
Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau



 ,
,
Abstract
:1. Introduction
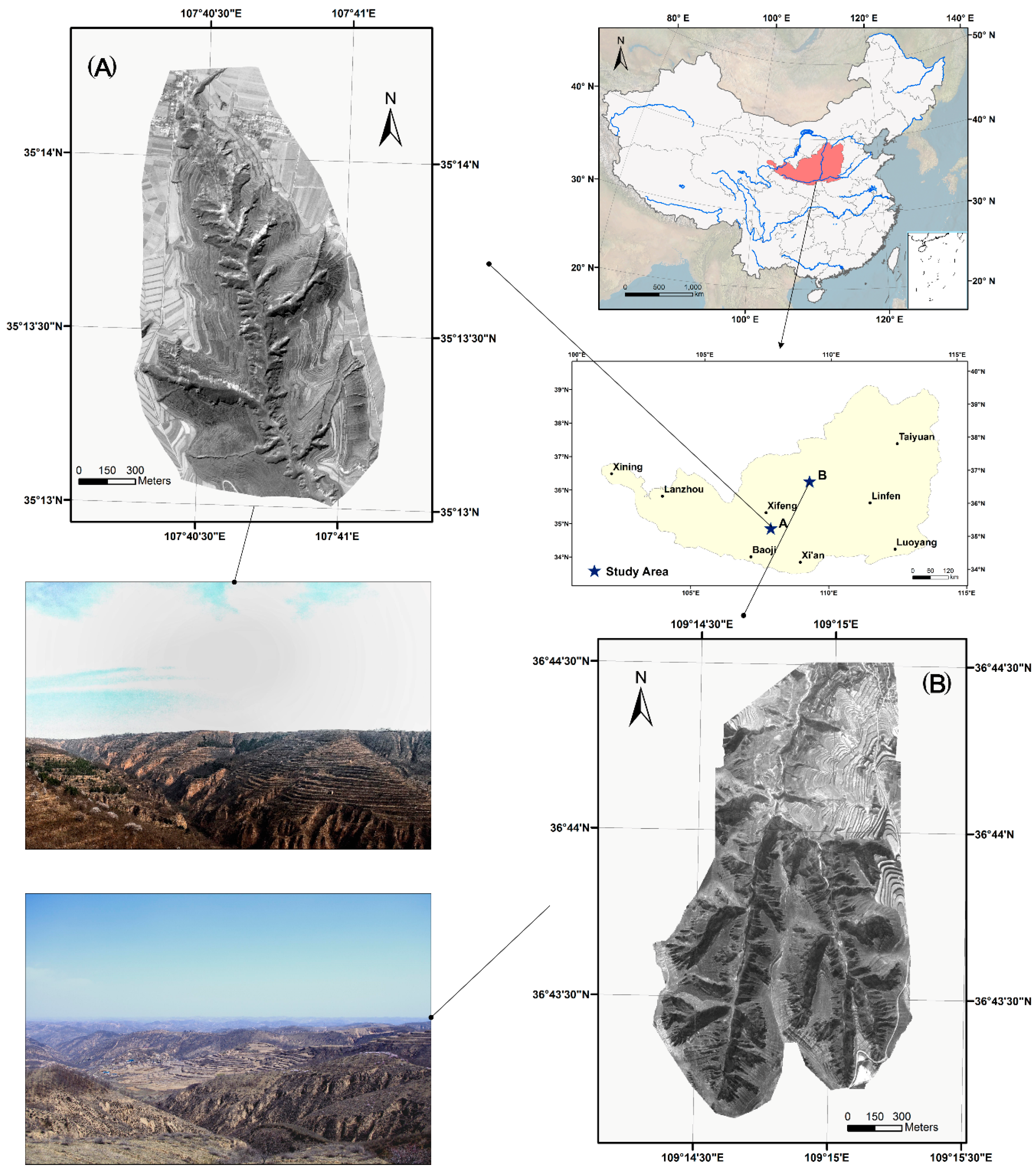
2. Study Area
3. Method
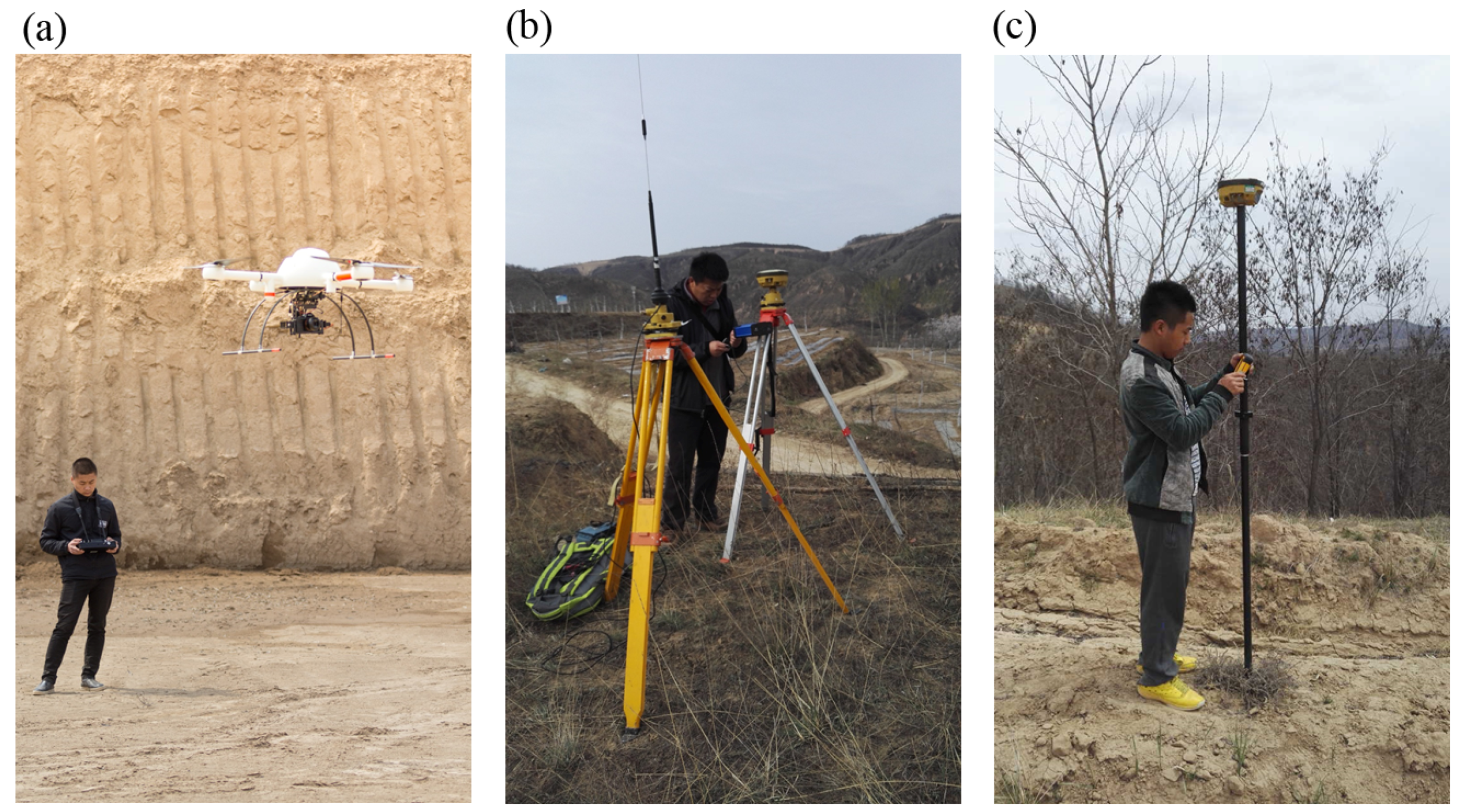
3.1. UAV-Based Data Acquisition
3.1.1. UAV Description
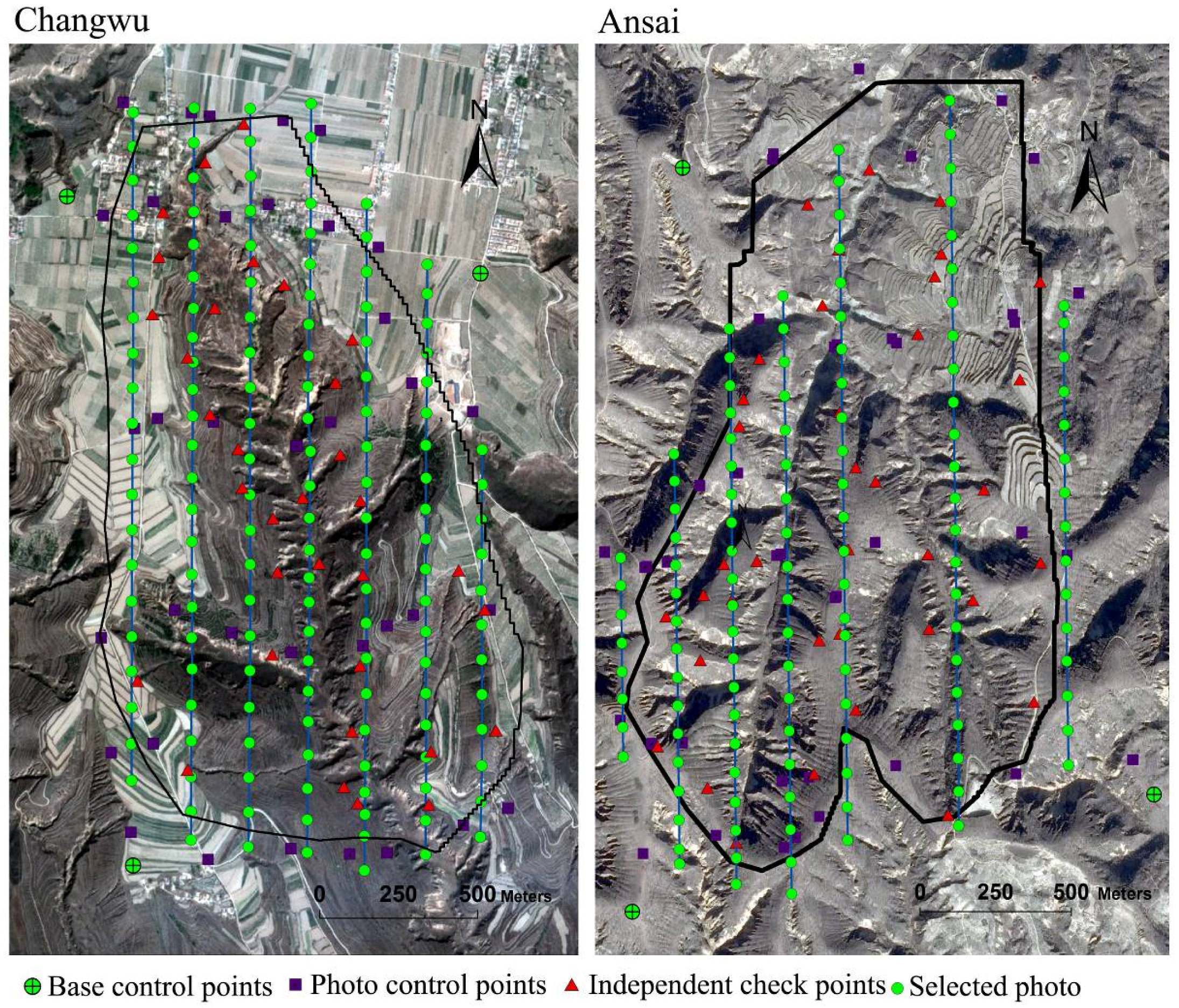
3.1.2. Outdoor Survey
3.1.3. Indoor Image Processing
3.1.4. Accuracy Assessment
3.2. Object-Based Gully-Affected Areas Detection
3.2.1. Data Preparation
3.2.2. Segmentation
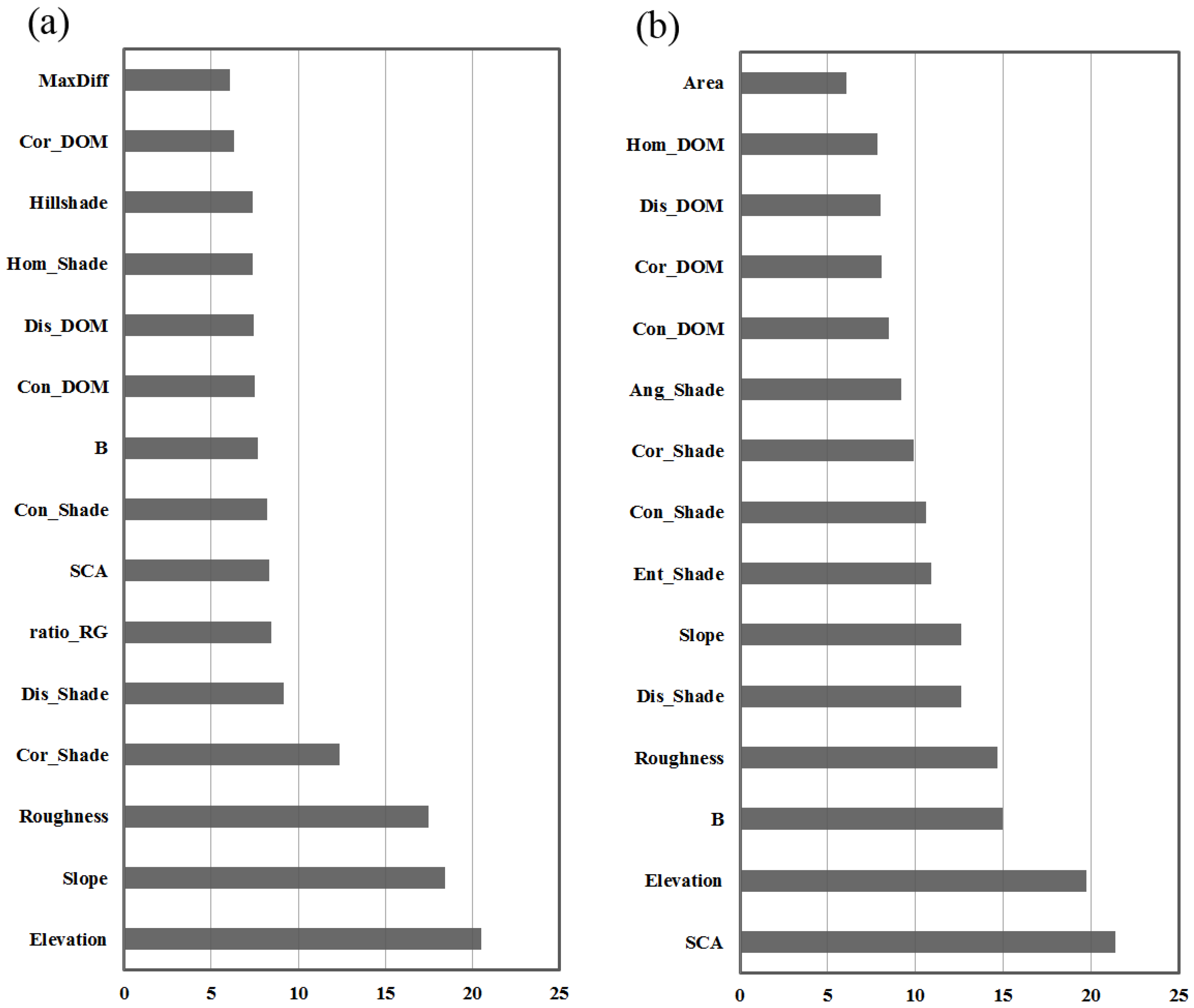
3.2.3. Image Classification: RF
4. Results
4.1. DEM and Ortho-Mosaics Generation
4.2. Detection of Gully-Affected Areas
5. Discussion
5.1. Comparison with Existing Studies
5.2. Limitations for the Application of UAV in Loess Hilly Region
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, B.; Zheng, F.; Römkens, M.J.M.; Darboux, F. Soil erodibility for water erosion: A perspective and Chinese experiences. Geomorphology 2013, 187, 1–10. [Google Scholar] [CrossRef]
- De Vente, J.; Poesen, J. Predicting soil erosion and sediment yield at the basin scale: Scale issues and semi-quantitative models. Earth Sci. Rev. 2005, 71, 95–125. [Google Scholar] [CrossRef]
- Longoni, L.; Papini, M.; Brambilla, D.; Barazzetti, L.; Roncoroni, F.; Scaioni, M.; Ivanov, V.I. Monitoring riverbank erosion in mountain catchments using terrestrial laser scanning. Remote Sens. 2016, 8, 241. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.J.; Zhao, W.W.; Chen, L.D.; Zhang, Q.J.; Lv, Y.H.; Gulinck, H.; Poesen, J. Assessment of soil erosion at large watershed scale using RUSLE and GIS: A case study in the Loess Plateau of China. Land Degrad. Dev. 2005, 16, 73–85. [Google Scholar] [CrossRef]
- Liu, K.; Tang, G.; Jiang, L.; Zhu, A.X.; Yang, J.Y.; Song, X.D. Regional-scale calculation of the LS factor using parallel processing. Comput. Geosci. 2015, 78, 110–122. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Castillo, C.; Gómez, J.A. A century of gully erosion research: Urgency, complexity and study approaches. Earth Sci. Rev. 2016, 160, 300–319. [Google Scholar] [CrossRef]
- Maugnard, A.; Cordonnier, H.; Degre, A.; Demarcin, P.; Pineux, N.; Bielders, C.L. Uncertainty assessment of ephemeral gully identification, characteristics and topographic threshold when using aerial photographs in agricultural settings. Earth Surf. Process. Landf. 2014, 39, 1319–1330. [Google Scholar] [CrossRef]
