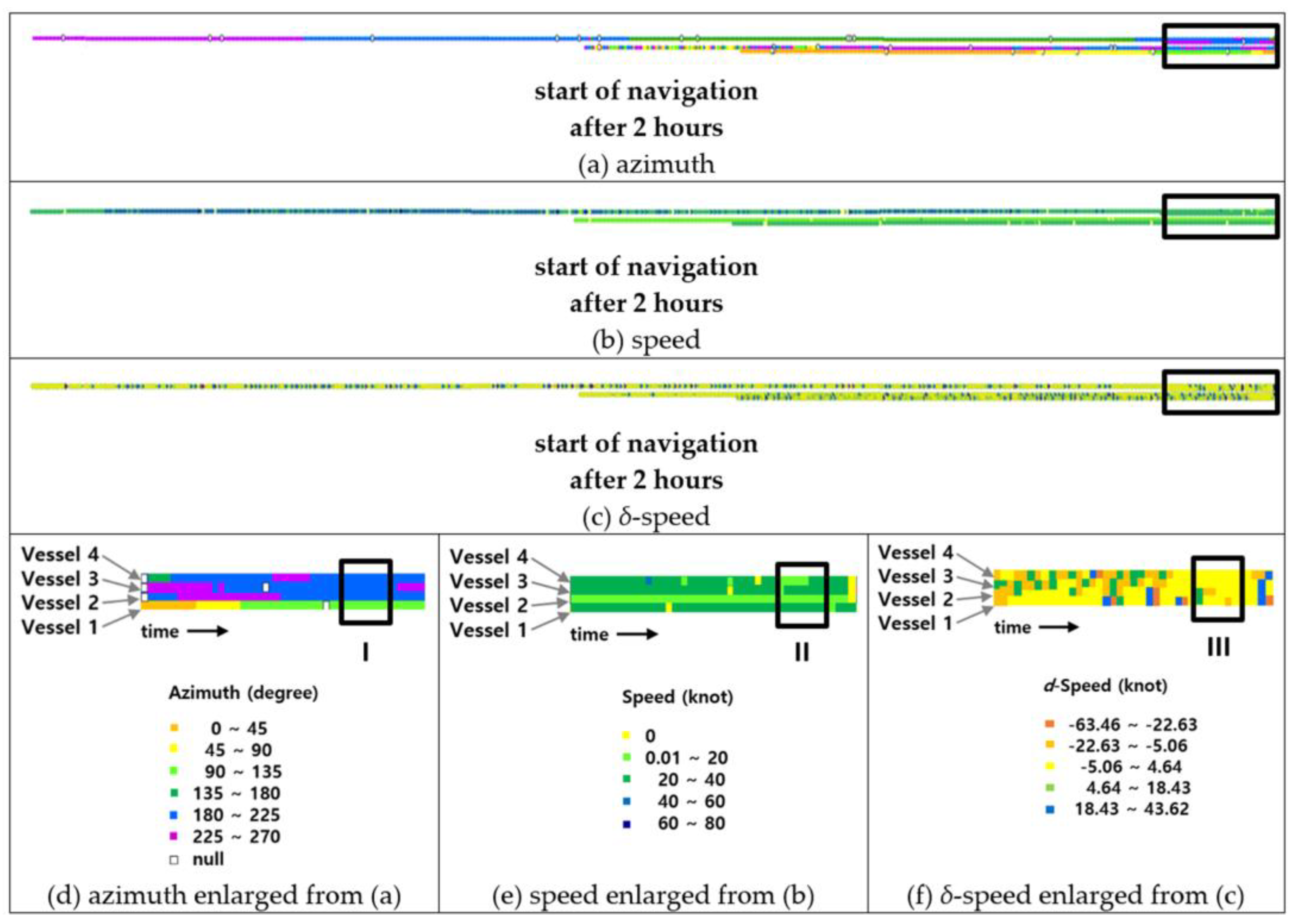
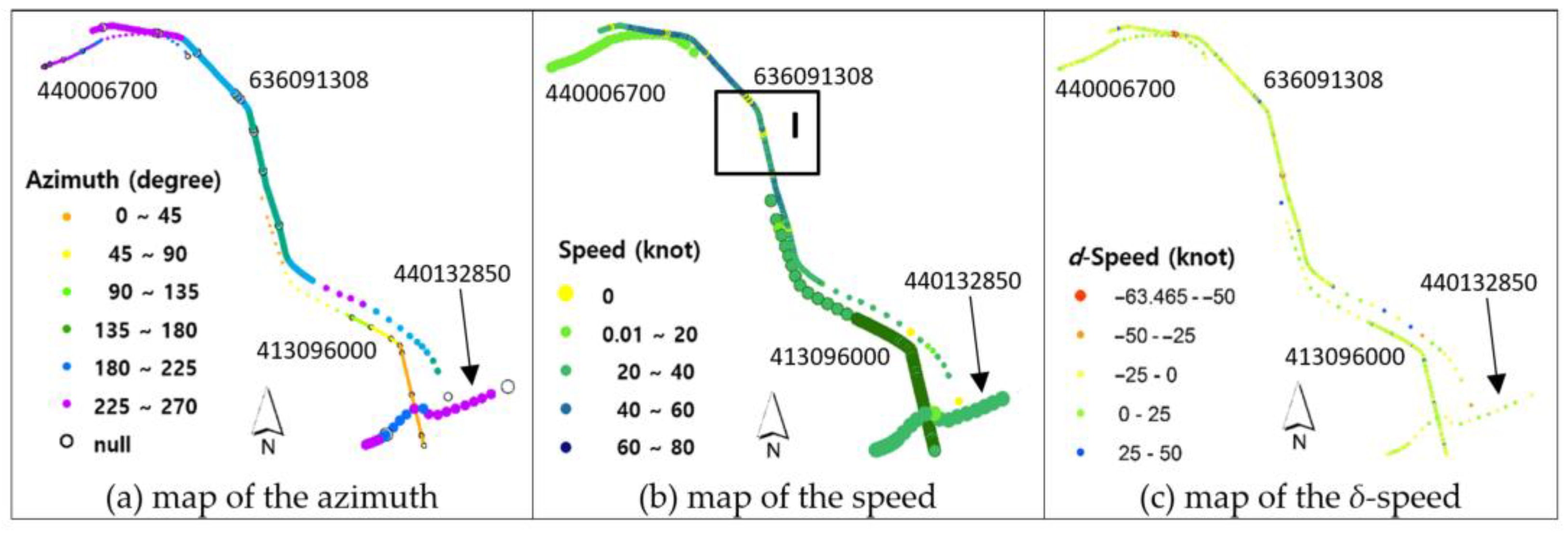
3.1. REMO Analysis
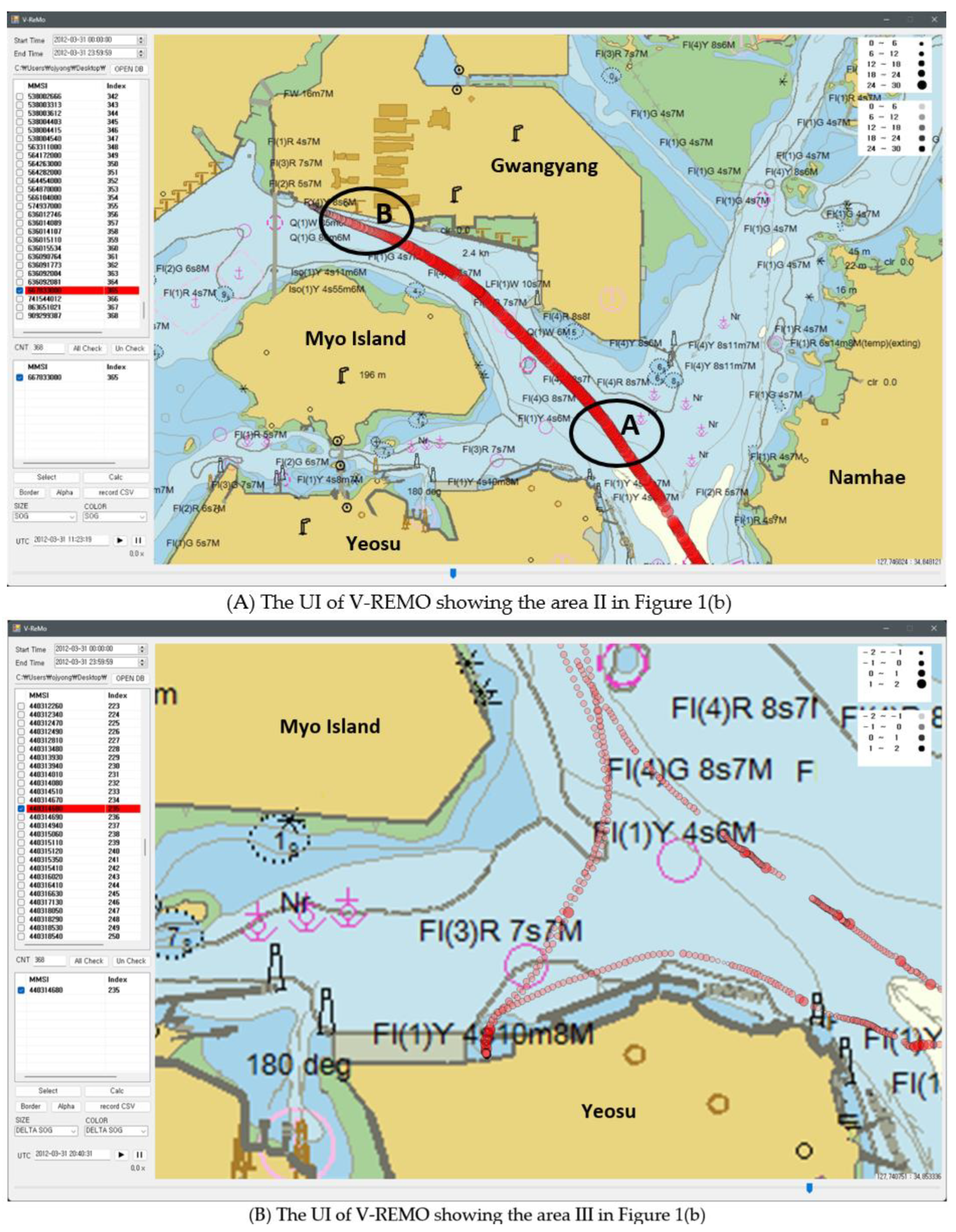
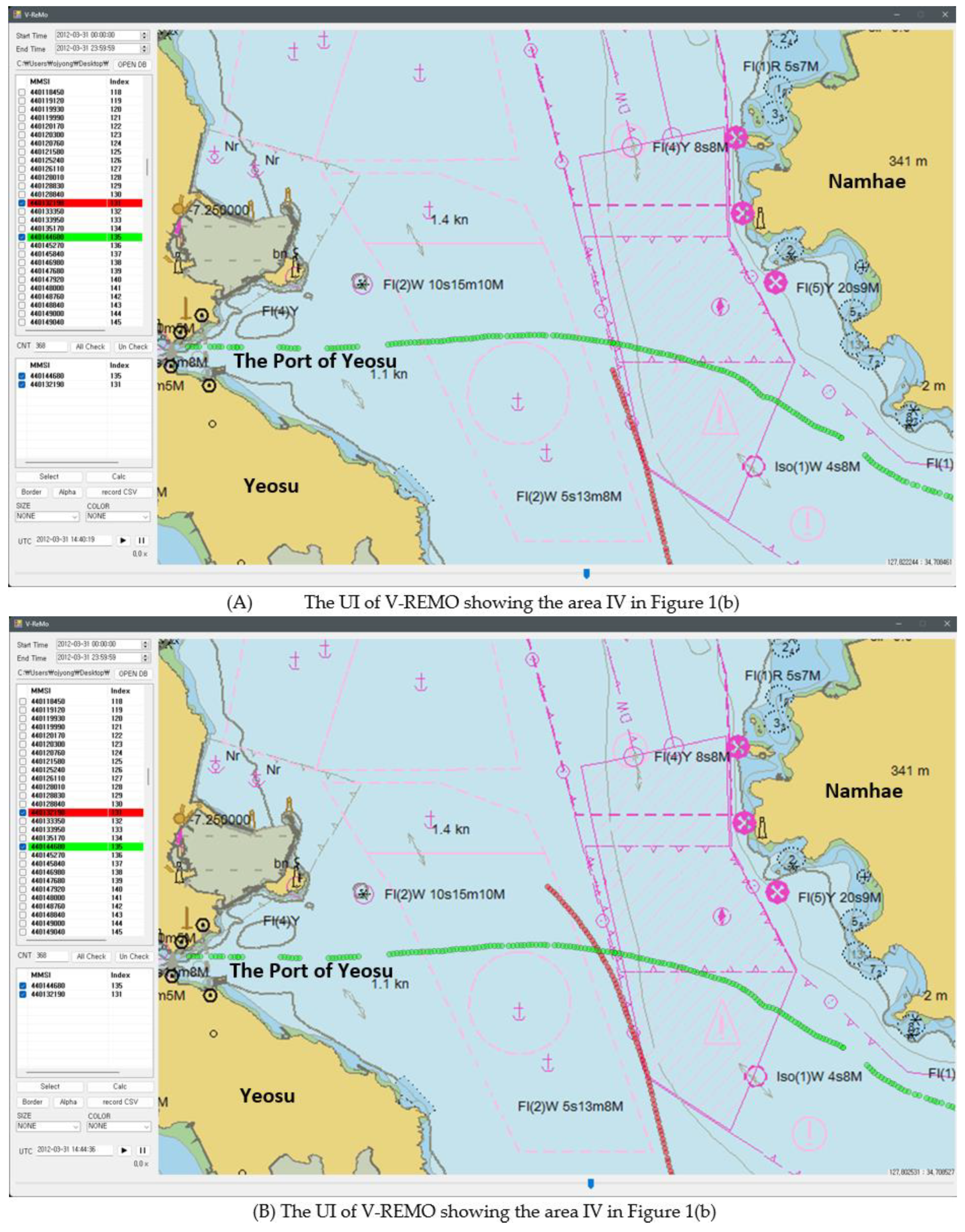
3.2. Application: Empirical REMO Analysis Using V-REMO Software
3.3. User Evaluations of V-REMO
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chang, S.J. Development and Analysis of AIS Applications as an Efficient Tool for Vessel Traffic Service. In Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No.04CH37600), Kobe, Japan, 