

A Review of Crowdsourcing Update Methods for High-Definition Maps


Abstract
:1. Introduction
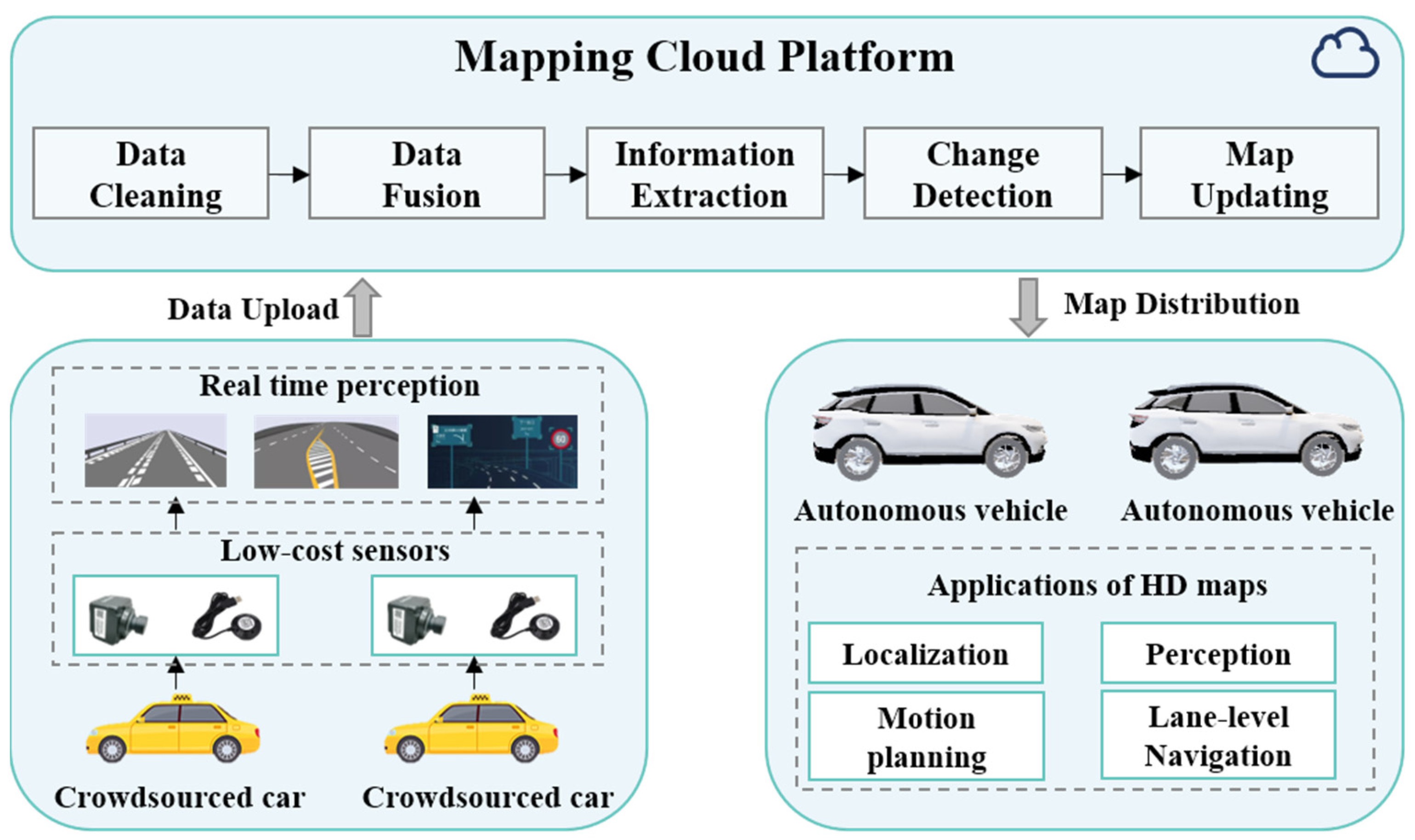
2. The Framework of Crowdsourced Updating
3. Crowdsourced Data Collection for HD Maps Updating
3.1. GNSS-Based Data-Collection Methods
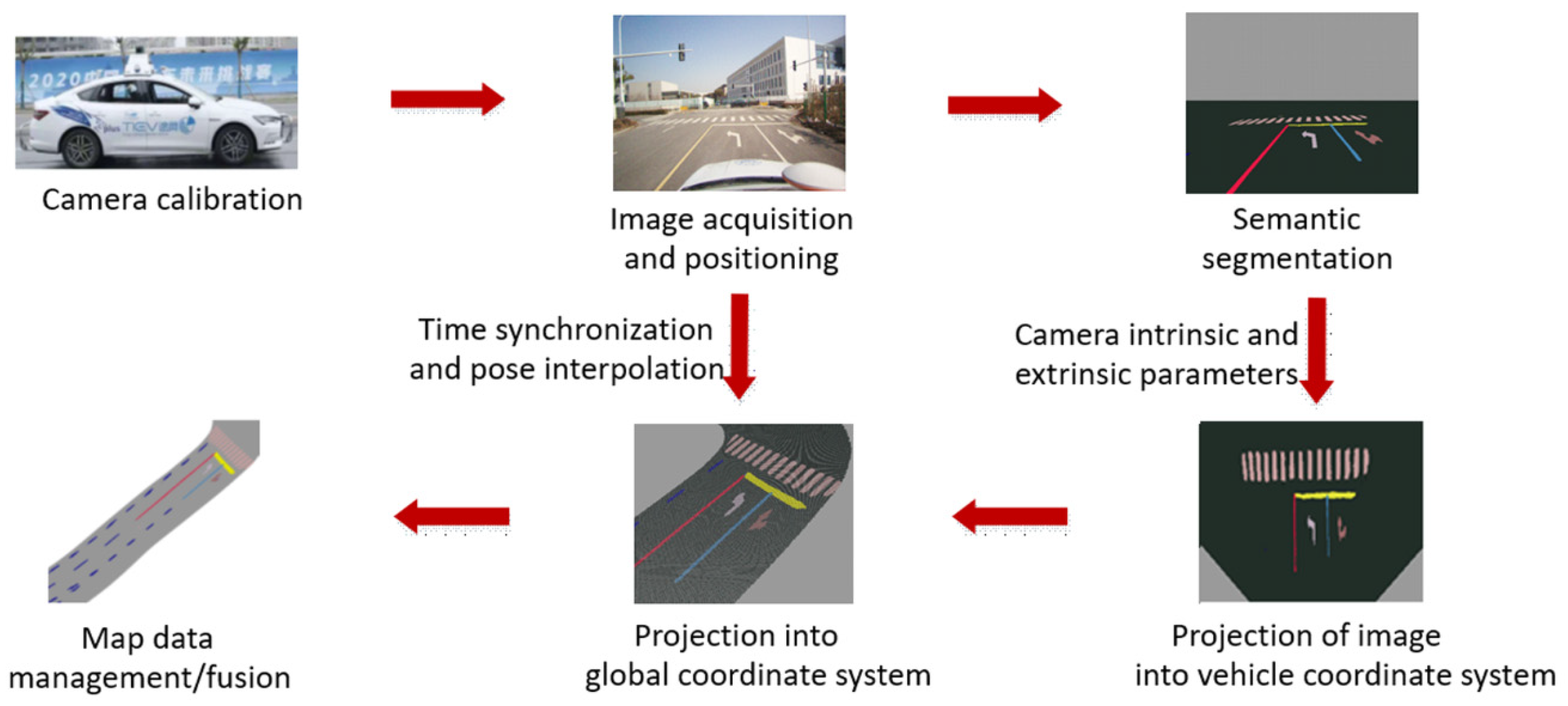
3.2. Camera-Based Data-Collection Methods
3.3. LiDAR-Based Data-Collection Methods
4. Information Extraction Methods Form Crowdsourced Data
4.1. Vehicle-End Information Extraction
4.1.1. Real-Time Detection of Road Information
4.1.2. Local Map Reconstruction
4.2. Cloud-End Information Extraction
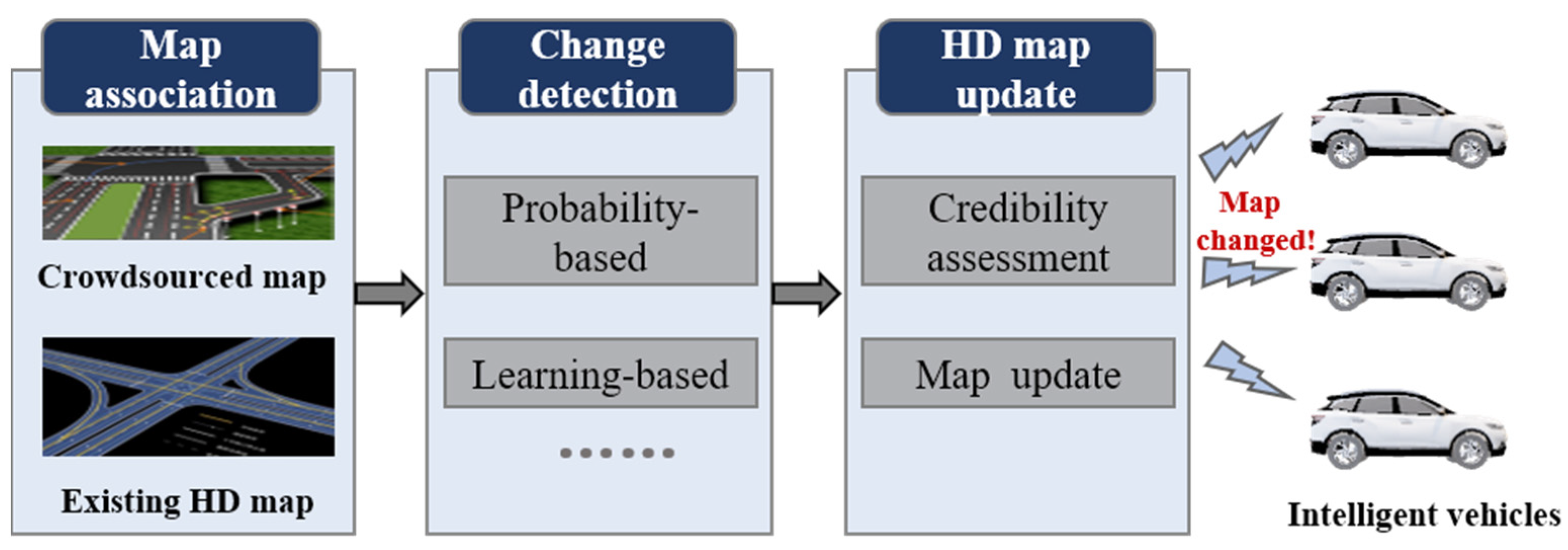
5. Crowdsourcing Update for HD Maps
5.1. Probabilistic-Based Approaches
5.2. Learning-Based Approaches
6. Challenges
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jones, A.; Blake, C.; Davies, C.; Scanlon, E. Digital maps for learning: A review and prospects. Comput. Educ. 2004, 43, 91–107. [Google Scholar] [CrossRef]
- Jiang, L.; Liang, Q.; Qi, Q.; Ye, Y.; Liang, X. The heritage and cultural values of ancient Chinese maps. J. Geogr. Sci. 2017, 27, 1521–1540. [Google Scholar] [CrossRef]
- Black, J. Maps and History: Constructing Images of the Past; Yale University Press: New Haven, CT, USA, 2000; ISBN 978-0-300-08693-5. [Google Scholar]