- Jurchescu, M.; Grecu, F. Modelling the occurrence of gullies at two spatial scales in the Olteţ Drainage Basin (Romania). Nat. Hazards 2015, 79, 255–289. [Google Scholar] [CrossRef]
- Zhang, S.W.; Li, F.; Li, T.Q.; Yang, J.C.; Bu, K.; Chang, L.P.; Wang, W.J.; Yan, Y.C. Remote sensing monitoring of gullies on a regional scale: A case study of Kebai region in Heilongjiang Province, China. Chin. Geogr. Sci. 2015, 25, 602–611. [Google Scholar] [CrossRef]
- Casalí, J.; López, J.J.; Giráldez, J.V. Ephemeral gully erosion in southern Navarra (Spain). Catena 1999, 36, 65–84. [Google Scholar] [CrossRef]
- Casalí, J.; Loizu, J.; Campo, M.A.; De Santisteban, L.M. Accuracy of methods for field assessment of rill and ephemeral gully erosion. Catena 2006, 67, 128–138. [Google Scholar] [CrossRef]
- Kociuba, W.; Janicki, G.; Rodzik, J.; Stępniewski, K. Comparison of volumetric and remote sensing methods (TLS) for assessing the development of a permanent forested loess gully. Nat. Hazards 2015, 79, 139–158. [Google Scholar] [CrossRef]
- Kenner, R.; Bühler, Y.; Delaloye, R.; Ginzler, C.; Phillips, M. Monitoring of high alpine mass movements combining laser scanning with digital airborne photogrammetry. Geomorphology 2014, 206, 492–504. [Google Scholar] [CrossRef]
- Giménez, R.; Marzolff, I.; Campo, M.A.; Seeger, M.; Ries, J.B.; Casalí, J.; Álvarez-Mozos, J. Accuracy of high-resolution photogrammetric measurements of gullies with contrasting morphology. Earth Surf. Process. Landf. 2009, 34, 1915–1926. [Google Scholar] [CrossRef]
- Castillo, C.; Pérez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gómez, J.A. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef] [Green Version]
- Hohenthal, J.; Alho, P.; Hyyppä, J.; Hyyppä, H. Laser scanning applications in fluvial studies. Prog. Phys. Geogr. 2011, 35, 782–809. [Google Scholar] [CrossRef]
- Bremer, M.; Sass, O. Combining airborne and terrestrial laser scanning for quantifying erosion and deposition by a debris flow event. Geomorphology 2012, 138, 49–60. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.; Stiller, I.; Muir, J. Assessing the repeatability of terrestrial laser scanning for monitoring gully topography: A case study from Aratula, Queensland, Australia. Geomorphology 2016, 262, 24–36. [Google Scholar] [CrossRef]
- Heritage, G.L.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surf. Process. Landf. 2007, 32, 66–74. [Google Scholar] [CrossRef]
