
Generating Orthorectified Multi-Perspective 2.5D Maps to Facilitate Web GIS-Based Visualization and Exploitation of Massive 3D City Models

 ,
,
Abstract
:1. Introduction
- Support for various 3D model formats. 3D models come in a wide variety of formats, including .3ds, .obj and .dae.
- Support for LOD structure and spatial partitioning. Given limited computational power, a well-designed spatial-partitioning and out-of-core rendering scheme must be employed to generate 2.5D maps at a sufficiently high spatial resolution. By leveraging an LOD structure, a large 3D city model can be rendered into a grid of map tiles, but these map tiles need be accurately georeferenced so they can be stitched back together to form a seamless 2.5D mosaic.
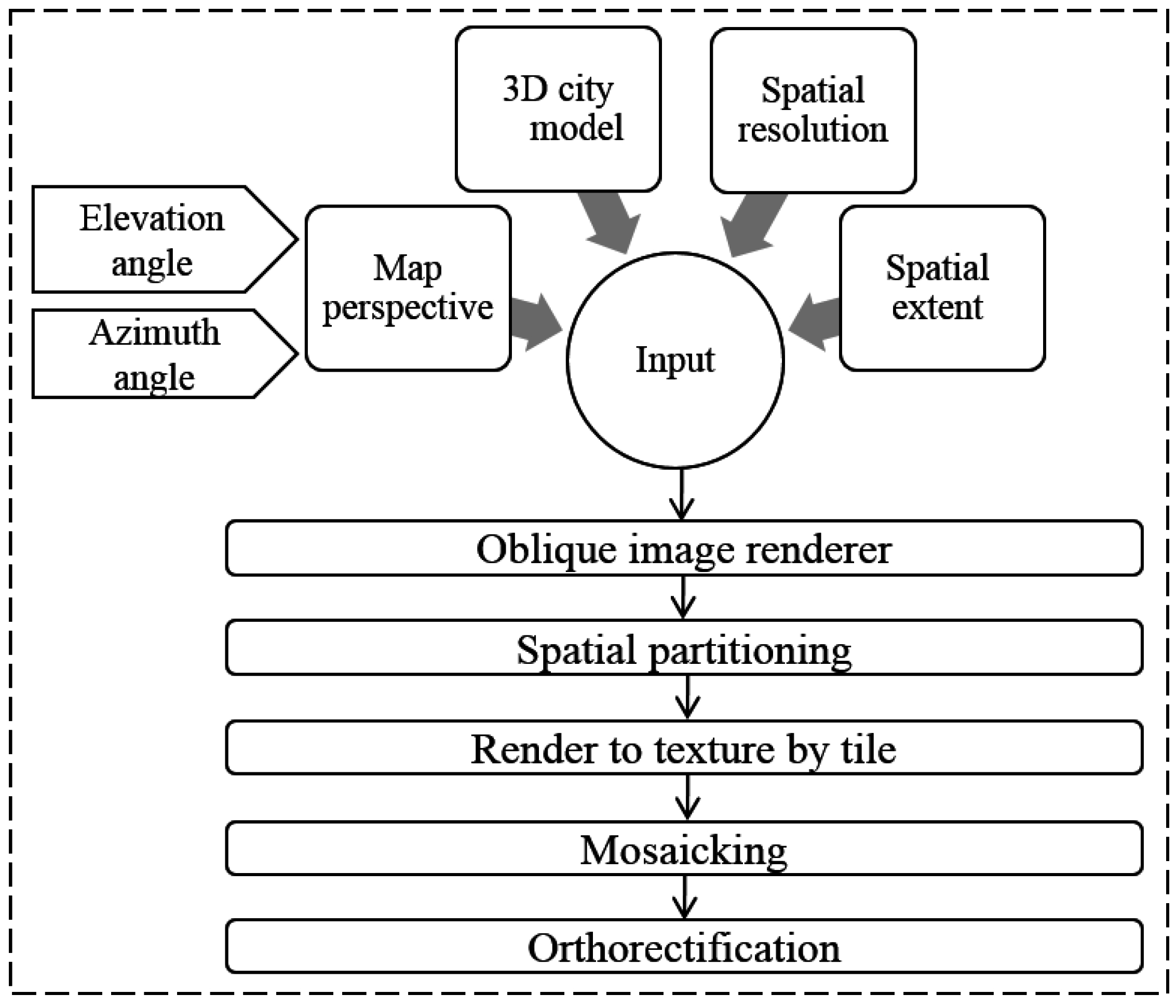
