

A Spatiotemporal Hierarchical Analysis Method for Urban Traffic Congestion Optimization Based on Calculation of Road Carrying Capacity in Spatial Grids
Abstract
:1. Introduction
2. Related Works
3. Data and Methods
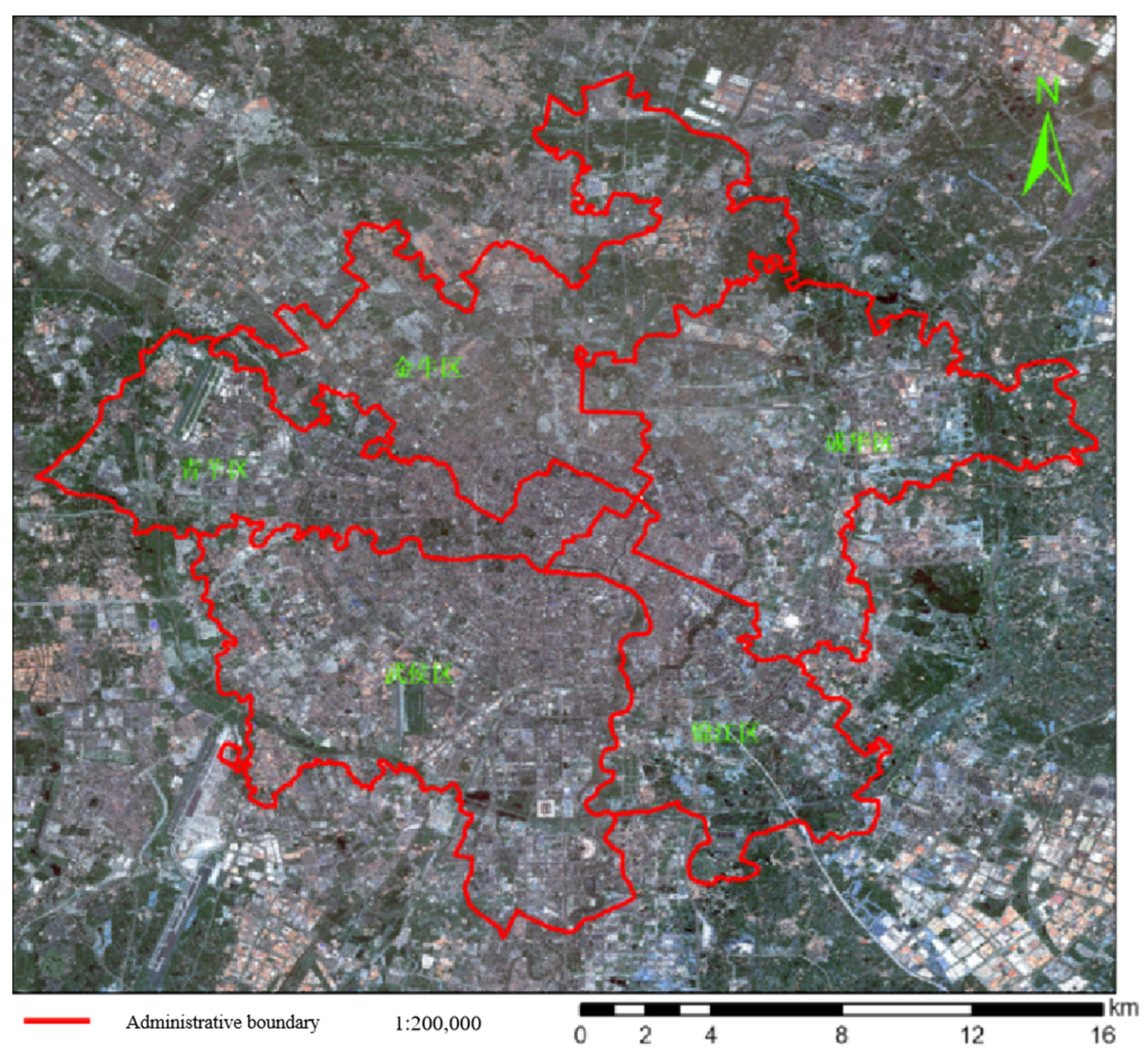
3.1. Study Area and Data Acquisition
3.2. Research Methodology
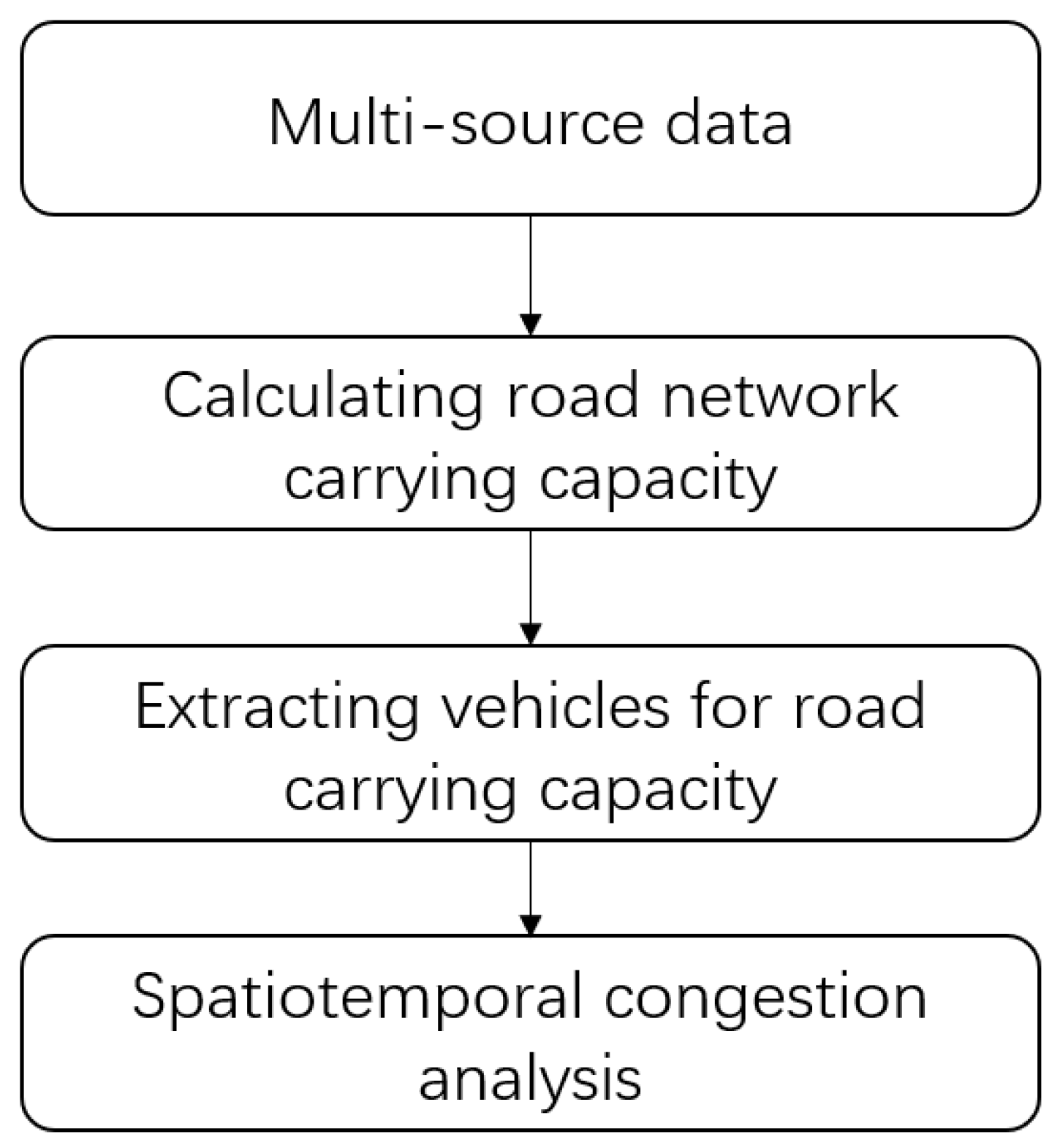
