1. Introduction
Topography is an important factor explaining most environmental processes on Earth and is studied in many fields of research. Depending on the domain, topography is not conceptualised in the same way. On the one hand, terrain can be seen as a field of elevation; on the other hand, it can be conceptualised in terms of landforms (hills, valleys, …) as objects with their own attributes [
1]. The former would lead to computational methods segmenting the terrain into units for analysis and classification, while in the latter, landforms are seen as discrete objects, more or less complex, which do not necessarily cover the whole terrain.
In geomorphometry, landforms are described through two different approaches [
2]. Specific geomorphometry describes discrete landforms, such as a volcano or a dune, and can be more subjective when considering object definitions. General geomorphometry describes the continuous land surface and so is mostly based on quantitative methods and terrain partitioning in form elements. McMillan and Sharry [
3] provide different definitions of landform. In a broad definition, a landform is “any physical feature of the Earth’s surface having a characteristic, recognisable shape”. A more geometrical definition as a “division of the land surface, at a given scale or spatial resolution, bounded by topographic discontinuities and having (relatively) uniform morphometry” fits with the purpose of general geomorphometry. A semantic definition, such as “a terrain unit created by natural processes in such a way that it may be recognised and described in terms of typical attributes where ever it may occur”, is instead more consistent with specific geomorphometry.
In general geomorphometry, the focus is on the computation of numerical local terrain descriptors (slope, curvature) from raster data (or, less than often, triangulated irregular networks) considering the pixel as the basic measurement unit. In order to analyse phenomena at different geographical scales, image segmentation techniques brought further development and enabled the computation of descriptors at different resolutions and the definition of larger patches corresponding to homogeneous or functional units (for example, homogeneous slopes or watersheds). This has brought a new interest in the semantic definition of terrain units [
4].
Semantic modelling of landforms has been addressed by the geomorphology and the GIS communities in two different ways, the former trying to introduce a more object-oriented approach to terrain classification, leading to object-based image analysis (OBIA), while some GIS scientists defined conceptual models, usually presented as ontologies, which can be transformed into logical models that can be implemented.
Moreover, semantic concepts describing landforms are usually fuzzy because they are qualitative and difficult to conceptualise, although the meaning they express is commonly understood by most people [
1]. People do not perceive landforms as crisp regions of the terrain, but through salient features of a landform, which are typical features easily recognisable by humans [
5]. Therefore, much is left to the user’s interpretation. For example, the portrayal of landforms on a map is specified by contour lines and spot heights, and the recognition is performed by the map reader. The difference between how people perceive landforms and how they can be implemented in a machine is referred to as the qualitative-quantitative divide by [
1]. When describing or recognising landforms in a particular application, a user has specific goals, uses qualitative concepts related to her/his domain of expertise and relies on her/his spatial and cognitive abilities during the recognition and description processes. The challenge to computationally support such a recognition process is to transform these qualitative concepts into quantitative variables that a computer program can effectively process. This challenge is addressed by an emerging discipline called spatial cognitive engineering [
6] in which our research takes place. In order to bridge the above-mentioned gap, we claim that there is a need for a high-level language and computerised tools to help users to specify their application goals and to provide landform descriptions interpretable by a computer. Such descriptions should be automatically interpreted by a dedicated software in order to generate the application that will recognise landforms according to the user’s needs.
Indeed, landform understanding varies with the user’s domains and levels of expertise. Hence, modelling and identifying landforms from a terrain model requires a formal conceptualisation, which may be valid only in a specific context. Conceptual models of landforms rely on the description of these salient features that bear the characteristics of the landforms and can include contextual and thematic properties describing the terrain surface around the saliences. For example, a mountain is characterised by a summit, while a valley is characterised by its thalweg. To implement such concepts in a program, one needs to be able to determine quantitative parameters that correspond to landform attributes characterising the user-recognisable salient features.
Several researchers proposed to apply ontological approaches to define such parameters for different kinds of landforms [
7,
8]. However, these works were carried out separately, each usually studying one type of landform in particular. Since sets of landforms have not been considered yet, spatial relationships between landforms have not been introduced in the definitions. Each model is usually created in a specific context. For example, Yan et al. [
9] provided an ontology to model undersea features. The set of undersea features is organised in a taxonomy providing descriptions at different levels of granularity. The authors separate the representations from the landform definitions that they derive from feature definitions based on texts (so-called “glosses”) provided by the International Hydrographic Organisation’s terminology. However, there are numerous ambiguities in such natural language definitions, and implicit knowledge is not expressed. Moreover, [
10] proposed a framework including a geometric and a semantic level to generate a reliable DTM with the purpose of guaranteeing the quality of the final product, but they did not address the issue of landform identification.
It can be observed that in each situation, the proposed models have been developed to achieve specific goals using specific concepts: the situation varies for each kind of landform and with the expertise of the involved user (e.g., a layman or an expert). This is the reason why we aim at developing a systematic approach and software tools to generate implementable descriptions for landforms that can be customised for different application domains. The first advantage of providing such a generic approach would be to provide precise definitions of landforms (using for example an object-oriented representation) that could be stored in a database and processed by programs. Such computer-processable definitions would greatly enrich the topographic knowledge base. Second, a generic approach would provide a metadata model that can be used to reason about landforms. Currently, analyses are mainly carried out on field models. An object-oriented representation of landforms would make it possible to perform automatic reasoning and querying on landform attributes for information retrieval in online applications [
8].
In this research context, as a contribution to the landform-based representation of terrains, we present in this paper a conceptual approach and framework to transform contextual definitions of landforms into formal class definitions that can be implemented in a GIS. We aim at encompassing more specific approaches as proposed in [
8,
11,
12] into a more general framework. This framework is based on a prototype description of a landform that we propose to use as an ontology design pattern for the definition of specific landforms. We will show how it can be used to translate landform concepts into tractable elements from a DTM.
The paper is organised as follows. In
Section 2, we review existing works on landform identification. In
Section 3, we present our framework, describe the landform prototype and demonstrate its usage using the case of submarine canyons.
Section 4 discusses the application of our framework to other kinds of landforms. The last section presents some concluding remarks and on-going development on the project.
3. The Proposed Transformation Approach
Adopting a spatial cognitive engineering approach our research started with the observation that qualitative landform definitions have several distinctive characteristics: (1) they are usually incomplete; (2) they can be conceptualised in different ways and at different geographical scales; (3) they are contextual and related to a specific domain; (4) and they usually involve some implicit knowledge. Furthermore, as we have said earlier, people do not perceive landforms as crisp regions of the terrain, but identify them through salient features that they recognize. In practice, landform definitions are obtained from terminologies agreed upon within a community.