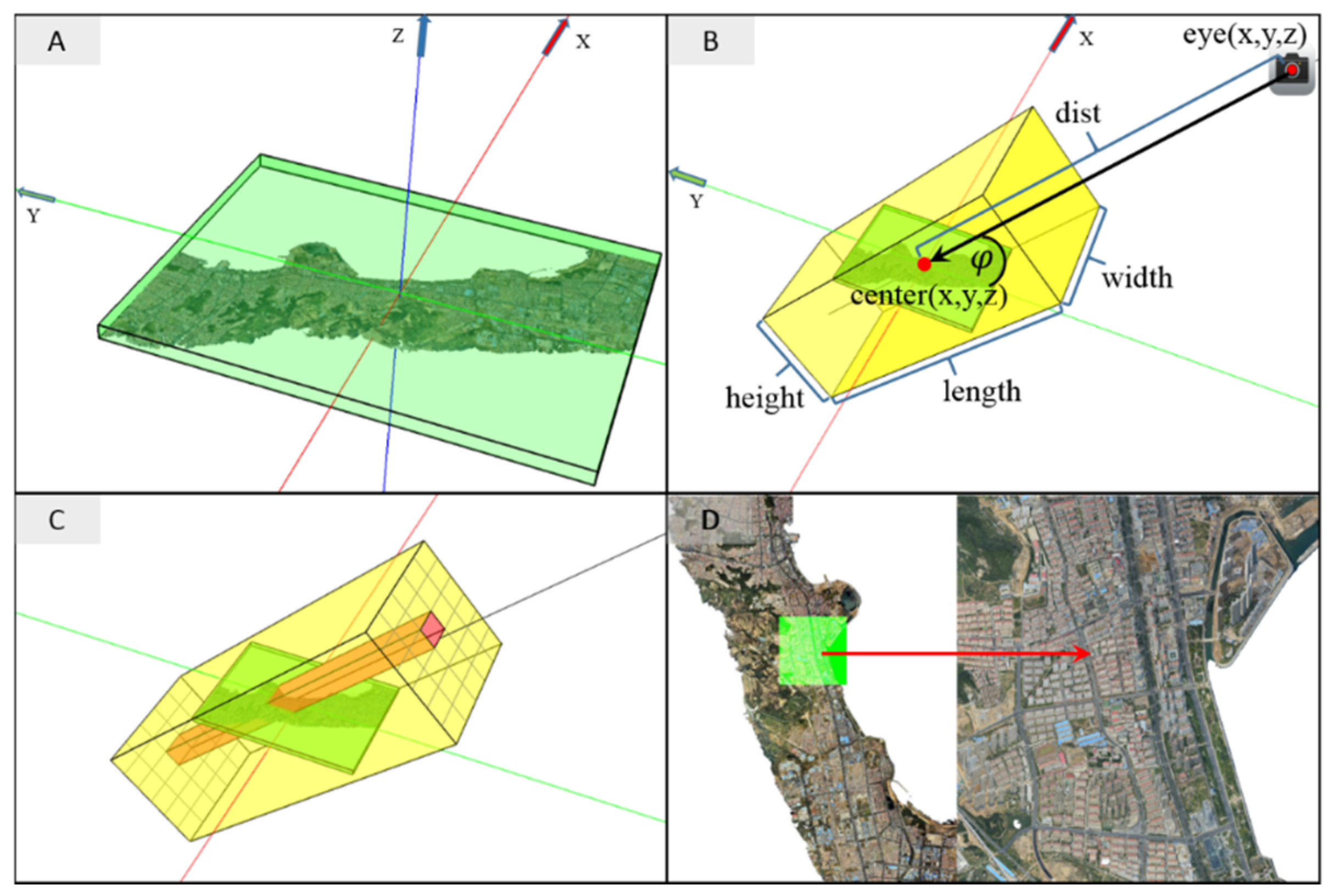
- Support for custom map perspectives. An oblique perspective is defined by a camera’s azimuth and elevation angle. A multi-perspective set of 2.5D maps can potentially afford a complete view of a 3D city model.
- Support for orthorectification. The presence of terrain and the use of an oblique perspective may subject a set of 2.5D maps to distortion and misalignment. Orthorectification brings a multi-perspective set of 2.5D maps back into a common reference system.
2. Methods
2.1. Constructing an Integrated Oblique Image Renderer
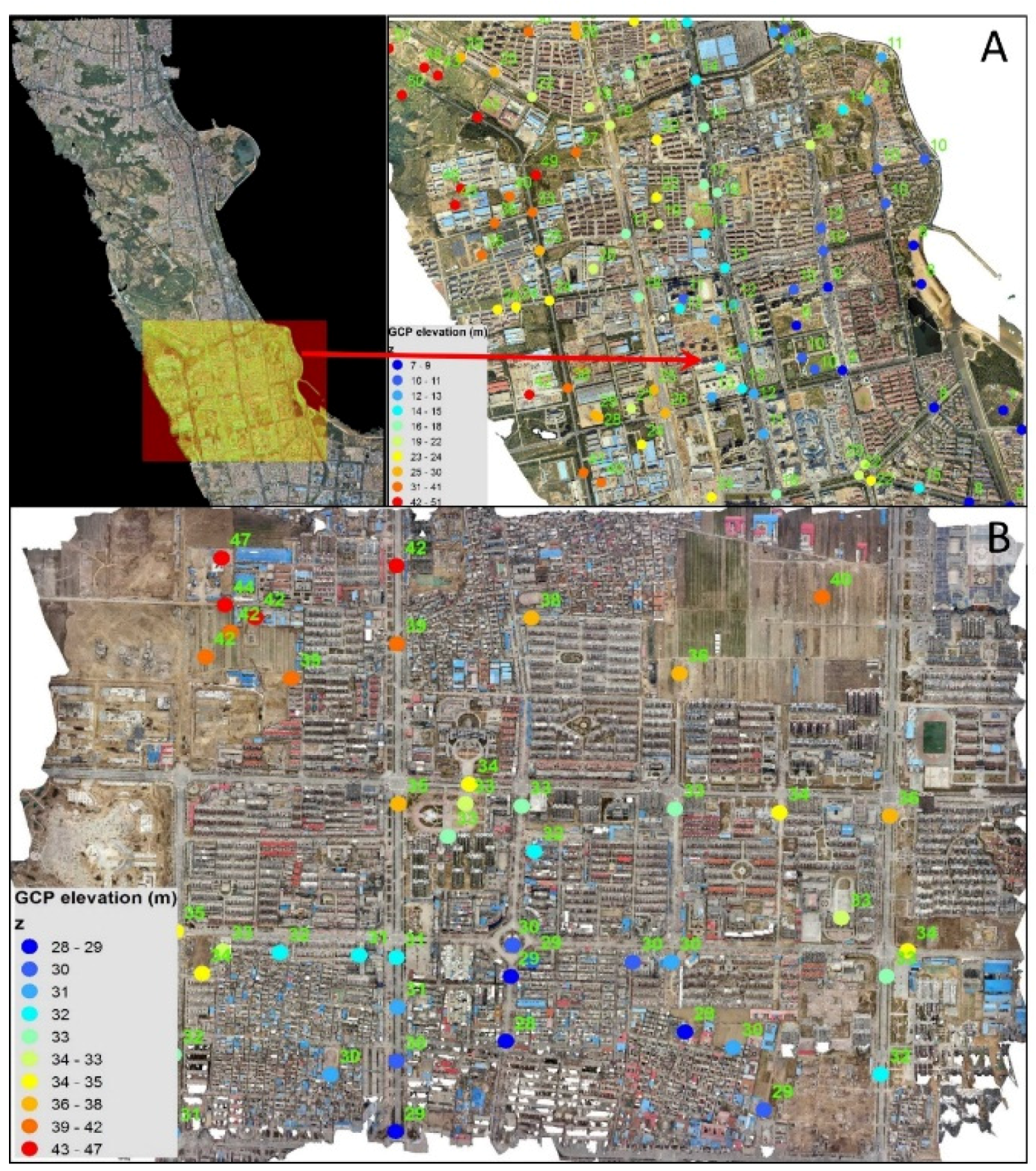
2.2. Automating GCP Coordinates Retrieval for Orthorectification
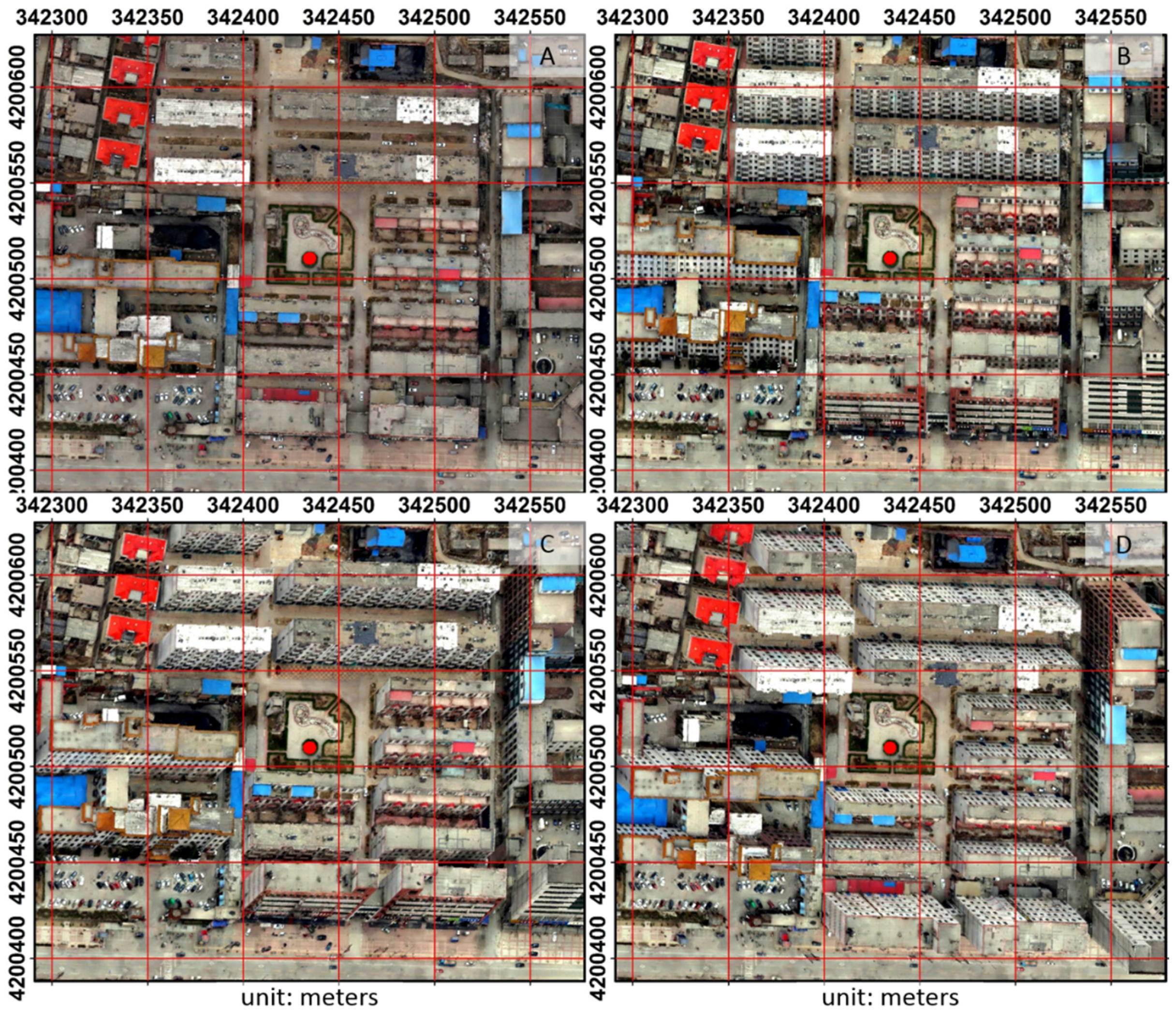
- Locate the row and column number of the map tile that contains the GCP by the orthographic coordinates of this GCP.
- Create an OpenGL point primitive using the GCP coordinates and then render the point together with the 3D city model using the associated orthographic camera. In the GPU shading pipeline, the GCP primitive is shaded in red and the 3D city model in pure black with all textures and materials disabled (Figure 7B). In Figure 6B, the background pixels associated with the 3D city model are not discarded to show how the GCPs are displaced in an oblique view against the orthographic view.
- Traverse the pixels in the RTT after the render loop is completed. The red pixels are retained (Figure 7C) while black ones are discarded. The center of the cluster of red pixels is assumed to be the coordinates of this GCP in the oblique space.
