
3D Space Shift from CityGML LoD3-Based Multiple Building Elements to a 3D Volumetric Object

 ,
,
Abstract
:1. Introduction and Motivations
2. Related Work
3. Building Models in CityGML
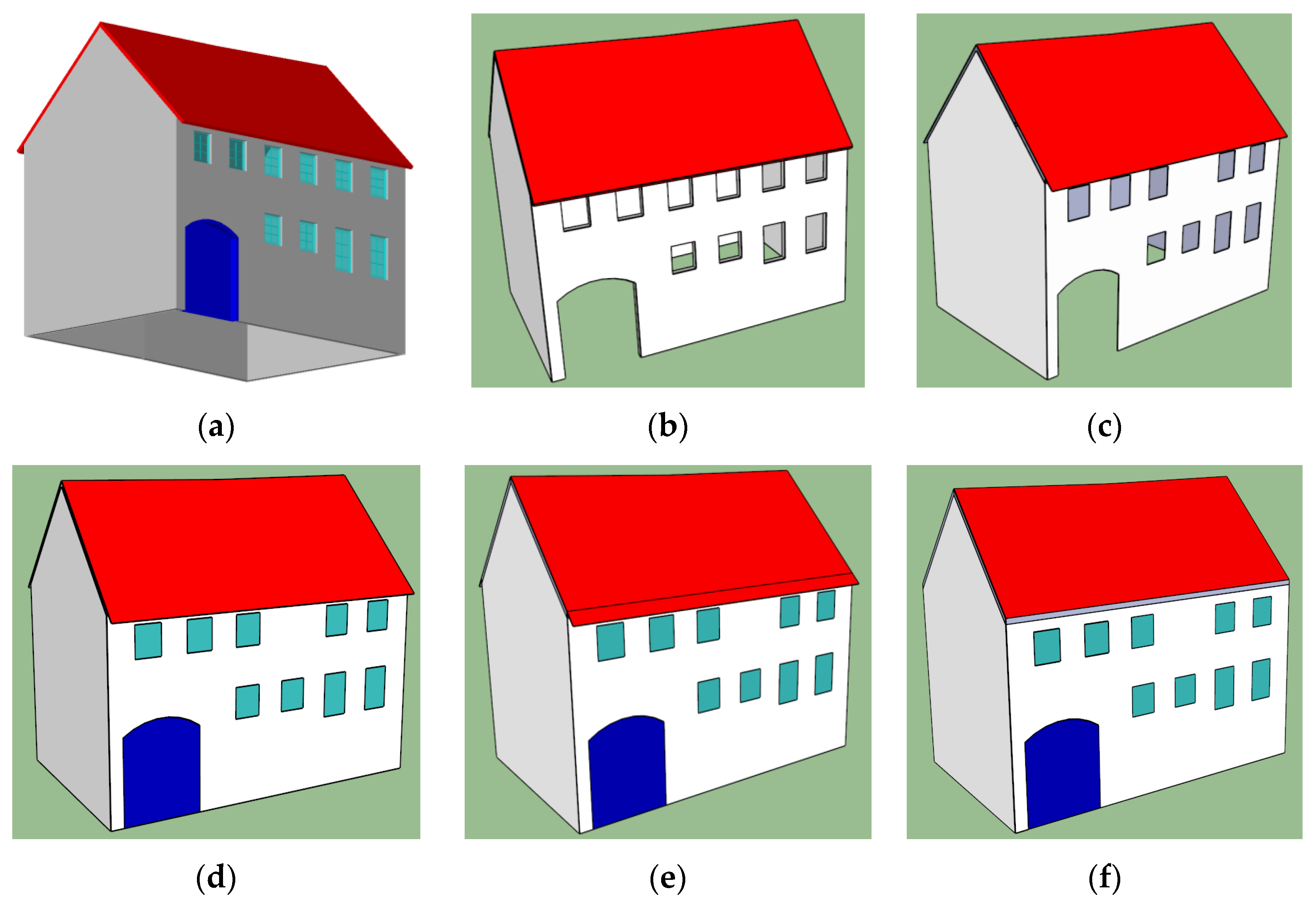
4. 3D Volumetric Construction from CityGML LoD3 and Its Simplification
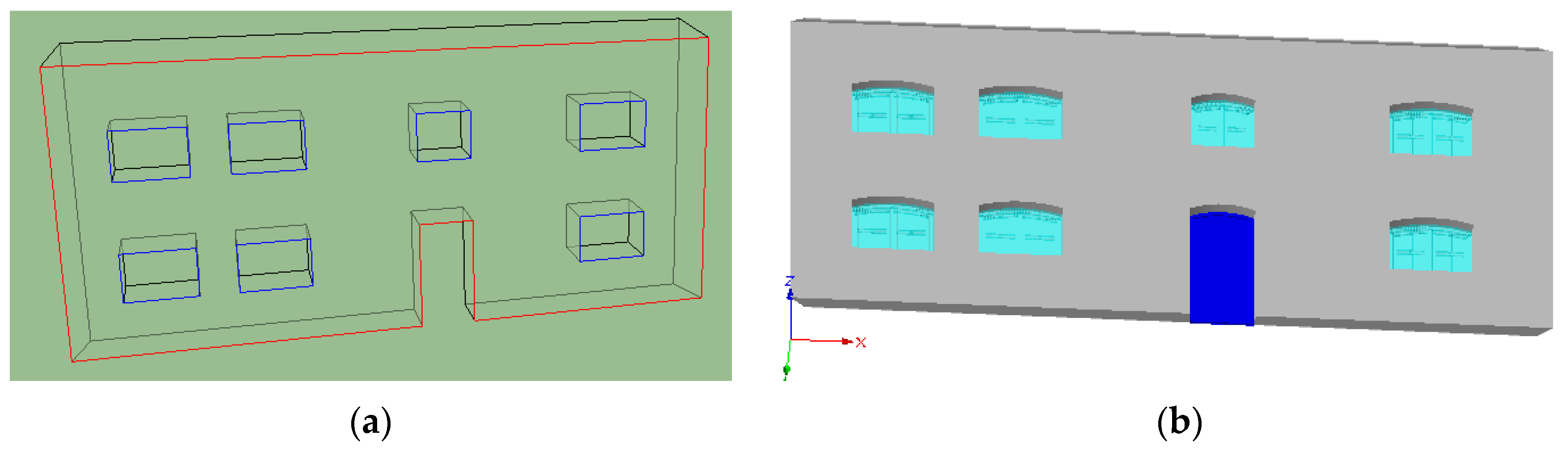
4.1. Filter and Extraction of 3D Building Elements from CityGML Data
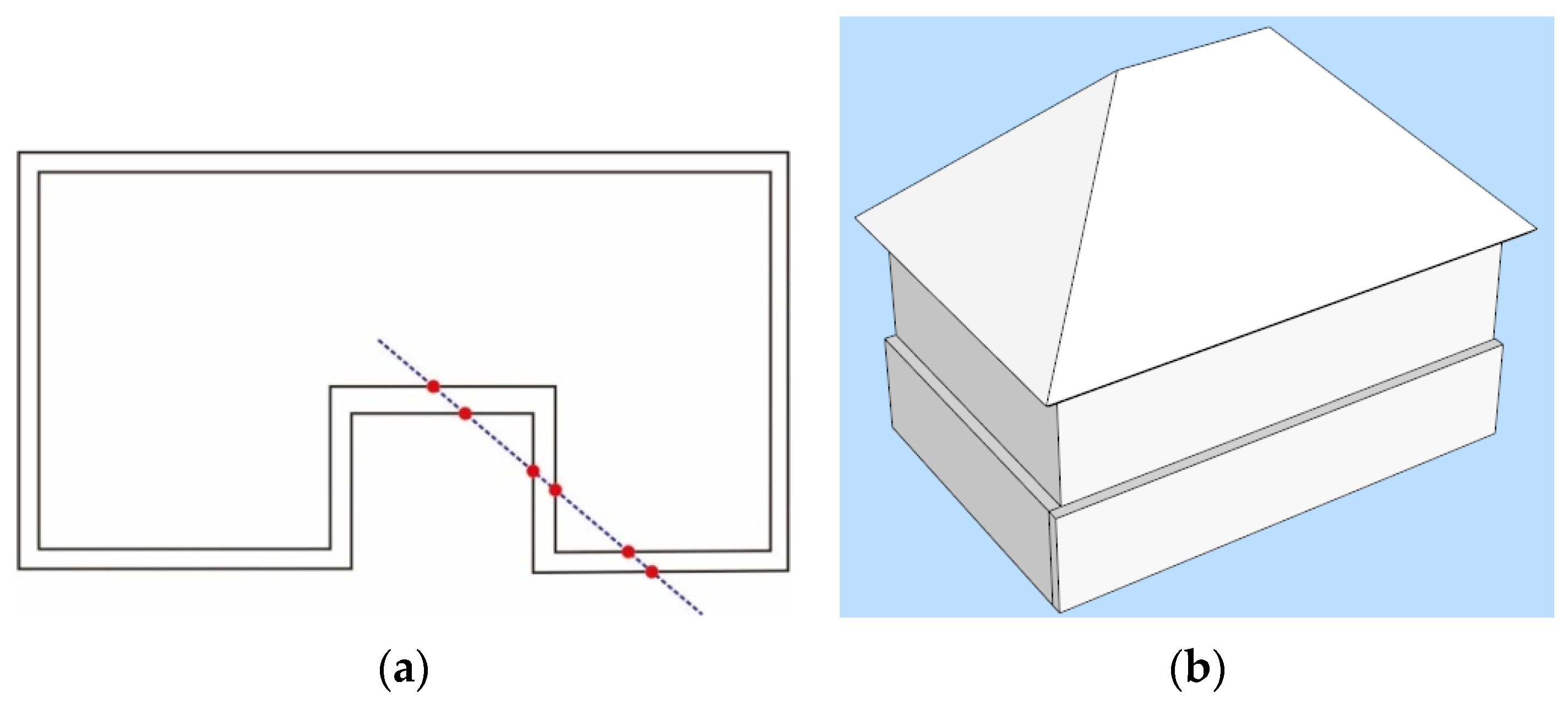
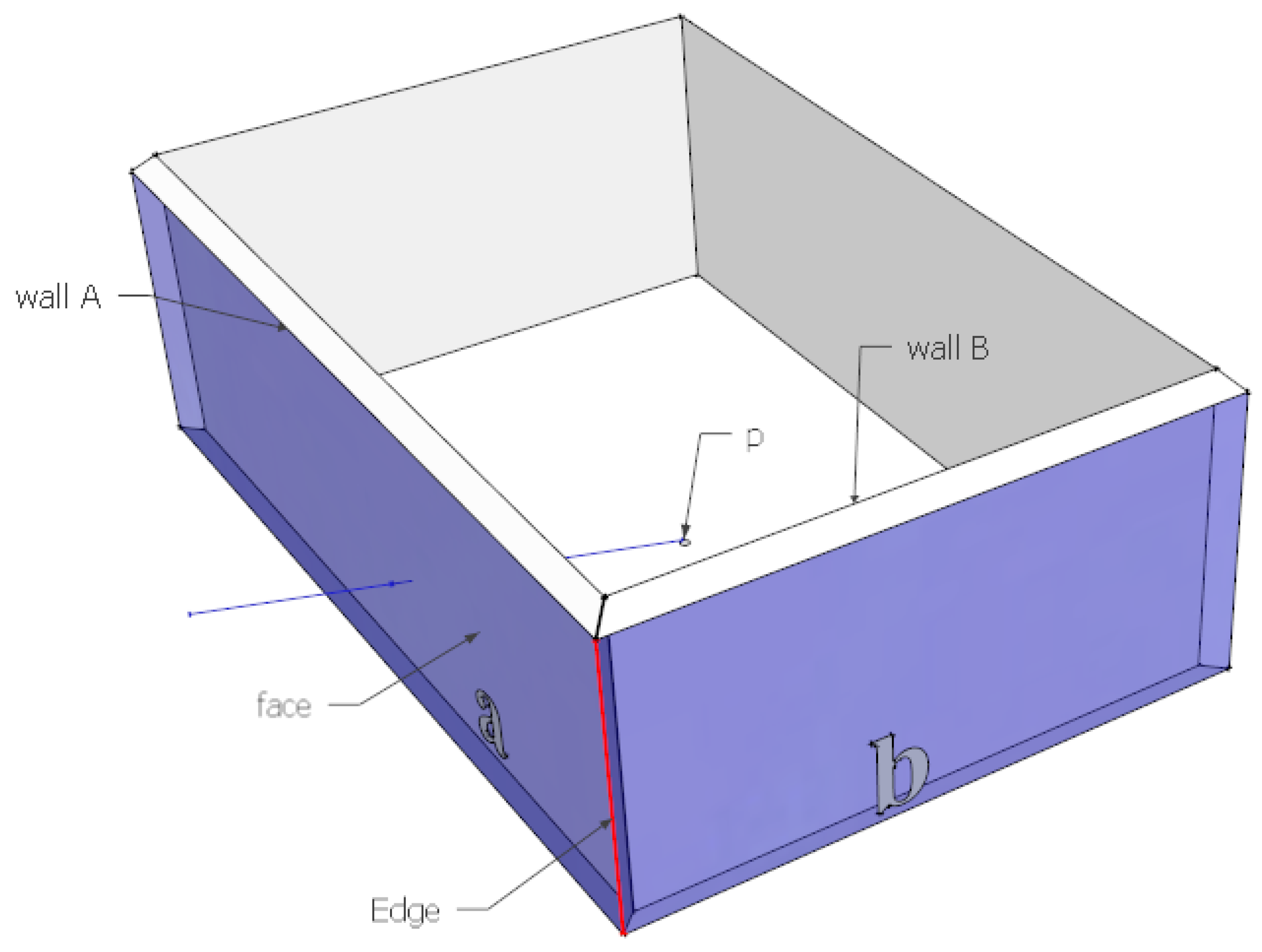
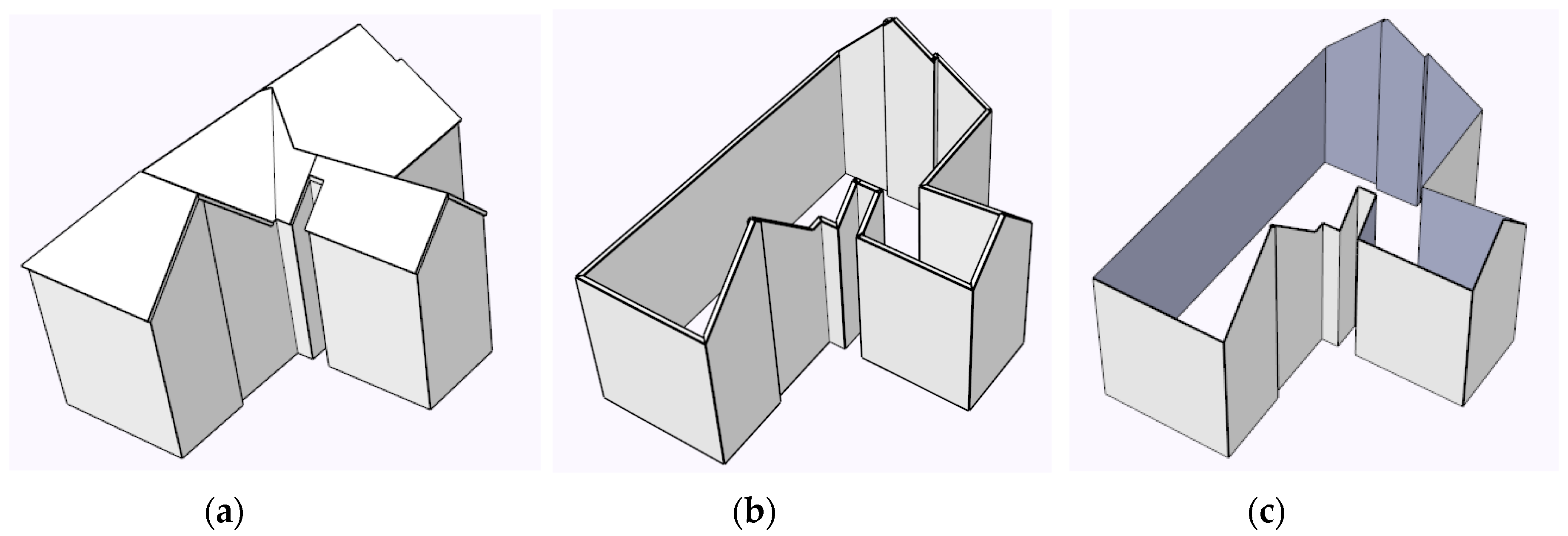
4.2. Outer Shell Extraction of the 3D Building
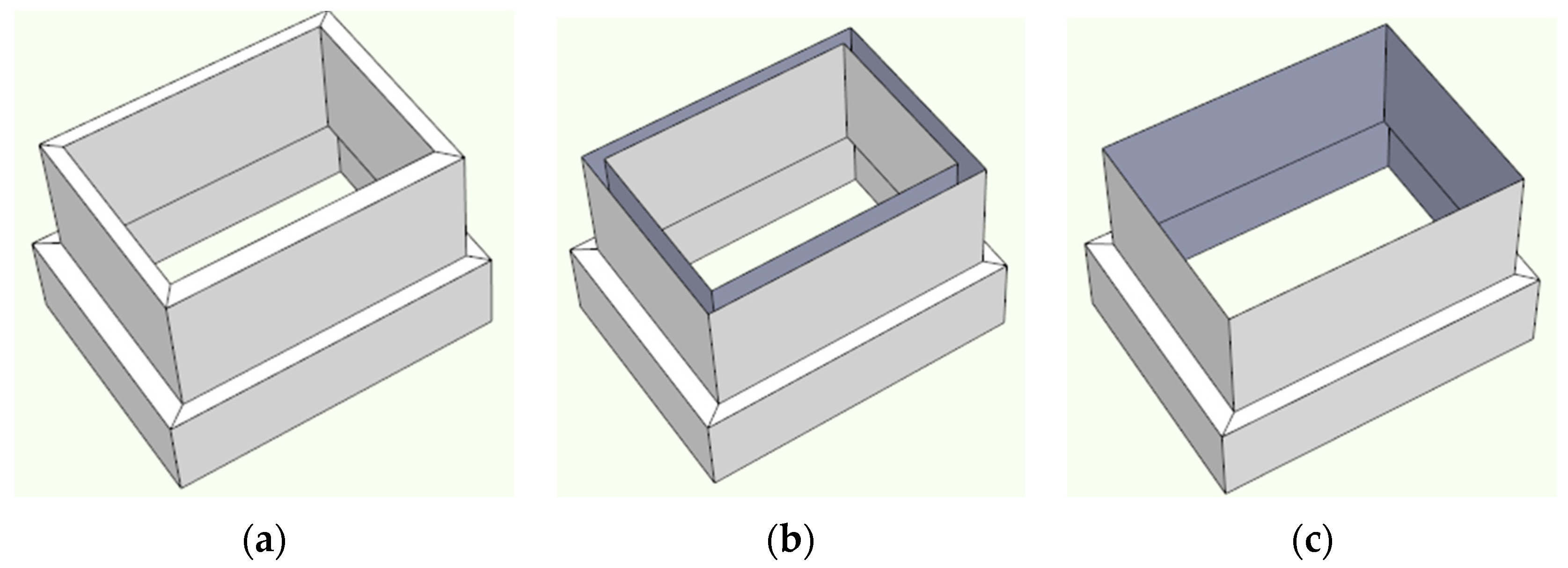
4.3. Repairing the Doors and the Windows
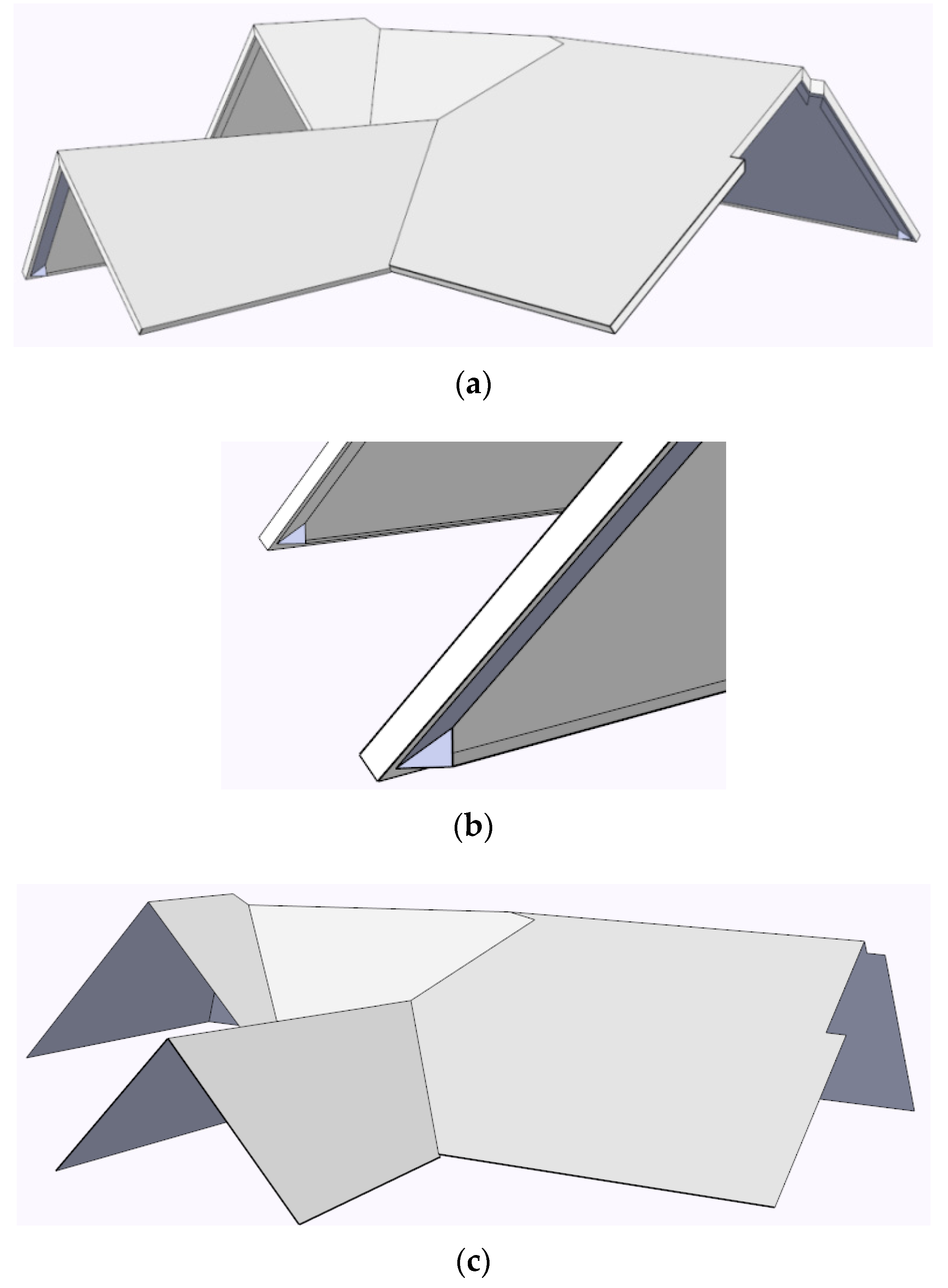
4.4. 3D Volumetric Building Construction by Connecting the Walls, Roofs, and Floors