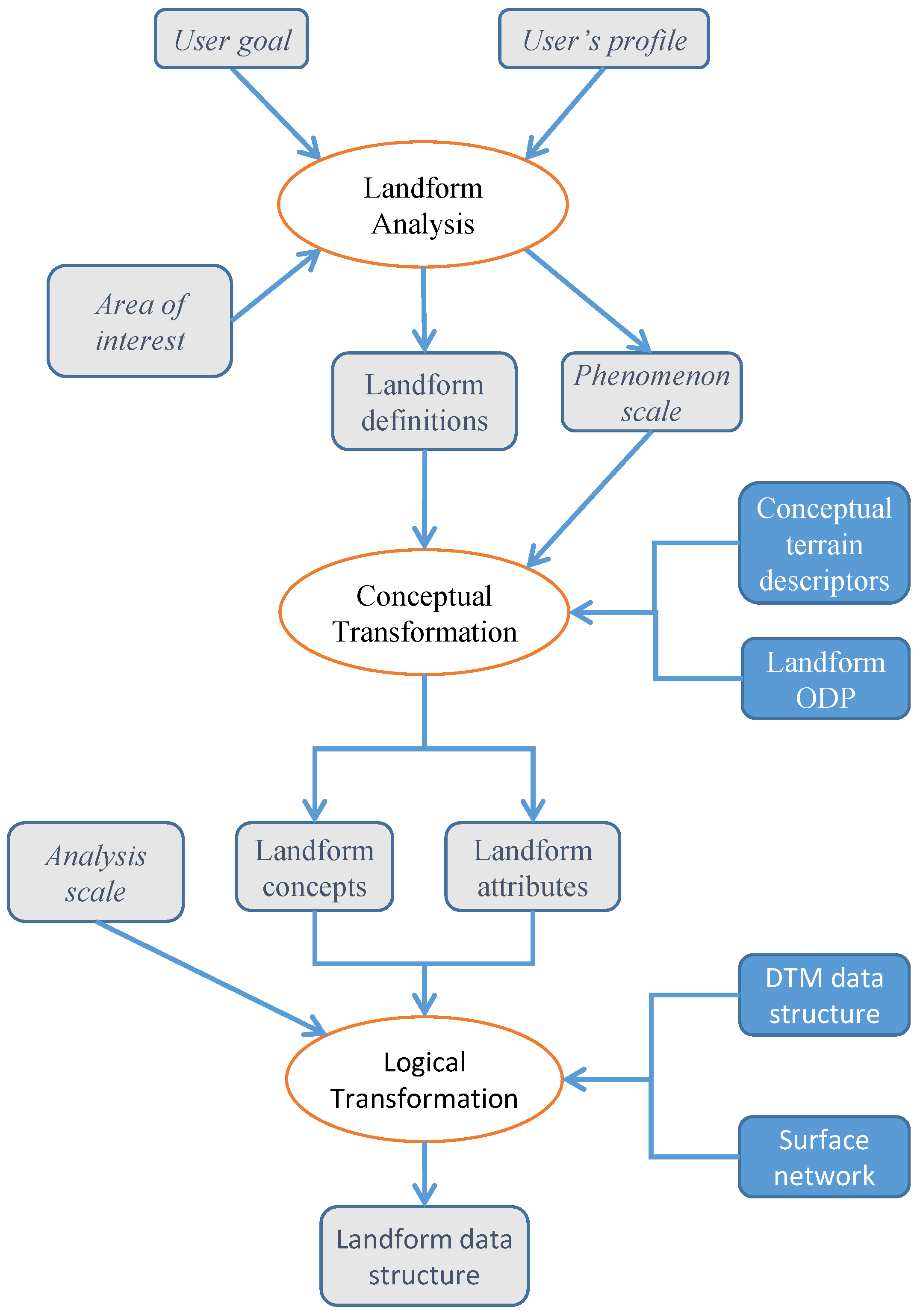
With the aim of developing a systematic approach and software tools to generate implementable descriptions for landforms that can be customized for different application domains, we propose a conceptual framework (a method, a formalism and software tools) to transform contextual definitions of landforms into formal class definitions that can be implemented in a GIS. Our approach relies on the idea that through successive transformations, it is possible to gradually replace the qualitative aspects of the initial user’s definitions by quantitative descriptions that can be implemented in a software application that fulfils the user’s needs. The framework that we propose is based on three main stages that are depicted in
Figure 1 and that we comment on in the following sub-sections: landform analysis, conceptual transformation and logical transformation.
3.1. Landform Analysis
The first step is landform analysis. It consists of collecting knowledge according to the user’s needs and goals. Three fundamental elements are considered: the user’s goal, which specifies the main requirements for the targeted software application and which information it shall yield; the area of interest, which can be specified by the user as a zone delineated by coordinates or simply by a geographical region identified by a name; and the user’s profile, which describes the targeted end-users, including their level of expertise and their domain of expertise.
Since we propose a knowledge engineering approach, we need to mention which actors are involved in it. At this stage, the main actors are users and domain experts. The user provides the details of the three elements mentioned above and does not necessarily have a sharp expertise in the application domain. The expert contributes the domain terminology, which may be composed of textual definitions or even of some informal and implicit knowledge gained from experience. While the textual definitions may vary from one expert to another, these shall correspond to a common understanding shared by experts within a domain and shall be made explicit. The analysis process taking place at this stage of our framework shall identify a set of landforms of interest to the user and specify a phenomenon scale [
31] corresponding to the expected sizes of the landforms to be found.
At the end of the landform analysis stage, landforms shall no longer be described verbally, but formalised through a structured set of nouns and adjectives, which are clearly defined in a dictionary, removing semantic heterogeneity and ambiguity. Existing terminologies, such as Geowordnet [
32], provide a series of formal terms that can be used to identify potential attributes for landform definitions. More precise terms can be added depending on the user’s needs identified by the expert.
As an illustration of the process taking place during the landform analysis stage, let us consider the example of a submarine canyon, which is the case study that is detailed in this paper. The definition of a canyon is general and vague. The International Hydrographic Organisation defines it as “an elongated, narrow, steep-sided depression that generally deepens down-slope” [
33]. During the landform analysis stage, an expert should transform such a textual definition into a more formal and more explicit definitions in which salient elements are identified and described by their characteristic properties. Now, let us see how such a transformation was performed in our case study.
A submarine canyon can be thought of as a kind of a narrow valley with steep sides. As such, it shall be lower than its surroundings and elongated. Its salient element is its thalweg, corresponding to a line running on the canyon floor along the steepest slope. However, a deeper analysis was carried out with the help of geomorphologists [
12] and led to refining of the definition by taking into account the environment where canyons can be found. This analysis emphasised the fact that canyons are usually extensions of rivers that reach the ocean and are channels bringing sediments towards the ocean floor. Hence, they are located on the continental slope, which they cut in a straight line from the continental shelf into the ocean floor. It was shown that this new piece of information was important to define the phenomenon scale (i.e., the expected length of the canyons) in relation to the area of study. For example, the canyons in the St-Lawrence River estuary studied in [
12] are rather short (several kilometres in length) compared to other canyons on the west coast of North America that are several hundred kilometres long. As a consequence, the characteristics of a submarine canyon presented in
Table 2 can be more or less detailed and precise depending on the context of the study.
3.2. The Conceptual Transformation
3.2.1. Landform Composition
The second stage of our framework is the transformation of the landform definitions into a conceptual model. Its purpose is to move from the formal definition obtained at the landform analysis stage towards a structured definition based on a pattern-based definition common to all landforms. As such, this pattern is still independent of any implementation consideration, but shall be based on general concepts that are reusable and extensible.