3. Application
3.1. Generating 2.5D Maps from 3D City Models
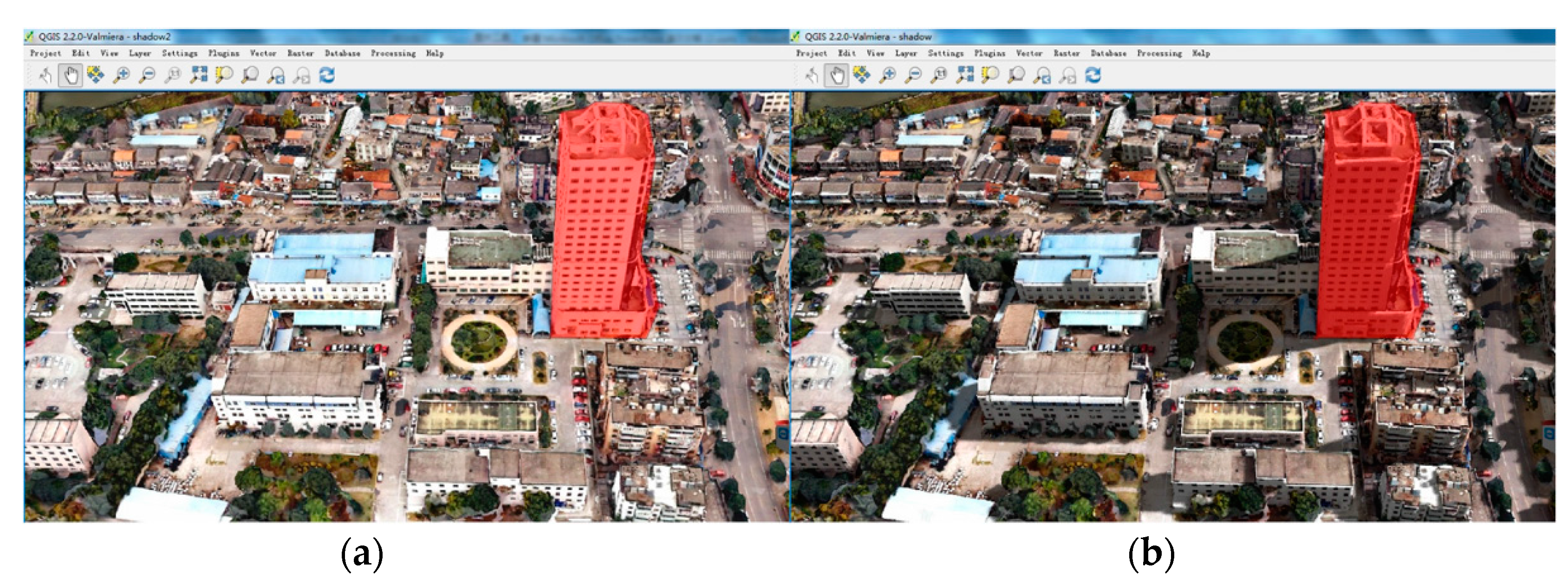
3.2. Comparison of 2.5D and 3D Representations in Web-Based Visualization of 3D City Models
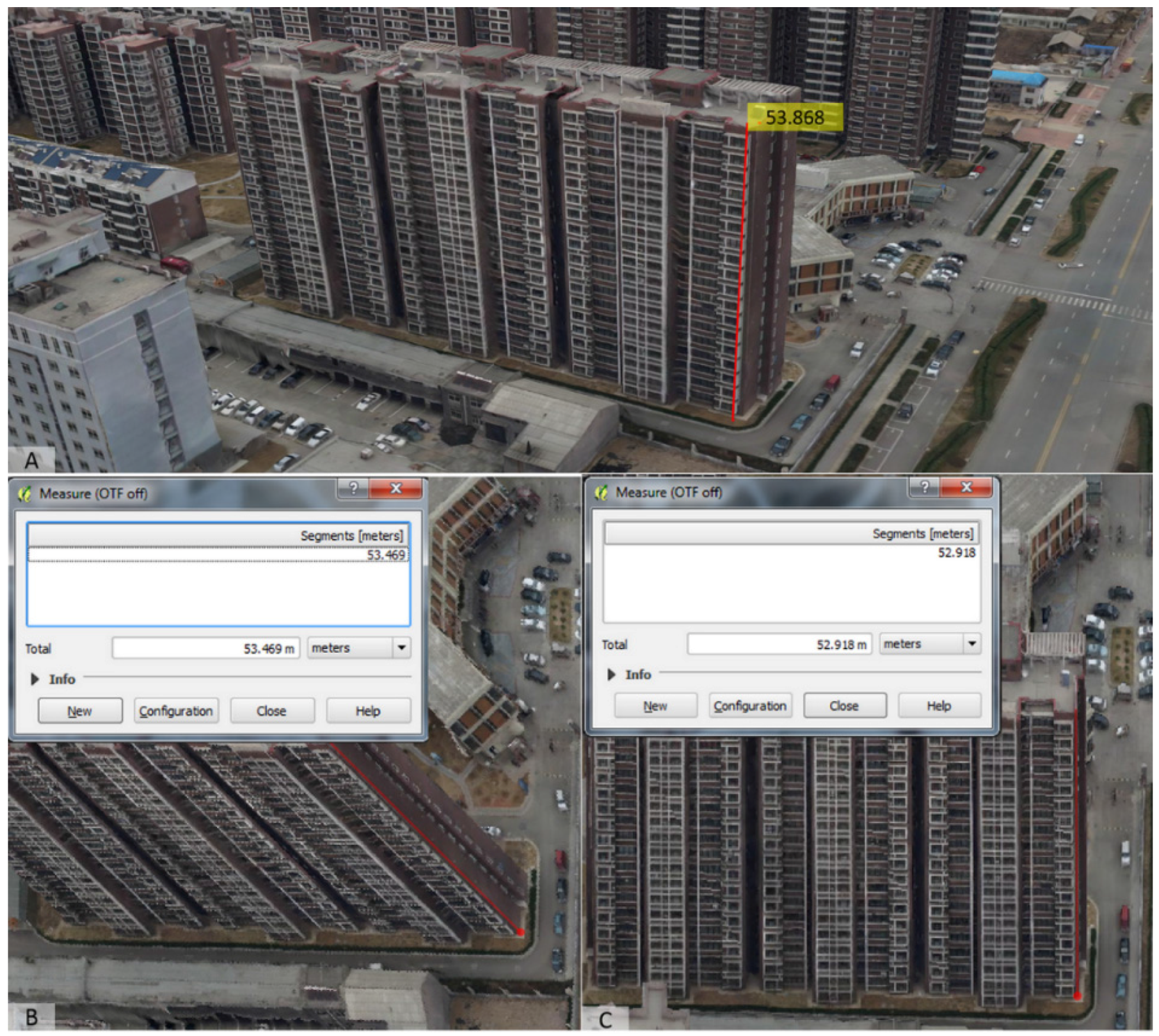
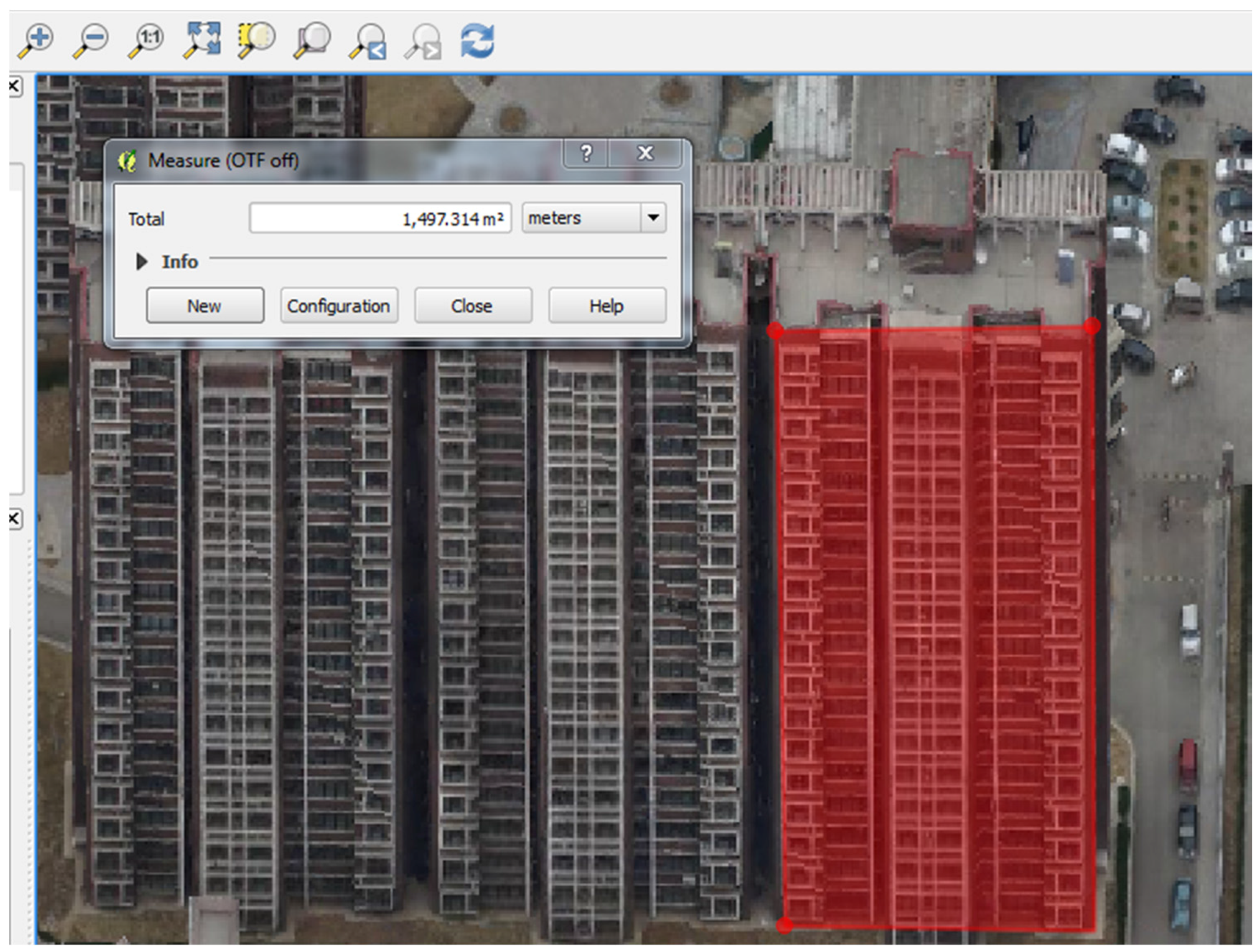
3.3. Geometric Measurement on 2.5D Maps and Accuracy Assessment
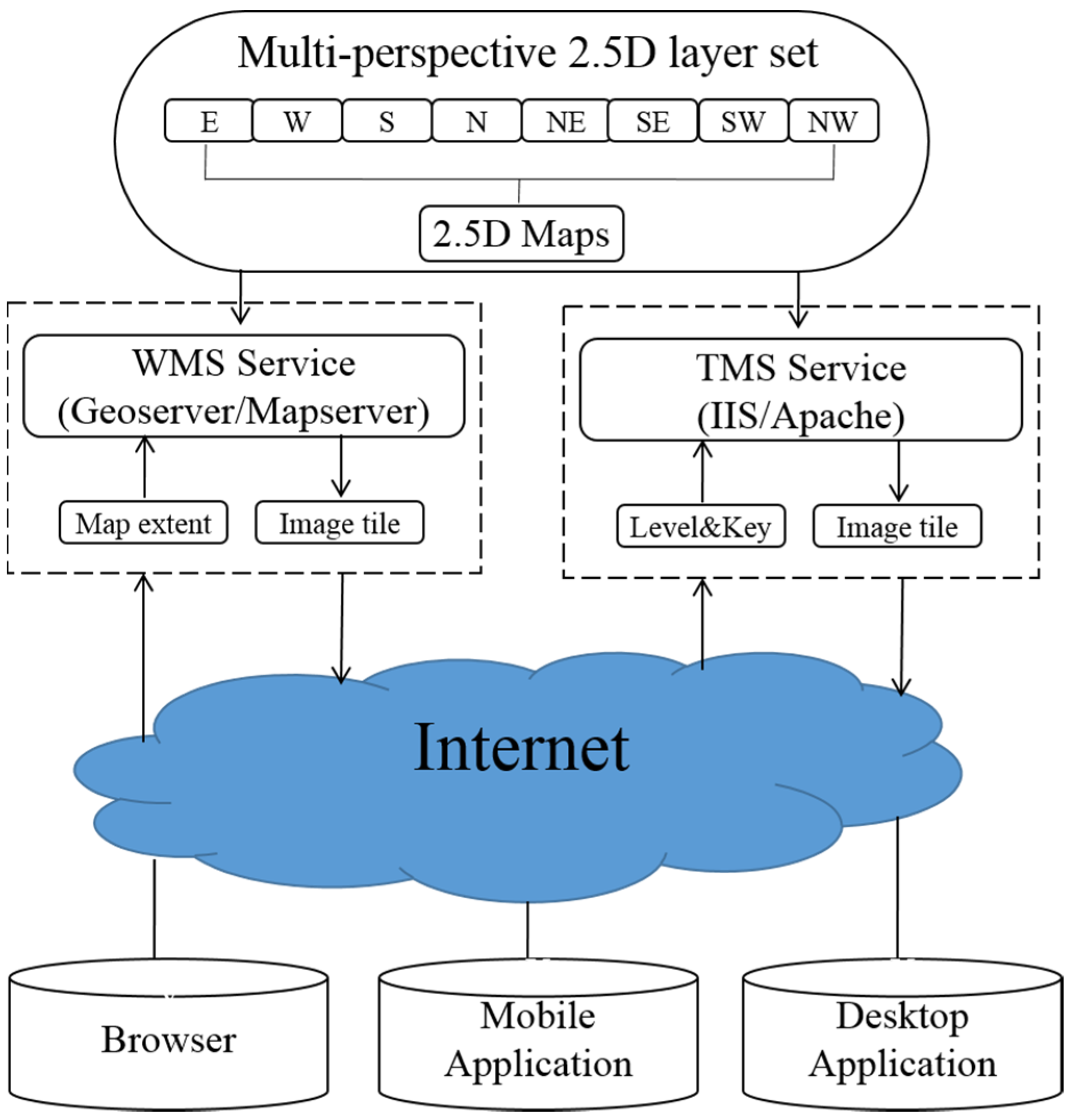
3.4. Workflow for Integrating 2.5D Maps into Web GIS
3.5. Integrating Orthorectified 2.5D Images into a Street Map for Campus Navigation
3.6. The Fusion of Scientific Data and Art in 2.5D Cartography
4. Conclusions
- Interactive analysis. Geometric measurement is typical of interactive analysis in 3D city models. We have shown by example that the geometric measurement of buildings can be effectively conducted on 2.5D maps. The accuracy assessment revealed that measurement of building height on 2.5D maps is subject to minor errors. Although the RMSD is as small as 0.701 m, it must be considered in engineering activities such as cadastral survey. The uncertainty in geometric measurement on 2.5D maps may be related to the inaccurate positioning of a point, inaccurate alignment of lines, or insufficient map resolution.