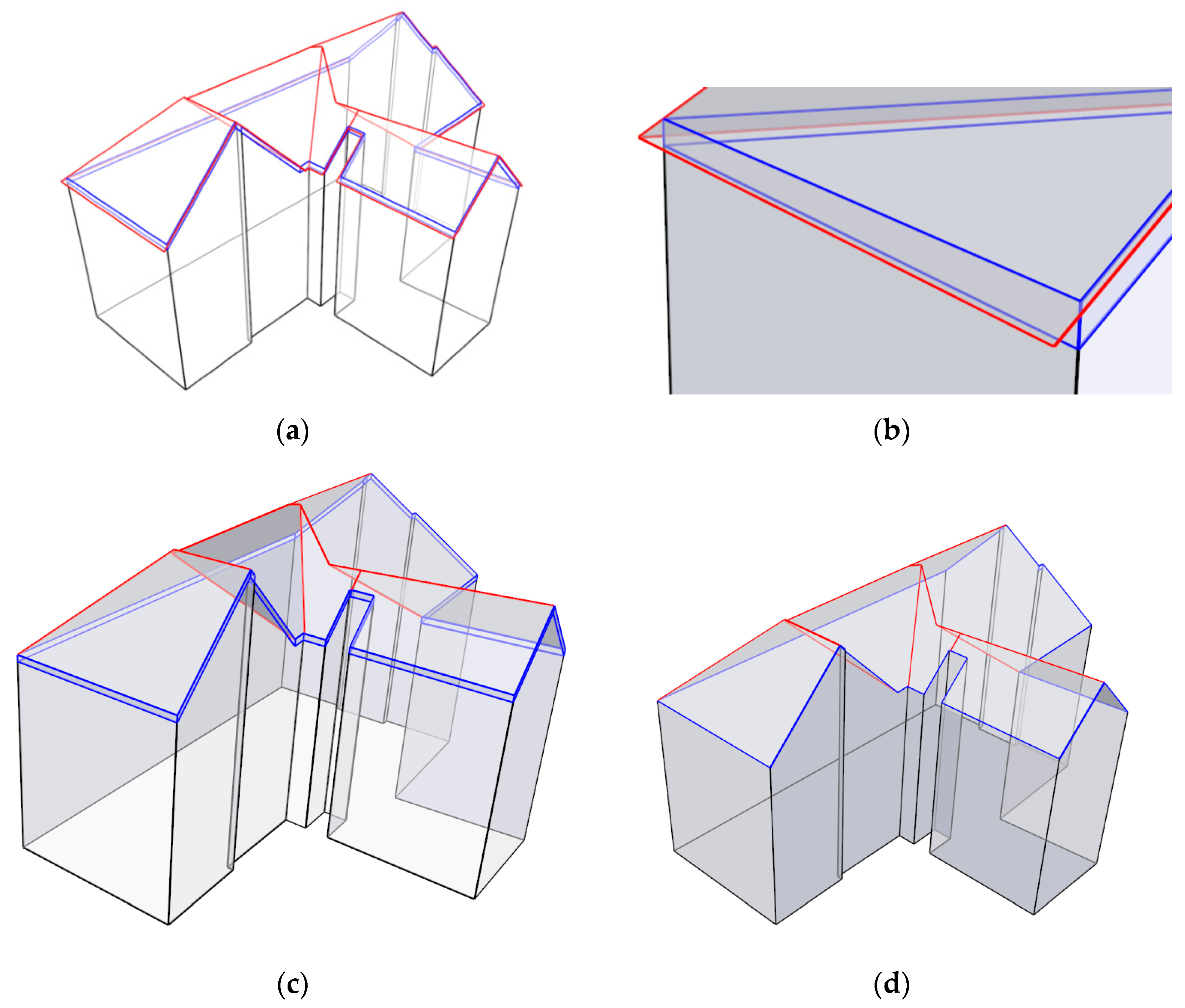
4.5. Geometric Compression of the 3D Volumetric Space
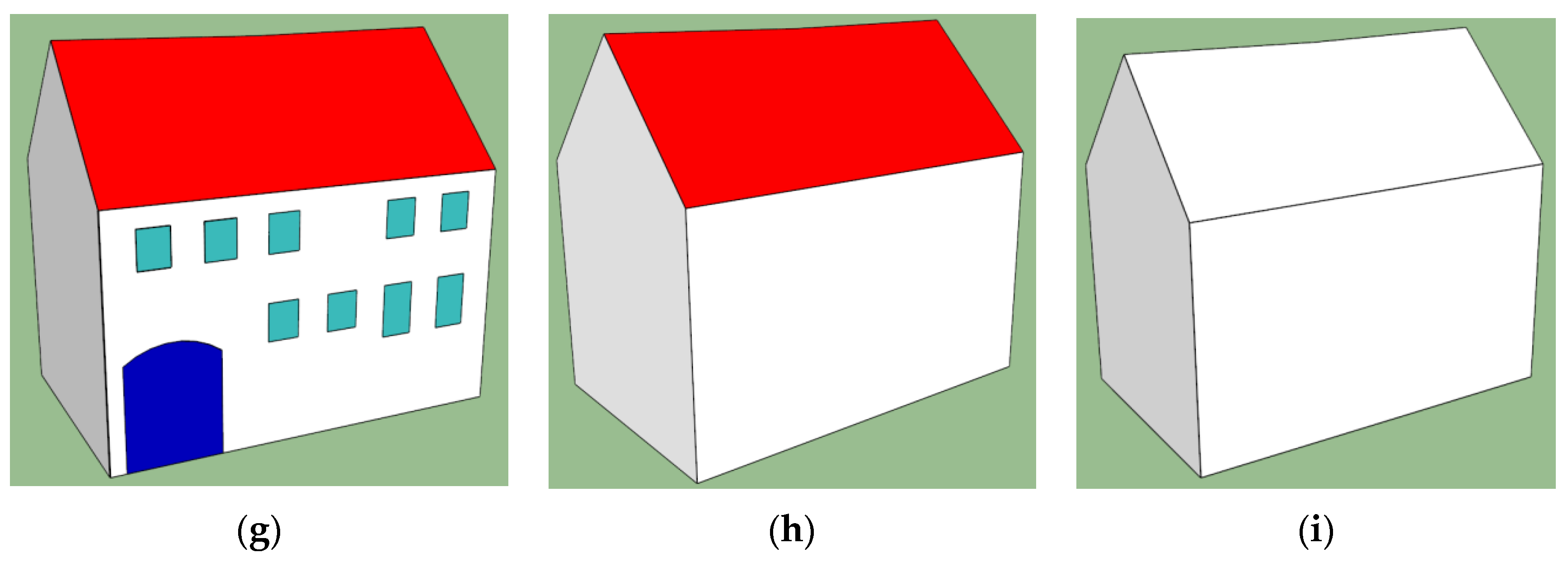
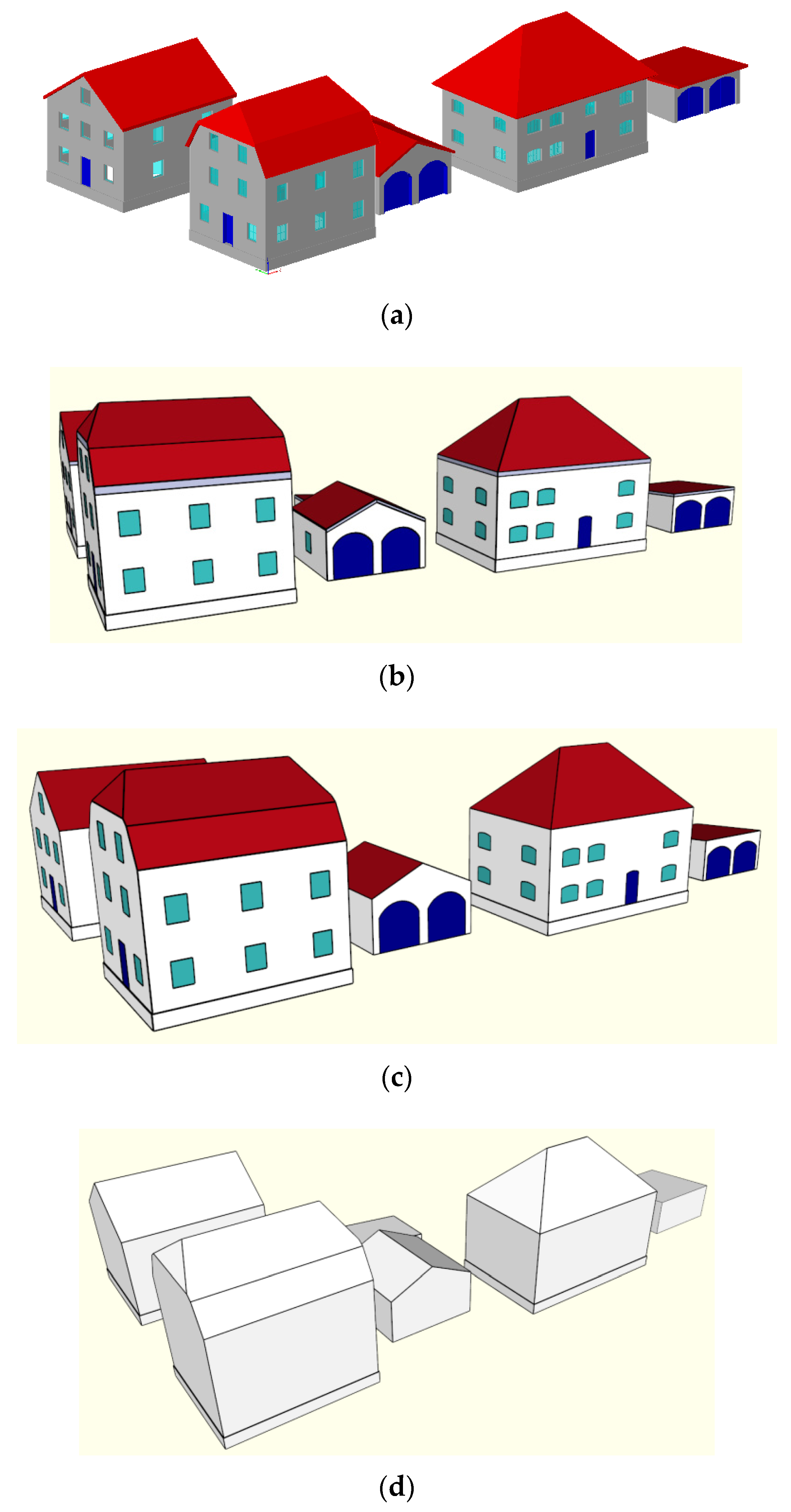
5. Implementation and Experimental Results
6. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cappelle, C.; El Najjar, M.E.; Charpillet, F.; Pomorski, D. Virtual 3D city model for navigation in urban areas. J. Intell. Robotic Syst. 2012, 66, 377–399. [Google Scholar] [CrossRef]
- Van Oosterom, P.; Stoter, J.; Ploeger, H.; Thompson, R.; Karki, S. World-wide inventory of the status of 3D cadastres in 2010 and expectations for 2014. In Proceedings of the FIG Working Week 2011 “Bridging the Gap between Cultures” & 6th National Congress of ONIGT, Marrakech, Morocco, 18–22 May 2011; ONIGT: Rabat, Morocco, 2011; pp. 117–122. [Google Scholar]