At the beginning of this stage, landforms are still vague objects with no precise boundaries. Let us recall that they are characterised by a salient element and some geometrical and thematic properties. The salient element is surrounded by a vague region defining the spatial extent of the landform, which also has its own geometrical and thematic properties. In order to be implementable, both the salient element and the surrounding region need to be expressed by geometries that can be extracted from a terrain model. Hence, the qualitative attributes expressed in formal terms must be translated into quantitative variables that can be evaluated from the available data. For example, the term “narrow” associated with canyons is translated into a narrowness variable, and this variable is measured by comparing the canyon width with some threshold value. Such a quantification corresponds to an admissible interpretation of the attributes and depends on the context in which it takes place: the threshold value will be different if we need to characterise canyons of the west coast and canyons of the east coast of North America. The quantification process, that is the process of assigning a quantitative value to characterise an attribute, is referred to as a precisification [
34], as it is viewed as a way to remove vagueness and provide a precise definition to the attribute.
According to [
35], the vagueness of a landform or of a region in general is only conceptual, and its location varies with a chosen precisification. A point can be classified as being definitely inside a region, definitely outside or in an area where it is not possible to definitely say that is inside or outside. This classification depends on the precisification process. The vagueness of such regions is called “first-order vagueness”. However, for some regions, even after precisification, there are locations that cannot be exactly assigned to one single class. Such regions are said to be of “second-order vagueness” according to Kulik’s definition [
34]. As an example, a canyon is characterised as a narrow valley. The narrowness can be measured by the width of the canyon floor. As such, setting a maximum slope gradient fixes the definition of the canyon floor and brings down the definition from second-order to first-order vagueness; then, fixing a maximum width value defines narrowness and removes the last order of vagueness.
Considering landforms as second-order vague regions, locations that are part of the landform for all precisifications are said to make up the core of the landform, and locations that are part of the landform for at least one precisification constitute the hull [
34]. The salient element is the characteristic part of the landform and forms its core, since it is the part that is always perceived within the landform. As this salient element is usually a point or a linear element representing the backbone of the landform, we call it the landform skeleton.
Similarly, any location outside the hull cannot be part of the landform, and the hull shall be delineated by salient elements that all users would identify as being outside the landform. In the case of valleys and canyons, the inner skeleton is the thalweg line at the bottom of the landform, and the hull is the set of ridges delineating the catchment area of the thalweg.
The skeleton corresponds to the smallest possible core, but people think mostly about space in terms of regions rather than of points and lines [
36]. For example, in both Straumann and Purves’s and Cortés Murcia et al.’s works, the valley and canyon floors are the elements used to define the core of the landform. Defining these core regions is carried out using some morphometric predicate. The valley or canyon floor is defined either as the flat area surrounding the thalweg or as the area bounded by a break of slope. This transformation process corresponds to a precisification, bringing the landform from second-order vagueness to first-order vagueness where the core region corresponds to the locations that surely belong to the landform.
In a similar way, the hull corresponds to the maximum possible extent, but depending on the context, the precisification can yield a smaller region in which the landform can lie. Following Bittner’s terminology [
37], the precisification yields three regions, a core region in which any location is part of the landform, a wide boundary, which is the area where a location may be part of the landform, and an exterior, where locations are not in the landform. By construction, the core region always contains the skeleton, and the hull always contains the wide boundary, which in turn surrounds the core region. Cortés Murcia et al. delineated the canyon hull by the ridge lines around the thalweg, but did not characterise the wide boundary, while Straumann and Purves look at the valley slopes to define a valleyness index. This corresponds to bringing the landform to first-order vagueness. The wide boundary can then be fixed by choosing a valleyness threshold, removing the vagueness.
3.2.2. The Landform ODP
Concepts introduced in the conceptual transformation stage shall allow for the expression of the different geometrical properties attached to the salient element and to the landform in general. The set of landforms considered for a given task and domain can be described using an ontology. An ontology provides a logical structure to encode landform descriptions. Each new domain or task requires the design of a new ontology. In order to provide a formal description that applies to different contexts and to allow the model to be used by people who are not ontology experts, we defined a landform prototype as a customisable knowledge structure. We specified this prototype as an ontology design pattern (ODP), which is a small reusable piece of ontology providing a generic solution to a modelling problem [
38].
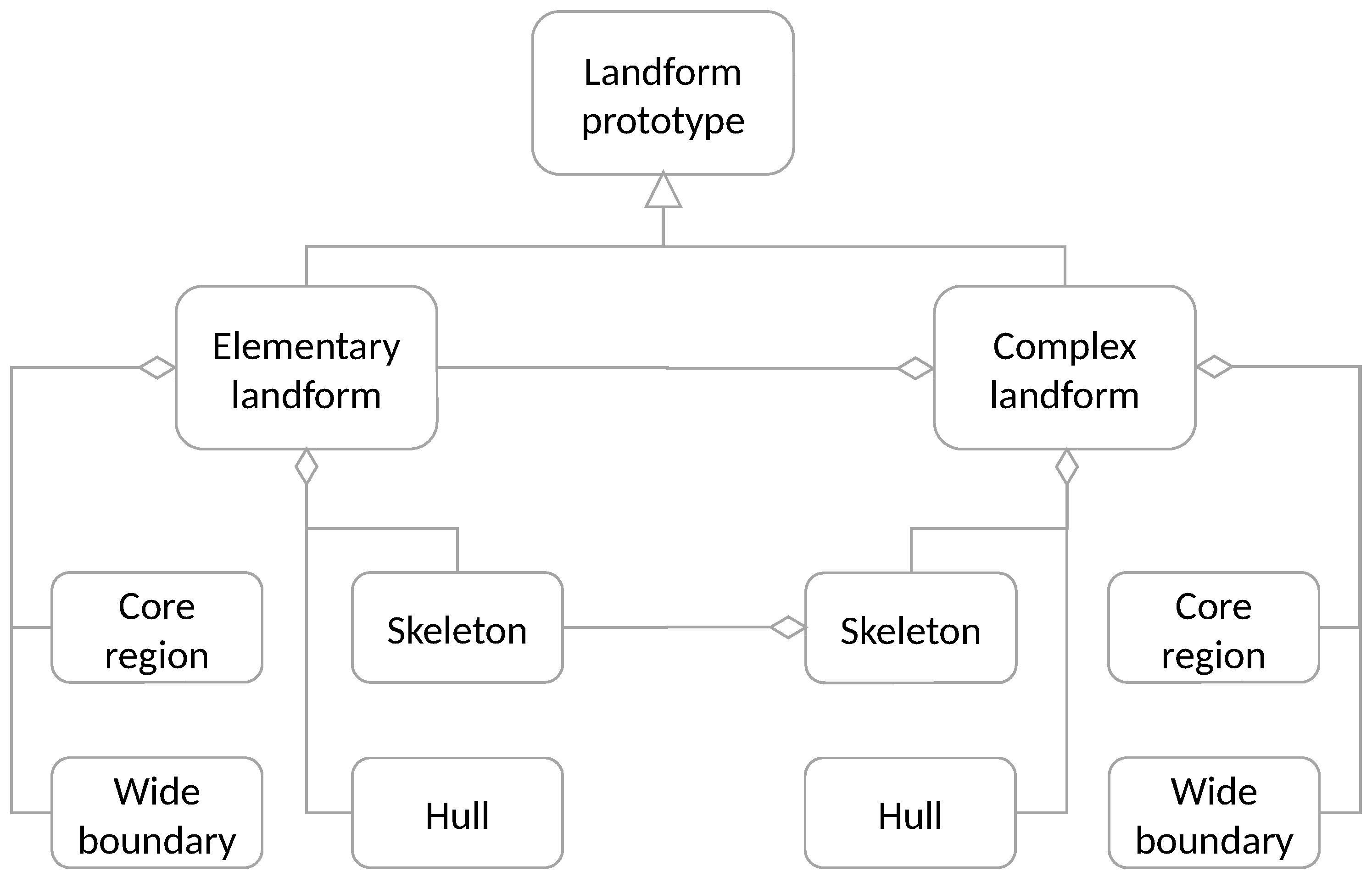
Moreover, in our framework, we define a landform prototype as a finite set of properties used to abstract the terminology and the context that have been chosen by the user and the domain expert during the landform analysis stage. The landform ODP provides a generic structure, which can be customised to define any landform. The core concepts of our landform ODP are summarised in
Figure 2. The skeleton is defined by a geometrical shape, by morphometric characteristics and other thematic attributes. Similarly, the core region and wide boundary are described by some morphometric or thematic characteristics. We consider two kinds of landforms that share the same properties: elementary and complex landforms. However, these two kinds of landforms are associated with different prototypes because they are characterised through two different processes. We see in
Figure 2 that a complex landform is composed of elementary landforms that are parts of the complex landform.
