
Terrain Extraction in Built-Up Areas from Satellite Stereo-Imagery-Derived Surface Models: A Stratified Object-Based Approach



Abstract
:1. Introduction
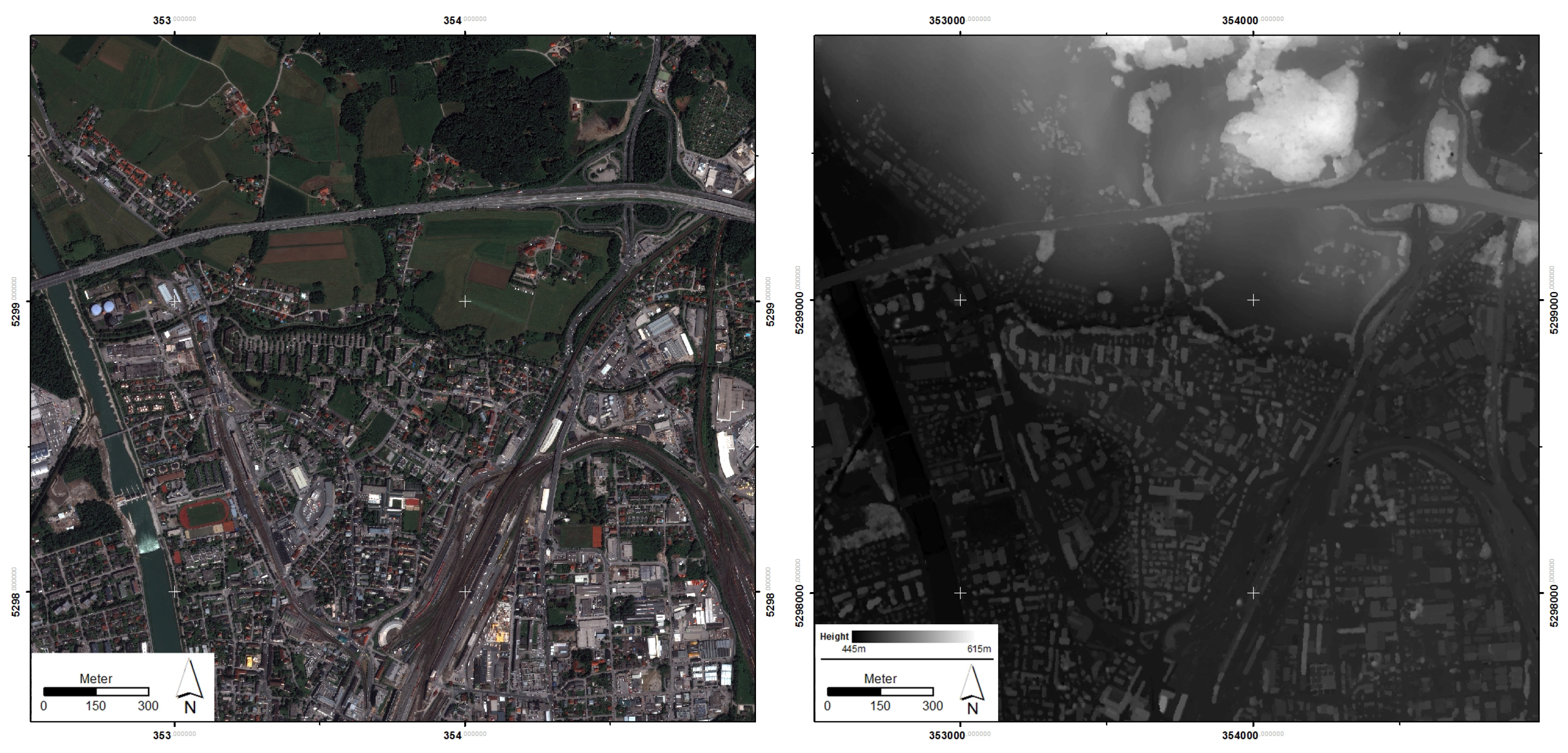
2. Study Area and Data
3. Methodology
- “Field/Pasture”: derived by a low roughness value and a normalized difference vegetation index (NDVI) above zero;
- “Vegetation elevated”: NDVI above zero and a roughness layer standard deviation greater than 0.5;
- “Water bodies”: the spectrally darkest and mostly slopeless objects. Mix-up with shadow avoided by contextual features (no neighboring elevated objects);
- “Bare soil”: classified with a browning reflectance index (BRI) value close to zero [40];
- “Built-up elevated” (buildings and large elevated infrastructural elements): Objects with high slope, low NDVI, and high spectral values were assigned to this class. A comparison of average DSM height values with spatially adjacent objects was performed to ensure that detected built-up objects were above a certain relative (compared to the surrounding) height threshold;
- “Built-up non-elevated”: Objects that exhibited no difference in regard to DSM height to adjacent objects (contextual feature) while having similar spectral properties to the class “Built-up elevated”.
