Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models


Abstract
:1. Introduction
2. Related Work
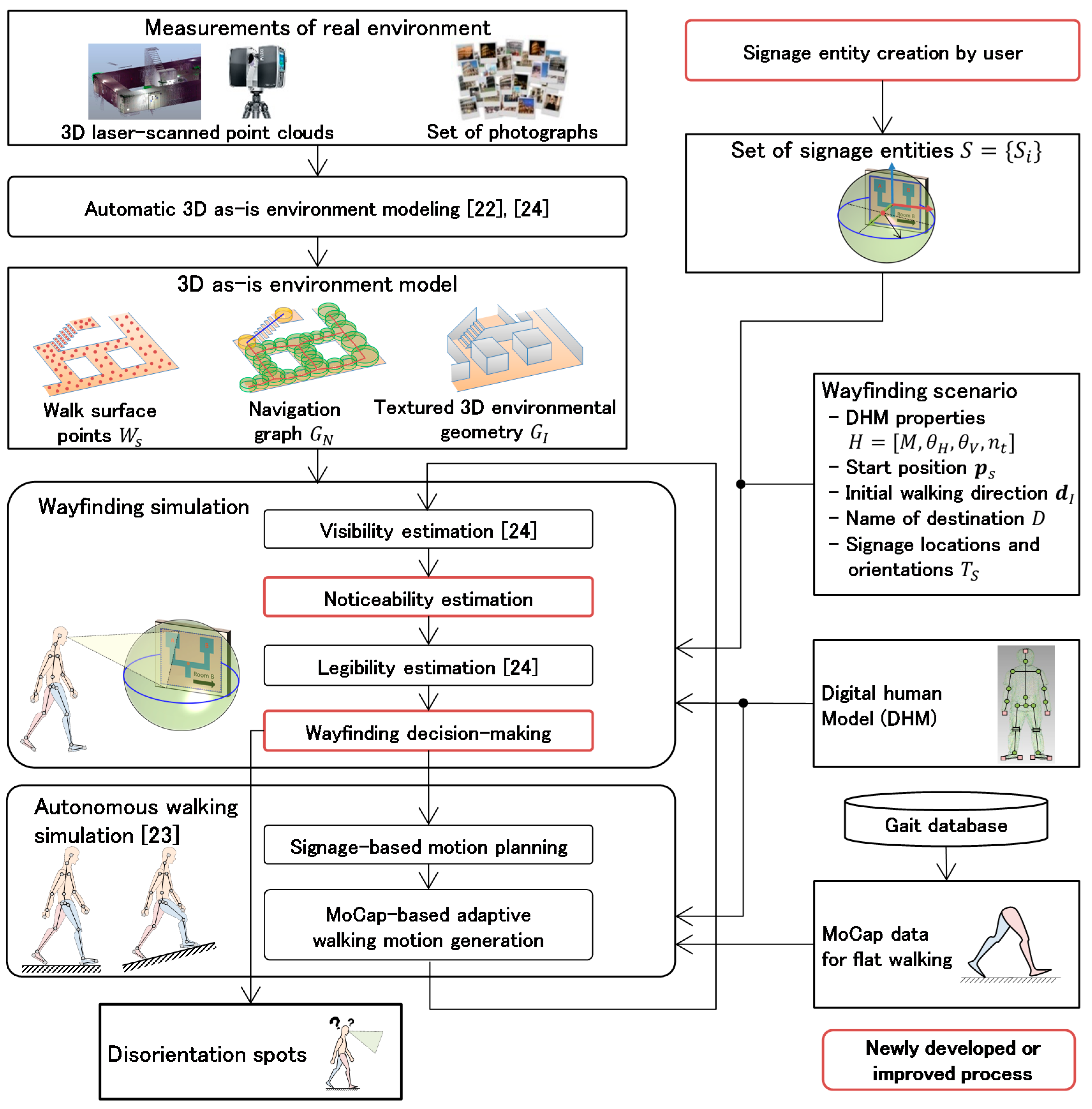
- DHM can make a decision based on the surrounding signage perceived by its imitated visual perception in consideration of signage location, continuity, visibility, noticeability, and legibility.
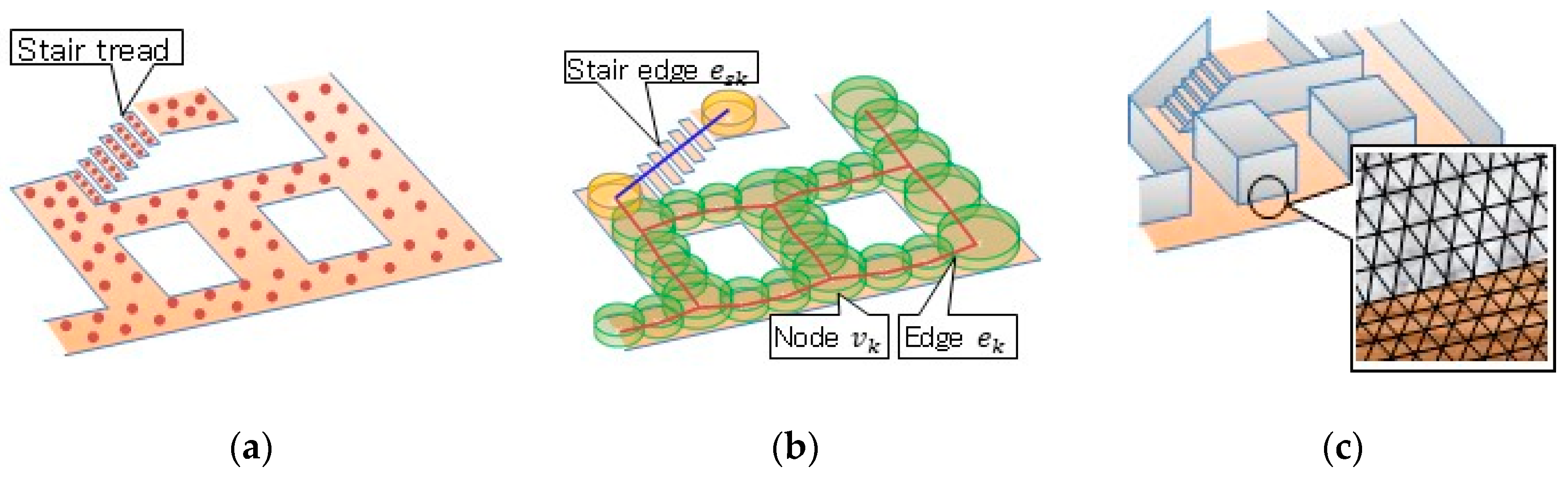
- As-is environment model including detailed environmental geometry and realistic textures, can be generated automatically using 3D laser-scanning and SfM.
- Proposed system can simulate the wayfinding of the DHM by discriminating among four types of signage, namely, positional, directional, routing, and identification signage.