3.2.1. Overview of Proposed Method
3.2.2. Calculation Model of Road Network Carrying Capacity
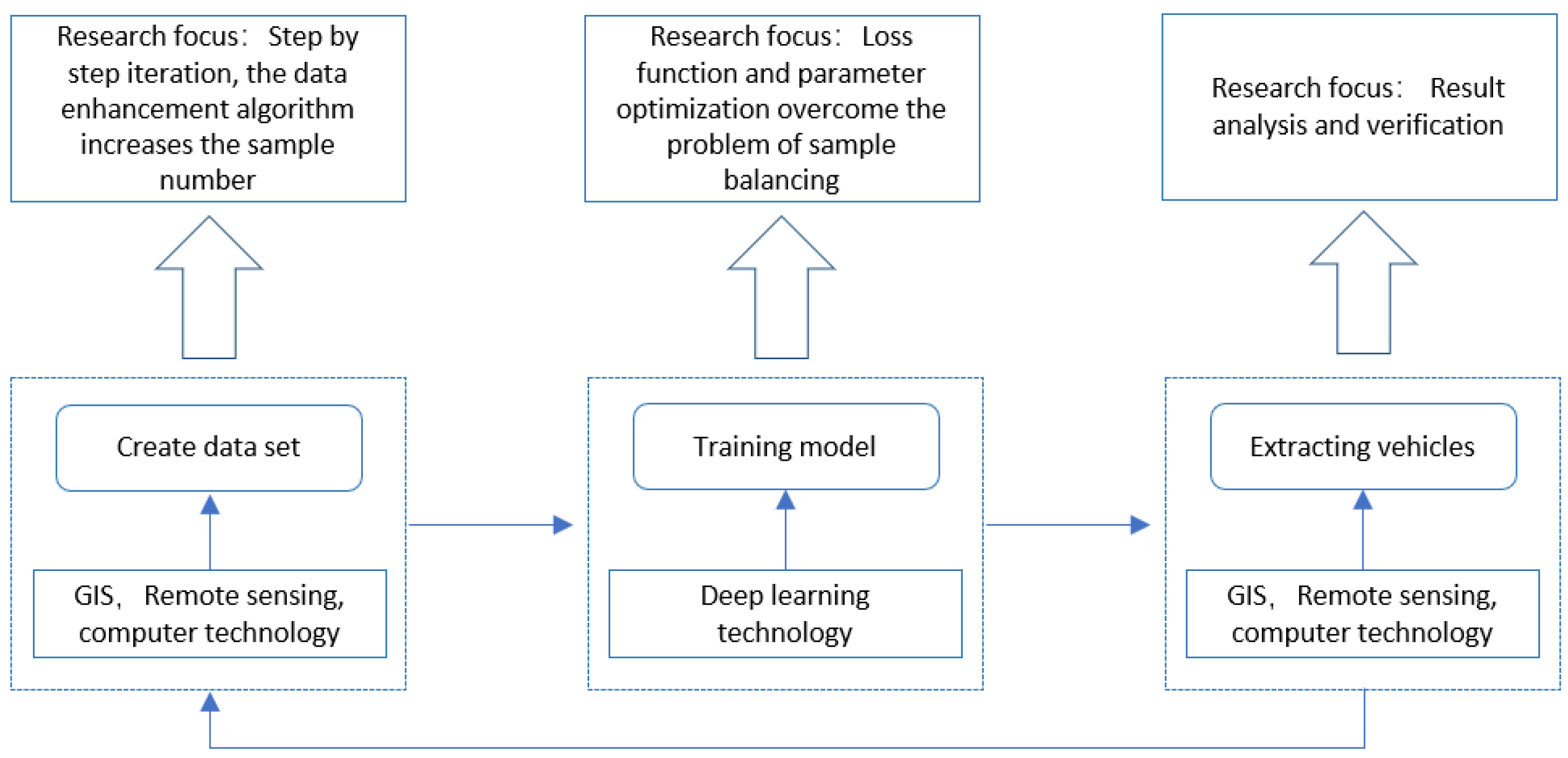
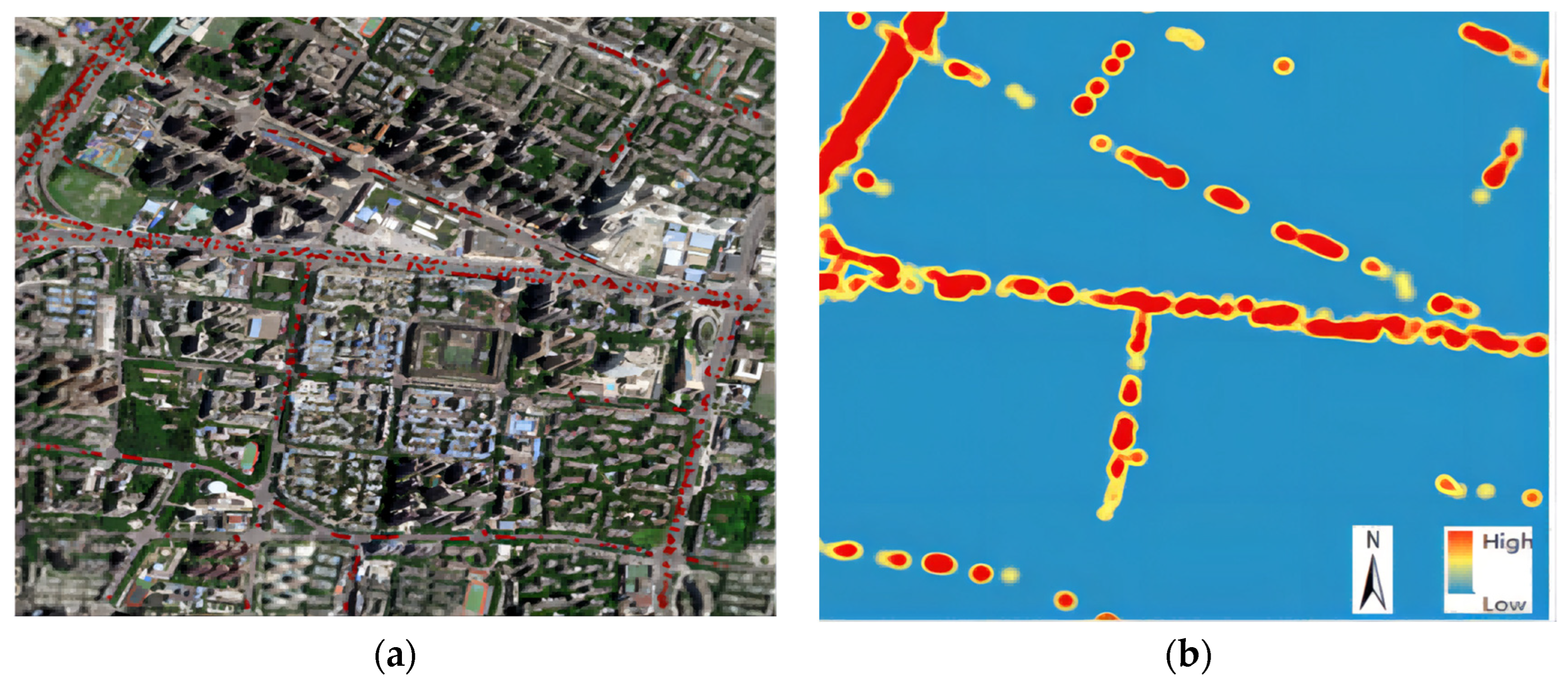