4. Results
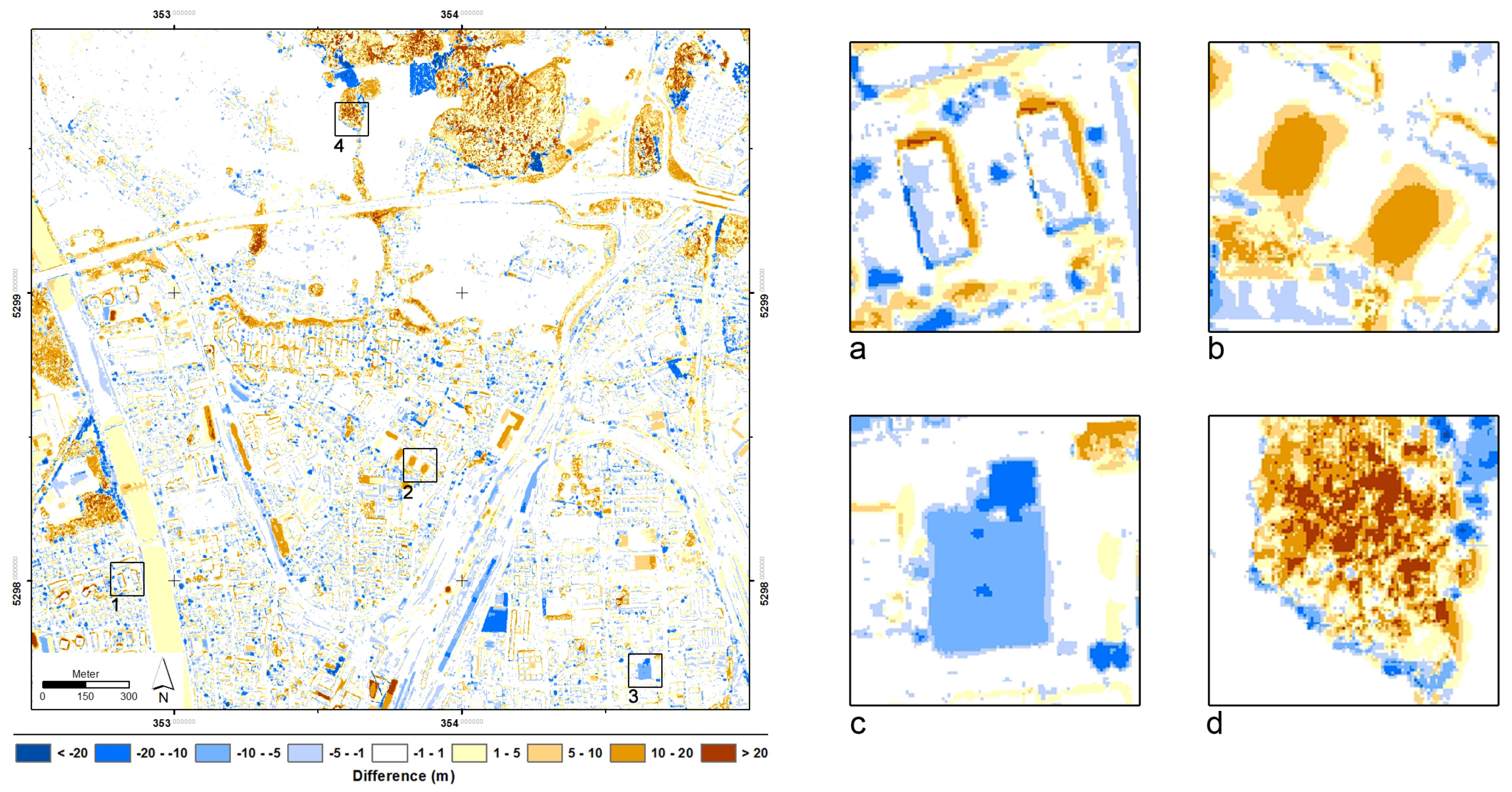
- The water level of the river “Salzach” was higher due to precipitation during the days before data acquisition, and may also be influenced by a newly-constructed hydroelectric power station (built after the LiDAR data acquisition);
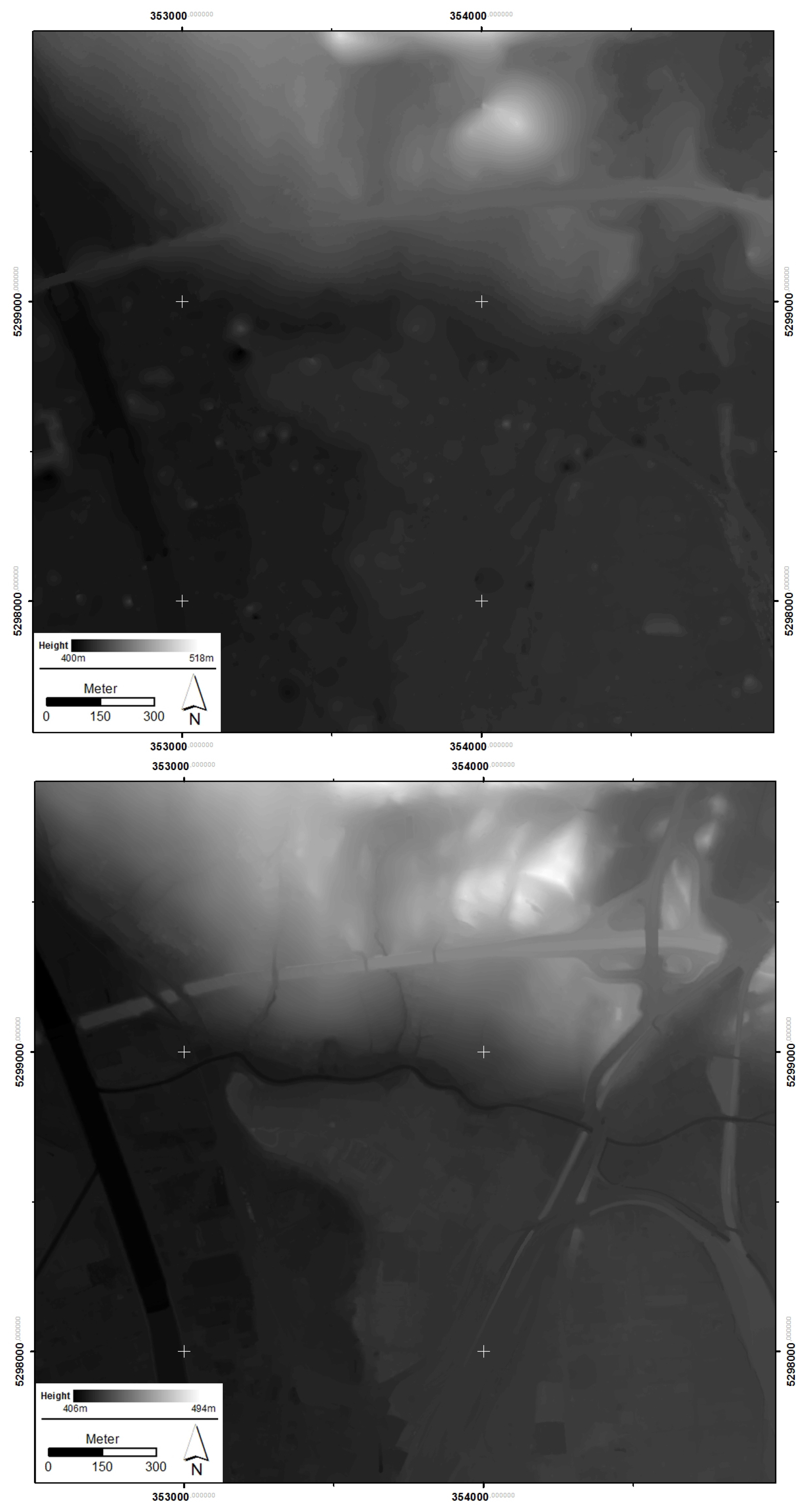
- Small objects (e.g., a small river crossing from east to west in the bottom of Figure 4) are hardly detected in the satellite-derived DSM, and are thus visible in the difference layer;