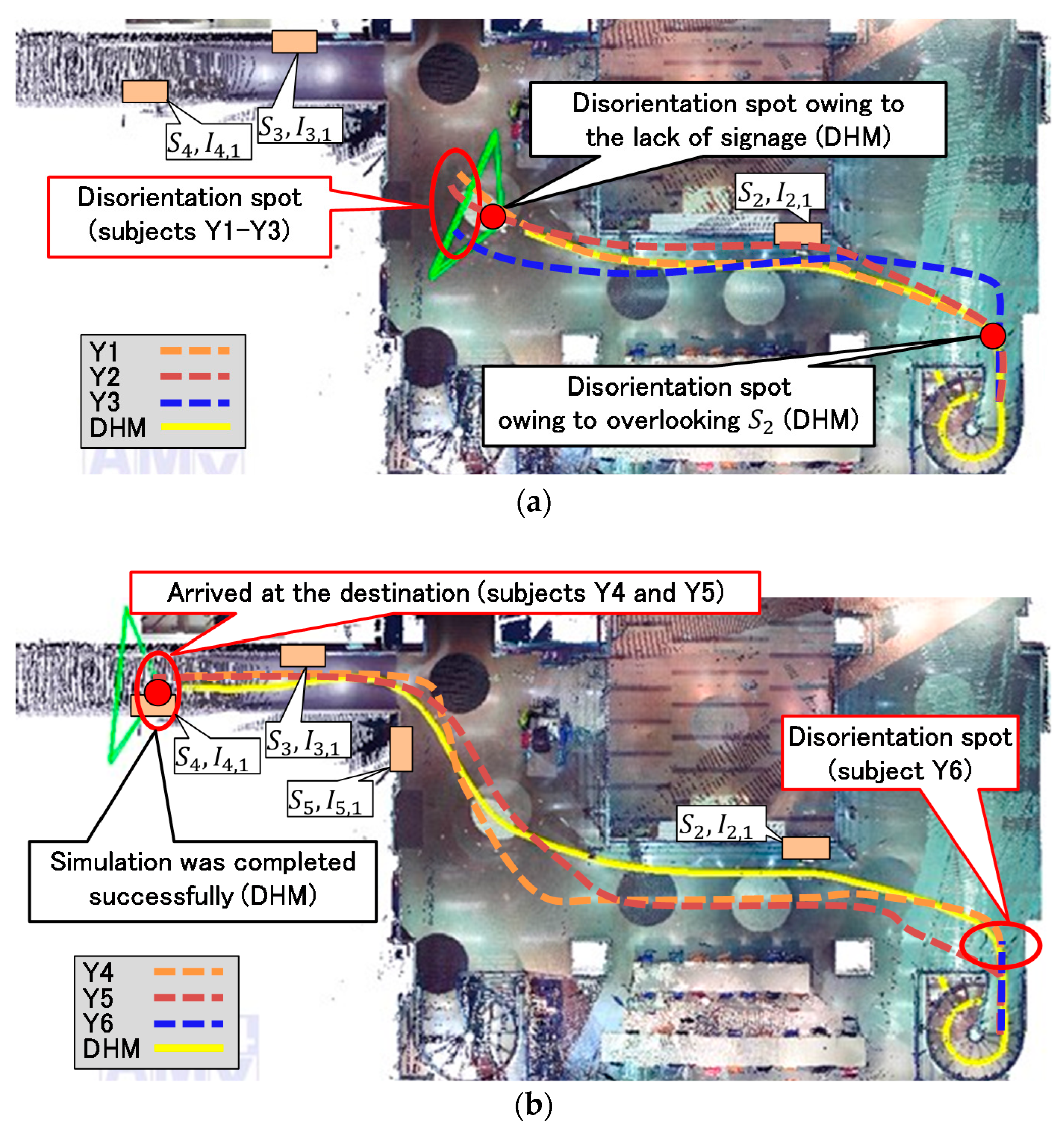
- Proposed system is validated through a comparison of disorientation spots between simulations and measurements obtained from young subjects.
3. Automatic 3D As-Is Environment Modeling
4. Creation of Signage Entity
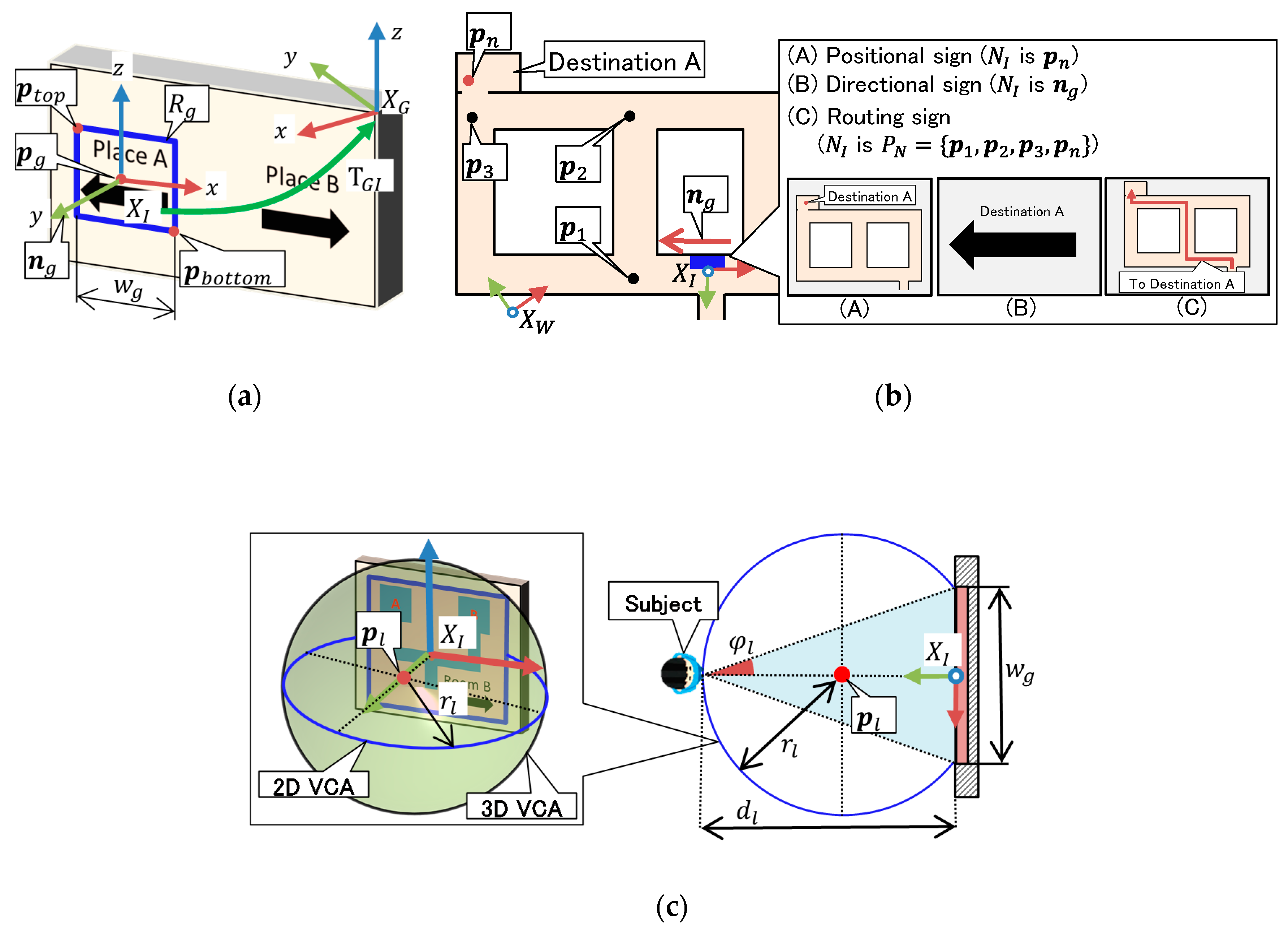
4.1. Geometric Property
4.2. Navigation Property
4.3. Legibility Property
5. System for Evaluation of Ease of Wayfinding
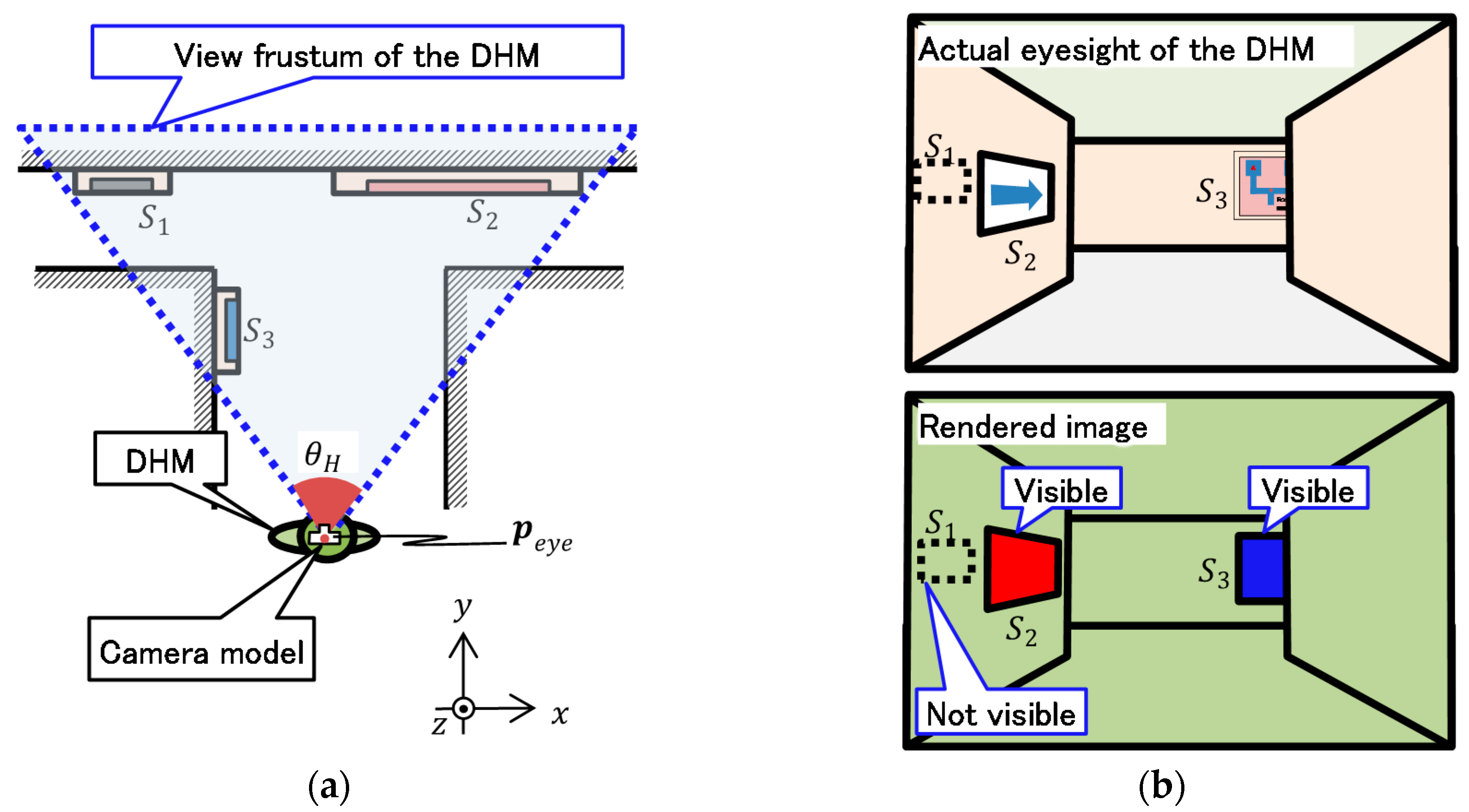
5.1. Signage Perception Based on Imitated Visual Perception
5.1.1. Signage Visibility Estimation
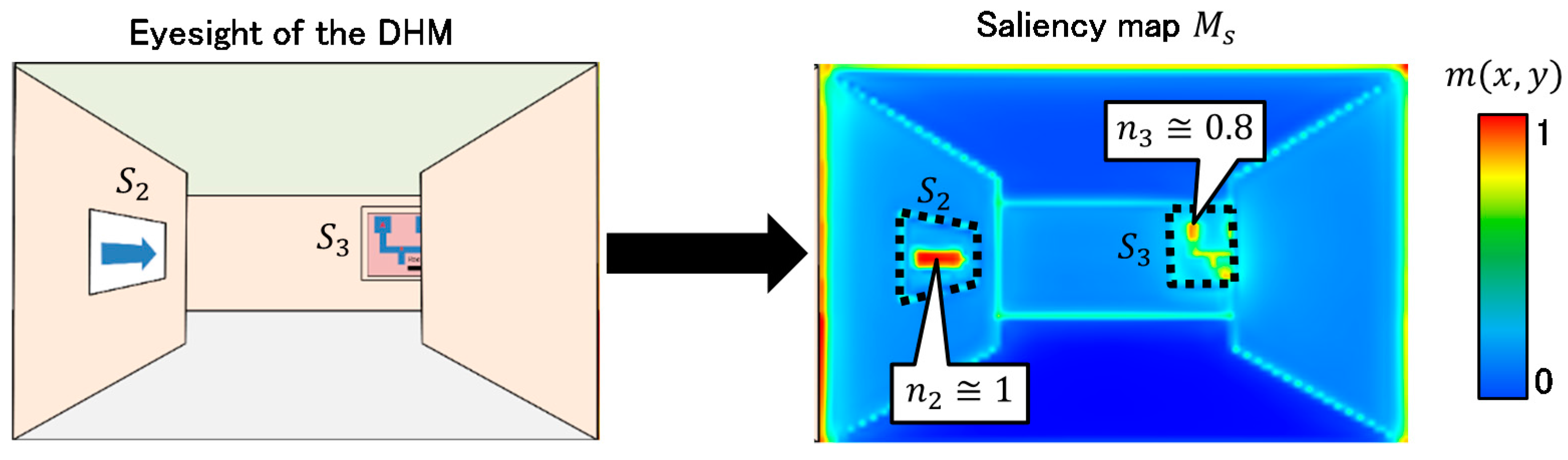
5.1.2. Signage Noticeability Estimation
5.1.3. Signage Legibility Estimation
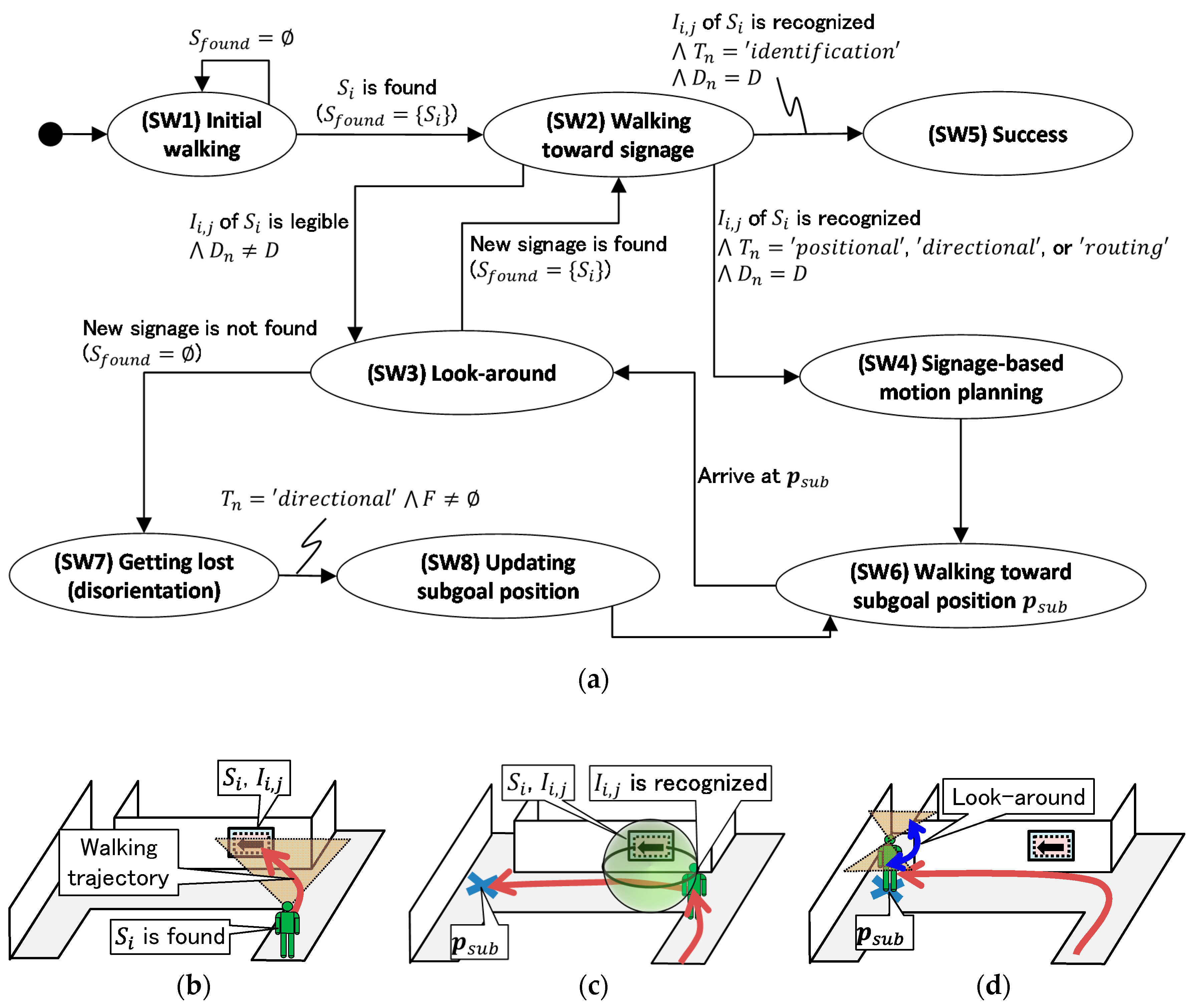
5.2. Wayfinding Decision-Making Based on Signage Perception
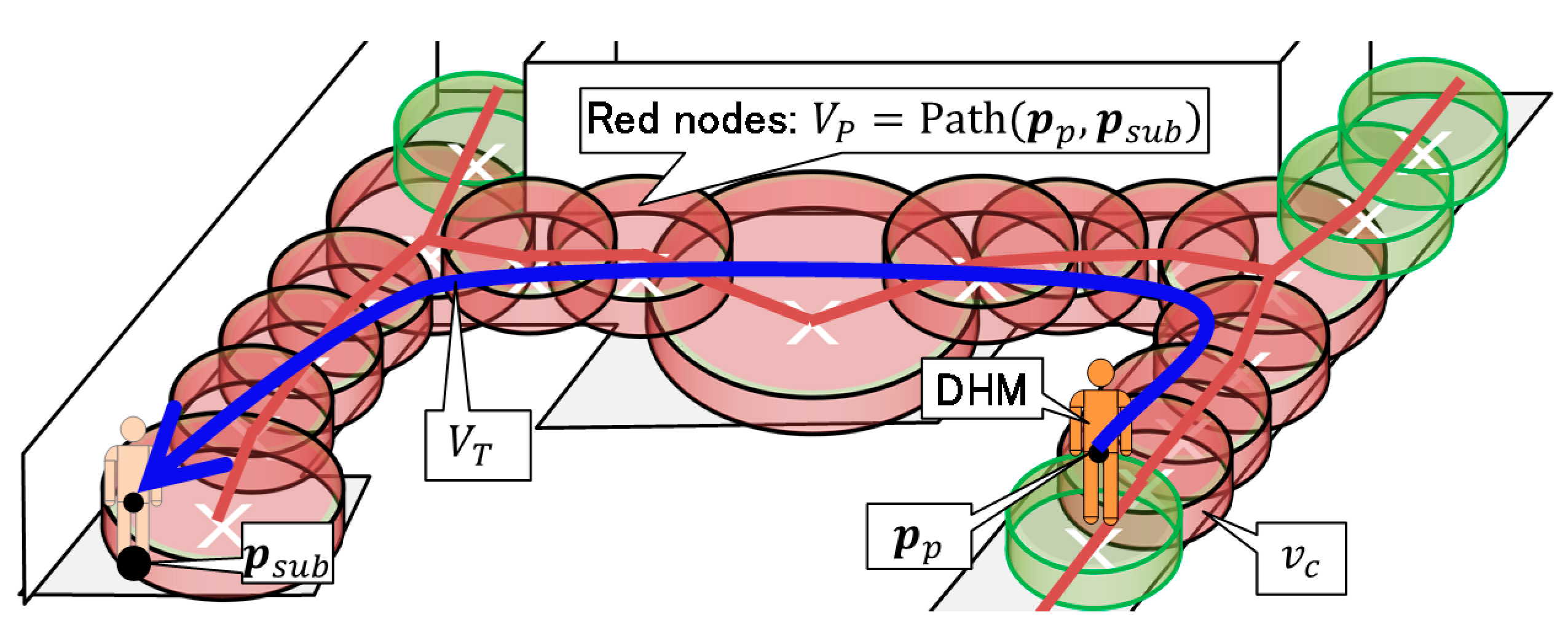
5.3. Signage-Based Motion Planning
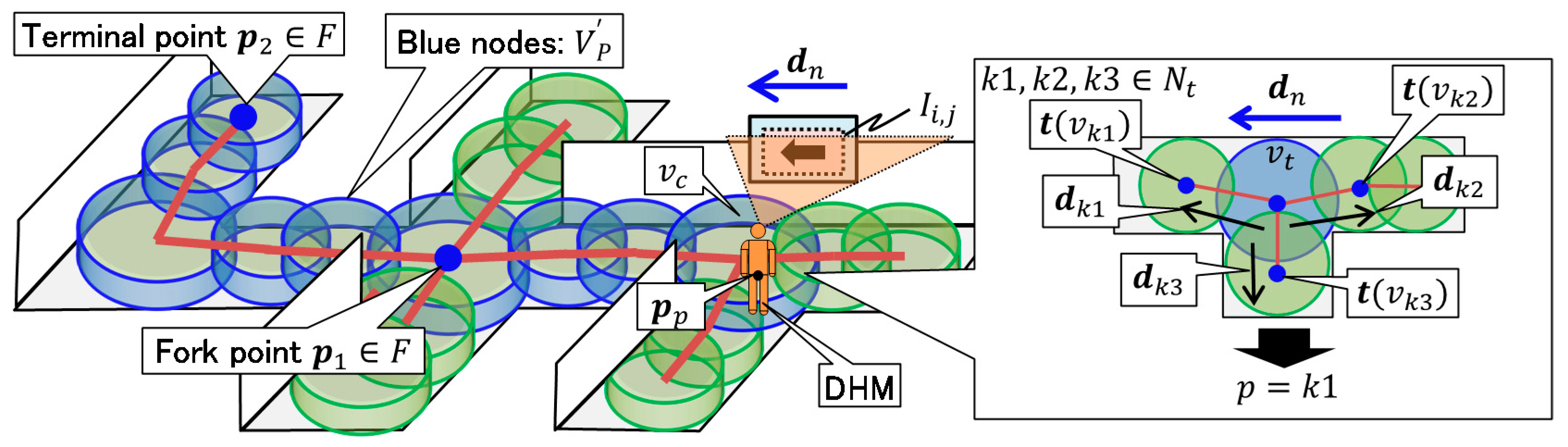
5.3.1. Updating Subgoal Position of DHM
- (1)
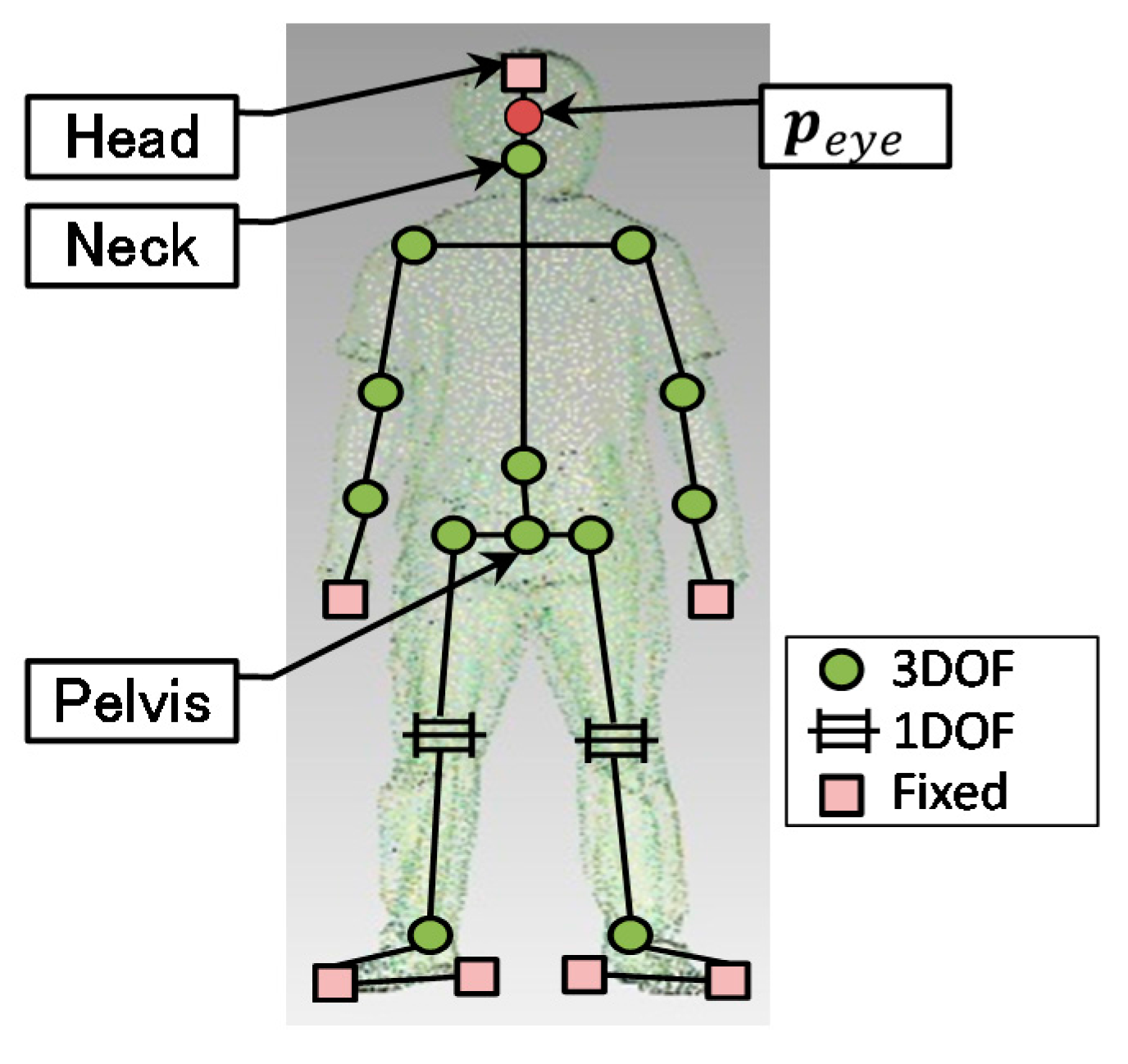
- A graph node just under the pelvis position of the DHM is extracted from the navigation graph . Then, is inserted into a set of graph nodes , where represents graph nodes on a feasible walking path when the DHM walks in accordance with the next walking direction indicated by .
- (2)