- Elghazaly, G.; Frank, R.; Harvey, S.; Safko, S. High-Definition Maps: Comprehensive Survey, Challenges, and Future Perspectives. IEEE Open J. Intell. Transp. Syst. 2023, 4, 527–550. [Google Scholar] [CrossRef]
- Liu, R.; Wang, J.; Zhang, B. High Definition Map for Automated Driving: Overview and Analysis. J. Navig. 2020, 73, 324–341. [Google Scholar] [CrossRef]
- SAE J3016 Automated-Driving Graphic. Available online: https://www.sae.org/site/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 22 November 2023).
- Ye, S.; Fu, Y.; Wang, W.; Pan, Z. Creation of high definition map for autonomous driving within specific scene. In Proceedings of the International Conference on Smart Transportation and City Engineering 2021, Chongqing, China, 6–8 August 2021; SPIE: Bellingham, WA, USA, 2021; Volume 12050, pp. 1365–1373. [Google Scholar]
- Seif, H.G.; Hu, X. Autonomous Driving in the iCity—HD Maps as a Key Challenge of the Automotive Industry. Engineering 2016, 2, 159–162. [Google Scholar] [CrossRef]
- Poggenhans, F.; Pauls, J.-H.; Janosovits, J.; Orf, S.; Naumann, M.; Kuhnt, F.; Mayr, M. Lanelet2: A high-definition map framework for the future of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1672–1679. [Google Scholar]