- Höfle, B.; Griesbaum, L.; Forbriger, M. GIS-based detection of gullies in terrestrial LiDAR Data of the Cerro Llamoca Peatland (Peru). Remote Sens. 2013, 5, 5851–5870. [Google Scholar] [CrossRef]
- Vrieling, A. Satellite remote sensing for water erosion assessment: A review. Catena 2006, 65, 2–18. [Google Scholar] [CrossRef]
- Li, D.; Ke, Y.; Gong, H.; Li, X. Object-based urban tree species classification using Bi-Temporal WorldView-2 and WorldView-3 images. Remote Sens. 2015, 7, 16917–16937. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Ulrich, P. Surface reconstruction and landslide displacement measurements with Pléiades satellite images. ISPRS J. Photogramm. 2014, 95, 1–12. [Google Scholar] [CrossRef]
- Chen, J.; Dowman, I.; Li, S.; Li, Z.L.; Madden, M.; Mills, J.; Paparoditis, N.; Rottensteiner, F.; Sester, M.; Toth, C.; et al. Information from imagery: ISPRS scientific vision and research agenda. ISPRS J. Photogramm. 2016, 115, 3–21. [Google Scholar] [CrossRef]
- Wang, R.H.; Zhang, S.W.; Yang, J.C.; Pu, L.M.; Yang, C.B.; Yu, L.X.; Chang, L.P.; Bu, K. Integrated use of GCM, RS, and GIS for the assessment of hillslope and gully erosion in the Mushi River Sub-Catchment, Northeast China. Sustainability 2016, 8, 317. [Google Scholar] [CrossRef]
- Wang, R.H.; Zhang, S.W.; Pu, L.M.; Yang, J.C.; Yang, C.B.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B.L.; et al. Gully erosion mapping and monitoring at multiple scales based on multi-source remote sensing data of the Sancha River Catchment, Northeast China. ISPRS Int. J. Geo-Inf. 2016, 5, 200. [Google Scholar] [CrossRef]
- Kornus, W.; Alamús, R.; Ruiz, A.; Talaya, J. DEM generation from SPOT-5 3-fold along track stereoscopic imagery using autocalibration. ISPRS J. Photogramm. 2006, 60, 147–159. [Google Scholar] [CrossRef]
- Maerker, M.; Quénéhervé, G.; Bachofer, F.; Mori, S. A simple DEM assessment procedure for gully system analysis in the Lake Manyara area, northern Tanzania. Nat. Hazards 2015, 79, 235–253. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned Aerial Vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.G.; Faust, D. Multi-temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Lanf. 2015, 40, 741–755. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Fadul, H.M.; Salih, A.A.; Ali, I.A.; Inanaga, S. Use of remote sensing to map gully erosion along the Atbara River, Sudan. Int. J. Appl. Earth Obs. Geoinf. 1999, 1, 175–180. [Google Scholar] [CrossRef]