- In the LiDAR-DEM, man-made bridges have been removed (cf. top vs. bottom of Figure 4). Since the approach in this paper is based on the concept of landforms as discussed by [43], bridges or embankments were not removed from the stereo DEM, and therefore cause additional positive errors in the difference layer, visible in the top of Figure 5;
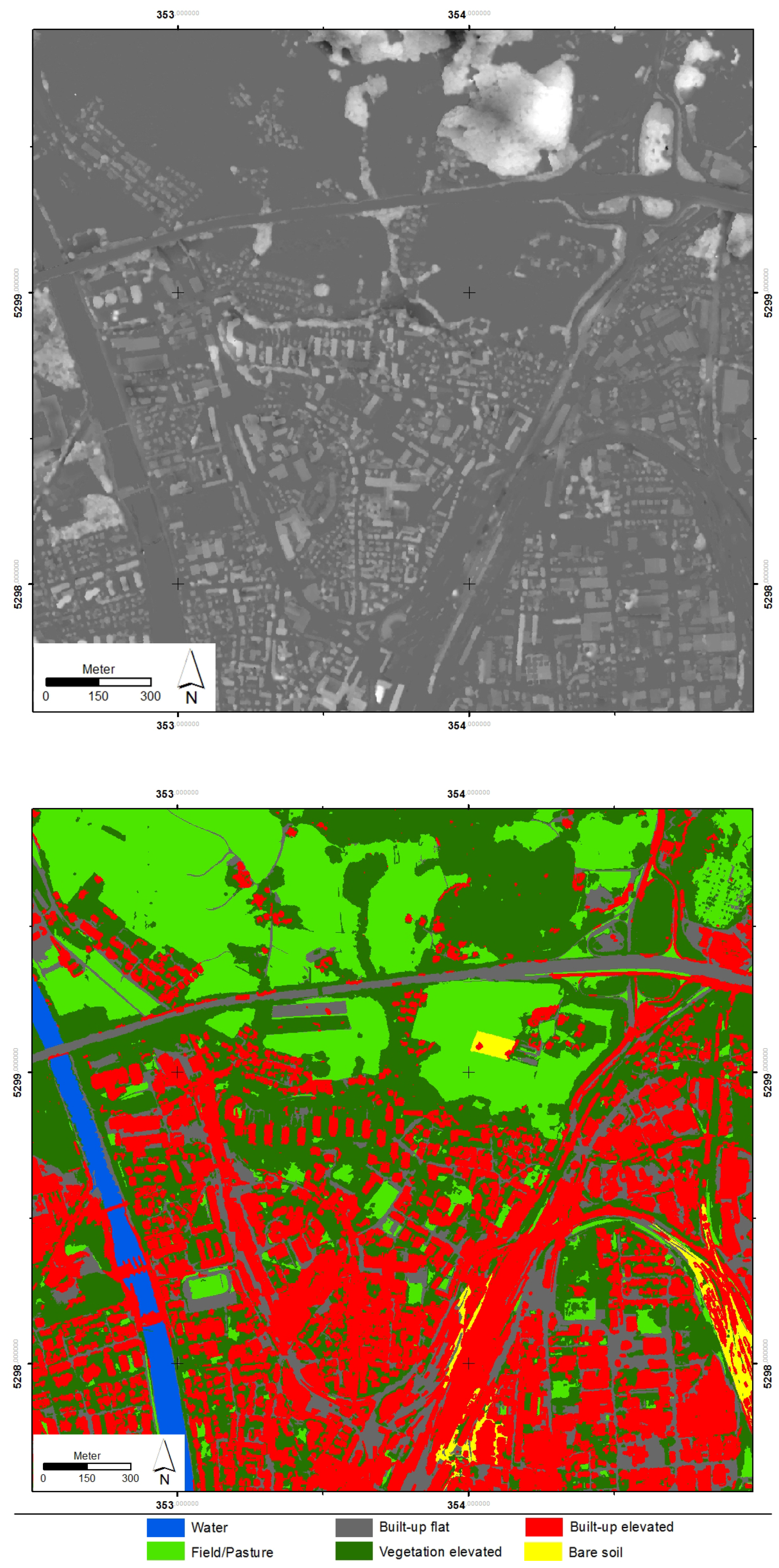
- The RUI classification in the bottom of Figure 5 indicates land cover regions where only a few ground points have been detected; these regions are presumably less reliable and less accurate;
- Densely vegetated areas are prone to errors due to photogrammetric matching issues in the stereo DSM and very sparse or missing detected ground point samples, and thus result in large errors in the stereo DEM. This is especially true for dense vegetation on steep slope surfaces [44]. If the vegetated area covers domes or similar relief structures (hilly areas), not enough ground point samples can be found to accurately estimate the underlying surface.