- and of are assigned to the variables and , respectively.
- (3)
- A graph node located in the direction of is extracted using the following equation:where represents a set of indices of graph node () connected to by a graph edge. Using this equation, is determined as a graph node with the minimum angle difference between and a graph edge connecting and .
- (4)
- If , is inserted into and and are assigned to and , respectively.
- (5)
- If , is pushed into because is considered a center position at the fork way or at the terminal of the walkway.
- (6)
- Steps (3)–(5) are repeated, until , i.e., until a graph node representing the terminal of the walkway is found.
5.3.2. Walking Path Selection and Walking Trajectory Generation
5.4. MoCap-Based Adaptive Walking Motion Generation
6. Results and Validations
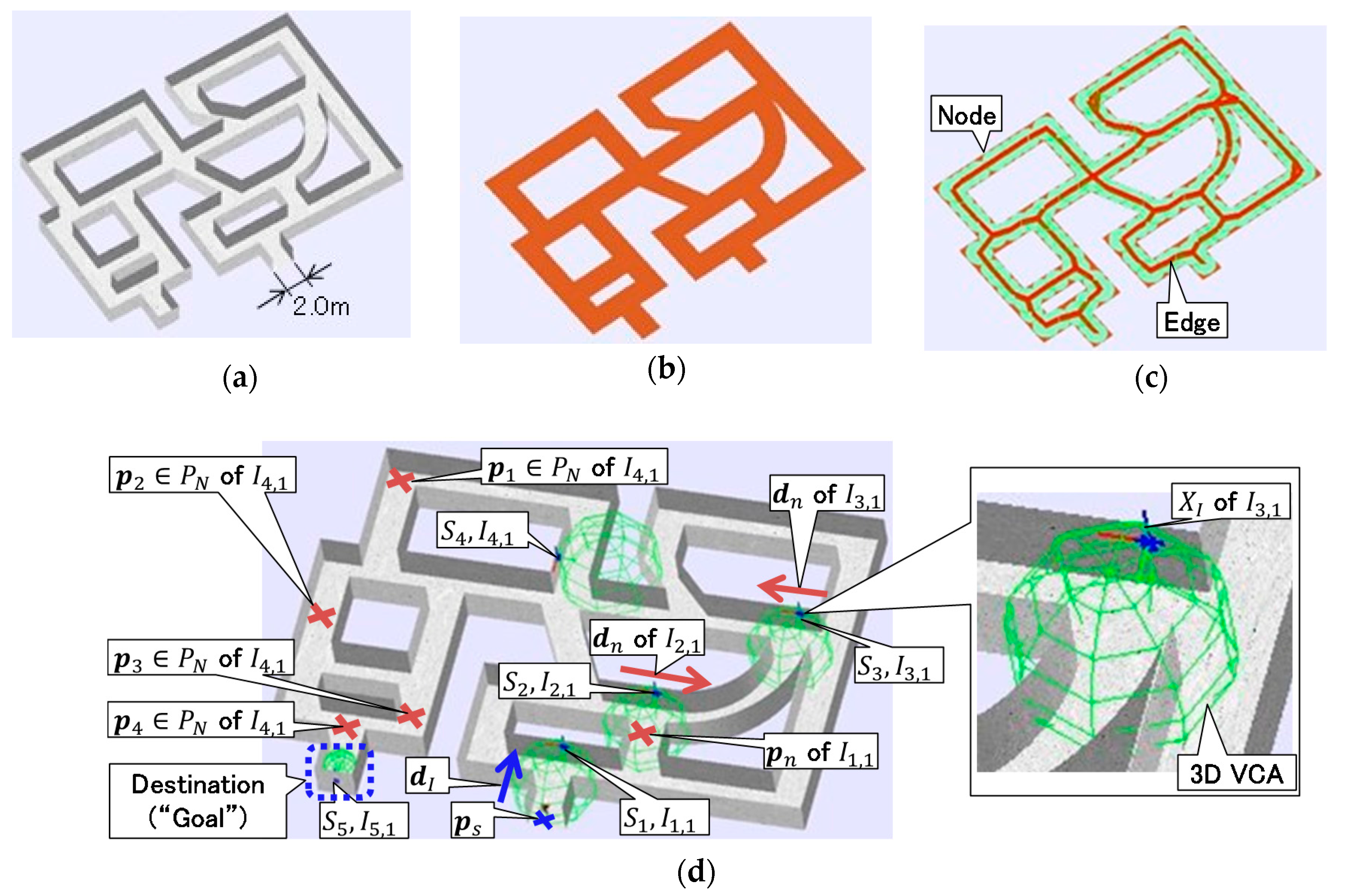
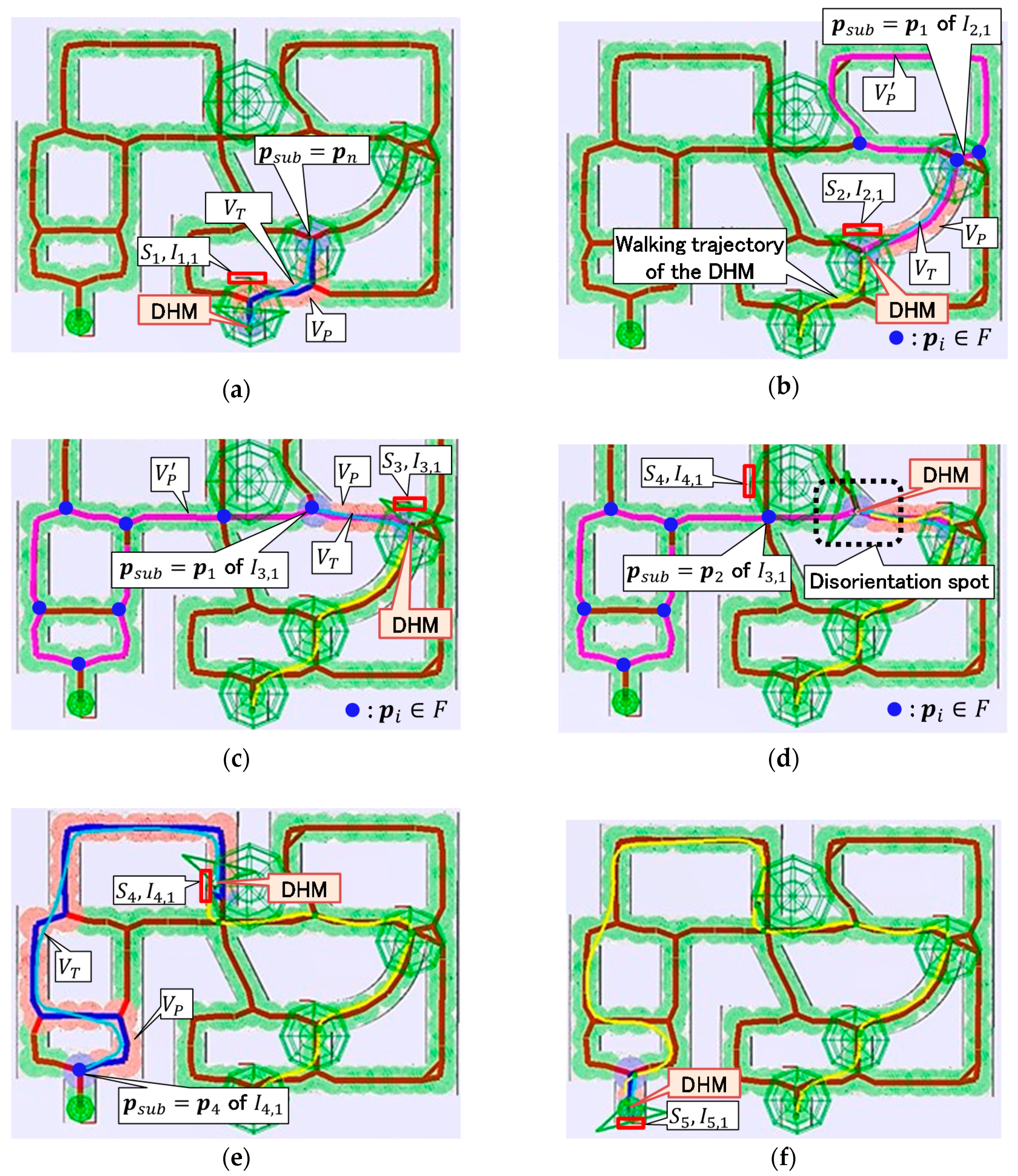
6.1. Evaluation of Ease of Wayfinding in Virtual Maze
- The proposed system could detect disorientation spots resulting from the lack of signage or poor location of signage in the environment model.
- The proposed system could simulate the wayfinding of the DHM by discriminating among four types of signage, namely, positional, directional, routing, and identification.
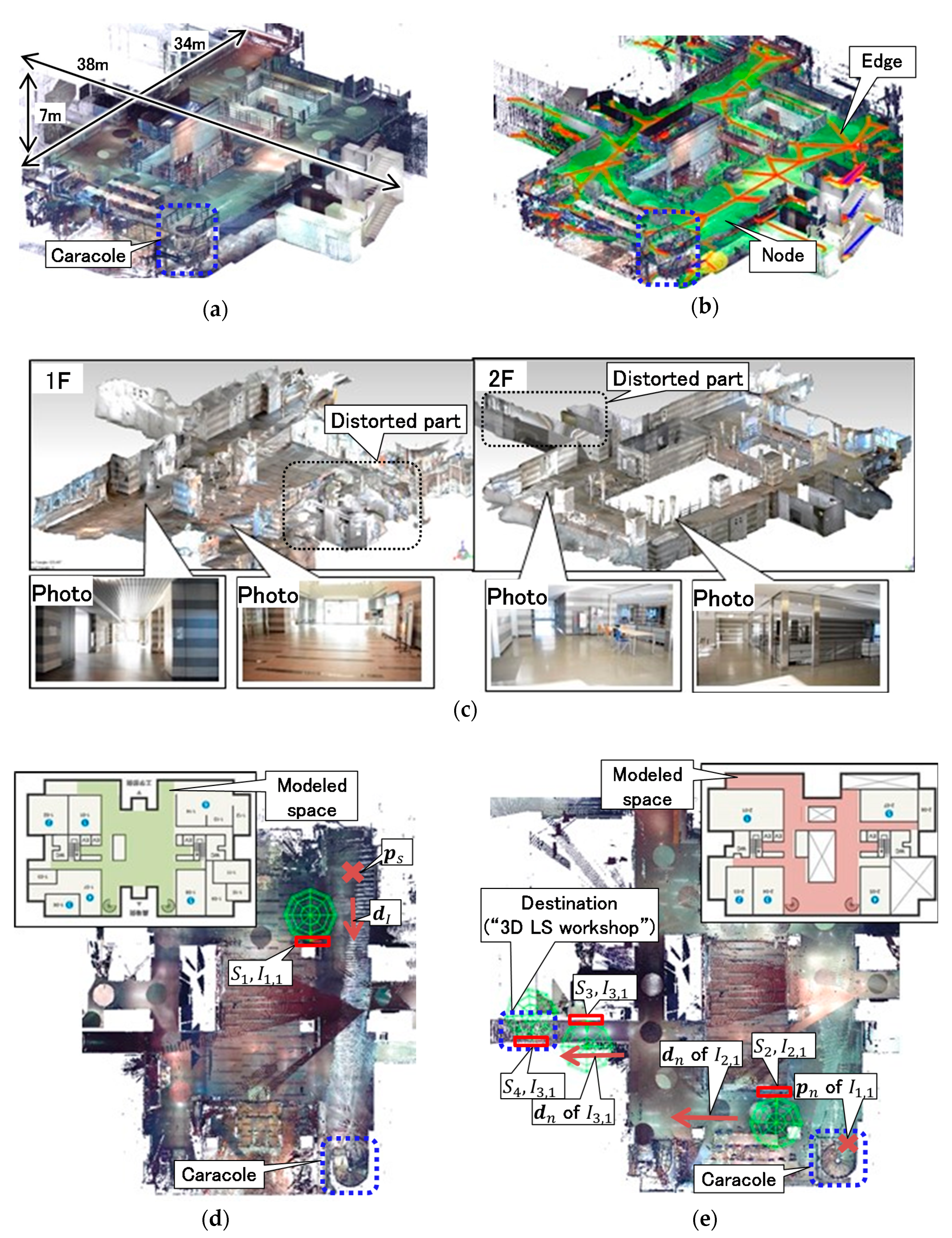