Elementary landforms are primarily defined by their salient elements. Therefore, their identification on a terrain is carried out first by recognising skeletons that meet the landform requirements and second by identifying the region surrounding the skeleton. The skeleton is a simple geometry, such as a point or a line, which should match some characteristic features of the terrain. The core region and the wide boundary are represented by polygons built around the skeleton. Their extent is defined by attributes translating the properties chosen during the landform analysis phase. For example, a submarine canyon is an example of an elementary landform. The perception of a canyon relies first on the perception of a thalweg line that is significantly lower than its surroundings and then on the characterisation of the narrow canyon floor and the steep sides.
Complex landforms are not characterised by their saliences, but by a specific arrangement observed over a terrain. This is mostly the case for compound groups of landforms, such as mountain ranges, whose existence depends on the existence of several individual mountains. Mountains are characterised by their summits and connected by their ridge lines. Hence, a skeleton can also be defined in these complex landforms, since it provides the landform with a topological structure from which shape characteristics can be extracted. Moreover, skeletons can also provide the support for a topological structure connecting landforms together and allowing for further reasoning based on their spatial configuration. The skeleton of a mountain range is not only a set of summits, but it is also the network of summits and ridges connecting its mountains. The core region of a complex region is not simply the union of its composing landforms. It has its own definition consistent with its semantics. For example, the core region of a mountain range would logically include valleys separating eminences.
To sum up, during the conceptual transformation stage, a spatial data specialist uses the landform ODP to specify the set of concepts that correspond to the definitions chosen by the user and the domain experts during the landform analysis stage taking into account the phenomenon scale and the user’s goals. Moreover, these landform concepts need to be characterised by attributes that can be computed using data from the terrain model. They must also be compatible with the landform properties initially selected with the landform definitions by the user and the domain expert. To this end, we propose that the spatial data specialist selects conceptual terrain descriptors that can be computed from terrain properties. Such descriptors can be chosen among commonly-used geomorphometric descriptors as those mentioned in
Section 2.1, such as the height, the slope and the curvature. However, spatial descriptors, such as the relative or absolute position, the slope position and the spatial extent, and thematic descriptors, such as the land cover and geomorphological processes, can also be selected. These conceptual terrain descriptors are specified using mathematical equations or enumerations. For example, the slope is given by the norm of the terrain gradient
. Other slopes, such as the transversal slope, are given by the first derivative along a direction normal to the skeleton.
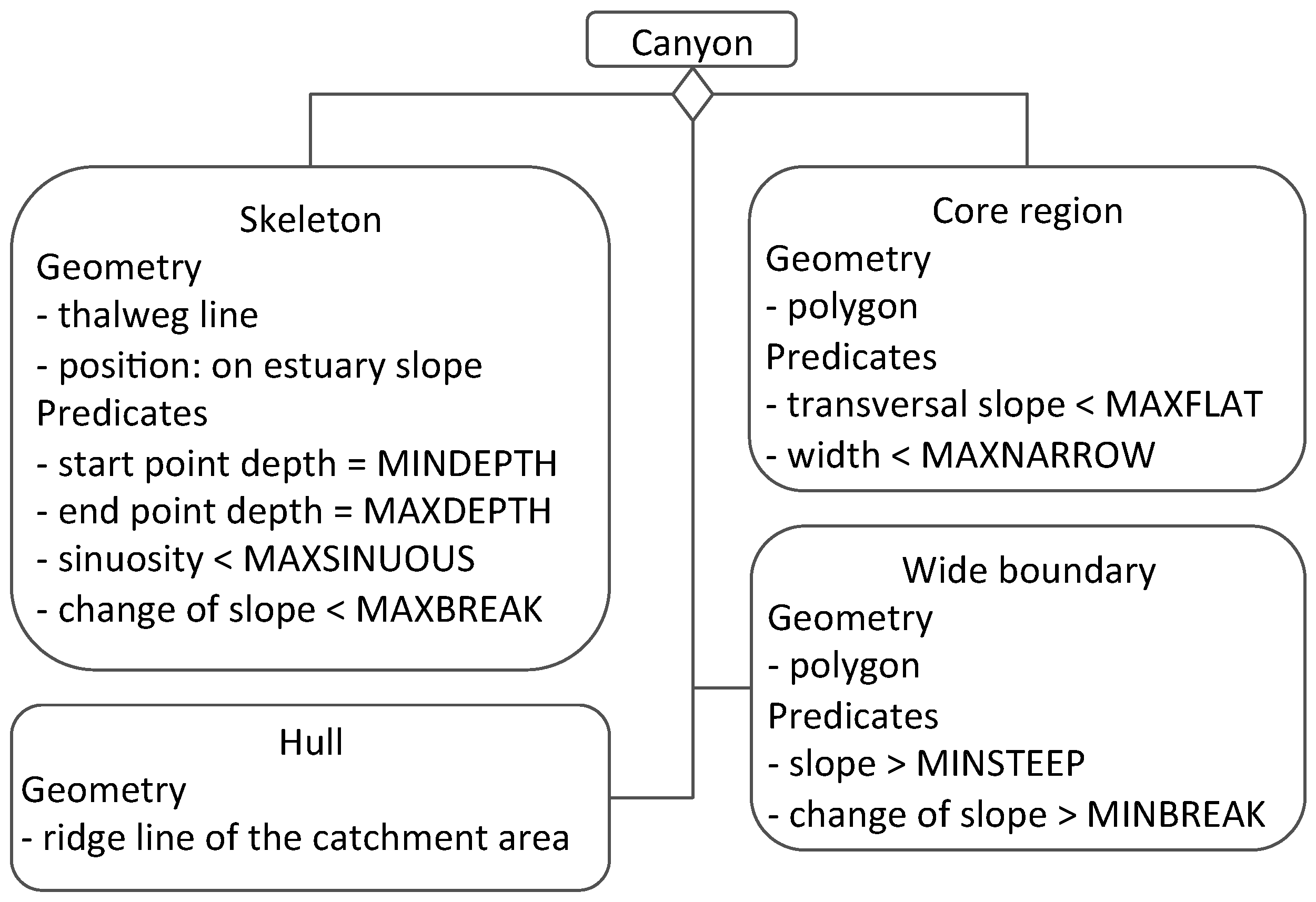
Let us see how this conceptual transformation has been applied to our case of submarine canyons. Using the landform ODP and the definitions of the submarine canyon (see
Section 3.1), our spatial data specialist has created the conceptual structure displayed in
Figure 3. A canyon is described by a set of attributes, which are either geometrical attributes defining the position and shape of the canyon or predicates (i.e., logical expressions) translating qualitative properties into quantitative indicators, which can be compared to some threshold value. According to the definition selected during the landform analysis, the skeleton is defined by a thalweg line, which has to run across the slope, running in a straight line from the shelf down to the floor. The correct positions of starting and end points are checked with the point depths. The starting point shall be located at the top of the slope, while the end point is at the bottom, close to the estuary floor. Hence, their depths shall be equal to some depth values defined by the parameters MINDEPTH and MAXDEPTH. The canyon running along a straight line is evaluated by its sinuosity, which is defined by the ratio between the length of the canyon and the straight line connecting its extremities. The closer to the value of one is the ratio, the straighter is the canyon. This also corresponds to a ceiling value MAXSINUOUS. Finally, the slope along the thalweg shall be regular without big breaks of slope. Hence, the change of slope for points other than the extremities should be smaller than a value MAXBREAK.