- Ying, S.; Li, L.; Guo, R. Building 3D cadastral system based on 2D survey plans with SketchUp. Geo-Spat. Inf. Sci. 2011, 14, 129–136. [Google Scholar] [CrossRef]
- Ying, S.; Guo, R.; Li, L.; Van Oosterom, P.; Stoter, J. Construction of 3D volumetric objects for a 3D cadastral system. Trans. GIS 2015, 19, 758–779. [Google Scholar] [CrossRef]
- D’Silva, M.G.; Speckmann, B.; Westenberg, M.A.; van Hee, K.M. A feasibility study on CityGML for cadastral purposes. Master’s Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2009. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. Error propagation in the computation of volumes in 3D city models with the Monte Carlo method. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 31–39. [Google Scholar] [CrossRef]
- Carrión, D.; Lorenz, A.; Kolbe, T.H. Estimation of the energetic rehabilitation state of buildings for the city of Berlin using a 3D city model represented in CityGML. ISPRS Int. Arch. Photogramm. Remote Sensing Spat. Inf. Sci. 2010, 38, 31–35. [Google Scholar]
- Krüger, A.; Kolbe, T.H. Building analysis for urban energy planning using key indicators on virtual 3D city models—The energy atlas of Berlin. In Proceedings of the ISPRS International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; Volume 39, pp. 145–150.
- Zlatanova, S.; Rahman, A.; Shi, W. Topological models and frameworks for 3D spatial objects. Comput. Geosci. 2004, 30, 419–428. [Google Scholar] [CrossRef] [Green Version]