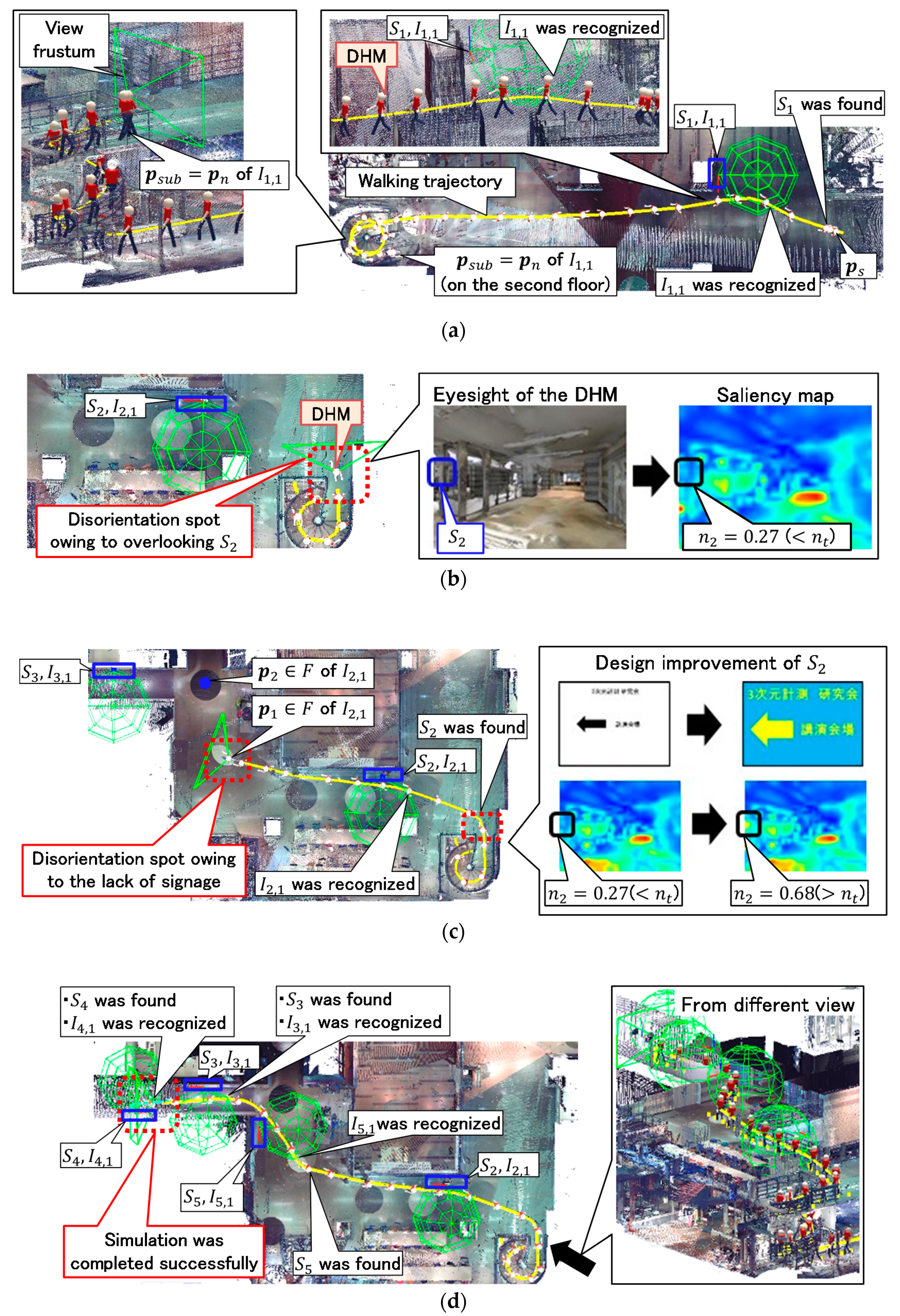
6.2. Evaluation Results of Ease of Wayfinding in Real Two-Story Indoor Environment
- The proposed system could detect disorientation spots resulting from the lack of signage and overlooking signage.
- The proposed system could simulate the wayfinding of the DHM even in the realistic and complex as-is environment model.
- The proposed system could quickly re-evaluate rearranged signage based on the simulation.
6.3. Efficiency of Environment Modeling and Simulation
6.4. Experimental Validation of System for Evaluating Ease of Wayfinding
6.4.1. Overview of Wayfinding Experiment
6.4.2. Comparison of Wayfinding Results between DHM and Subjects
7. Conclusions
- Our system makes it possible to evaluate the ease of wayfinding by simulating the 3D interactions among the realistic wayfinding behaviors of a DHM, as-is environment model, and realistic signage system.
- Under the user-specified wayfinding scenario, the system simulates the wayfinding of the DHM by evaluating signage locations, continuity, visibility, legibility, and noticeability based on the imitated visual perception of the DHM.
- Realistic signage system, including four types of signage, namely, positional, directional, routing, and identification, can be discriminated in the wayfinding simulation.