9–12 November 2004; Volume 4, pp. 2249–2253. [Google Scholar] [CrossRef]
- Mazzarella, F.; Vespe, M.; Damalas, D.; Osio, G. Discovering Vessel Activities at Sea Using AIS Data: Mapping of Fishing Footprints. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–7. [Google Scholar]
- Jin, J.; Song, G. Bureaucratic Accountability and Disaster Response: Why Did the Korea Coast Guard Fail in Its Rescue Mission During the Sewol Ferry Accident? Risk Hazards Crisis Public Policy 2017, 8, 220–243. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rothe, D.; Muzzatti, S.; Mullins, C.W. Crime on the High Seas: Crimes of Globalization and the Sinking of the Senegalese Ferry Le Joola. Crit. Crim. 2006, 14, 159–180. [Google Scholar] [CrossRef]
- Kim, T.; Nazir, S.; Øvergård, K.I. A STAMP-Based Causal Analysis of the Korean Sewol Ferry Accident. Saf. Sci. 2016, 83, 93–101. [Google Scholar] [CrossRef]
- Abdul Rahman, N.S.F.; Rosli, Z. An Innovation Approach for Improving Passenger Vessels Safety Level: Overload Problem. Int. J. Bus. Tour. Appl. Sci. 2014, 2, 61–74. [Google Scholar]
- Won, D.; Yoo, S.; Yoo, H.; Lim, J. Complex Adaptive Systems Approach to Sewol Ferry Disaster in Korea. J. Open Innov. Technol. Mark. Complex. 2015, 1, 22. [Google Scholar] [CrossRef] [Green Version]
- Korea Maritime Safety Tribunal. Available online: https://www.kmst.go.kr/eng/page.do?menuIdx=227 (accessed on 31 December 2022).
