
UAV Low Altitude Photogrammetry for Power Line Inspection



Abstract
:1. Introduction
2. Automatic Detection of Obstacles in Power Line Corridors
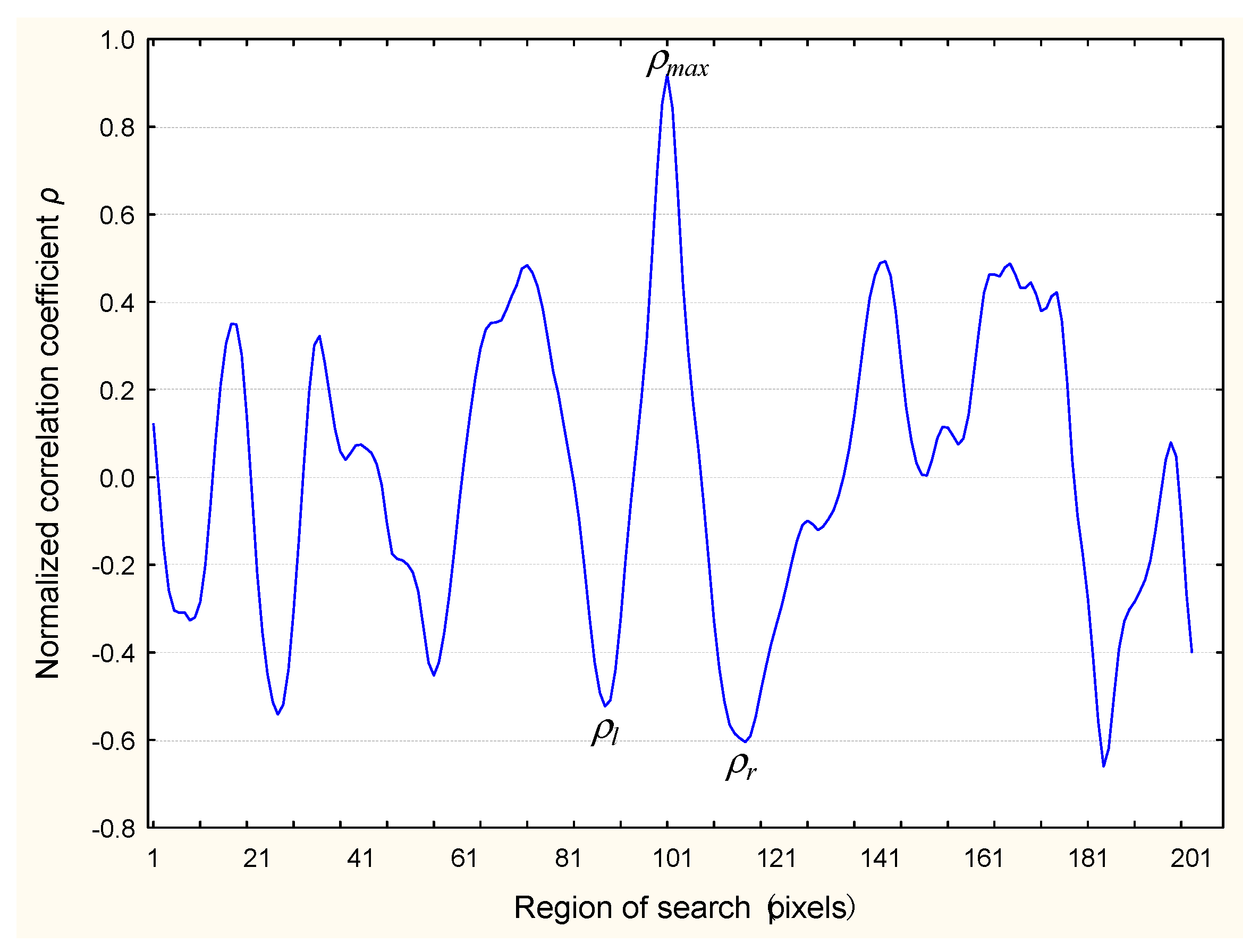
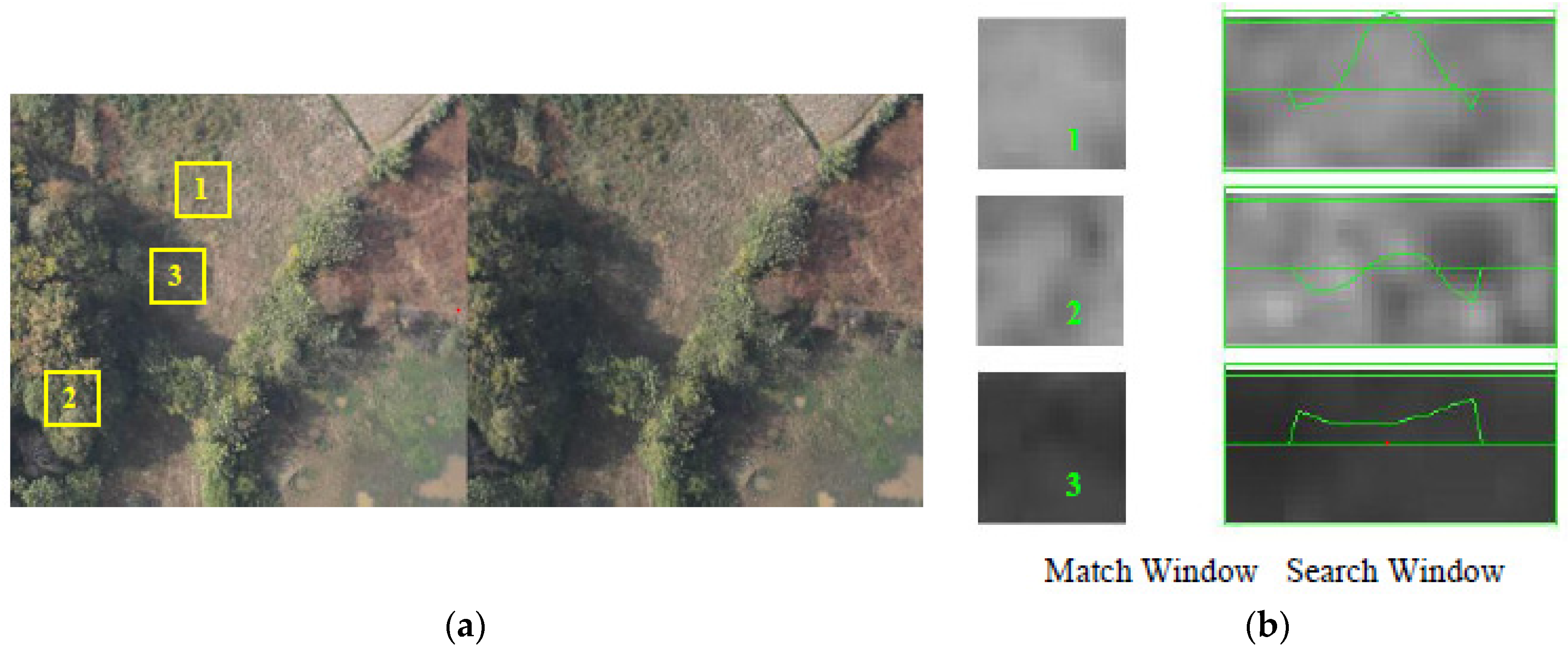
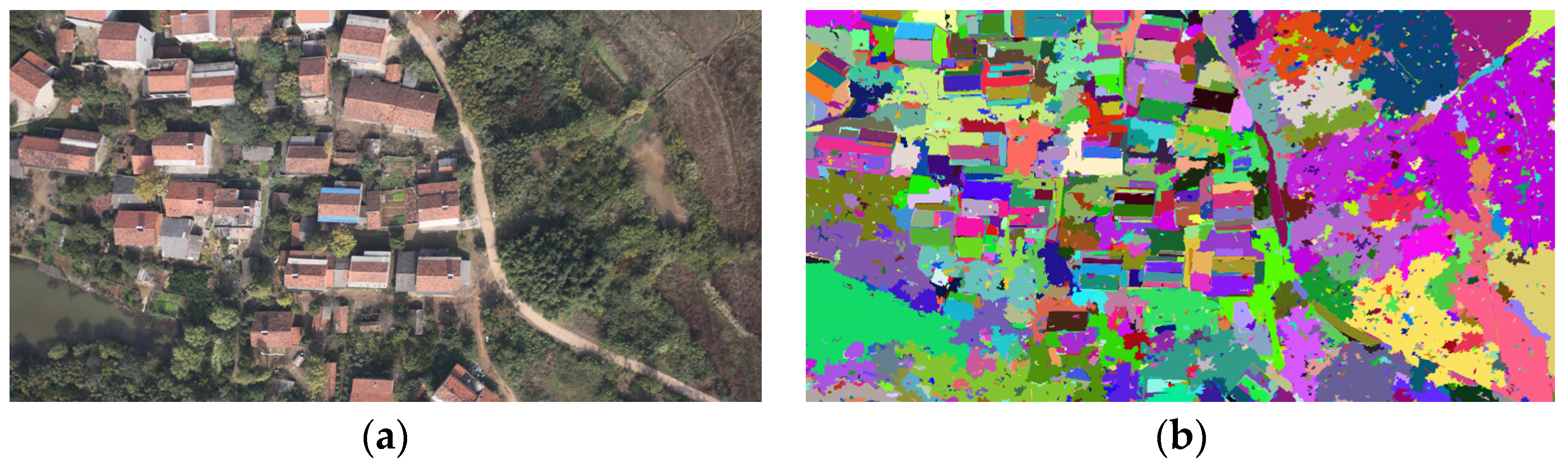
2.1. Semi Patch Matching Algorithm Based on Epipolar Constraints
2.2. Power Line Measurement Based on Stereo Image Pair from Inter-Strips
2.3. Automatic Detection of Obstacles in Power Line Corridor
3. Results and Discussion
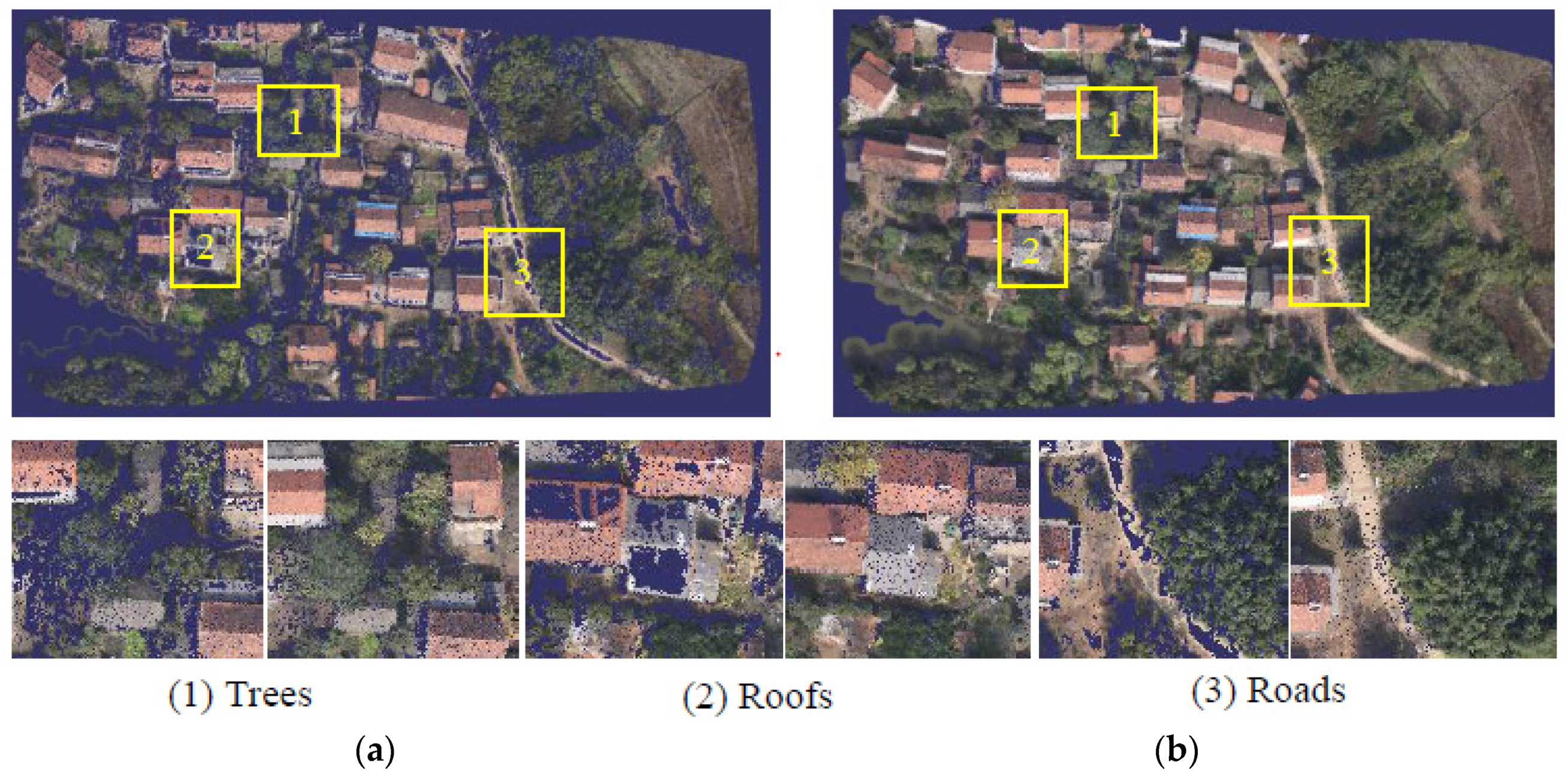
3.1. Experiments and Analysis of the Obstacles Detection of Power Line Corridor
3.2. Detection of Obstacles in the Power Line Corridor
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mu, C. Research on Extraction Method of Power Line Corridor Feature Based on Multi Remote Sensing Data. Ph.D. Dissertation, Wuhan University, Wuhan, China, 2010. [Google Scholar]