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Florinsky, I.V. Digital Terrain Analysis in Soil Science and Geology, 2nd ed.; Academic Press: New York, NY, USA, 2016. [Google Scholar]
- Li, Z.; Zhu, C.; Gold, C. Digital Terrain Modeling: Principles and Methodology; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Nelson, A.; Reuter, H.; Gessler, P. DEM production and methods. Dev. Soil Sci. 2009, 33, 65–85. [Google Scholar]
- Dewitte, O.; Jasselette, J.C.; Cornette, Y.; van dem Eeckhaut, M.; Collignon, A.; Poesen, J.; Demoulin, A. Tracking landslide displacements by multi-temporal DTMs: A combined aerial stereophotogrammetric and LIDAR approach in western Belgium. Eng. Geol. 2008, 99, 11–22. [Google Scholar] [CrossRef]
- Razak, K.A.; Santangelo, M.; van Westen, C.J.; Straatsma, M.W.; de Jong, S.M. Generating an optimal DTM from airborne laser scanning data for landslide mapping in a tropical forest environment. Geomorphology 2013, 190, 112–125. [Google Scholar] [CrossRef]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Segmentation optimization and stratified object-based analysis for semi-automated geomorphological mapping. Remote Sens. Environ. 2011, 115, 2976–2985. [Google Scholar] [CrossRef]
- Eisank, C.; Smith, M.; Hillier, J. Assessment of multiresolution segmentation for delimiting drumlins in digital elevation models. Geomorphology 2014, 214, 452–464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Biljecki, F.; Arroyo Ohori, K.; Ledoux, H.; Peters, R.; Stoter, J. Population estimation using a 3D city model: A multi-scale country-wide study in the Netherlands. PLoS ONE 2016, 11, e0156808. [Google Scholar] [CrossRef] [PubMed]
- Tomás, L.; Fonseca, L.; Almeida, C.; Leonardi, F.; Pereira, M. Urban population estimation based on residential buildings volume using IKONOS-2 images and lidar data. Int. J. Remote Sens. 2016, 37, 1–28. [Google Scholar] [CrossRef]
- Wu, S.; Qiu, X.; Wang, L. Population estimation methods in GIS and remote sensing: A review. GISci. Remote Sens. 2005, 42, 80–96. [Google Scholar] [CrossRef]
- Deilami, K.; Hashim, M. Very high resolution optical satellites for DEM generation: A review. Eur. J. Sci. Res. 2011, 49, 542–554. [Google Scholar]
- Li, J.; Heap, A.D. A review of comparative studies of spatial interpolation methods in environmental sciences: Performance and impact factors. Ecol. Inform. 2011, 6, 228–241. [Google Scholar] [CrossRef]
- Li, J.; Heap, A.D. Spatial interpolation methods applied in the environmental sciences: A review. Environ. Model. 2014, 53, 173–189. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Ismail, Z.; Jaafar, J. DEM derived from photogrammetric generated DSM using morphological filter. In Proceedings of the 2013 IEEE 4th Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 19–20 August 2013; pp. 103–106.