- McInnes, J.; Vigiak, O.; Roberts, A.M. Using Google Earth to map gully extent in the West Gippsland region (Victoria, Australia). Int. Congr. Model. Simul. 2011, 49, 3370–3376. [Google Scholar]
- Metternicht, G.I.; Zinck, J.A. Evaluating the information content of JERS-1 SAR and Landsat TM data for discrimination of soil erosion features. ISPRS J. Photogramm. 1998, 53, 143–153. [Google Scholar] [CrossRef]
- Vrieling, A.; Rodrigues, S.C.; Bartholomeus, H.; Sterk, G. Automatic identification of erosion gullies with ASTER imagery in the Brazilian Cerrados. Int. J. Remote Sens. 2007, 28, 2723–2738. [Google Scholar] [CrossRef]
- Karami, A.; Khoorani, A.; Nuhegar, A.; Shamsi, S.R.F.; Moosavi, V. Gully erosion mapping using object-based and pixel-based image classification methods. Environ. Eng. Geosci. 2015, 21, 101–110. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2015, 128, 262–277. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology 2011, 134, 260–268. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Stein, A. Object-based gully system prediction from medium resolution imagery using Random Forests. Geomorphology 2014, 216, 283–294. [Google Scholar] [CrossRef]
- Wang, T.; He, F.; Zhang, A.; Gu, L.; Wen, Y.; Jiang, W.; Shao, H. A quantitative study of gully erosion based on object-oriented analysis techniques: A case study in Beiyanzikou catchment of Qixia, Shandong, China. Sci. World J. 2014, 149–168. [Google Scholar] [CrossRef] [PubMed]
- Tang, G.A.; Li, F.Y.; Liu, X.J.; Long, Y.; Yang, X. Research on the slope spectrum of the Loess Plateau. Sci. China Ser. E 2008, 51, 175–185. [Google Scholar] [CrossRef]
- Zhu, Y.; Cai, Q. Rill Erosion Processes and Its Factors in Different soils. In Gully Erosion under Global Change; Li, Y., Poesen, J., Valentin, C., Eds.; Sichuan Science and Technology Press: Chengdu, China, 2004; pp. 96–108. [Google Scholar]
- Zhu, T.X. Gully and tunnel erosion in the hilly Loess Plateau region, China. Geomorphology 2012, 153, 144–155. [Google Scholar] [CrossRef]
- Zhou, Y.; Tang, G.; Yang, X.; Xiao, C.C.; Zhang, Y.; Luo, M.L. Positive and negative terrains on northern Shaanxi Loess Plateau. J. Geogr. Sci. 2010, 20, 64–76. [Google Scholar] [CrossRef]