3.2.3. Calculation of Road Carrying Capacity Based on Number of Motor Vehicles
3.2.4. A Spatiotemporal Analysis Method for Congestion Management through Calculation of Road Carrying Capacity
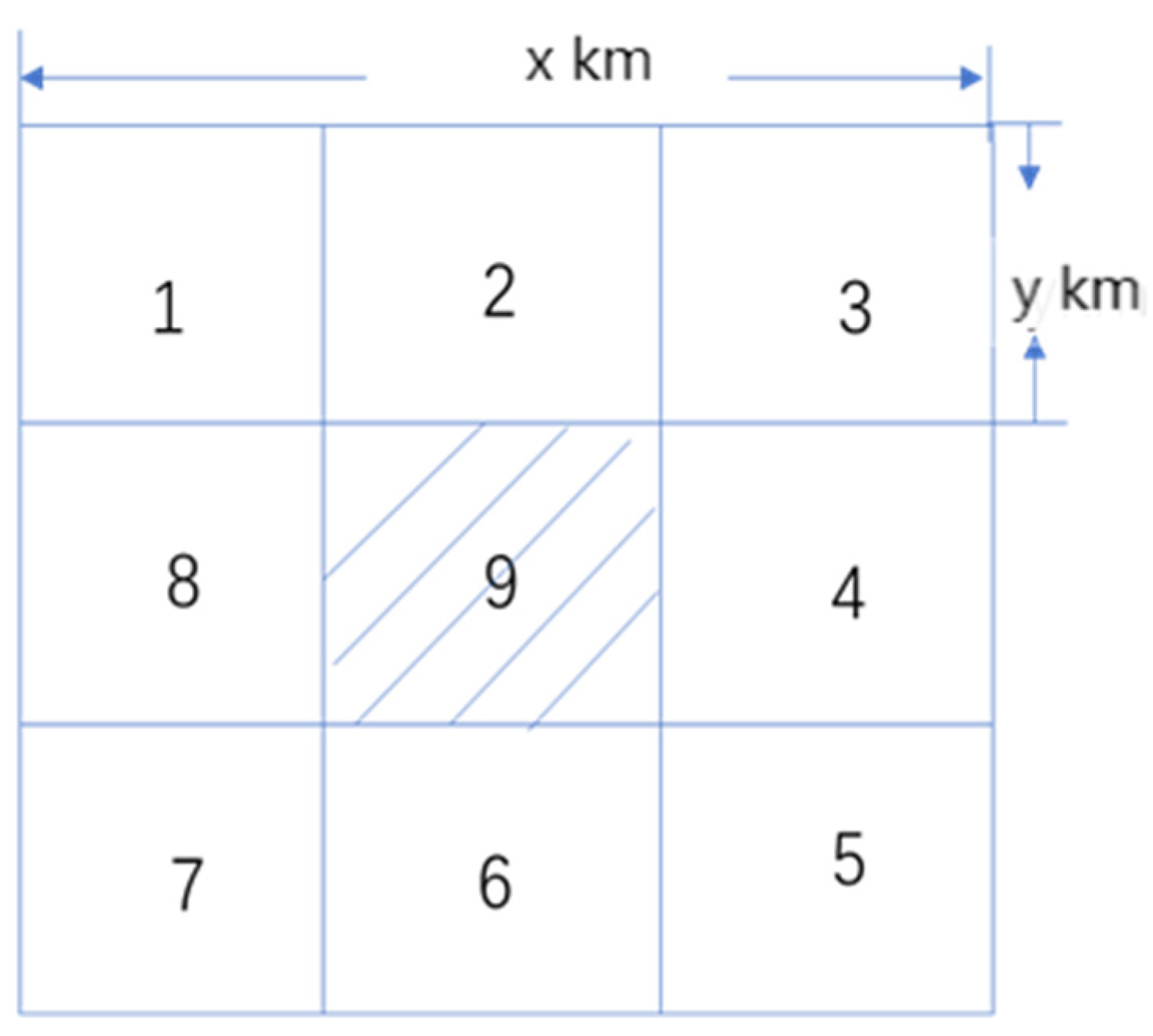
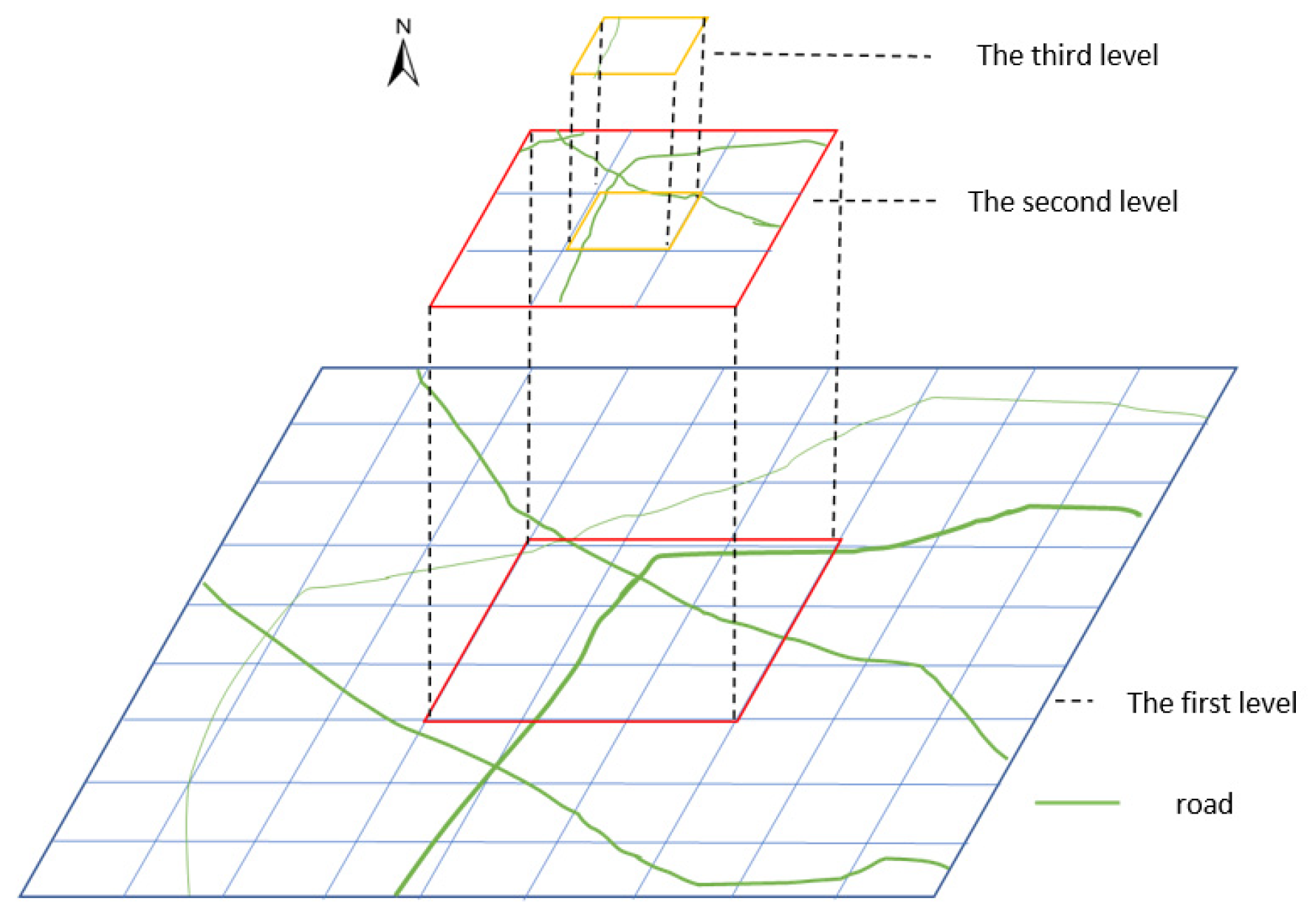
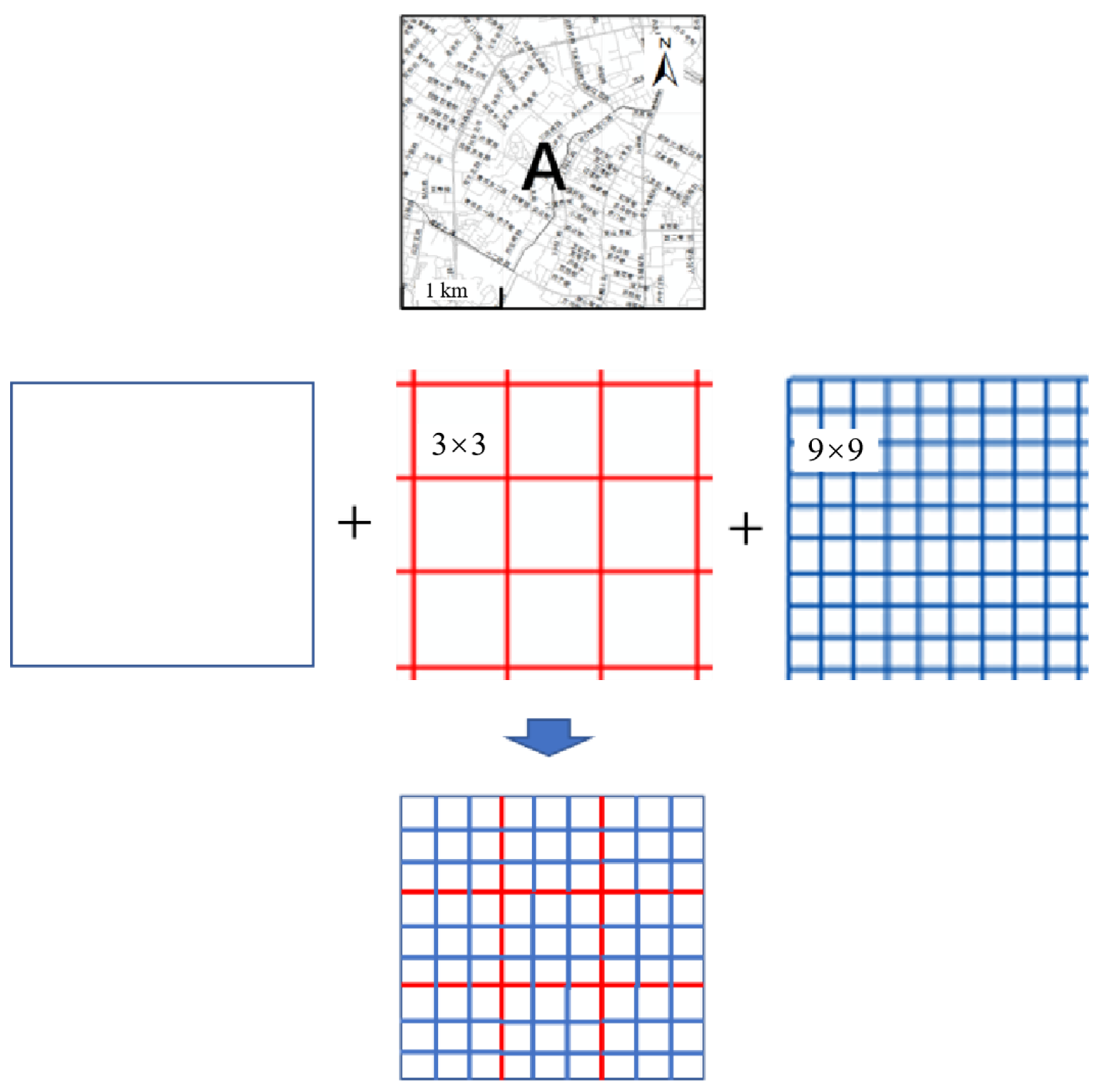
- A Road Network Carrying Capacity Balance Model Based on Geospatial Grids
- 2.