- Disorientation spots owing to the lack of signage and overlooking signage can be identified only by conducting the simulation.
- Rearranged signage plans can be re-evaluated quickly by carrying out the simulation alone.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Health Organization. WHO Global Report on Falls Prevention in Older Age. Available online: http://www.who.int/ageing/publications/Falls_prevention7March.pdf (accessed on 30 June 2017).
- International Organization for Standardization. ISO21542: Building Construction—Accessibility and Usability of the Built Environment. Available online: https://www.iso.org/standard/50498.html (accessed on 15 December 2011).
- International Organization for Standardization/International Electrotechnical Commission. ISO/IEC Guide 71 Second Edition: Guide for Addressing Accessibility in Standards. Available online: http://www.iec.ch/webstore/freepubs/isoiecguide71%7Bed2.0%7Den.pdf (accessed on 1 December 2014).
- Rubenstein, L.Z. Falls in Older People: Epidemiology, Risk Factors and Strategies for Prevention. Available online: https://www.ncbi.nlm.nih.gov/pubmed/16926202 (accessed on 22 June 2017).
- Maruyama, T.; Kanai, S.; Date, H. Tripping risk evaluation system based on human behavior simulation in laser-scanned 3D as-is environments. J. Comput. Des. Eng. 2017. under review. [Google Scholar]