- Wu, Y.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- Jiang, S.; Tang, G.; Liu, K. A new extraction method of loess shoulder-line based on marr-hildreth operator and terrain mask. PLoS ONE 2015, 10, e0123804. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhang, Y.; Zhu, Q.; He, Y.; Yao, W. Assessment of bank gully development and vegetation coverage on the Chinese Loess Plateau. Geomorphology 2015, 228, 462–469. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Zhu, Q.; Yang, S.; Li, H.; Ma, H. A gully erosion assessment model for the Chinese Loess Plateau based on changes in gully length and area. Catena 2016. [Google Scholar] [CrossRef]
- Feng, X.; Fu, B.; Lu, N.; Zeng, Y.; Wu, B. How ecological restoration alters ecosystem services: An analysis of carbon sequestration in China’s Loess Plateau. Sci. Rep. 2013, 3, 2846. [Google Scholar] [CrossRef] [PubMed]
- Zheng, F.; Wang, B. Soil erosion in the Loess Plateau region of China. In Restoration and Development of the Degraded Loess Plateau, China; Tsunekawa, A., Liu, G., Yamanaka, N., Du, S., Eds.; Springer: Nishikanda, Japan, 2014; pp. 77–92. [Google Scholar]
- Torres-Sánchez, J.; López-Granados, F.; de Castro, A.I.; Peña-Barragán, J.M. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef] [PubMed]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–27450. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Chandler, J. Effective application of automated digital photogrammetry for geomorphological research. Earth Surf. Process. Landf. 1999, 24, 51–63. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Demarchi, L.; Bizzi, S.; Piégay, H. Hierarchical object-based mapping of riverscape units and in-stream mesohabitats using LiDAR and VHR imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Tarboton, D.G. A new method for the determination of flow directions and upslope areas in grid digital elevation models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informationsverarbeitung XII; Herbert Wichmann Verlag: Heidelberg, Germany, 2000; pp. 12–23. [Google Scholar]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Segmentation optimization and stratified object-based analysis for semi-automated geomorphological mapping. Remote Sens. Environ. 2011, 115, 2976–2985. [Google Scholar] [CrossRef]
- Drăguţ, L.; Eisank, C. Automated object-based classification of topography from SRTM data. Geomorphology 2012, 141, 21–33. [Google Scholar] [CrossRef] [PubMed]