- Analysis of spatiotemporal changes in urban road congestion and spatiotemporal detection of impact factors
4. Case Study and Results Analysis
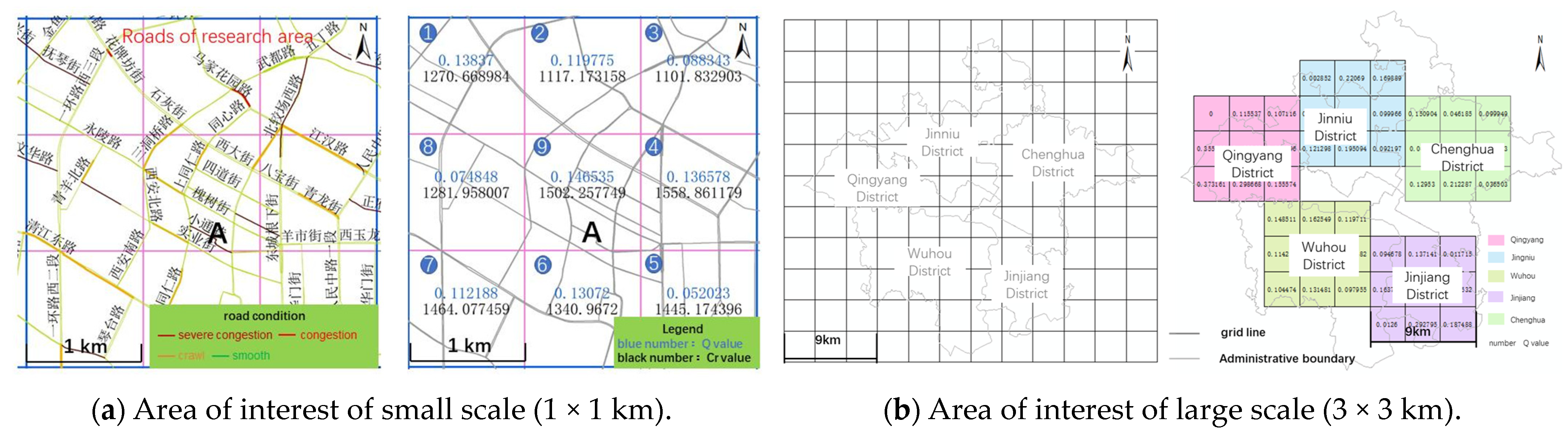
4.1. Analysis of Road Carrying Capacity Balance
4.2. Analysis of Road Congestion Status and Impact Factors
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Afrin, T.; Yodo, N. A Survey of Road Traffic Congestion Measures towards a Sustainable and Resilient Transportation System. Sustainability 2020, 12, 4660. [Google Scholar] [CrossRef]
- Wei, X.; Shen, L.; Li, J.; Du, X. An alternative method for assessing urban transportation carrying capacity. Ecol. Indic. 2022, 142, 109299. [Google Scholar] [CrossRef]
- Dubey, P.P.; Borkar, P. Review on techniques for traffic jam detection and congestion avoidance. In Proceedings of the 2015 2nd International Conference on Electronics and Communication Systems (ICECS), Coimbatore, India, 26–27 February 2015; pp. 434–440. [Google Scholar]
- Song, J.; Zhao, C.; Zhong, S.; Nielsen, T.A.S.; Prishchepov, A.V. Mapping spatio-temporal patterns and detecting the factors of traffic congestion with multi-source data fusion and mining techniques. Comput. Environ. Urban Syst. 2019, 77, 101364. [Google Scholar] [CrossRef]
- De-Ren, L. On Generalized and Specialized Spatial Information Grid. J. Remote Sens. 2005, 9, 513–520. [Google Scholar] [CrossRef]
- Gao, P.; Liu, Z.; Tian, K.; Liu, G. Characterizing Traffic Conditions from the Perspective of Spatial-Temporal Heterogeneity. ISPRS Int. J. Geo-Inf. 2016, 5, 34. [Google Scholar] [CrossRef]
- Shariff, M.A.; Faheem, M.I. A study on traffic carrying capacity of urban arterials under mixed traffic conditions. Int. J. Eng. Res. Ind. Appl. 2013, 6, 209–228. [Google Scholar]
- Li, X.; Wang, L.; Fan, Y. Literature Review on Urban Road Traffic Carrying Capacity. J. Transp. Syst. Eng. Inf. Technol. 2022, 22, 15. [Google Scholar]
- Jiang, D.; Zhao, W.; Wang, Y.; Wan, B. Analysis of urban road spatiotemporal situation by geographically weighted regression with spatial grid computing method. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 988–996. [Google Scholar] [CrossRef]
- Gao, Y.; Qu, Z.; Song, X.; Yun, Z.; Zhu, F. Coordinated perimeter control of urban road network based on traffic carrying capacity model. Simul. Model. Pract. Theory 2023, 123, 102680. [Google Scholar] [CrossRef]
- Iida, Y. Methodology for maximum capacity of road network. Transl. Jpn. Soc. Civ. Eng. 1972, 22, 147–150. [Google Scholar] [CrossRef]
- Sumalee, A.; Kurauchi, F. Network capacity reliability analysis considering traffic regulation after a major disaster. Netw. Spat. Econ. 2006, 6, 205–219. [Google Scholar] [CrossRef]
- Arasan, V.T.; Arkatkar, S. Derivation of capacity standards for intercity roads carrying heterogeneous traffic using computer simulation. Procedia-Soc. Behav. Sci. 2011, 16, 218–229. [Google Scholar] [CrossRef]
- Chao, C.; Zhang, Y. Study on traffic carrying capacity of Tangshan city. In Proceedings of the International Conference on Computer Science and Service System (CSSS), Nanjing, China, 27–29 June 2011; pp. 2642–2646. [Google Scholar]
- Fenton, R.E. A headway safety policy for automated highway operations. IEEE Trans. Veh. Technol. 1979, 28, 22–28. [Google Scholar] [CrossRef]
- Yuan, Z.; Wang, T.; Zhang, J.; Li, S. Influences of dynamic safe headway on car-following behavior. Phys. A: Stat. Mech. Its Appl. 2022, 591, 126697. [Google Scholar] [CrossRef]
- Kim, M.; Lee, J. A data transformation method for visualizing the statistical information based on the grid. Spat. Inf. Res. 2015, 23, 31–40. [Google Scholar]
- Tollefsen, A.F.; Strand, H.; Buhaug, H. PRIO-GRID: A unified spatial data structure. J. Peace Res. 2012, 49, 363–374. [Google Scholar] [CrossRef]
- Li, D.; Shao, Z.; Zhu, X. Spatial Information Multi-grid and Its Typical Application. Geomat. Inf. Sci. Wuhan Univ. 2004, 29, 945–950. [Google Scholar]
- Shi, J.; Chen, L.; Qiao, F.; Yu, L.; Li, Q.; Fan, G. Simulation and analysis of the carrying capacity for road networks using a grid-based approach. J. Traffic Transp. Eng. 2020, 7, 498–506. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, X.; Wang, Y.; Yang, Z.; Wu, J. Grid mapping for spatial pattern analyses of recurrent urban traffic congestion based on taxi GPS sensing data. Sustainability 2017, 9, 533. [Google Scholar] [CrossRef]