- Churchill, A.; Dada, E.; de Barros, A.G.; Wirasinghe, S.C. Quantifying and validating measures of airport terminal wayfinding. J. Air Transp. Manag. 2008, 14, 151–158. [Google Scholar] [CrossRef]
- Hunt, E.; Waller, D. Orientation and Wayfinding: A Review. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.46.5608 (accessed on 30 June 2017).
- Hölscher, C.; Büchner, S.J.; Brosamle, M.; Meilinger, T.; Strube, G. Signs and maps: Cognitive economy in the use of external aids for indoor navigation. In Proceedings of the 29th Annual Conference of the Cognitive Science Society, Nashville, TE, USA, 1–4 August 2007. [Google Scholar]
- Yasufuku, K.; Akizuki, Y.; Hokugo, A.; Takeuchi, Y.; Takashima, A.; Matsui, T.; Suzuki, H.; Pinheiro, A.T.K. Noticeability of illuminated route signs for tsunami evacuation. Fire Saf. J. 2017, in press. [Google Scholar] [CrossRef]
- Thora, T.; Bergmann, E.; Konieczny, L. Wayfinding and description strategies in an unfamiliar complex building. In Proceedings of the 33rd Annual Conference of the Cognitive Science Society, Boston, MA, USA, 20–23 July 2011. [Google Scholar]