- Espindola, G.M.; Camara, G.; Reis, I.A.; Bins, L.S.; Monteiro, A.M. Parameter selection for region-growing image segmentation algorithms using spatial autocorrelation. Int. J. Remote Sens. 2006, 27, 3035–3040. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Strahler, A.H. The factor of scale in remote sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tided, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy assessment measures for object-based image segmentation goodness. Photogramm. Eng. Remote Sens. 2010, 76, 289–299. [Google Scholar] [CrossRef]
- Liu, Y.; Bian, L.; Meng, Y.; Wang, H.; Zhang, S.; Yang, Y.; Shao, X.; Wang, B. Discrepancy measures for selecting optimal combination of parameter values in object-based image analysis. ISPRS J. Photogramm. 2012, 68, 144–156. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and structural approach to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, 291–314. [Google Scholar] [CrossRef]
- Jaud, M.; Grasso, F.; le Dantec, N.; Verney, R.; Delacourt, C.; Ammann, J.; Deloffre, J.; Grandjean, P. Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS Int. J. Geo-inf. 2016, 5, 50. [Google Scholar] [CrossRef]
- García, V.; Mollineda, R.; Sánchez, J.; Alejo, R.; Sotoca, J. When overlapping unexpectedly alters the classimbalance effects. In Pattern Recognition and Image Analysis; Martí, J., Benedí, J., Mendonça, A., Serrat, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 499–506. [Google Scholar]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Song, X.; Tang, G.; Li, F.Y.; Jiang, L.; Zhou, Y.; Qian, K.J. Extraction of loess shoulder-line based on the parallel GVF snake model in the loess hilly area of China. Comput. Geosci. 2013, 52, 11–20. [Google Scholar] [CrossRef]
- Li, M.; Yang, X.; Xiong, L.Y. Point Cloud Oriented Shoulder Line Extraction in Loess Hilly Area. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 279–282. [Google Scholar]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of gully-affected areas by applying Object-Based Image Analysis (OBIA) in the region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef]
- Fiorucci, F.; Ardizzone, F.; Rossi, M.; Torri, D. The use of stereoscopic satellite images to map rills and ephemeral gullies. Remote Sens. 2015, 7, 14151–14178. [Google Scholar] [CrossRef]
- Lin, Y.; Jiang, M.; Yao, Y.; Zhang, L.F.; Lin, J.Y. Use of UAV oblique imaging for the detection of individual trees in residential environments. Urban For. Urban Green. 2015, 14, 404–412. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Segmentation Strategy | Scale | Shape | Compactness |