- Ye, S.; He, Z.; Jia, Y.; Luo, J. Analysis of spatial heterogeneity and influencing factors of urban traffic congestion based on gis. In Proceedings of the 2020 3rd International Conference on Geoinformatics and Data Analysis, Paris, France, 15–17 April 2020; pp. 48–52. [Google Scholar]
- Lakshna, A.; Ramesh, K.; Prabha, B.; Sheema, D.; Vijayakumar, K. Machine learning Smart Traffic Prediction and Congestion Reduction. In Proceedings of the 2021 International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems (ICSES), Chennai, India, 24–25 September 2021; pp. 1–4. [Google Scholar]
- Yu, J.; Zeng, P.; Yu, Y.; Yu, H.; Huang, L.; Zhou, D. A Combined Convolutional Neural Network for Urban Land-Use Classification with GIS Data. Remote Sens. 2022, 14, 1128. [Google Scholar] [CrossRef]
- Sharma, G.; Joshi, A.M.; Mohanty, S.P. sTrade: Blockchain based secure energy trading using vehicle-to-grid mutual authentication in smart transportation. Sustain. Energy Technol. Assess. 2023, 57, 103296. [Google Scholar] [CrossRef]
- Li, Y.; Lin, H.; Jin, J. Decision-making for sustainable urban transportation: A statistical exploration of innovative mobility solutions and reduced emissions. Sustain. Cities Soc. 2024, 102, 105219. [Google Scholar] [CrossRef]
- Harnischmacher, C.; Markefke, L.; Brendel, A.B.; Kolbe, L. Two-sided sustainability: Simulating battery degradation in vehicle to grid applications within autonomous electric port transportation. J. Clean. Prod. 2023, 384, 135598. [Google Scholar] [CrossRef]
- Pan, X.; Dang, Y.; Wang, H.; Hong, D.; Li, Y.; Deng, H. Resilience model and recovery strategy of transportation network based on travel OD-grid analysis. Reliab. Eng. Syst. Saf. 2022, 223, 108483. [Google Scholar] [CrossRef]
- Feng, T.; Liu, K.; Liang, C. An Improved Cellular Automata Traffic Flow Model Considering Driving Styles. Sustainability 2023, 15, 952. [Google Scholar] [CrossRef]
- Wahle, J.; Neubert, L.; Esser, J.; Schreckenberg, M. A cellular automaton traffic flow model for online simulation of traffic. Parallel Comput. 2001, 27, 719–735. [Google Scholar] [CrossRef]
- Zhang, S.; Shen, Y.; Zhao, Z. Design and implementation of a three-lane CA Traffic Flow model on ternary optical computer. Opt. Commun. 2020, 470, 125750. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, S.; Yao, Z.; Zhao, B.; Wang, Y. A cellular automata model for mixed traffic flow considering the driving behavior of connected automated vehicle platoons. Phys. A Stat. Mech. Its Appl. 2021, 582, 126262. [Google Scholar] [CrossRef]
- Thaysen, J.; Boisen, A.; Hansen, O.; Bouwstra, S. Atomic Force Microscopy Probe with Piezoresistive Read-out and a Highly Symmetrical Wheatstone Bridge Arrangement. Sens. Actuators A Phys. 2000, 83, 47–53. [Google Scholar] [CrossRef]
- Toaza, B.; Esztergár-Kiss, D. A review of metaheuristic algorithms for solving TSP-based scheduling optimization problems. Appl. Soft. Comput. 2023, 148, 110908. [Google Scholar] [CrossRef]
- Martínez-Salazar, I.A.; Molina, J.; Ángel-Bello, F.; Gómez, T.; Caballero, R. Solving a bi-objective Transportation Location Routing Problem by metaheuristic algorithms. Eur. J. Oper. Res. 2014, 234, 25–36. [Google Scholar] [CrossRef]
- Khasawneh, M.A.; Awasthi, A. Intelligent Meta-Heuristic-Based Optimization of Traffic Light Timing Using Artificial Intelligence Techniques. Electronics 2023, 12, 4968. [Google Scholar] [CrossRef]
- Waller, S.T.; Chand, S.; Zlojutro, A.; Nair, D.; Niu, C.; Wang, J.; Zhang, X.; Dixit, V.V. Rapidex: A Novel Tool to Estimate Origin–Destination Trips Using Pervasive Traffic Data. Sustainability 2021, 13, 11171. [Google Scholar] [CrossRef]
- Olayode, I.O.; Tartibu, L.K.; Okwu, M.O.; Ukaegbu, U.F. Development of a Hybrid Artificial Neural Network-Particle Swarm Optimization Model for the Modelling of Traffic Flow of Vehicles at Signalized Road Intersections. Appl. Sci. 2021, 11, 8387. [Google Scholar] [CrossRef]
- Rao, L.; Chen, F.; Zhou, H. Analysis of Traffic Accessibility in Tianfu New Area of Sichuan Province Based on Geographical Census. Geomat. Spat. Inf. Technol. 2019, 42, 72–74. [Google Scholar]
- Li, J.; Cao, J.; Zhu, Y.; Cheng, B. Built-up area detection from high resolution remote sensing images using geometric features. J. Remote Sens. 2020, 24, 233–244. [Google Scholar] [CrossRef]