- Guo, X.; Cao, Y.; Zhou, J.; Huang, Y.; Li, B. HDM-RRT: A Fast HD-Map-Guided Motion Planning Algorithm for Autonomous Driving in the Campus Environment. Remote Sens. 2023, 15, 487. [Google Scholar] [CrossRef]
- Jian, Z.; Zhang, S.; Chen, S.; Lv, X.; Zheng, N. High-Definition Map Combined Local Motion Planning and Obstacle Avoidance for Autonomous Driving. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; 2019; pp. 2180–2186. [Google Scholar]
- Huang, Y.; Zhou, J.; Li, X.; Dong, Z.; Xiao, J.; Wang, S.; Zhang, H. MENet: Map-enhanced 3D object detection in bird’s-eye view for LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2023, 120, 103337. [Google Scholar] [CrossRef]
- Fang, J.; Zhou, D.; Song, X.; Zhang, L. MapFusion: A General Framework for 3D Object Detection with HDMaps. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3406–3413. [Google Scholar]
- Shin, D.; Park, K.; Park, M. High Definition Map-Based Localization Using ADAS Environment Sensors for Application to Automated Driving Vehicles. Appl. Sci. 2020, 10, 4924. [Google Scholar] [CrossRef]
- HERE HD Live Map|Autonomous Driving System|Platform|HERE. Available online: https://www.here.com/platform/HD-live-map (accessed on 2 February 2024).