- Gionet, P. Public Vessel Operator’s Study Guide; New York State Office of Parks, Recreation and Historic Preservation, Marine Services Bureau: Albany, New York, USA, 2019. [Google Scholar]
- Mestl, T.; Tallakstad, K.T.; Castberg, R. Identifying and Analyzing Safety Critical Maneuvers from High Resolution AIS Data. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 69–77. [Google Scholar] [CrossRef] [Green Version]
- Goerlandt, F.; Montewka, J. Maritime Transportation Risk Analysis: Review and Analysis in Light of Some Foundational Issues. Reliab. Eng. Syst. Saf. 2015, 138, 115–134. [Google Scholar] [CrossRef]
- Hansen, M.G.; Jensen, T.K.; Lehn-Schiøler, T.; Melchild, K.; Rasmussen, F.M.; Ennemark, F. Empirical Ship Domain Based on AIS Data. J. Navig. 2013, 66, 931–940. [Google Scholar] [CrossRef] [Green Version]
- Harati-Mokhtari, A.; Wall, A.; Brooks, P.; Wang, J. Automatic Identification System (AIS): Data Reliability and Human Error Implications. J. Navig. 2007, 60, 373–389. [Google Scholar] [CrossRef]
- Mou, J.M.; Tak, C.v.d.; Ligteringen, H. Study on Collision Avoidance in Busy Waterways by Using AIS Data. Ocean. Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel Pattern Knowledge Discovery from AIS Data: A Framework for Anomaly Detection and Route Prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef] [Green Version]
- Perez, H.M.; Chang, R.; Billings, R.; Kosub, T.L. Automatic Identification Systems (AIS) Data Use in Marine Vessel Emission Estimation. In Proceedings of the 18th Annual International Emission Inventory Conference, Baltimore, MD, USA, 14–17 April 2009; Volume 14, p. e17. [Google Scholar]
- Ristic, B.; La Scala, B.; Morelande, M.; Gordon, N. Statistical Analysis of Motion Patterns in AIS Data: Anomaly Detection and Motion Prediction. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–7. [Google Scholar]
- Silveira, P.A.M.; Teixeira, A.P.; Soares, C.G. Use of AIS Data to Characterise Marine Traffic Patterns and Ship Collision Risk off the Coast of Portugal. J. Navig. 2013, 66, 879–898. [Google Scholar] [CrossRef] [Green Version]
- Laube, P.; Imfeld, S. Analyzing Relative Motion within Groups of Trackable Moving Point Objects. In Geographic Information Science; Egenhofer, M.J., Mark, D.M., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2002; pp. 132–144. [Google Scholar] [CrossRef]
- Rydstedt, L.W.; Lundh, M. An Ocean of Stress? The Relationship between Psychosocial Workload and Mental Strain among Engine Officers in the Swedish Merchant Fleet. Int. Marit. Health 2010, 62, 168–175. [Google Scholar]
- Chauvin, C.; Lardjane, S.; Morel, G.; Clostermann, J.-P.; Langard, B. Human and Organisational Factors in Maritime Accidents: Analysis of Collisions at Sea Using the HFACS. Accid. Anal. Prev. 2013, 59, 26–37. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Makino, H.; Furusho, M. Analysis of Ship Drifting in a Narrow Channel Using Automatic Identification System (AIS) Data. WMU J. Marit. Affairs 2017, 16, 351–363. [Google Scholar] [CrossRef]
- Lambrou, M.A.; Rødseth, Ø.J.; Foster, H.; Fjørtoft, K. Service-Oriented Computing and Model-Driven Development as Enablers of Port Information Systems: An Integrated View. WMU J. Marit. Affairs 2013, 12, 41–61. [Google Scholar] [CrossRef]
- Baldauf, M.; Benedict, K.; Fischer, S.; Gluch, M.; Kirchhoff, M.; Klaes, S.; Schröder-Hinrichs, J.-U.; Meißner, D.; Fielitz, U.; Wilske, E. E-Navigation and Situation-Dependent Manoeuvring Assistance to Enhance Maritime Emergency Response. WMU J. Marit. Affairs. 2011, 10, 209. [Google Scholar] [CrossRef] [Green Version]
- Graff, J. E-Maritime: A Framework for Knowledge Exchange and Development of Innovative Marine Information Services. WMU J. Marit. Affairs. 2009, 8, 173–201. [Google Scholar] [CrossRef]
- Varelas, T.; Plitsos, S. Real-Time Ship Management through the Lens of Big Data. In Proceedings of the 2020 IEEE 6th International Conference on Big Data Computing Service and Applications (BigDataService), Oxford, UK, 3–6 August 2020; pp. 142–147. [Google Scholar] [CrossRef]
- United States Coast Guard, U.S. Department of Homeland Security. Navigation Center. Available online: https://www.navcen.uscg.gov/?pageName=vtsMain (accessed on 31 December 2022).