- Biljecki, F.; Ledoux, H.; Stoter, J.; Zhao, J. Formalisation of the level of detail in 3D city modelling. Comput. Environ. Urban Syst. 2014, 48, 1–15. [Google Scholar] [CrossRef]
- Geiger, A.; Benner, J.; Haefele, K. Generalization of 3D IFC building models. In 3D Geoinformation Science, Lecture Notes in Geoinformation and Cartography; Breunig, M., AI-Doori, M., Butwilowski, E., Kuper, P., Benner, J., Haefele, K., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 19–35. [Google Scholar]
- Fan, H.; Meng, L. A three-step approach of simplifying 3D buildings modeled by CityGML. Int. J. Geogr. Inf. Sci. 2012, 26, 1091–1107. [Google Scholar] [CrossRef]
- He, S.; Moreau, G.; Martin, J.Y. Footprint-based 3D generalization of building groups for virtual city visualization. In Proceedings of the GEO Processing 2012: The Fourth International Conference on Advanced Geographic Information Systems, Applications, and Services, Valencia, Spain, 30 January–4 February 2012; pp. 177–182.
- Buchin, K.; Meulemans, W.; Speckmann, B. A new method for subdivision simplification with applications to urban-area generalization. In Proceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 1–4 November 2011; pp. 261–270.
- Mao, B.; Ban, Y.; Harrie, L. A multiple representation data structure for dynamic visualisation of generalised 3D city models. ISPRS J. Photogramm. Remote Sens. 2011, 66, 198–208. [Google Scholar] [CrossRef]
- Baig, S.U.; Rahman, A.A. A three-step strategy for generalization of 3D building models based on CityGML specifications. GeoJournal 2013, 78, 1013–1020. [Google Scholar] [CrossRef]
- Kada, M. Automatic generalization of 3D building models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 243–248. [Google Scholar]
- Kada, M. Scale-dependent simplification of 3D building models based on cell decomposition and primitive instancing. In Spatial Information Theory; Winter, S., Duckham, M., Kulik, L., Kuipers, B., Eds.; Springer Verlag: Berlin, Germany, 2007; pp. 222–237. [Google Scholar]
- Anders, K.-H. Level of detail generation of 3D building groups by aggregation and typification. In Proceedings of the XXII International Cartographic Conference, La Coruna, Spain, 9–16 August 2005.