- Vilar, E.; Rebelo, F.; Noriega, P. Indoor human wayfinding performance using vertical and horizontal signage in virtual reality. Hum. Factors Ergon. Manuf. Serv. Ind. 2014, 24, 601–605. [Google Scholar] [CrossRef]
- Buechner, S.J.; Wiener, J.; Hölscher, S. Methodological triangulation to assess sign placement. In Proceedings of the Symposium on Eye Tracking Research and Applications, Santa Barbara, CA, USA, 28–30 March 2012. [Google Scholar]
- Furubayashi, S.; Yabuki, N.; Fukuda, T. A data model for checking directional signage at railway stations. In Proceedings of the First International Conference on Civil and Building Engineering Informatics, Tokyo, Japan, 7–8 November 2013. [Google Scholar]
- Chen, Q.; de Vries, B.; Nivf, M.K. A wayfinding simulation based on architectural features in the virtual built environment. In Proceedings of the 2011 Summer Computer Simulation Conference, Hague, The Netherlands, 27–30 June 2011. [Google Scholar]
- Morrow, E.; Mackenzie, I.; Nema, G.; Park, D. Evaluating three dimensional vision fields in pedestrian microsimulations. Transp. Res. Procedia 2014, 2, 436–441. [Google Scholar] [CrossRef]
- Hajibabai, L.; Delavar, M.R.; Malek, M.R.; Frank, A.U. Agent-Based Simulation of Spatial Cognition and Wayfinding in Building Fire Emergency Evacuation. Available online: https://publik.tuwien.ac.at/files/pub-geo_1946.pdf (accessed on 22 June 2017).