- Interactive visualization. We conclude that 2.5D maps are a compact data representation optimized for web data streaming and mapping. Our case study showed that a compression ratio of 51:1 was achievable by transforming an OAP3D of 81.5 GB into an eight-perspective set of 2.5D maps of 1.6 GB. Efficient streaming of high-resolution 2.5D maps to a client can ensure a high-quality visualization experience.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bruse, M.; Fleer, H. Simulating surface–plant–air interactions inside urban environments with a three dimensional numerical model. Environ. Model. Softw. 1998, 13, 373–384. [Google Scholar] [CrossRef]
- Huang, B.; Jiang, B.; Li, H. An integration of GIS, virtual reality and the Internet for visualization, analysis and exploration of spatial data. Int. J. Geogr. Inf. Sci. 2001, 15, 439–456. [Google Scholar] [CrossRef]
- Lin, H.; Chen, M.; Lu, G. Virtual geographic environment: A workspace for computer-aided geographic experiments. Ann. Assoc. Am. Geogr. 2013, 103, 465–482. [Google Scholar] [CrossRef]
- Li, W.; Gong, J.; Yu, P.; Duan, Q.; Zou, Y. A stream-based Parasitic Model for implementing Mobile Digital Earth. Int. J. Dig. Earth 2014, 7, 38–52. [Google Scholar] [CrossRef]
- Ledoux, H.; Meijers, M. Topologically consistent 3D city models obtained by extrusion. Int. J. Geogr. Inf. Sci. 2011, 25, 557–574. [Google Scholar] [CrossRef]
- Cheng, L.; Gong, J.; Li, M.; Liu, Y. 3D building model reconstruction from multi-view aerial imagery and lidar data. Photogramm. Eng. Remote Sens. 2011, 77, 125–139. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3d modeling–current status and future perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 22–37. [Google Scholar] [CrossRef]
- Liang, J.; Shen, S.; Gong, J.; Liu, J.; Zhang, J. Embedding user-generated content into oblique airborne photogrammetry-based 3D city model. Int. J. Geogr. Inf. Sci. 2016. [Google Scholar] [CrossRef]
- Ranzinger, M.; Gleixner, G. GIS datasets for 3D urban planning. Comput. Environ. Urban Syst. 1997, 21, 159–173. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Q.; Wang, J. 3D city models based spatial analysis to urban design. Geogr. Inf. Sci. 2004, 10, 82–86. [Google Scholar] [CrossRef]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef]
- Biljecki, F.; Heuvelink, G.B.; Ledoux, H.; Stoter, J. Propagation of positional error in 3D GIS: Estimation of the solar irradiation of building roofs. Int. J. Geogr. Inf. Sci. 2015, 29, 2269–2294. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Li, W.; Ibrahim, A.N. A visualization-oriented 3D method for efficient computation of urban solar radiation based on 3D–2D surface mapping. Int. J. Geogr. Inf. Sci. 2014, 28, 780–798. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Zhou, J.; Ibrahim, A.N.; Li, M. An open-source 3D solar radiation model integrated with a 3D Geographic Information System. Environ. Model. Softw. 2015, 64, 94–101. [Google Scholar] [CrossRef]
- Lukač, N.; Žalik, B. GPU-based roofs’ solar potential estimation using LiDAR data. Comput. Geosci. 2013, 52, 34–41. [Google Scholar] [CrossRef]
- Carrión, D.; Lorenz, A.; Kolbe, T.H. Estimation of the energetic rehabilitation state of buildings for the city of Berlin using a 3D city model represented in CityGML. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 31–35. [Google Scholar]
- Saran, S.; Wate, P.; Srivastav, S.K.; Krishna Murthy, Y.V.N. CityGML at semantic level for urban energy conservation strategies. Ann. GIS. 2015, 21, 27–41. [Google Scholar] [CrossRef]
- Boeters, R.; Arroyo Ohori, K.; Biljecki, F.; Zlatanova, S. Automatically enhancing CityGML LOD2 models with a corresponding indoor geometry. Int. J. Geogr. Inf. Sci. 2015, 29, 2248–2268. [Google Scholar] [CrossRef]