Our canyon landform’s hull is defined by a ridge line delineating the catchment area of the canyon. The core region is defined by a polygon. It is characterised as a flat area around the skeleton whose transversal slope is smaller than a MAXFLAT value. The floor of a canyon is also narrow; hence, the width of the core region has to be smaller than the threshold MAXNARROW. While the latter is an absolute value, the former is relative and is defined by the average transversal slope measured along the skeletons. Finally, the wide boundary was not defined in [
12], but can be associated with a polygon and characterised by a slope position or a minimum slope, as the canyon has steep sides and is delineated by a break of slope on its borders.
At the end of the conceptual transformation stage, we obtain a set of landform concepts defined by a set of precisely-defined conceptual attributes. These attributes correspond to geometries that need to be identified on the terrain model and to predicates applied to some terrain descriptors, which also need to be evaluated on the terrain model. The qualitative definitions selected during the landform analysis stage have been precisified during the conceptual transformation stage thanks to the selection and specification of quantitative parameters (i.e., the conceptual attributes) that are independent from any particular terrain representation (i.e., the dataset chosen to characterise the terrain). The next stage, the logical transformation, will take into account the constraints that will influence the software development of the user application that will effectively implement these parameters and the associated algorithms.
3.3. The Logical Transformation
The logical transformation stage consists of producing a data structure describing the landforms that is implementable in software that fulfils the user’s goals and requirements. Indeed, this data structure depends on how the terrain and the salient elements are modelled. Most commonly-used models are rasters and grids obtained from aerial and satellite imagery. Other potential structures to model a terrain are the triangulated irregular network (TIN) and sets of contour lines and spot heights, as found on topographic maps. A TIN provides a more adaptive structure that is directly applied on point clouds and can be used to reduce the number of points of the dataset. Isobaths and soundings portrayed on a nautical chart have been used in [
39] to identify undersea features. However, the number of isobaths and soundings found in these charts is not sufficient to compute terrain descriptors.
Selecting a data structure at the logical transformation stage depends on the type of data available. It also depends on the analysis scale, which sets the required resolution for the data. The computation of terrain descriptors can be done equivalently on a raster or on a TIN, but the choice can also take into account performance and precision issues. Such issues have been discussed in detail in [
10], where the authors propose a formal process for the definition of a reliable terrain model.
Predicates can be specified and evaluated on the terrain model by discretising the conceptual terrain descriptors. For example, slopes and curvatures are computed by finite difference schemes. Discretisation depends on the analysis scale, which corresponds to the resolution at which values are computed and defines the minimal resolution required for the terrain model.
Landform salient elements are usually defined using morphometric features of the terrain. Different approaches can be used depending on the application domain. Morphometric classification can be used to classify pixels as mentioned in
Section 2.1. It can be used to identify peaks, pits and saddles as potential salient features. Ridge and thalweg classification performs a pixel classification, but lines may not be identified since they may be interrupted or they may form clusters. Moreover, the structure most commonly used to extract critical lines is the drainage network computed by the flow accumulation. This model applies to raster data. It identifies streams and their drainage area. Streams are associated with thalweg lines, while drainage divides can be associated with ridge lines. Another interesting structure is the surface network [
40], which also identifies peaks, pits and passes and yields an explicit topological structure. Such a structure is robust since it obeys connectivity rules and guarantees that peaks and pits are always connected to ridges and thalwegs.
Interestingly, algorithms for surface network extraction have been developed for both raster [
41] and TIN [
42]. They can be put into use in the logical transformation stage of our framework. The concepts required to model the surface network, including topological rules, are provided in an ODP previously proposed in [
43]. Such an ontology provides concepts and properties for the storage and exchange of the surface network as linked data. However, this ODP does not include the notion of level of detail that may be needed to represent salient elements at different phenomenon scales. Furthermore, to our knowledge, there exists no standard library that proposes such data structures, and specific libraries need to be developed to facilitate the integration of surface networks in terrain modelling application.