- Peng, M. Division of Urban Spatial Information Multigrid Based on Hierarchical Spatial Reasoning. Geomat. Inf. Sci. Wuhan Univ. 2010, 35, 1112–1115. [Google Scholar]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A theory of traffic flow on long crowded roads. Proc. R. Soc. London. Ser. A. Math. Phys. Sci. 1955, 229, 317–345. [Google Scholar] [CrossRef]
- Wang, J.; Xu, C. Geodetector: Principle and prospective. Acta Geogr. Sin. 2017, 73, 219–231. [Google Scholar] [CrossRef]
- Zhou, D.; Jiang, G.; Yu, J.; Liu, L.; Li, W. The Analysis of Task and Data Characteristic and the Collaborative Processing Method in Real-Time Visualization Pipeline of Urban 3DGIS. ISPRS Int. J. Geo-Inf. 2017, 6, 69. [Google Scholar] [CrossRef]
- Tsitsokas, D.; Kouvelas, A.; Geroliminis, N. Modeling and optimization of dedicated bus lanes space allocation in large networks with dynamic congestion. Transp. Res. Part C: Emerg. Technol. 2021, 127, 103082. [Google Scholar] [CrossRef]
- Przewozniczek, M.W.; Goścień, R.; Lechowicz, P.; Walkowiak, K. Metaheuristic algorithms with solution encoding mixing for effective optimization of SDM optical networks. Eng. Appl. Artif. Intell. 2020, 95, 103843. [Google Scholar] [CrossRef]
- Almasi, M.H.; Oh, Y.; Sadollah, A.; Byon, Y.-J.; Kang, S. Urban transit network optimization under variable demand with single and multi-objective approaches using metaheuristics: The case of Daejeon, Korea. Int. J. Sustain. Transp. 2020, 15, 386–406. [Google Scholar] [CrossRef]
- Liu, Q.; Li, X.; Liu, H.; Guo, Z. Multi-objective metaheuristics for discrete optimization problems: A review of the state-of-the-art. Appl. Soft Comput. 2020, 93, 106382. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Category | Format | Area | Date | Coordinate System | Sample |
|---|---|---|---|---|---|
| Routers from Amap | Vector | Chengdu city | 2015 | GCJ-02 |  |
| Routers from Amap | Vector | Main districts of Chengdu | 2018 | GCJ-02 |  |
| POIs from Amap | Vector | Chengdu city | 2015 | GCJ-02 |  |
| POIs from Baidu | Vector | Chengdu city | 2018 | B D-09 |  |
| Actual operating conditions of road traffic | CSV | Chengdu city | 2018 | WGS-84 |  |
| Remote sensing images | Raster | Chengdu city | 2018–2019 | WGS-84 |  |
| Factor | Road Network Density | Bus Network Density | Node Density | Carrying Capacity | Bus Stop Coverage Rate |
|---|---|---|---|---|---|
| Road network | 0.113632568 | ||||
| Bus network density | 0.325978842 | 0.228960028 | |||
| Node density | 0.313461364 | 0.435280958 | 0.121162787 | ||
| Carrying capacity | 0.216198816 | 0.348898826 | 0.368858841 | 0.164306987 | |
| Bus stop coverage rate | 0.433570493 | 0.473625342 | 0.446629476 | 0.405571841 | 0.315829605 |
| Factors | Previous Models | Proposed Model |
|---|---|---|
| Road network key element extraction | Multi-steps using GIS tools and image processing tools | One-step extraction using deep learning method |
| Road network carrying capacity calculation | Difficulty in obtaining correction coefficients | Spatiotemporal analysis with grids to obtain results quickly |
| Balance analysis of regional road network carrying capacity | The inversion calculation of multiple types of data is complex and difficult | Nine-cell-grid balanced regression analysis |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, D.; Zhao, W.; Wang, Y.; Wan, B. A Spatiotemporal Hierarchical Analysis Method for Urban Traffic Congestion Optimization Based on Calculation of Road Carrying Capacity in Spatial Grids. ISPRS Int. J. Geo-Inf. 2024, 13, 59. https://doi.org/10.3390/ijgi13020059
Jiang D, Zhao W, Wang Y, Wan B. A Spatiotemporal Hierarchical Analysis Method for Urban Traffic Congestion Optimization Based on Calculation of Road Carrying Capacity in Spatial Grids. ISPRS International Journal of Geo-Information. 2024; 13(2):59. https://doi.org/10.3390/ijgi13020059
Chicago/Turabian StyleJiang, Dong, Wenji Zhao, Yanhui Wang, and Biyu Wan. 2024. "A Spatiotemporal Hierarchical Analysis Method for Urban Traffic Congestion Optimization Based on Calculation of Road Carrying Capacity in Spatial Grids" ISPRS International Journal of Geo-Information 13, no. 2: 59. https://doi.org/10.3390/ijgi13020059
APA StyleJiang, D., Zhao, W., Wang, Y., & Wan, B. (2024). A Spatiotemporal Hierarchical Analysis Method for Urban Traffic Congestion Optimization Based on Calculation of Road Carrying Capacity in Spatial Grids. ISPRS International Journal of Geo-Information, 13(2), 59. https://doi.org/10.3390/ijgi13020059