- Shiravi, S.; Zhong, M.; Beykaei, S.A.; Hunt, J.D.; Abraham, J.E. An assessment of the utility of LiDAR data in extracting base-year floorspace and a comparison with the census-based approach. Environ. Plan. B Plan. Des. 2015, 42, 708–729. [Google Scholar]
- Henn, A.; Römer, C.; Gröger, G.; Plümer, L. Automatic classification of building types in 3D city models. GeoInformatica 2012, 16, 281–306. [Google Scholar] [CrossRef]
- Royan, J.; Gioia, P.; Cavagna, R.; Bouville, C. Network-based visualization of 3d landscapes and city models. IEEE Comput. Graph. Appl. 2007, 27, 70–79. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.P.J.; Putra, S.Y.; Li, W. Viewsphere: A GIS-based 3D visibility analysis for urban design evaluation. Environ. Plan. B Plan. Des. 2007, 34, 971–992. [Google Scholar] [CrossRef]
- Hofierka, J.; Zlocha, M. A new 3-D solar radiation model for 3-D city models. Trans. GIS. 2012, 16, 681–690. [Google Scholar] [CrossRef]
- Guo, R.; Li, L.; Ying, S.; Luo, P.; He, B.; Jiang, R. Developing a 3D cadastre for the administration of urban land use: A case study of Shenzhen, China. Comput. Environ. Urban Syst. 2013, 40, 46–55. [Google Scholar] [CrossRef]
- Duan, Q.; Gong, J.; Li, W.; Shen, S.; Li, R. Improved Cubemap model for 3D navigation in geo-virtual reality. Int. J. Dig. Earth. 2015, 8, 877–900. [Google Scholar] [CrossRef]
- Wu, H.; He, Z.; Gong, J. A virtual globe-based 3D visualization and interactive framework for public participation in urban planning processes. Comput. Environ. Urban Syst. 2010, 34, 291–298. [Google Scholar] [CrossRef]
- Hijazi, I.H.; Ehlers, M.; Zlatanova, S. NIBU: A new approach to representing and analysing interior utility networks within 3D geo-information systems. Int. J. Dig. Earth. 2012, 5, 22–42. [Google Scholar] [CrossRef]
- Kwan, M.P.; Lee, J. Emergency response after 9/11: The potential of real-time 3D GIS for quick emergency response in micro-spatial environments. Comput. Environ. Urban Syst. 2005, 29, 93–113. [Google Scholar] [CrossRef]
- Lu, Z.; Im, J.; Quackenbush, L. A volumetric approach to population estimation using LiDAR remote sensing. Photogramm. Eng. Remote Sens. 2011, 77, 1145–1156. [Google Scholar] [CrossRef]
- Hildebrandt, D.; Timm, R. An assisting, constrained 3D navigation technique for multiscale virtual 3D city models. GeoInformatica 2014, 18, 537–567. [Google Scholar] [CrossRef]
- Amirebrahimi, S.; Rajabifard, A.; Mendis, P.; Ngo, T. A framework for a microscale flood damage assessment and visualization for a building using BIM–GIS integration. Int. J. Dig. Earth. 2016, 9, 363–386. [Google Scholar] [CrossRef]
- Liu, J.; Gong, J.H.; Liang, J.M.; Li, Y.; Kang, L.C.; Song, L.L.; Shi, S.X. A quantitative method for storm surge vulnerability assessment—A case study of Weihai City. Int. J. Dig. Earth 2016. [Google Scholar] [CrossRef]
- Qin, R. Change detection on LOD 2 building models with very high resolution spaceborne stereo imagery. ISPRS J. Photogramm. Remote Sens. 2014, 96, 179–192. [Google Scholar] [CrossRef]
- Shirley, P.; Ashikhmin, M.; Marschner, S. Fundamentals of Computer Graphics; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Krygier, J.B. Cartography as an art and a science? Cartogr. J. 1995, 32, 3–10. [Google Scholar] [CrossRef]
- Peuquet, D.J. An examination of techniques for reformatting digital cartographic data/Part 1: The raster-to-vector process. Cartogr. Int. J. Geogr. Inf. Geovis. 1981, 18, 34–48. [Google Scholar]
- Peuquet, D.J. An examination of techniques for reformatting digital cartographic data/Part 2: The vector-to-raster process. Cartogr. Int. J. Geogr. Inf. Geovis. 1981, 18, 21–33. [Google Scholar]
- Berry, J.K. Fundamental operations in computer-assisted map analysis. Int. J. Geogr. Inf. Syst. 1987, 1, 119–136. [Google Scholar] [CrossRef]