- HD Map. Available online: https://www.tomtom.com/products/hd-map/ (accessed on 2 February 2024).
- Ye, C.; Zhao, H.; Ma, L.; Jiang, H.; Li, H.; Wang, R.; Chapman, M.A.; Junior, J.M.; Li, J. Robust Lane Extraction From MLS Point Clouds Towards HD Maps Especially in Curve Road. IEEE Trans. Intell. Transport. Syst. 2022, 23, 1505–1518. [Google Scholar] [CrossRef]
- Bao, Z.; Hossain, S.; Lang, H.; Lin, X. A review of high-definition map creation methods for autonomous driving. Eng. Appl. Artif. Intell. 2023, 122, 106125. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y.; Xiang, L.; Wu, T. Urban Road Lane Number Mining from Low-Frequency Floating Car Data Based on Deep Learning. ISPRS Int. J. Geo-Inf. 2023, 12, 467. [Google Scholar] [CrossRef]
- Neuhold, R.; Haberl, M.; Fellendorf, M.; Pucher, G.; Dolancic, M.; Rudigier, M.; Pfister, J. Generating a Lane-Specific Transportation Network Based on Floating-Car Data. In Advances in Human Aspects of Transportation; Stanton, N.A., Landry, S., Di Bucchianico, G., Vallicelli, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1025–1037. [Google Scholar]
- Yang, X.; Tang, L.; Stewart, K.; Dong, Z.; Zhang, X.; Li, Q. Automatic change detection in lane-level road networks using GPS trajectories. Int. J. Geogr. Inf. Sci. 2018, 32, 601–621. [Google Scholar] [CrossRef]
- Dolancic, M. Automatic lane-level road network graph-generation from Floating Car Data Page. GI Forum 2016, 4, 231–242. [Google Scholar] [CrossRef]
- Arman, M.A.; Tampère, C.M.J. Road centreline and lane reconstruction from pervasive GPS tracking on motorways. Procedia Comput. Sci. 2020, 170, 434–441. [Google Scholar] [CrossRef]
- Li, X.; Wu, Y.; Tan, Y.; Cheng, P.; Wu, J.; Wang, Y. Method Based on Floating Car Data and Gradient-Boosted Decision Tree Classification for the Detection of Auxiliary Through Lanes at Intersections. ISPRS Int. J. Geo-Inf. 2018, 7, 317. [Google Scholar] [CrossRef]
- Kan, Z.; Tang, L.; Kwan, M.-P.; Ren, C.; Liu, D.; Li, Q. Traffic congestion analysis at the turn level using Taxis’ GPS trajectory data. Comput. Environ. Urban Syst. 2019, 74, 229–243. [Google Scholar] [CrossRef]
- Fan, L.; Zhang, J.; Wan, C.; Fu, Z.; Shao, S. Lane-Level Road Map Construction considering Vehicle Lane-Changing Behavior. J. Adv. Transp. 2022, 2022, e6040122. [Google Scholar] [CrossRef]
- Dabeer, O.; Ding, W.; Gowaiker, R.; Grzechnik, S.K.; Lakshman, M.J.; Lee, S.; Reitmayr, G.; Sharma, A.; Somasundaram, K.; Sukhavasi, R.T.; et al. An end-to-end system for crowdsourced 3D maps for autonomous vehicles: The mapping component. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 634–641. [Google Scholar]
- Herb, M.; Weiherer, T.; Navab, N.; Tombari, F. Crowd-sourced Semantic Edge Mapping for Autonomous Vehicles. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 7047–7053. [Google Scholar]
- Guo, C.; Kidono, K.; Meguro, J.; Kojima, Y.; Ogawa, M.; Naito, T. A Low-Cost Solution for Automatic Lane-Level Map Generation Using Conventional In-Car Sensors. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2355–2366. [Google Scholar] [CrossRef]
- Jang, W.; An, J.; Lee, S.; Cho, M.; Sun, M.; Kim, E. Road Lane Semantic Segmentation for High Definition Map. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1001–1006. [Google Scholar]
- Qin, T.; Huang, H.; Wang, Z.; Chen, T.; Ding, W. Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario. IEEE Robot. Autom. Lett. 2023, 8, 5077–5083. [Google Scholar] [CrossRef]
- Bu, T.; Mertz, C.; Dolan, J. Toward Map Updates with Crosswalk Change Detection Using a Monocular Bus Camera. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–8. [Google Scholar]
- Kim, K.; Cho, S.; Chung, W. HD Map Update for Autonomous Driving with Crowdsourced Data. IEEE Robot. Autom. Lett. 2021, 6, 1895–1901. [Google Scholar] [CrossRef]