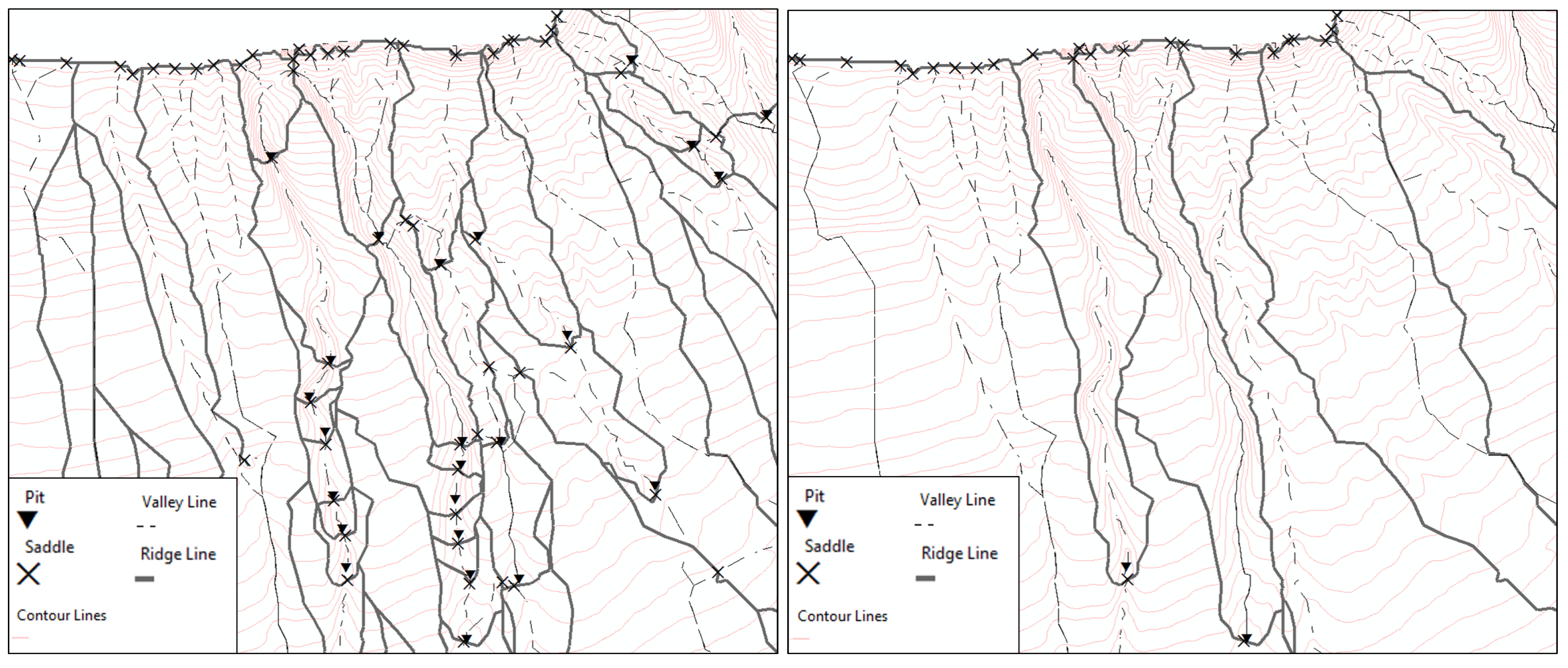
Going back to our submarine canyons, Cortés Murcia et al. [
12] identified canyons from a TIN, using the surface network to detect thalwegs and ridges. Since in this implementation, salient elements are connected in a graph, the skeleton of a canyon is defined by a series of consecutive thalweg lines from the top of the slope to the bottom. Skeleton attributes, such as breaks of slope, are computed between consecutive pits and passes along the thalweg. Cortés Murcia et al. simplified the surface network by removing nodes whose height difference with neighbouring nodes was not big enough [
29]. Because of the topology rules, removing one node meant removing another adjacent node together.
Figure 4 presents the thalwegs extracted from the TIN and the result obtained after simplification.
At the end of the logical transformation stage, the user has at hand a landform data structure composed of object classes defining the landforms. These classes were built from abstract data structures describing the DTM and the topological network of the terrain. All of these abstract structures shall be available in libraries or an API, so that a limited expertise in software engineering is required, and the implementation can be handled by the user and the data scientist, possibly advised by a software engineer. The approach has been illustrated on the submarine canyon, but shall be reusable for other landforms. In the next section, we discuss how it can be integrated with existing qualitative and quantitative approaches.
4. Discussion
4.1. Relationship with Existing Identification Methods
4.1.1. Valleys
The proposed framework is built on a conceptual model, which is applicable to landforms that can be described using a unified model. As an illustration, we discuss in this section how to apply our framework to the description of two generic types of landform taken from the literature: the valley, defined by Straumann and Purves [
11], and the eminence for which Sinha and Mark gave a formal definition based on its saliency.
Considering our landform analysis stage, we can start with the definition provided by Straumann and Purves for valleys: “low areas or depressions relative to their surroundings, elongated, (gently) sloping and often containing a stream or a river”. As a lower and elongated form, a valley is characterised by its thalweg, surrounded by the valley floor, which is a comparatively broad and flat area. Hence, the salient element is the thalweg, and the two properties characterising a valley are ‘to be low relative to its surrounding’ and ‘to be elongated’.
Then, at the conceptual transformation stage, we can transform this definition into a conceptual model. Considering our landform ODP (
Figure 2), the valley skeleton is defined by a ‘thalweg line within a sub-basin’. Hence, a stream line going through several sub-basins is divided into several valley skeletons. Valley floors are defined as “relatively flat area bordering thalwegs”. A point is considered to belong to the floor if its slope measured from the thalweg is below a given threshold. To evaluate if a point in the drainage basin lies in the valley, a valleyness index, reminiscent of fuzzy logic, is used. Three indices are proposed. First, the relative elevation index is the ratio between the elevation of a point and the height of the sub-basin measured from its lowest point. Second, the convexity index is based on a combination of the convexity at a point and its distance to the floor. A point located on a convexity far from the floor is assigned a low membership. Points outside the basin are assigned a membership of zero, while points in the valley floor are assigned a membership of one. The last index is the average of the first two.
The valley floor can be logically considered as the core region of the valley. Considering the convexity index, the core region corresponds to all of the points of the floor that have a membership of one. However, this is not true with the relative elevation index, since valleys located in relatively flat regions can yield low relative elevation index values. Indeed, in such a case, the core region would correspond only to the lowest points of the valley. The hull corresponds to the sub-basin since points outside of this zone (with a membership of zero) are excluded from the valley. No wide boundary is defined, but a valleyness index is associated with each point in the hull.
At the logical transformation stage, landforms are obtained from a raster model, which provides the drainage network. Valleys can be of different sizes since a specific phenomenon scale has not been chosen, but the network can be pruned by clipping subnetworks whose Shreve order is too small. In Straumann and Purves’ experiments, a number of slope thresholds were tested to define the valley floor, and a threshold of 1.5 degrees was defined empirically. Results yielded by the valleyness index were assessed through a questionnaire where users had to recognise valleys from photographs, and the authors found a positive correlation between the index and the perception of a valley by the respondents.
To conclude, our framework provides a principled approach to start from Straumann and Purves’ definition of a valley to specify the concept of a valley using our landform ODP and to implement it using a raster model, which provides the drainage network.
4.1.2. Eminences
Sinha and Mark define topographic eminences as “landforms that are elevated above their immediate surroundings” [
8]. Topographic eminences can have a conic shape and be characterised by their summit or be non-conical with a flat top. The authors only focus on the first type of eminences. They consider that for a landform to be recognised as an eminence, it shall stick out from its surroundings and, as such, be either significantly higher than other possible eminences or be isolated from them. Therefore, two properties are considered to characterise an eminence: its prominence, i.e., its height compared to its surroundings, and its isolation, i.e., the distance to other eminences.
At the conceptual level, prominence and isolation are measured from the peak since it is the salient element that characterises the eminence. The authors define prominence as “the height of the peak in the largest encircling area that does not contain any higher peak” and isolation as “the horizontal distance to the next highest eminence”. Both values are measured between the peak and the saddle connecting the eminence to the nearest higher eminence [
8]. Eminences are delineated by catchment boundaries coinciding with stream channels and valley lines (thalweg lines) and can be extracted by a drainage segmentation method. Three parameters are considered to identify eminences and are applied to the summit: the summit must be above a minimum elevation, above a minimum prominence and beyond a minimum isolation distance.