- Goodchild, M. Twenty years of progress: GIScience in 2010. J. Spat. Inf. Sci. 2015, 1, 3–20. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Li, Y. Realistic rendering for physically based shallow water simulation in Virtual Geographic Environments (VGEs). Ann. GIS 2015, 21, 301–312. [Google Scholar] [CrossRef]
- Liu, P.; Gong, J.; Yu, M. Graphics processing unit-based dynamic volume rendering for typhoons on a virtual globe. Int. J. Dig. Earth. 2015, 8, 431–450. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
| Category | Intended for | Product | Model Format Support |
|---|---|---|---|
| low-level graphics application programming interfaces (API) | providing direct access to GPU rendering pipeline. | OpenGL | no built-in support for any model format. |
| DirectX | built-in support only for its native model format. | ||
| high-level 3D CAD studio | creating 3D models and serving photo-realistic off-line rendering. | Autodesk 3ds Max | native support for various 3D model formats |
| Sketchup | native support for various 3D model formats. | ||
| intermediate-level integrated software development kit (SDK) | accelerating development of integrated 3D applications. | OGRE | built-in support only for its native model format. |
| OpenSceneGraph | support for various 3D model formats and LOD structures. |
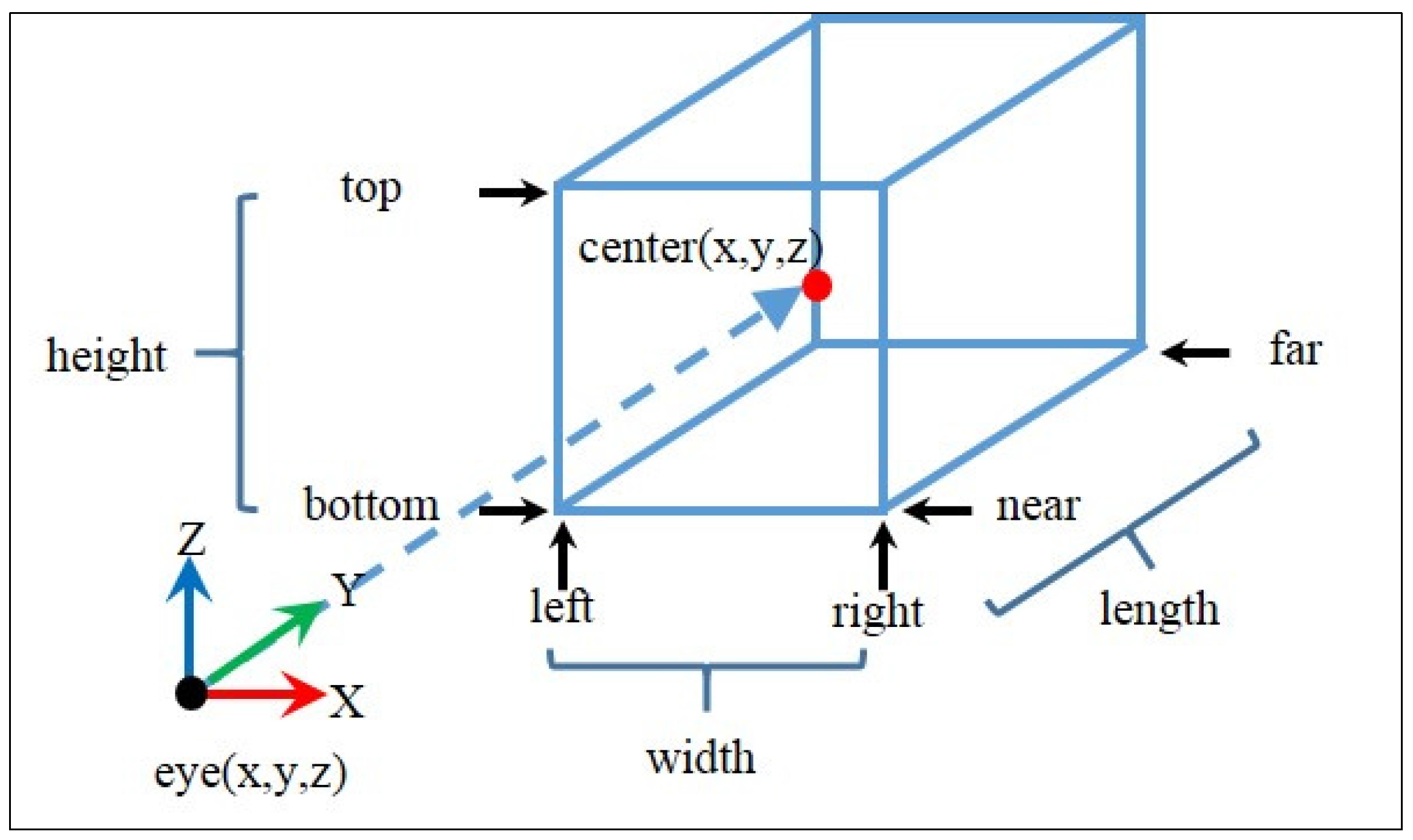
| Variable | Value |
|---|---|
| R | 86.60253906 |
| shadownLen | 100 |
| height | 135.3553391 |
| width | 100 |
| length | 346.4101563 |
| left | −50 |
| right | 50 |
| bottom | –67.67766953 |
| top | 67.67766953 |
| dist | 346.4101563 |
| near | 173.2050781 |
| far | 519.6152344 |
| vForward | { 0, –0.707106781, 0.707106781} |
| vUp | { 0, 0.707106781, 0.707106781} |
| vCenter | { 0, 50, –50} |
| Building ID | 3D Measurement (m) | 2D Measurement (m) | Difference (m) |
|---|---|---|---|
| 1 | 12.507777 | 13.125066 | 0.617289 |
| 2 | 13.713325 | 13.732419 | 0.019094 |
| 3 | 14.129196 | 14.155275 | 0.026079 |
| 4 | 16.866035 | 16.933496 | 0.067461 |
| 5 | 17.225675 | 17.833031 | 0.607356 |
| 6 | 18.953028 | 18.25633 | –0.696698 |
| 7 | 18.758588 | 18.653542 | –0.105046 |
| 8 | 19.039177 | 19.47366 | 0.434483 |
| 9 | 20.484453 | 19.157041 | –1.327412 |
| 10 | 20.829912 | 20.002697 | –0.827215 |
| 11 | 20.874955 | 21.008558 | 0.133603 |
| 12 | 20.955293 | 20.958611 | 0.003318 |
| 13 | 22.353933 | 22.861286 | 0.507353 |
| 14 | 22.754253 | 22.423482 | –0.330771 |
| 15 | 22.520097 | 22.066294 | –0.453803 |
| 16 | 23.235158 | 24.293483 | 1.058325 |
| 17 | 33.576494 | 31.089237 | –2.487257 |
| 18 | 37.405119 | 36.844787 | –0.560332 |
| 19 | 55.114582 | 54.690003 | –0.424579 |
| 20 | 56.291389 | 56.197712 | –0.093677 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Gong, J.; Liu, J.; Zou, Y.; Zhang, J.; Sun, J.; Chen, S. Generating Orthorectified Multi-Perspective 2.5D Maps to Facilitate Web GIS-Based Visualization and Exploitation of Massive 3D City Models. ISPRS Int. J. Geo-Inf. 2016, 5, 212. https://doi.org/10.3390/ijgi5110212
Liang J, Gong J, Liu J, Zou Y, Zhang J, Sun J, Chen S. Generating Orthorectified Multi-Perspective 2.5D Maps to Facilitate Web GIS-Based Visualization and Exploitation of Massive 3D City Models. ISPRS International Journal of Geo-Information. 2016; 5(11):212. https://doi.org/10.3390/ijgi5110212
Chicago/Turabian StyleLiang, Jianming, Jianhua Gong, Jin Liu, Yuling Zou, Jinming Zhang, Jun Sun, and Shuisen Chen. 2016. "Generating Orthorectified Multi-Perspective 2.5D Maps to Facilitate Web GIS-Based Visualization and Exploitation of Massive 3D City Models" ISPRS International Journal of Geo-Information 5, no. 11: 212. https://doi.org/10.3390/ijgi5110212
APA StyleLiang, J., Gong, J., Liu, J., Zou, Y., Zhang, J., Sun, J., & Chen, S. (2016). Generating Orthorectified Multi-Perspective 2.5D Maps to Facilitate Web GIS-Based Visualization and Exploitation of Massive 3D City Models. ISPRS International Journal of Geo-Information, 5(11), 212. https://doi.org/10.3390/ijgi5110212