- Zhou, J.; Guo, Y.; Bian, Y.; Huang, Y.; Li, B. Lane Information Extraction for High Definition Maps Using Crowdsourced Data. IEEE Trans. Intell. Transp. Syst. 2023, 24, 7780–7790. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, C.; Gao, C.; Yu, W.; Cai, Y.; Ma, C. Lane Information Perception Network for HD Maps. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Chawla, H.; Jukola, M.; Brouns, T.; Arani, E.; Zonooz, B. Crowdsourced 3D Mapping: A Combined Multi-View Geometry and Self-Supervised Learning Approach. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 4750–4757. [Google Scholar]
- Szabó, L.; Lindenmaier, L.; Tihanyi, V. Smartphone Based HD Map Building for Autonomous Vehicles. In Proceedings of the 2019 IEEE 17th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 24–26 January 2019; pp. 365–370. [Google Scholar]
- Golovnin, O.K.; Rybnikov, D.V. Video Processing Method for High-Definition Maps Generation. In Proceedings of the 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 6–9 October 2020; pp. 1–5. [Google Scholar]
- Das, A.; IJsselmuiden, J.; Dubbelman, G. Pose-graph based Crowdsourced Mapping Framework. In Proceedings of the 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–7. [Google Scholar]
- Jeong, J.; Cho, Y.; Kim, A. Road-SLAM: Road marking based SLAM with lane-level accuracy. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1736–1743. [Google Scholar]
- Lagahit, M.L.R.; Tseng, Y.H. A preliminary study on updating high definition maps: Detecting and positioning a traffic cone by using a stereo camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-4-W19, 271–274. [Google Scholar] [CrossRef]
- Dannheim, C.; Maeder, M.; Dratva, A.; Raffero, M.; Neumeier, S.; Icking, C. A cost-effective solution for HD Maps creation. In Proceedings of the AmE 2017—Automotive meets Electronics; 8th GMM-Symposium, Dortmund, Germany, 7–8 March 2017; pp. 1–5. [Google Scholar]
- Kim, C.; Cho, S.; Sunwoo, M.; Resende, P.; Bradai, B.; Jo, K. Updating Point Cloud Layer of High Definition (HD) Map Based on Crowd-Sourcing of Multiple Vehicles Installed LiDAR. IEEE Access 2021, 9, 8028–8046. [Google Scholar] [CrossRef]
- Kim, C.; Cho, S.; Sunwoo, M.; Resende, P.; Bradaï, B.; Jo, K. Cloud Update of Geodetic Normal Distribution Map Based on Crowd-Sourcing Detection against Road Environment Changes. J. Adv. Transp. 2022, 2022, e4486177. [Google Scholar] [CrossRef]
- Liu, Q.; Han, T.; Xie, J.; Kim, B. Real-Time Dynamic Map With Crowdsourcing Vehicles in Edge Computing. IEEE Trans. Intell. Veh. 2023, 8, 2810–2820. [Google Scholar] [CrossRef]
- Chen, G.H.; Zhou, W.; Wang, F.J.; Xiao, B.J.; Dai, S.F. Lane Detection Based on Improved Canny Detector and Least Square Fitting. Adv. Mater. Res. 2013, 765–767, 2383–2387. [Google Scholar] [CrossRef]
- Talib, M.L.; Ramli, S. A Review of Multiple Edge Detection in Road Lane Detection Using Improved Hough Transform. Adv. Mater. Res. 2015, 1125, 541–545. [Google Scholar] [CrossRef]
- Wijaya, B.; Jiang, K.; Yang, M.; Wen, T.; Tang, X.; Yang, D. Crowdsourced Road Semantics Mapping Based on Pixel-Wise Confidence Level. Automot. Innov. 2022, 5, 43–56. [Google Scholar] [CrossRef]
- Liang, T.; Bao, H.; Pan, W.; Pan, F. Traffic Sign Detection via Improved Sparse R-CNN for Autonomous Vehicles. J. Adv. Transp. 2022, 2022, e3825532. [Google Scholar] [CrossRef]
- Gavrilescu, R.; Zet, C.; Foșalău, C.; Skoczylas, M.; Cotovanu, D. Faster R-CNN:an Approach to Real-Time Object Detection. In Proceedings of the 2018 International Conference and Exposition on Electrical And Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 0165–0168. [Google Scholar]
- Ren, K.; Huang, L.; Fan, C.; Han, H.; Deng, H. Real-time traffic sign detection network using DS-DetNet and lite fusion FPN. J. Real-Time Image Proc. 2021, 18, 2181–2191. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Dong, Z.; Gao, M. Improved YOLOv5 network for real-time multi-scale traffic sign detection. Neural Comput. Appl. 2023, 35, 7853–7865. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Ye, Y.; Lau, R.Y.K.; Zhang, X.; Huang, X. Road Detection and Centerline Extraction Via Deep Recurrent Convolutional Neural Network U-Net. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7209–7220. [Google Scholar] [CrossRef]