- Bagheri, H.; Sadeghian, S.; Sadjadi, S.Y. The assessment of using an intelligent algorithm for the interpolation of elevation in the DTM generation. Photogramm. Fernerkund. Geoinform. 2014, 3, 197–208. [Google Scholar]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Mongus, D.; Lukač, N.; Žalik, B. Ground and building extraction from LiDAR data based on differential morphological profiles and locally fitted surfaces. ISPRS J. Photogramm. Remote Sens. 2014, 93, 145–156. [Google Scholar] [CrossRef]
- Piltz, B.; Bayer, S.; Poznanska, A.M. Volume based DTM generation from very high resolution photogrammetric DSMs. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2016, 41, 83–90. [Google Scholar] [CrossRef]
- Greiwe, A.; Gehrke, R.; Spreckels, V.; Schlienkamp, A. Ableitung eines Geländemodells (Haldenkörper) aus multispektralen UAS-Bilddaten. In DGPF Jahrestagung 2014 (Publikationen der DGPF Band 23); Seyfert, E., Ed.; Deutsche Gesellschaft für Photogrammetrie, Fernerkundung und Geoinformation (DGPF) e.V.: München, Germany, 2014; pp. 1–10. [Google Scholar]
- Perko, R.; Raggam, H.; Gutjahr, K.H.; Schardt, M. Advanced DTM generation from very high resolution satellite stereo images. ISPRS Ann. Photogramm. Remote Sens. Spat. Inform. Sci. 2015, 2, 165–172. [Google Scholar] [CrossRef]
- Beumier, C.; Idrissa, M. Deriving a DTM from a DSM by uniform regions and context. EARSel Proc. 2015, 14, 16–24. [Google Scholar] [CrossRef]
- Beumier, C.; Idrissa, M. Digital terrain models derived from digital surface model uniform regions in urban areas. Int. J. Remote Sens. 2016, 37, 3477–3493. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Pfeifer, N.; Mandlburger, G.; Lugmayr, A. Experimental evaluation of ALS point cloud ground extraction tools over different terrain slope and land-cover types. Int. J. Remote Sens. 2014, 35, 4673–4697. [Google Scholar] [CrossRef]
- Morsy, S.; Shaker, A.; El-Rabbany, A.; LaRocque, P.E. Airborne multispectral lidar data for land-cover classification and land/water mapping using different spectral indexes. ISPRS Ann. Photogramm. Remote Sens. Spat. Inform. Sci. 2016, 3, 217–224. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Danson, F.M. Estimating biomass carbon stocks for a Mediterranean forest in central Spain using LiDAR height and intensity data. Remote Sens. Environ. 2010, 114, 816–830. [Google Scholar] [CrossRef]
- Aguilar, M.Á.; Del Mar Saldaña, M.; Aguilar, F.J. Generation and quality assessment of stereo-extracted DSM from GeoEye-1 and WorldView-2 Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1259–1271. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.; van der Meer, F.; va der Werff, H.; van Coillie, F.; et al. Geographic object-based image analysis: Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Tiede, D. A new geospatial overlay method for the analysis and visualization of spatial change patterns using object-oriented data modelling concepts. Cartogr. Geogr. Inform. Sci. 2014, 41, 227–234. [Google Scholar] [CrossRef] [PubMed]
- Lohmann, P. Segmentation and filtering of laser scanner digital surface models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2002, 34, 311–316. [Google Scholar]
- Topan, H.; Cam, A.; Özendi, M.; Oruç, M.; Jacobsen, K.; Taşkanat, T. Pléiades project: Assessment of georeferencing accuracy, image quality, pansharpening performance and DSM/DTM quality. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2016, 41, 503–510. [Google Scholar] [CrossRef]
- Krauß, T.; d’Angelo, P.; Schneider, M.; Gstaiger, V. The fully automatic optical processing system CATENA at DLR. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2013, XL-1/W1, 177–181. [Google Scholar] [CrossRef]
- Tiede, D.; Lang, S.; Albrecht, F.; Hölbling, D. Object-based class modeling for cadastre-constrained delineation of geo-objects. Photogramm. Eng. Remote Sens. 2010, 76, 193–202. [Google Scholar] [CrossRef]
- Luethje, F.; Tiede, D.; Eisank, C. Object-based DTM generation from VHR stereo imagery derived DSM data sets. South-East. Eur. J. Earth Observ. Geomat. 2014, 3, 109–114. [Google Scholar]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Proceedings of the 2000 XII Angewandte Geographische Informationsverarbeitung, Salzburg, Austria, 5–7 July 2000.