- Kuhnert, K.D.; Kuhnert, L. Light-weight sensor package for precision 3D measurement with micro UAVs E.G. power-line monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 235–240. [Google Scholar] [CrossRef]
- Ahmad, J.; Malik, A.S.; Xia, L.; Ashikin, N. Vegetation encroachment monitoring for transmission lines right-of-ways: A survey. Electr. Power Syst. Res. 2013, 95, 339–352. [Google Scholar] [CrossRef]
- Chang, A.; Wang, C. Mission planning of the flying robot for powerline inspection. Prog. Nat. Sci. 2009, 19, 1357–1363. [Google Scholar]
- Mulero-Pázmány, M.; Negro, J.J.; Ferrer, M. A low cost way for assessing bird risk hazards in power lines: Fixed-wing small unmanned aircraft systems. J. Unmanned Veh. Syst. 2014, 2, 5–15. [Google Scholar] [CrossRef]
- Cerón, A.; Mondragón, I.F.; Prieto, F. Visual based navigation for power line inspection by using virtual environments. Proc. SPIE 2015, 9406, 94060J:1–94060J:7. [Google Scholar]
- González-Jorge, H.; Puente, I.; Roca, D.; Martínez-Sánchez, J.; Conde, B.; Arias, P. UAV potogrammetry monitoring application to the monitoring of rubble mound breakwaters. J. Perform. Constr. Facil. 2016, 30, 04014194. [Google Scholar] [CrossRef]
- Miralles, F.; Pouliot, N.; Montambault, S. State-of-the-art review of computer vision for the management of power transmission lines. In Proceedings of the IEEE International Conference on Applied Robotics for the Power Industry (CARPI), Foz do Iguassu, Brazil, 14–16 October 2014.
- Hirschmüller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the IEEE Computer Society Conference on CVPR, San Diego, CA, USA, 20–25 June 2005.
- Yasutaka, F.; Jean, P. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1362–1376. [Google Scholar]
- Bleyer, M.; Rhemann, C.; Rother, C. Patchmatch stereo—Stereo matching with slanted support windows. In Proceedings of the British Machine Vision Conference, Dundee, UK, 29 August–2 September 2011.
- Zheng, S.; Hu, H.; Huang, R.; Ji, Z. Realtime ranging of power transmission line. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 704–707. [Google Scholar]
- Yuan, X.X. A novel method of systematic error compensation for a position and orientation system. Prog. Nat. Sci. 2008, 18, 953–963. [Google Scholar] [CrossRef]
- Shewchuk, J.R. Delaunay refinement algorithms for triangular mesh generation. Comput. Geom. 2002, 22, 21–74. [Google Scholar] [CrossRef]
- Gribbon, K.T.; Bailey, D.G. A novel approach to real-time bilinear interpolation. In Proceedings of the Delta IEEE International Workshop on Electronic Design, Test and Applications, Perth, Australia, 28–30 January 2004; pp. 126–131.