- Brunnhuber, M.; Schrom-Feiertag, H.; Luksch, C.; Matyus, T.; Hesina, G. Bridging the gaps between visual exploration and agent-based pedestrian simulation in a virtual environment. In Proceedings of the 18th ACM Symposium on Virtual Reality Software and Technology, Toronto, ON, Canada, 10–12 December 2012. [Google Scholar]
- Becker-Asano, C.; Ruzzoli, F.; Hölscher, C.; Nebel, B. A multi-agent system based on unity 4 for virtual perception and wayfinding. Transp. Res. Procedia 2014, 2, 452–455. [Google Scholar] [CrossRef]
- Zhang, Z.; Jia, L.; Qin, Y. Optimal number and location planning of evacuation signage in public space. Saf. Sci. 2017, 91, 132–147. [Google Scholar] [CrossRef]
- Motamedi, A.; Wang, Z.; Yabuki, N.; Fukuda, T.; Michikawa, T. Signage visibility analysis and optimization system using BIM-enabled virtual reality (VR) environments. Adv. Eng. Inf. 2017, 32, 248–262. [Google Scholar] [CrossRef]
- Phaholthep, C.; Sawadsri, A.; Bunyasakseri, T. Evidence-based research on barriers and physical limitations in hospital public zones regarding the universal design approach. Asian Soc. Sci. 2017, 13, 133. [Google Scholar] [CrossRef]
- Maruyama, T.; Kanai, S.; Date, H. Simulating a Walk of Digital Human Model Directly in Massive 3D Laser-Scanned Point Cloud of Indoor Environments. Available online: https://link.springer.com/chapter/10.1007/978-3-642-39182-8_43 (accessed on 22 June 2017).
- Maruyama, T.; Kanai, S.; Date, H.; Tada, M. Motion-capture-based walking simulation of digital human adapted to laser-scanned 3D as-is environments for accessibility evaluation. J. Comput. Des. Eng. 2016, 3, 250–265. [Google Scholar] [CrossRef]
- Maruyama, T.; Kanai, S.; Date, H. Vision-based wayfinding simulation of digital human model in three dimensional as-is environment models and its application to accessibility evaluation. In Proceedings of the International Design Engineering Technical Conferences & Computers & Information in Engineering Conference, Charlotte, NC, USA, 6–9 August 2016. [Google Scholar]
- Filippidis, L.; Galea, E.R.; Gwynne, S.; Lawrence, P.J. Representing the influence of signage on evacuation behavior within an evacuation model. J. Fire Prot. Eng. 2006, 16, 37–73. [Google Scholar] [CrossRef]
- Xie, H.; Filippidis, L.; Gwynne, S.; Galea, E.R.; Blackshields, D.; Lawrence, P.J. Signage legibility distances as a function of observation angle. J. Fire Prot. Eng. 2007, 17, 41–64. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Mochimaru, M. AIST Gait Database 2013. Available online: https://www.dh.aist.go.jp/database/gait2013/ (accessed on 22 June 2017).
- Itti, L.; Koch, C.; Niebur, E. A model of saliency-based visual-attention for rapid scene analysis. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1254–1259. [Google Scholar] [CrossRef]
- Treisman, A.M.; Gelade, G. A feature-integration theory of attention. Cogn. Psychol. 1980, 12, 97–136. [Google Scholar] [CrossRef]
- FreeCAD: An Open-Source Parametric 3D CAD Modeler. Available online: https://www.freecadweb.org/ (accessed on 22 June 2017).
- Takashi, T.; Keita, I.B. Physiology. In Handbook of Environmental Design, 2nd ed.; Koichi, I., Ed.; Maruzen Publishing: Tokyo, Japan, 2003. [Google Scholar]
- 3D Laser-Scanner FARO. Available online: http://www.faro.com/products/3d-surveying/laserscanner-faro-focus/overview (accessed on 22 June 2017).
- Bentley—Reality Modeling Software. Available online: https://www.bentley.com/en/products/brands/contextcapture (accessed on 22 June 2017).
- Nikon D3300. Available online: http://www.nikon-image.com/products/slr/lineup/d3300/ (accessed on 22 June 2017).
- Floor Maps of Graduate School of Information Science and Technology. Available online: http://www.ist.hokudai.ac.jp/facilities/ (accessed on 22 June 2017).
- O’Neill, M.J. Evaluation of a conceptual model of architectural legibility. Environ. Behav. 1991, 23, 259–284. [Google Scholar] [CrossRef]
- Database of Sensory Characteristics of Older Persons with Disabilities. Available online: http://scdb.db.aist.go.jp/ (accessed on 22 June 2017).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signage Type | Navigation Information |
|---|---|
| Positional signage | Next goal position to be reached to arrive at a destination (e.g., map) |
| Directional signage | Next walking direction to take to reach a destination (e.g., right or left) |
| Routing signage | Walking route to be taken to reach a destination (e.g., route drawn on map or indicated by textual information) |
| Identification signage | Name of current place |
| Property | Attribute | Assignment Method |
|---|---|---|
| Geometric property | Description region | Assigned by user by picking two diagonal points |
| Center position | Estimated from | |
| Unit normal vector | ||
| Width | ||
| Transformation matrix | Estimated from and | |
| Navigation property | Type of signage | Assigned by user based on the signage design |
| Name of indicated place | ||
| Navigation information | ||
| Legibility property | Maximum viewing distance | Measured from human subjects |
| Center point of 3D VCA | Estimated from | |
| Radius of 3D VCA |
| Signage Type | Navigation Information to Achieve a Destination | Referenced Coordinate System |
|---|---|---|
| Positional signage | Next goal position | of |
| Directional signage | Next walking direction | of |
| Routing signage | A set of passing points | of |
| Identification signage | Name of current place | None |
| Parameters | Specified Values |
|---|---|
| MoCap data for flat walking of | MoCap data of a young male subject (Age: 22 years, height: 1.73 m) |
| Horizontal angle of view frustum of | 100 deg 1 |
| Vertical angle of view frustum of | 60 deg 1 |
| Noticeability threshold of | 0.3 2 |
| Start position | Shown in Figure 10d |
| Initial walking direction | |
| Name of destination | “Goal“ |
| Signage locations and orientations | Shown in Figure 10d |
| Parameters | Sign | Sign | Sign | Sign | Sign |
|---|---|---|---|---|---|
| Type of signage | ‘Positional’ | ‘Directional’ | ‘Directional’ | ‘Routing’ | ‘Identification’ |
| Name of indicated place | “Goal” | ||||
| Navigation information | Shown in Figure 10d | “Goal” | |||
| Maximum viewing distance | 4.0 m 1 | 5.0 m 1 | 1.74 m 1 | ||
| Process | Time Required in Case of Virtual Maze | Time Required in Case of Two-Story Indoor Environment |
|---|---|---|
| Automatic construction of and from laser-scanned point clouds | 2.5 s (#points: 963,691) 1 | 50.0 s (#points: 5,980,647) 1 |
| Automatic construction of using SfM software [33] | Approximately 1 week (#photos: 21,143) (resolution: 1920 × 1080) | |
| Signage visibility, legibility, and noticeability estimation | Less than 0.17 s | |
| Signage-based motion planning | Less than 0.02 s | |
| One-step walking motion generation with 100 frames interpolation 2 | 0.15 s | 2.5 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maruyama, T.; Kanai, S.; Date, H.; Tada, M. Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models. ISPRS Int. J. Geo-Inf. 2017, 6, 267. https://doi.org/10.3390/ijgi6090267
Maruyama T, Kanai S, Date H, Tada M. Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models. ISPRS International Journal of Geo-Information. 2017; 6(9):267. https://doi.org/10.3390/ijgi6090267
Chicago/Turabian StyleMaruyama, Tsubasa, Satoshi Kanai, Hiroaki Date, and Mitsunori Tada. 2017. "Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models" ISPRS International Journal of Geo-Information 6, no. 9: 267. https://doi.org/10.3390/ijgi6090267
APA StyleMaruyama, T., Kanai, S., Date, H., & Tada, M. (2017). Simulation-Based Evaluation of Ease of Wayfinding Using Digital Human and As-Is Environment Models. ISPRS International Journal of Geo-Information, 6(9), 267. https://doi.org/10.3390/ijgi6090267