- Mahmud, M.N.; Osman, M.K.; Ismail, A.P.; Ahmad, F.; Ahmad, K.A.; Ibrahim, A. Road Image Segmentation using Unmanned Aerial Vehicle Images and DeepLab V3+ Semantic Segmentation Model. In Proceedings of the 2021 11th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–28 August 2021; pp. 176–181. [Google Scholar]
- Mani, K.; Daga, S.; Garg, S.; Shankar, N.S.; Krishna Murthy, J.; Krishna, K.M. Mono Lay out: Amodal scene layout from a single image. In Proceedings of the 2020 IEEE Winter Conference on Applications of Computer Vision (WACV), Snowmass Village, CO, USA, 1–5 March 2020; pp. 1678–1686. [Google Scholar]
- Wang, Z.; Ren, W.; Qiu, Q. LaneNet: Real-Time Lane Detection Networks for Autonomous Driving. arXiv 2018, arXiv:1807.01726. [Google Scholar] [CrossRef]
- Zheng, T.; Huang, Y.; Liu, Y.; Tang, W.; Yang, Z.; Cai, D.; He, X. CLRNet: Cross Layer Refinement Network for Lane Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 898–907. Available online: https://openaccess.thecvf.com/content/CVPR2022/html/Zheng_CLRNet_Cross_Layer_Refinement_Network_for_Lane_Detection_CVPR_2022_paper.html (accessed on 4 February 2024).
- Tian, W.; Ren, X.; Yu, X.; Wu, M.; Zhao, W.; Li, Q. Vision-based mapping of lane semantics and topology for intelligent vehicles. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102851. [Google Scholar] [CrossRef]
- Liang, D.; Guo, Y.; Zhang, S.; Zhang, S.-H.; Hall, P.; Zhang, M.; Hu, S. LineNet: A Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments. arXiv 2018, arXiv:1807.05696. [Google Scholar] [CrossRef]
- Szántó, M.; Kobál, S.; Vajta, L.; Horváth, V.G.; Lógó, J.M.; Barsi, Á. Building Maps Using Monocular Image-feeds from Windshield-mounted Cameras in a Simulator Environment. Period. Polytech. Civ. Eng. 2023, 67, 457–472. [Google Scholar] [CrossRef]
- Fisher, A.; Cannizzaro, R.; Cochrane, M.; Nagahawatte, C.; Palmer, J.L. ColMap: A memory-efficient occupancy grid mapping framework. Robot. Auton. Syst. 2021, 142, 103755. [Google Scholar] [CrossRef]
- Zhanabatyrova, A.; Souza Leite, C.F.; Xiao, Y. Automatic Map Update Using Dashcam Videos. IEEE Internet Things J. 2023, 10, 11825–11843. [Google Scholar] [CrossRef]
- Eyvazpour, R.; Shoaran, M.; Karimian, G. Hardware implementation of SLAM algorithms: A survey on implementation approaches and platforms. Artif. Intell. Rev. 2023, 56, 6187–6239. [Google Scholar] [CrossRef]
- Lim, K.L.; Bräunl, T. A Review of Visual Odometry Methods and Its Applications for Autonomous Driving. Available online: https://arxiv.org/abs/2009.09193v1 (accessed on 13 December 2023).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded Up Robust Features. In Proceedings of the Computer Vision—ECCV 2006, Graz, Austria, 7–13 May 2006; Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. In Proceedings of the Computer Vision—ECCV 2010, Heraklion, Greece, 5–11 September 2010; Daniilidis, K., Maragos, P., Paragios, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-Scale Direct Monocular SLAM. In Proceedings of the Computer Vision—ECCV 2014, Zurich, Switzerland, 6–12 September 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 834–849. [Google Scholar]
- Wang, S.; Clark, R.; Wen, H.; Trigoni, N. DeepVO: Towards end-to-end visual odometry with deep Recurrent Convolutional Neural Networks. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2043–2050. [Google Scholar]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. SuperPoint: Self-Supervised Interest Point Detection and Description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–23 June 2018; pp. 224–236. Available online: https://openaccess.thecvf.com/content_cvpr_2018_workshops/w9/html/DeTone_SuperPoint_Self-Supervised_Interest_CVPR_2018_paper.html (accessed on 4 February 2024).