- Mayer, H. Scale-spaces for generalization of 3D buildings. Int. J. Geogr. Inf. Sci. 2005, 19, 975–997. [Google Scholar] [CrossRef]
- Mao, B.; Harrie, L. Methodology for the efficient progressive distribution and visualization of 3D building objects. ISPRS Int. J. Geo-Inf. 2016, 5, 185. [Google Scholar] [CrossRef]
- Steuer, H.; Machl, T.; Sindram, M.; Liebel, L.; Kolbe, T. Voluminator—Approximating the volume of 3D buildings to overcome topological errors. In AGILE 2015; Bacao, F., Santos, M.Y., Painho, M., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 343–362. [Google Scholar]
- Thiemann, F. Generalization of 3D building data. ISPRS Int. Arch. Photogramm. Remote Sensing Spat. Inform. Sci. 2002, 34, 286–290. [Google Scholar]
- Thiemann, F.; Sester, M. Segmentation of buildings for 3D-generalisation. In Proceedings of the 7th ICA Workshop on Generalisation and Multiple Representation, Leicester, UK, 20–21 August 2004.
- Thiemann, F.; Sester, M. 3D-symbolization using adaptive templates. In Proceedings of the ISPRS Technical Commission II Symposium, Vienna, Austria, 12–14 July 2006; pp. 49–54.
- Forberg, A. Generalization of 3D building data based on a scale-space approach. In Proceedings of the ISPRS 20th Congress of the IRPRS, Istanbul, Turkey, 12–23 July 2004; Volume 35, pp. 194–199.
- Forberg, A. Generalization of 3D building data based on a scale-space approach. ISPRS J. Photogramm. Remote Sens. 2007, 62, 104–111. [Google Scholar] [CrossRef]
- Van Oosterom, P. Research and development in 3D cadastres. Comput. Environ. Urban Syst. 2013, 40, 1–6. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Czerwinski, A.; Nagel, C. OGC City Geography Markup Language (CityGML) Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, USA, 2012. [Google Scholar]
- Gröger, G.; Plümer, L. CityGML—Interoperable semantic 3D city models. ISPRS J. Photogramm. Remote Sens. 2012, 71, 12–33. [Google Scholar] [CrossRef]
- Kolbe, T.H. BIM, CityGML and related standardization. In Proceedings of the 2012 Digital Landscape Architecture Conference, Bernburg/Dessau, Germany, 31 May–1 June 2012.
- Fan, H.; Meng, L.; Jahnke, M. Generalization of 3D buildings modelled by CityGML. In Advances in GIScience; Sester, M., Bernard, L., Paelke, V., Eds.; Springer Verlag: Berlin, Germany, 2009; pp. 387–405. [Google Scholar]
- Diakite, A.; Damiand, G.; Van Maercke, D. Topological reconstruction of complex 3D buildings and automatic extraction of levels of detail. In Eurographics Workshop on Urban Data Modelling and Visualiz; Besuievsky, G., Tourre, V., Eds.; Eurographics Association: Strasbourg, France, 2014; pp. 25–30. [Google Scholar]
- Jin, F.; Ying, S.; Li, L.; Guo, R. Validation rules and repairing true 3D solids. Geomat. Inform. Sci. Wuhan Univ. 2015, 40, 258–263. [Google Scholar]
- Karki, S.; Thompson, R.; McDougall, K. Data validation in a 3D cadastre. In Developments in 3D GeoInformation Sciences; Neutens, T., Maeyer, P., Eds.; Springer: Berlin Heidelberg, Germany, 2010; pp. 92–122. [Google Scholar]
- Alam, N.; Wagner, D.; Wewetzer, M.; Von Falkenhausen, J.; Coors, V.; Pries, M. Towards automatic validation and healing of CityGML models for geometric and semantic consistency. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2013. [Google Scholar] [CrossRef]
- Wagner, D.; Wewetzer, M.; Bogdahn, J.; Alam, N.; Pries, M.; Coors, V. Geometric semantical consistency validation of CityGML models. In Progress and New Trends in 3D GeoInformation Sciences; Springer: Berlin, Germany, 2013; pp. 171–192. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Input | Output |
|---|---|---|
| Number of Buildings | 6 | 6 |
| Number of Walls | 36 | / |
| Number of Roofs | 16 | / |
| Number of Ground Surfaces | 0 | / |
| Number of Doors | 8 | / |
| Number of Windows | 75 | / |
| Number of Faces | 19365 | 66 |
| Item | Input | Output |
|---|---|---|
| Number of Buildings | 10 | 10 |
| Number of Walls | 65 | / |
| Number of Roofs | 34 | / |
| Number of Ground Surfaces | 0 | / |
| Number of Doors | 8 | / |
| Number of Windows | 34 | / |
| Number of Faces | 3366 | 132 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ying, S.; Guo, R.; Yang, J.; He, B.; Zhao, Z.; Jin, F. 3D Space Shift from CityGML LoD3-Based Multiple Building Elements to a 3D Volumetric Object. ISPRS Int. J. Geo-Inf. 2017, 6, 17. https://doi.org/10.3390/ijgi6010017
Ying S, Guo R, Yang J, He B, Zhao Z, Jin F. 3D Space Shift from CityGML LoD3-Based Multiple Building Elements to a 3D Volumetric Object. ISPRS International Journal of Geo-Information. 2017; 6(1):17. https://doi.org/10.3390/ijgi6010017
Chicago/Turabian StyleYing, Shen, Renzhong Guo, Jie Yang, Biao He, Zhigang Zhao, and Fengzan Jin. 2017. "3D Space Shift from CityGML LoD3-Based Multiple Building Elements to a 3D Volumetric Object" ISPRS International Journal of Geo-Information 6, no. 1: 17. https://doi.org/10.3390/ijgi6010017
APA StyleYing, S., Guo, R., Yang, J., He, B., Zhao, Z., & Jin, F. (2017). 3D Space Shift from CityGML LoD3-Based Multiple Building Elements to a 3D Volumetric Object. ISPRS International Journal of Geo-Information, 6(1), 17. https://doi.org/10.3390/ijgi6010017