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient graph-based image segmentation. Int. J. Comput. Vis. 2004, 2, 167–181. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A paradigm for model fitting with application to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Lemmon, T.R.; Gerdan, G.P. The influence of the number of satellites on the accuracy of RTK GPS positions. Aust. Surviv. 1999, 44, 64–70. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Zhang, J.Q. Digital Photogrammetry; Wuhan University Press: Wuhan, China, 1997. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tower Section | Position of the Obstacle (m) | Distance between the Obstacle and the Power Line (m) |
|---|---|---|
| K182~K183 | 133.0–135.0 | 14.658 |
| 180.5–185.0 | 13.990 | |
| 188.5–189.0 | 14.865 | |
| 201.5–268.0 | 11.182 | |
| 119.5–123.5 | 12.137 | |
| 191.5–201.5 | 12.518 | |
| 204.0–206.0 | 13.809 |
| Elevation of 3D Point Cloud Gravity Center | Elevation of Manual Measurement | Elevation Difference |
|---|---|---|
| 138.313 | 138.720 | 0.407 |
| 135.709 | 135.644 | −0.065 |
| 133.423 | 133.632 | 0.210 |
| 131.511 | 131.414 | −0.097 |
| 129.975 | 130.411 | 0.436 |
| 128.813 | 128.804 | −0.009 |
| 128.027 | 128.164 | 0.137 |
| 128.632 | 128.053 | −0.579 |
| 129.721 | 129.765 | 0.044 |
| 131.185 | 130.857 | −0.328 |
| 133.024 | 133.308 | 0.284 |
| 135.237 | 135.683 | 0.446 |
| 137.826 | 137.376 | −0.450 |
| 140.790 | 141.163 | 0.373 |
| Root Mean Square Error of the Elevation Difference: 0.326 | ||
| Checking Point | X | Y | Planimetry | Elevation |
|---|---|---|---|---|
| 1 | 0.020 | −0.034 | 0.040 | 0.383 |
| 2 | 0.043 | −0.014 | 0.045 | 0.126 |
| 3 | 0.043 | 0.007 | 0.044 | 0.103 |
| 4 | −0.090 | −0.015 | 0.091 | 0.278 |
| 5 | −0.011 | −0.076 | 0.077 | 0.156 |
| 6 | −0.017 | 0.036 | 0.039 | −0.182 |
| 7 | −0.129 | −0.088 | 0.156 | 0.408 |
| 8 | 0.084 | −0.003 | 0.084 | −0.133 |
| 9 | −0.006 | −0.001 | 0.006 | 0.005 |
| 10 | 0.053 | 0.081 | 0.097 | 0.421 |
| 11 | 0.013 | −0.180 | 0.180 | 0.177 |
| 12 | 0.017 | −0.024 | 0.029 | 0.162 |
| 13 | −0.005 | −0.099 | 0.100 | 0.276 |
| 14 | 0.013 | 0.124 | 0.125 | −0.578 |
| 15 | −0.119 | −0.006 | 0.119 | 0.269 |
| 16 | −0.045 | 0.082 | 0.094 | −0.391 |
| 17 | −0.040 | 0.020 | 0.045 | −0.234 |
| 18 | −0.053 | −0.059 | 0.079 | 0.356 |
| 19 | 0.086 | −0.014 | 0.087 | −0.196 |
| 20 | −0.181 | 0.129 | 0.222 | −0.442 |
| Maximum Difference | −0.181 | −0.180 | 0.222 | −0.578 |
| Root Mean Square Error | 0.071 | 0.075 | 0.103 | 0.302 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Yuan, X.; Fang, Y.; Chen, S. UAV Low Altitude Photogrammetry for Power Line Inspection. ISPRS Int. J. Geo-Inf. 2017, 6, 14. https://doi.org/10.3390/ijgi6010014
Zhang Y, Yuan X, Fang Y, Chen S. UAV Low Altitude Photogrammetry for Power Line Inspection. ISPRS International Journal of Geo-Information. 2017; 6(1):14. https://doi.org/10.3390/ijgi6010014
Chicago/Turabian StyleZhang, Yong, Xiuxiao Yuan, Yi Fang, and Shiyu Chen. 2017. "UAV Low Altitude Photogrammetry for Power Line Inspection" ISPRS International Journal of Geo-Information 6, no. 1: 14. https://doi.org/10.3390/ijgi6010014
APA StyleZhang, Y., Yuan, X., Fang, Y., & Chen, S. (2017). UAV Low Altitude Photogrammetry for Power Line Inspection. ISPRS International Journal of Geo-Information, 6(1), 14. https://doi.org/10.3390/ijgi6010014