- Marine Traffic Control—Marine Department. Available online: https://www.mardep.gov.hk/en/pub_services/ocean/vts.html (accessed on 31 December 2022).
- Swedish Maritime Administration. Shipping of the Future. Available online: https://www.sjofartsverket.se/en/ (accessed on 31 December 2022).
- Port of London Authority. About London VTS. POLA2012. Available online: http://www.pla.co.uk/Safety/Vessel-Traffic-Services-VTS-/About-London-VTS (accessed on 31 December 2022).
- Korea Coast Guard. Available online: https://www.kcg.go.kr/kcg/vts/main.do (accessed on 31 December 2022).
- Kaklis, D.; Eirinakis, P.; Giannakopoulos, G.; Spyropoulos, C.; Varelas, T.J.; Varlamis, I. A Big Data Approach for Fuel Oil Consumption Estimation in the Maritime Industry. In Proceedings of the 2022 IEEE Eighth International Conference on Big Data Computing Service and Applications (BigDataService), Newark, CA, USA, 15–18 August 2022; pp. 39–47. [Google Scholar] [CrossRef]
- Demšar, U.; Virrantaus, K. Space–Time Density of Trajectories: Exploring Spatio-Temporal Patterns in Movement Data. Int. J. Geogr. Inf. Sci. 2010, 24, 1527–1542. [Google Scholar] [CrossRef]
- Troupiotis-Kapeliaris, A.; Spiliopoulos, G.; Vodas, M.; Zissis, D. Navigating through Dense Waters: A Toolbox for Creating Maritime Density Maps. In Proceedings of the 12th Hellenic Conference on Artificial Intelligence, SETN ’22, New York, NY, USA, 7–9 September 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Hurni, L. Multimedia Atlas Information Systems. In Encyclopedia of GIS; Shekhar, S., Xiong, H., Eds.; Springer: Boston, MA, USA, 2008; pp. 759–763. [Google Scholar] [CrossRef]
- Elzakker, C.P.J.M.v.; Ooms, K. Understanding Map Uses and Users. In The Routledge Handbook of Mapping and Cartography; Routledge: Oxfordshire, UK, 2017. [Google Scholar]
- Roth, R.E.; Çöltekin, A.; Delazari, L.; Filho, H.F.; Griffin, A.; Hall, A.; Korpi, J.; Lokka, I.; Mendonça, A.; Ooms, K.; et al. User Studies in Cartography: Opportunities for Empirical Research on Interactive Maps and Visualizations. Int. J. Cartogr. 2017, 3 (Suppl. S1), 61–89. [Google Scholar] [CrossRef]
- Medyńska-Gulij, B.; Zagata, K. Experts and Gamers on Immersion into Reconstructed Strongholds. ISPRS Int. J. Geo-Inf. 2020, 9, 655. [Google Scholar] [CrossRef]
- Kramers, E.R. Interaction with Maps on the Internet—A User Centred Design Approach for The Atlas of Canada. Cartogr. J. 2008, 45, 98–107. [Google Scholar] [CrossRef]
- Wielebski, Ł.; Medyńska-Gulij, B. Graphically Supported Evaluation of Mapping Techniques Used in Presenting Spatial Accessibility. Cartogr. Geogr. Inf. Sci. 2019, 46, 311–333. [Google Scholar] [CrossRef]
- Ban, H.; Ahlqvist, O. Geographical Counterpoint to Choreographic Information Based on Approaches in GIScience and Visualization. Int. J. Geospat. Environ. Res. 2020, 7, 4. [Google Scholar]
- Gudmundsson, J.; van Kreveld, M.; Speckmann, B. Efficient Detection of Patterns in 2D Trajectories of Moving Points. Geoinformatica 2007, 11, 195–215. [Google Scholar] [CrossRef] [Green Version]
- Laube, P.; Purves, R.S. An Approach to Evaluating Motion Pattern Detection Techniques in Spatio-Temporal Data. Comput. Environ. Urban Syst. 2006, 30, 347–374. [Google Scholar] [CrossRef]
- Laube, P.; Imfeld, S.; Weibel, R. Discovering Relative Motion Patterns in Groups of Moving Point Objects. Int. J. Geogr. Inf. Sci. 2005, 19, 639–668. [Google Scholar] [CrossRef]
- Chavoshi, S.H.; De Baets, B.; Neutens, T.; Ban, H.; Ahlqvist, O.; De Tré, G.; Van de Weghe, N. Knowledge Discovery in Choreographic Data Using Relative Motion Matrices and Dynamic Time Warping. Appl. Geogr. 2014, 47, 111–124. [Google Scholar]
- Li, G.; Liu, M.; Zhang, X.; Wang, C.; Lai, K.; Qian, W. Semantic Recognition of Ship Motion Patterns Entering and Leaving Port Based on Topic Model. J. Mar. Sci. Eng. 2022, 10, 2012. [Google Scholar] [CrossRef]
- Abreu, F.H.O.; Soares, A.; Paulovich, F.V.; Matwin, S. A Trajectory Scoring Tool for Local Anomaly Detection in Maritime Traffic Using Visual Analytics. ISPRS Int. J. Geo-Inf. 2021, 10, 412. [Google Scholar] [CrossRef]
- Yeosu Hang. Available online: http://encykorea.aks.ac.kr/Contents/Index?contents_id=E0036407 (accessed on 31 December 2022).