|---|---|---|---|---|
| Changwu | DOM | [500,600] | [0.3,0.5] | [0.5,0.7] |
| OSRH | [450,550] | [0.3,0.5] | [0.5,0.7] | |
| Ansai | DOM | [300,350] | [0.3,0.5] | [0.5,0.7] |
| OSRH | [300,350] | [0.3,0.5] | [0.5,0.7] |
| Feature Type | Feature Name | Acronym | Number |
|---|---|---|---|
| Spectral information | Mean band Value | Red; Green; Blue | 3 |
| Band Rations (red/blue, blue/green) | Ratio_RB; Ratio_BG | 2 | |
| Mean brightness | B | 1 | |
| Maximum difference index | MaxDiff | 1 | |
| Topographic information | Mean DEM | Elevation | 1 |
| Mean Slope | Slope | 1 | |
| Mean Roughness | Roughness | 1 | |
| Shaded relief | Hillshade | 1 | |
| Mean Specific catchment area | SCA | 1 | |
| Texture information | GLCM Homogeneity | Hom_DOM; Hom_Shade | 2 |
| GLCM Dissimilarity | Dis_DOM; Dis_Shade | 2 | |
| GLCM Entropy | Ent_DOM; Ent_Shade | 2 | |
| GLCM Correlation | Cor_DOM; Cor_Shade | 2 | |
| GLCM Contrast | Con_DOM; Con_Shade | 2 | |
| GLCM Angular Second Moment | Ang_DOM; Ang_Shade | 2 | |
| GLCM Mean | Mean_DOM; Mean_Shade | 2 | |
| GLCM Standard Deviation | StdDev_DOM; StdDev_Shade | 2 | |
| Geometric information | Shape index | SI | 1 |
| Length-width | LW | 1 | |
| Roundness | Roundness | 1 | |
| Asymmetry | Asymmetry | 1 | |
| Compactness | Compactness | 1 | |
| Area | Area | 1 | |
| Length | Length | 1 | |
| Rectangular Fit | RF | 1 |
| Error type | Study Area | Max | Min | Average | Std. Dev. | RMSE |
|---|---|---|---|---|---|---|
| Horizontal error | Changwu | 0.314 | −0.136 | −0.05 | 0.084 | 0.083 |
| Ansai | 0.355 | −0.355 | 0.12 | 0.079 | 0.143 | |
| Vertical error | Changwu | 0.376 | −0.801 | −0.021 | 0.247 | 0.245 |
| Ansai | 0.684 | −0.904 | −0.03 | 0.341 | 0.339 |
| Scale | Shape | Cpt | OS | US | ED | Num |
|---|---|---|---|---|---|---|
| 515 | 0.5 | 0.5 | 0.122 | 0.108 | 0.115 | 576 |
| 512 | 0.5 | 0.6 | 0.135 | 0.096 | 0.117 | 573 |
| 520 | 0.5 | 0.7 | 0.115 | 0.120 | 0.117 | 570 |
| 535 | 0.4 | 0.5 | 0.131 | 0.109 | 0.120 | 594 |
| 536 | 0.4 | 0.6 | 0.130 | 0.112 | 0.121 | 608 |
| 538 | 0.4 | 0.7 | 0.116 | 0.121 | 0.119 | 577 |
| 574 | 0.3 | 0.5 | 0.104 | 0.111 | 0.107 | 595 |
| 560 | 0.3 | 0.6 | 0.118 | 0.113 | 0.116 | 594 |
| 564 | 0.3 | 0.7 | 0.098 | 0.108 | 0.103 | 604 |
| Scale | Shape | Cpt | OS | US | ED | Num |
|---|---|---|---|---|---|---|
| 461 | 0.5 | 0.7 | 0.078 | 0.093 | 0.089 | 580 |