- Loo, S.Y.; Amiri, A.J.; Mashohor, S.; Tang, S.H.; Zhang, H. CNN-SVO: Improving the Mapping in Semi-Direct Visual Odometry Using Single-Image Depth Prediction. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5218–5223. [Google Scholar]
- Sun, J.; Shen, Z.; Wang, Y.; Bao, H.; Zhou, X. LoFTR: Detector-Free Local Feature Matching With Transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 8922–8931. Available online: https://openaccess.thecvf.com/content/CVPR2021/html/Sun_LoFTR_Detector-Free_Local_Feature_Matching_With_Transformers_CVPR_2021_paper.html (accessed on 4 February 2024).
- Chen, C.; Wang, B.; Lu, C.X.; Trigoni, N.; Markham, A. A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence. arXiv 2020, arXiv:2006.12567. [Google Scholar] [CrossRef]
- Duan, C.; Junginger, S.; Huang, J.; Jin, K.; Thurow, K. Deep Learning for Visual SLAM in Transportation Robotics: A review. Transp. Saf. Environ. 2019, 1, 177–184. [Google Scholar] [CrossRef]
- Doer, C.; Henzler, M.; Messner, H.; Trommer, G.F. HD Map Generation from Vehicle Fleet Data for Highly Automated Driving on Highways. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 2014–2020. [Google Scholar]
- Liebner, M.; Jain, D.; Schauseil, J.; Pannen, D.; Hackeloer, A. Crowdsourced HD Map Patches Based on Road Model Inference and Graph-Based SLAM. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1211–1218. [Google Scholar]
- Zhang, P.; Zhang, M.; Liu, J. Real-Time HD Map Change Detection for Crowdsourcing Update Based on Mid-to-High-End Sensors. Sensors 2021, 21, 2477. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Y.; Wang, Y.; Zhao, H. HDMapNet: An Online HD Map Construction and Evaluation Framework. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 4628–4634. [Google Scholar]
- Liu, Y.; Yuan, T.; Wang, Y.; Wang, Y.; Zhao, H. VectorMapNet: End-to-end Vectorized HD Map Learning. In Proceedings of the 40th International Conference on Machine Learning, Honolulu, HI, USA, 23–29 July 2023; pp. 22352–22369. [Google Scholar]
- Liao, B.; Chen, S.; Wang, X.; Cheng, T.; Zhang, Q.; Liu, W.; Huang, C. MapTR: Structured Modeling and Learning for Online Vectorized HD Map Construction. arXiv 2023, arXiv:2208.14437. [Google Scholar] [CrossRef]
- Liao, B.; Chen, S.; Zhang, Y.; Jiang, B.; Zhang, Q.; Liu, W.; Huang, C.; Wang, X. MapTRv2: An End-to-End Framework for Online Vectorized HD Map Construction. arXiv 2023, arXiv:2308.05736. Available online: http://arxiv.org/abs/2308.05736 (accessed on 30 November 2023).
- Yuan, T.; Liu, Y.; Wang, Y.; Wang, Y.; Zhao, H. StreamMapNet: Streaming Mapping Network for Vectorized Online HD Map Construction. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 1–10 January 2024; pp. 7356–7365. Available online: https://openaccess.thecvf.com/content/WACV2024/html/Yuan_StreamMapNet_Streaming_Mapping_Network_for_Vectorized_Online_HD_Map_Construction_WACV_2024_paper.html (accessed on 5 February 2024).
- Qiao, L.; Ding, W.; Qiu, X.; Zhang, C. End-to-End Vectorized HD-Map Construction with Piecewise Bezier Curve. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 13218–13228. Available online: https://openaccess.thecvf.com/content/CVPR2023/html/Qiao_End-to-End_Vectorized_HD-Map_Construction_With_Piecewise_Bezier_Curve_CVPR_2023_paper.html (accessed on 30 November 2023).