Considering our landform ODP (
Figure 2), the skeleton of a topographic eminence is its summit, defined by a point, and its hull is defined by thalweg lines surrounding the eminence; any point beyond this line would belong to a neighbouring or a larger eminence. Several sets of thalwegs can be considered depending on how large and isolated the eminence is. Prominence and isolation control the level of detail and can be used to define a phenomenological scale.
Other authors proposed a narrower definition of the extent of an eminence by identifying what is part of an eminence and what is not. These works consider more specific types of eminences, such as mountains. For example, the International Hydrographic Organization defines a seamount as “A distinct generally equidimensional elevation greater than 1000m above the surrounding relief as measured from the deepest isobath that surrounds most of the feature” [
33]. An interesting approach is proposed by Chaudhry and Mackaness [
28], who also take into account the morphometric characteristics of the terrain and identify the contour that best fits with the morphometric classification.
Sinha and Mark do not take into account a core region or a wide boundary, since they only define eminences by the skeleton and the hull. The core region can be defined for example by a slope position, the shoulder, at the conceptual level. At the logical level, delineation of the core region can be done by one of the criteria presented in
Section 2.1, such as breaks of slope or geomorphons.
In
Table 3, we sum up the characteristic properties of the three types of landforms that we described in this section and in the previous section. From these definitions, it is clear that submarine canyons are subtypes of valleys and that they can be defined as ‘narrow steep-sided submarine valleys running across the continental slope’. Hence, using our approach, a set of landforms composing a domain can be organised in a hierarchy of landforms (using a generalisation/specialisation relation) where specialised landforms share the properties of more generic landforms (defined at a higher level in a hierarchy). Such a hierarchical classification allows for the description of landforms at different levels of granularity.
4.1.3. Comparison of Different Approaches Usable for the Logical Transformation
Algorithms based on the extraction of the drainage and watersheds as used in [
8,
11] apply to raster data and are often readily available in GIS software. They reflect different choices that can be made at our logical transformation stage. Drainage lines are selected using a flow accumulation threshold. However, a drainage system is not identical to a system formed by thalwegs, although it is quite close. Furthermore, the extraction of the drainage often requires some preprocessing, such as fill sink, to remove artefacts that may yield inconsistent results.
The surface network applies to both raster and TIN data and does not require preprocessing. It always produces a topologically-correct graph even on rough terrain. However, the level of detail may need to be adjusted to the required scale by applying simplification operations to the network [
45]. Furthermore, the surface network yields a topological structure that can be used to assess skeleton properties. For example, Cortés Murcia et al. used the surface network to compute the height difference between consecutive pits and saddle points along the thalwegs and to simplify the network by removing nodes and collapsing edges that do not meet the skeleton definition [
12].
Considering object-based image analysis as in [
11], the vagueness of a landform is dealt with using fuzzy logic approaches, and a fuzzy membership value is associated with each pixel. In our approach, we do not assign a value per pixel, since we reason at the object level. Nonetheless, the skeleton and the hull can be thought of as regions where fuzziness is either one or zero. It corresponds to a first-order description of vagueness where the boundary of the landform is located somewhere outside the skeleton and within the hull.
In a fuzzy logic-based approach, removing vagueness is carried out by applying a defuzzification transformation where a threshold is set to choose which pixels are in and which are outside of a region. This reasoning still relies on a field representation of the terrain. In our approach, removing vagueness is carried out by setting the core region and the wide boundary. This approach is in our view more appropriate when reasoning with objects since the terrain is not perceived as an elevation field, but as an aggregation of objects, each of them being composed of different elements having their own semantics and relationships. This can be illustrated thanks to [
11], who defined two valleyness criteria: one criterion where the valleyness is set to one for pixels located in the valley floor and one criterion where the valleyness depends on the elevation. The first criterion is equivalent in our approach to setting the valley floor as the core area, while with the second criterion, pixels in the valley floor can have a membership lower than one without considering morphometric discontinuities. Hence, fuzzy logic approaches can still be accounted for by our framework at the logical level since the wide boundary and the core region can be obtained by a defuzzification process.
4.2. Application to Specific Geomorphology
Inspired by the principles of naive geography, our approach emphasises the notion of salient features to specify landforms as objects. Salience is a very important concept for the perception of landforms when adopting the point of view of specific geomorphology. It may not apply to a general geomorphology perspective considering that the terrain is divided into homogeneous areas according to their morphological characteristics.
In
Section 2.2, we mentioned other approaches relying on OBIA that are used for the description of landforms and geomorphological elements in general. Most approaches in geomorphology still rely on partitioning the terrain. Recognising their limitations, [
46] mentioned that instead of looking for homogeneous regions, lines forming morphological discontinuities may be recognised as natural boundaries. Furthermore, Minar and Evans [
46] describes relief at three levels:
Elementary forms that are the smallest, simplest, indivisible elements of the terrain;
Composite forms compounded from several elementary forms;
Land systems are patterns created by form associations.
These authors propose a new concept for elementary forms. They are defined as homogeneous elements computed from morphometric properties, usually functions of the elevation and its derivatives or by morphological discontinuities defined by lines separating the forms according to some boundary properties (e.g., discontinuity in slope or aspect). These morphometric elements can be thought of as patches that can be approximated by polynomial functions. An algorithm is presented in [
47] where zones are first delineated along elevation and slope and then along higher derivatives until each zone is homogeneous. This concept extends existing work by providing a broader and more adaptive definition of elementary forms. According to [
46], this definition could provide elements to be compounded in composite forms or used as core classes in a landform taxonomy.
This model was preferably designed for general geomorphology and for the extraction of large land systems. Elementary forms are still built from a field-oriented approach, relying on a full partition of the terrain and an a priori fixed scale. Lines defining morphological discontinuities are taken into account to delineate elementary forms, but are not considered for the identification of salient features.
In order to deal with specific geomorphometry, Drăguţ and Eisank [
24] introduced the concept of discrete geomorphometry, stating that objects obtained from segmentation could be used as intermediate building blocks to form larger landform divisions. Landforms would be first delineated and then classified. These authors also mentioned that object ontologies could be used to link segmented objects with concepts of real landforms, in line with what was proposed by [
21]. As an example, [
48] presented a conceptual model for glacial cirques. In this model, a cirque is defined as a concept having different properties, including a context property, which shall most likely describe spatial relationships with other landforms. To be computable, these properties are translated into geometrical properties. Considering the application of our framework to specific geomorphometry, we can say that Eisank et al. intervene at both the conceptual and logical transformation stages, while most previous work only took place at the logical transformation stage.
The fundamental idea of segmenting the terrain in small objects used to build bigger blocks is similar to [
46] and is common in OBIA. These authors suggest to first delineate landforms and then to classify them. In their approach to identify cirques, they first segment the terrain according to plane and profile curvature. One difficulty is that the result of the segmentation is highly dependent on curvature values chosen to define convexities and concavities, whereas the delineation of a landform is vague. We think that an approach based on the identification of salient features is more robust, since it is less subject to vagueness. For instance, in [
12], the identification of saliences is used in an initial step to locate potential canyons, while canyons are actually identified and delineated in a second step.