| 470 | 0.5 | 0.6 | 0.058 | 0.098 | 0.08 | 558 |
| 482 | 0.5 | 0.5 | 0.067 | 0.106 | 0.088 | 529 |
| 481 | 0.4 | 0.7 | 0.052 | 0.078 | 0.066 | 562 |
| 506 | 0.4 | 0.5 | 0.062 | 0.09 | 0.078 | 544 |
| 506 | 0.4 | 0.6 | 0.071 | 0.082 | 0.077 | 534 |
| 516 | 0.3 | 0.7 | 0.078 | 0.08 | 0.079 | 584 |
| 534 | 0.3 | 0.6 | 0.098 | 0.075 | 0.087 | 563 |
| 546 | 0.3 | 0.5 | 0.097 | 0.08 | 0.089 | 540 |
| Scale | Shape | Cpt | OS | US | ED | Num |
|---|---|---|---|---|---|---|
| 314 | 0.3 | 0.5 | 0.076 | 0.119 | 0.100 | 378 |
| 334 | 0.3 | 0.6 | 0.111 | 0.108 | 0.109 | 357 |
| 327 | 0.3 | 0.7 | 0.100 | 0.111 | 0.106 | 372 |
| 322 | 0.4 | 0.5 | 0.123 | 0.104 | 0.114 | 333 |
| 320 | 0.4 | 0.6 | 0.097 | 0.112 | 0.104 | 363 |
| 318 | 0.4 | 0.7 | 0.138 | 0.118 | 0.129 | 339 |
| 300 | 0.5 | 0.5 | 0.095 | 0.134 | 0.116 | 365 |
| 305 | 0.5 | 0.6 | 0.079 | 0.129 | 0.107 | 356 |
| 307 | 0.5 | 0.7 | 0.131 | 0.096 | 0.115 | 373 |
| Scale | Shape | Cpt | OS | US | ED | Num |
|---|---|---|---|---|---|---|
| 318 | 0.3 | 0.5 | 0.069 | 0.103 | 0.088 | 337 |
| 334 | 0.3 | 0.6 | 0.067 | 0.103 | 0.087 | 320 |
| 327 | 0.3 | 0.7 | 0.061 | 0.091 | 0.077 | 342 |
| 317 | 0.4 | 0.5 | 0.074 | 0.107 | 0.092 | 325 |
| 328 | 0.4 | 0.6 | 0.068 | 0.104 | 0.088 | 328 |
| 318 | 0.4 | 0.7 | 0.074 | 0.092 | 0.083 | 338 |
| 300 | 0.5 | 0.5 | 0.078 | 0.111 | 0.096 | 338 |
| 305 | 0.5 | 0.6 | 0.078 | 0.104 | 0.092 | 348 |
| 307 | 0.5 | 0.7 | 0.079 | 0.100 | 0.090 | 355 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Ding, H.; Tang, G.; Na, J.; Huang, X.; Xue, Z.; Yang, X.; Li, F. Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. ISPRS Int. J. Geo-Inf. 2016, 5, 238. https://doi.org/10.3390/ijgi5120238
Liu K, Ding H, Tang G, Na J, Huang X, Xue Z, Yang X, Li F. Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. ISPRS International Journal of Geo-Information. 2016; 5(12):238. https://doi.org/10.3390/ijgi5120238
Chicago/Turabian StyleLiu, Kai, Hu Ding, Guoan Tang, Jiaming Na, Xiaoli Huang, Zhengguang Xue, Xin Yang, and Fayuan Li. 2016. "Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau" ISPRS International Journal of Geo-Information 5, no. 12: 238. https://doi.org/10.3390/ijgi5120238
APA StyleLiu, K., Ding, H., Tang, G., Na, J., Huang, X., Xue, Z., Yang, X., & Li, F. (2016). Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. ISPRS International Journal of Geo-Information, 5(12), 238. https://doi.org/10.3390/ijgi5120238