- Yu, J.; Zhang, Z.; Xia, S.; Sang, J. ScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction. arXiv 2023, arXiv:2310.13378. [Google Scholar] [CrossRef]
- Ding, W.; Qiao, L.; Qiu, X.; Zhang, C. PivotNet: Vectorized Pivot Learning for End-to-end HD Map Construction. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Paris, France, 2–3 October 2023. [Google Scholar]
- Liao, B.; Chen, S.; Jiang, B.; Cheng, T.; Zhang, Q.; Liu, W.; Huang, C.; Wang, X. Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction. arXiv 2023, arXiv:2303.08815. [Google Scholar] [CrossRef]
- Ben Charrada, T.; Tabia, H.; Chetouani, A.; Laga, H. TopoNet: Topology Learning for 3D Reconstruction of Objects of Arbitrary Genus. Comput. Graph. Forum 2022, 41, 336–347. [Google Scholar] [CrossRef]
- Pannen, D.; Liebner, M.; Hempel, W.; Burgard, W. How to Keep HD Maps for Automated Driving Up To Date. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2288–2294. [Google Scholar]
- Kim, C.; Cho, S.; Sunwoo, M.; Jo, K. Crowd-Sourced Mapping of New Feature Layer for High-Definition Map. Sensors 2018, 18, 4172. [Google Scholar] [CrossRef]
- Ding, W.; Hou, S.; Gao, H.; Wan, G.; Song, S. LiDAR Inertial Odometry Aided Robust LiDAR Localization System in Changing City Scenes. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4322–4328. [Google Scholar]
- Jo, K.; Kim, C.; Sunwoo, M. Simultaneous Localization and Map Change Update for the High Definition Map-Based Autonomous Driving Car. Sensors 2018, 18, 3145. [Google Scholar] [CrossRef]
- Pannen, D.; Liebner, M.; Burgard, W. HD Map Change Detection with a Boosted Particle Filter. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 2561–2567. [Google Scholar]
- Li, B.; Song, D.; Kingery, A.; Zheng, D.; Xu, Y.; Guo, H. Lane Marking Verification for High Definition Map Maintenance Using Crowdsourced Images. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 2324–2329. [Google Scholar]
- Welte, A.; Xu, P.; Bonnifait, P.; Zinoune, C. HD Map Errors Detection using Smoothing and Multiple Drives. In Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV Workshops), Nagoya, Japan, 11–17 July 2021; p. 37. Available online: https://hal.science/hal-03521309 (accessed on 29 November 2023).
- Heo, M.; Kim, J.; Kim, S. HD Map Change Detection with Cross-Domain Deep Metric Learning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 10218–10224. [Google Scholar]
- Lambert, J.; Hays, J. Trust, but Verify: Cross-Modality Fusion for HD Map Change Detection. arXiv 2022, arXiv:2212.07312. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Centralized Update | Crowdsourced Update | |
|---|---|---|
| Sensors | High-precision sensors (LiDAR, stereo camera, GNSS, IMU) | Low-precision sensors (GNSS, camera) |
| Accuracy | Centimeter level | Decimeter level |
| Update Frequency | Low-update frequency (Quarterly/monthly) | High-update frequency (Monthly/weekly/daily) |
| Cost | High cost | Low cost |
| GNSS-Based | Camera-Based | LiDAR-Based | |
|---|---|---|---|
| Advantages | Cost-effective, extensive coverage, updates rapidly | Cost-effective, easily scalable, information-abundant | hHgh accuracy and robustness |
| Disadvantages | Low accuracy, limited information content | Environmentally sensitive | High cost, difficulty in widespread |
| SfM, VO, SLAM-Based Methods | End-to-End Methods | ||
|---|---|---|---|
| Traditional | Deep Learning-Based | ||
| Advantages | Mature and power-efficient | Strong adaptability to complex environments, efficient | Simplified workflow, adaptability, real-time capability |
| Disadvantages | Environment-sensitive, complex computations | High-computational resource requirements, high-data-volume demands | Challenges in acquiring large-scale training data, high-computational power requirements |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zhou, J.; Li, X.; Tang, Y.; Lv, Z. A Review of Crowdsourcing Update Methods for High-Definition Maps. ISPRS Int. J. Geo-Inf. 2024, 13, 104. https://doi.org/10.3390/ijgi13030104
Guo Y, Zhou J, Li X, Tang Y, Lv Z. A Review of Crowdsourcing Update Methods for High-Definition Maps. ISPRS International Journal of Geo-Information. 2024; 13(3):104. https://doi.org/10.3390/ijgi13030104
Chicago/Turabian StyleGuo, Yuan, Jian Zhou, Xicheng Li, Youchen Tang, and Zhicheng Lv. 2024. "A Review of Crowdsourcing Update Methods for High-Definition Maps" ISPRS International Journal of Geo-Information 13, no. 3: 104. https://doi.org/10.3390/ijgi13030104
APA StyleGuo, Y., Zhou, J., Li, X., Tang, Y., & Lv, Z. (2024). A Review of Crowdsourcing Update Methods for High-Definition Maps. ISPRS International Journal of Geo-Information, 13(3), 104. https://doi.org/10.3390/ijgi13030104