Emphasising the importance of conceptual modelling, Eisank et al. [
49] discussed the need for semantics-oriented landform classification with the purpose of having a semi-automated classification approach that could be reusable. These authors recognised that semantic modelling has been neglected so far, and as a consequence, models implicitly rely on their author’s knowledge and are specific to some areas and scales. As a move towards a conceptual framework, they proposed a four-step process that they describe in the context of glacial landforms, extending [
48]:
Identification and characterisation of landforms, where they are conceptualised;
Derivation of meaningful geomorphometric object hierarchies from land-surface models, based on multi-resolution segmentation;
Semantic modelling, based on the concept map approach (Cmaps), which matches landform facts with features measured in the digital domain;
Hierarchical landform classification, validation and testing.
Among these four steps, the first one has the same objective as our landform analysis stage defining a semantic core, including the size, shape and context in order to obtain reusable concepts. The second step consists of segmenting the terrain model into homogeneous objects at multiple resolutions. These objects would be the building blocks used to compose larger landforms. Such a step does not pertain to the analysis, nor to the conceptual modelling stages of our framework: it is based on data processing and segmentation algorithms at the implementation level and aims at identifying relevant scales at which landforms are located.
The conceptual model is designed in the third step by matching the properties obtained at the first step with the features measured on the terrain at the second step. Hence, Eisank et al. do not propose a formal landform conceptual model that would be independent of the data model and the computational issues. This limit significantly reduces the portability/generality of the model, each new application requiring one to repeat the semantic modelling step. The authors do not provide structured landform concepts, and as a consequence, a domain expert is always required to apply Steps 1 to 3. In our approach, the conceptual modelling stage is independent of the logical modelling stage in agreement with software engineering good practices. The conceptual transformation is based on a reusable landform design pattern, which allows the approach to be easily applicable to other landforms. Domain experts are required at the landform analysis stage to establish landform properties and at the conceptual transformation stage to define the landform components along with their attributes and predicates. Once the modelling process is completed, expert knowledge has been integrated in the model, and its operationalisation can be carried out by a user with limited expertise with the help of a spatial data analyst to implement algorithms and process data.
Moreover, existing OBIA methods do not take into account the notion of salience, while this notion is vital in qualitative approaches to conceptualise landforms. OBIA techniques aim at identifying homogeneous regions thought of as the basic unit for generating larger elements. OBIA researchers recognise that semantic information is important and that landforms shall be described conceptually. However, OBIA processes encompassing the analysis and the implementation steps have not been implemented yet, and in any case, they miss a formal structure that can be reused for the identification of different types of landforms. Our model contributes to developing such a reusable framework thanks to the definition of our landform ODP and shall be applicable by users in disciplines who need to model landforms in different contexts.
5. Conclusions
Landforms classification from a terrain model is still a difficult task because of the subjectivity of landform definitions. Considering that landforms are always described within a given context, we proposed in this paper a framework to formalise the landform classification and recognition process in different stages from the analysis of the landform definition to the construction of an object-oriented data structure that is implementable. At the landform analysis stage, landform terminologies are transformed into formal definitions in order to alleviate natural language ambiguity and avoid semantic heterogeneity. In the second stage, conceptual transformation, we suggest that landforms can be defined using a prototype data structure (the landform ODP) built upon four components: the skeleton, the hull, the core region and the wide boundary of the landform. Finally, during the logical transformation stage, concepts are transformed into object classes related to a particular kind of representation. The purpose is to provide a logical model that can be systematically implemented in software applications to process different kinds of landforms.
Our approach agrees with qualitative approaches and can be applied to specific geomorphometry. While all of the landform categories discussed in the previous section have not been implemented yet, the applicability of our approach has been discussed showing that concepts presented in different existing works can be reproduced following the different stages of our framework. Three types of landforms were addressed. In each case, the landform components have been identified. Removing vagueness from the attributes still relies on the definition of threshold parameters, which depend on the context, mainly the scale, and rely on a domain expert’s competence. Nonetheless, our model can help with specifying how these thresholds shall be set by relating them to contextual variables, as for example the estuary depth in the case of submarine canyons.
Our framework also contributes to OBIA models used in geomorphology since these models do not rely on salient features, but on basic units defined by homogeneous zones. Our approach also clearly separates the analysis and conceptual modelling stages from the logical modelling and the implementation stages, which was not done in previous works, such as [
49]. The use of an ODP also allows for defining landforms using a common generic data structure and for organising them in a hierarchy at different levels of granularity or detail. As in the example of submarine canyons, classifying landforms is first carried out by identifying their skeletons, providing a description of landforms at the lower levels of detail. Then, the application can achieve a higher level of detail by computing landform attributes from the terrain and assigning the landforms to more specialised classes.
Although the context is taken into account, our model is still limited since predicates rely on absolute values and landform concepts are designed independently. A first direction that we consider for future work is to enrich the conceptual model with relationships so that landform concepts can be related together in the conceptual model. This would help with replacing absolute thresholds by relative values that are directly extracted from data. For example, instead of defining the depth of a canyon by some absolute values, it would be defined in relation to the width of the continental slope where it is located.
In our current proposal and work, no formal structure has been defined at the end of the landform analysis stage, and the terminology may be given in natural language, meaning that the transformation of definitions into concepts at the end of the landform analysis stage needs to be mostly carried out manually. On a longer term, in order to represent knowledge in a more rigorous way, we plan to use conceptual graphs [
50] to provide a formalism that helps with processing the terminology into concepts. Some preliminary tests have been performed.
Dealing with complex landforms has not been addressed yet at the logical transformation stage. They are composed of elementary landforms, and as such, their identification shall be performed once elementary landforms have been identified. Their skeleton shall be defined by a network connecting elementary landforms, but their characterisation shall rely on the definition of attributes related to how landforms are distributed, such as the network shape, the density or the number of elementary landforms. For example, the existence of a mountain range may depend on the size of the range, but also on the number of mountains and how they are connected.
As stated above, landforms are characterised by salient features. This approach is consistent with naive geography, but does not apply to the identification of terrain elements that lack salience, such as plains, hillslopes or even terraces. Other noticeable elements, such as deltas and islands, were not considered in the context of this work, since at this stage of our research, we mainly focus on the morphometry of terrain elements, but not on water bodies. A delta may be seen as a kind of eminence, but cannot be defined as such at this stage. In this particular case, further knowledge about water bodies and sedimentation processes need to be included in the landform definitions. Nonetheless, Feng and Bittner [
7] showed that shoreline features can also be described using an ontology. As a consequence, if we aim at proposing a more exhaustive representation of landforms, other salient features apart from morphometric features can be considered. For example, bays can be identified from the shape of the shoreline [
7].
Finally, a formal standard could be developed for the logical transformation stage so that the landform data structure could be stored in an easily readable and exchangeable format. Since our framework relies on ODP and formal data structures at different levels, it would be natural to make use of RDF or OWL formats to specify the landforms.








{kind=link}
{kind=link}
{kind=link}
{kind=link}