- Trevisani, S.; Rocca, M. MAD: Robust image texture analysis for applications in high resolution geomorphometry. Comput. Geosci. 2015, 81, 78–92. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Smith, M.J.; Riccomini, C. Multiscale analysis of topographic surface roughness in the Midland Valley, Scotland. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1200–1213. [Google Scholar] [CrossRef]
- Smith, M.W. Roughness in the earth-sciences. Earth Sci. Rev. 2014, 136, 202–225. [Google Scholar] [CrossRef]
- Merzlyak, M.N.; Gitelson, A.A.; Chivkunova, O.B.; Solovchenko, A.E.; Pogosyan, S.I. Application of reflectance spectroscopy for analysis of higher plant pigments. Russ. J. Plant Physiol. 2003, 50, 704–710. [Google Scholar] [CrossRef]
- Chaplot, V.; Darboux, F.; Bourennane, H.; Leguédois, S.; Silvera, N.; Phachomphon, K. Accuracy of interpolation techniques for the derivation of digital elevation models in relation to landform types and data density. Geomorphology 2006, 77, 126–141. [Google Scholar] [CrossRef]
- Poli, D.; Remondino, F.; Angiuli, E.; Agugiaro, G. Radiometric and geometric evaluation of GeoEye-1, WorldView-2 and Pléiades-1A stereo images for 3D information extraction. ISPRS J. Photogramm. Remote Sens. 2015, 100, 35–47. [Google Scholar] [CrossRef]
- Evans, I.S. Geomorphometry and landform mapping: What is a landform? Geomorphology 2012, 137, 94–106. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Höhle, J.; Höhle, M. Accuracy assessment of digital elevation models by means of robust statistical methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Filtering of airborne laser scanner data based on segmented point clouds. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2005, 36, 66–71. [Google Scholar]
- Baraldi, A.; Durieux, L.; Simonetti, D.; Conchedda, G.; Holecz, F.; Blonda, P. Automatic spectral-rule-based preliminary classification of radiometrically calibrated SPOT-4/-5/IRS, AVHRR/MSG, AATSR, IKONOS/QuickBird/OrbView/GeoEye, and DMC/SPOT-1/-2 imagery—Part I: System design and implementation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1299–1325. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class Name | Parameters and Sampling Method | RUI Value | |
|---|---|---|---|
| Fields/Pasture | Surface roughness and NDVI | Land cover domain true terrain | 100 |
| Vegetation elevated | Surface roughness and NDVI | No ground point sampling in land cover domain, but search for clearings | 0 |
| Clearing | Object with height difference (threshold) within vegetation elevated | Local minima detection to retrieve ground point samples | |
| Water | Slope and minimum-value detection in NIR | Land cover domain true terrain | 100 |
| Built-up elevated | Slope, brightness and height difference to adjacent objects | Local minima detection to retrieve ground point samples between elevated objects | |
| Built-up non-evelated | Brightness and no height difference to adjacent objects | Land cover domain true terrain | 100 |
| Bare soil | BRI | Land cover domain true terrain | 100 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luethje, F.; Tiede, D.; Eisank, C. Terrain Extraction in Built-Up Areas from Satellite Stereo-Imagery-Derived Surface Models: A Stratified Object-Based Approach. ISPRS Int. J. Geo-Inf. 2017, 6, 9. https://doi.org/10.3390/ijgi6010009
Luethje F, Tiede D, Eisank C. Terrain Extraction in Built-Up Areas from Satellite Stereo-Imagery-Derived Surface Models: A Stratified Object-Based Approach. ISPRS International Journal of Geo-Information. 2017; 6(1):9. https://doi.org/10.3390/ijgi6010009
Chicago/Turabian StyleLuethje, Fritjof, Dirk Tiede, and Clemens Eisank. 2017. "Terrain Extraction in Built-Up Areas from Satellite Stereo-Imagery-Derived Surface Models: A Stratified Object-Based Approach" ISPRS International Journal of Geo-Information 6, no. 1: 9. https://doi.org/10.3390/ijgi6010009
APA StyleLuethje, F., Tiede, D., & Eisank, C. (2017). Terrain Extraction in Built-Up Areas from Satellite Stereo-Imagery-Derived Surface Models: A Stratified Object-Based Approach. ISPRS International Journal of Geo-Information, 6(1), 9. https://doi.org/10.3390/ijgi6010009