- International Maritime Organization. Guidelines for the Installation of a Shipborne Automatic Identification System (AIS) 2003. Available online: https://wwwcdn.imo.org/localresources/en/OurWork/Safety/Documents/AIS/SN.1-Circ.227.pdf (accessed on 31 December 2022).
- Automatic Identification System Message; Secure Data Repository; Dataset; Korea Research Institute of Ships & Ocean Engineering: Daejeon, Republic of Korea, 2020.
- ESRI. ArcGIS Pro: Release 2.8; Environmental Systems Research Institute: Redlands, CA, USA, 2021. [Google Scholar]
- Hettiarachchige, C.; Cavallar, S.v.; Lynar, T.; Hickson, R.I.; Gambhir, M. Risk Prediction System for Dengue Transmission Based on High Resolution Weather Data. PLoS ONE 2018, 13, e0208203. [Google Scholar] [CrossRef] [PubMed]
- Davy, R.; Kusch, E. Reconciling High Resolution Climate Datasets Using KrigR. Environ. Res. Lett. 2021, 16, 124040. [Google Scholar] [CrossRef]
- La Rosa, A.; Pagli, C.; Hurman, G.L.; Keir, D. Strain Accommodation by Intrusion and Faulting in a Rift Linkage Zone: Evidences From High-Resolution Topography Data of the Afrera Plain (Afar, East Africa). Tectonics 2022, 41, e2021TC007115. [Google Scholar] [CrossRef]
- van Westrenen, F.; Baldauf, M. Improving Conflicts Detection in Maritime Traffic: Case Studies on the Effect of Traffic Complexity on Ship Collisions. Proc. Inst. Mech. Eng. Part M: J. Eng. Marit. Environ. 2020, 234, 209–222. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Descriptions |
|---|---|
| Static information |
|
| Dynamic information |
|
| Voyage related data |
|
| Status of Vessel | Transmission Frequency |
|---|---|
| Ship at anchor | 3 min |
| Ship 0–14 knots | 12 s |
| Ship 0–14 knots and changing course | 4 s |
| Ship 14–23 knots | 6 s |
| Ship 14–23 knots and changing course | 2 s |
| Ship > 23 knots | 3 s |
| Ship > 23 knots and changing course | 2 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ban, H.; Kim, H.-j. Analysis and Visualization of Vessels’ RElative MOtion (REMO). ISPRS Int. J. Geo-Inf. 2023, 12, 115. https://doi.org/10.3390/ijgi12030115
Ban H, Kim H-j. Analysis and Visualization of Vessels’ RElative MOtion (REMO). ISPRS International Journal of Geo-Information. 2023; 12(3):115. https://doi.org/10.3390/ijgi12030115
Chicago/Turabian StyleBan, Hyowon, and Hye-jin Kim. 2023. "Analysis and Visualization of Vessels’ RElative MOtion (REMO)" ISPRS International Journal of Geo-Information 12, no. 3: 115. https://doi.org/10.3390/ijgi12030115
APA StyleBan, H., & Kim, H. -j. (2023). Analysis and Visualization of Vessels’ RElative MOtion (REMO). ISPRS International Journal of Geo-Information, 12(3), 115. https://doi.org/10.3390/ijgi12030115