Analysis of Hydrological Sensitivity for Flood Risk Assessment

Abstract
:1. Introduction
Objectives
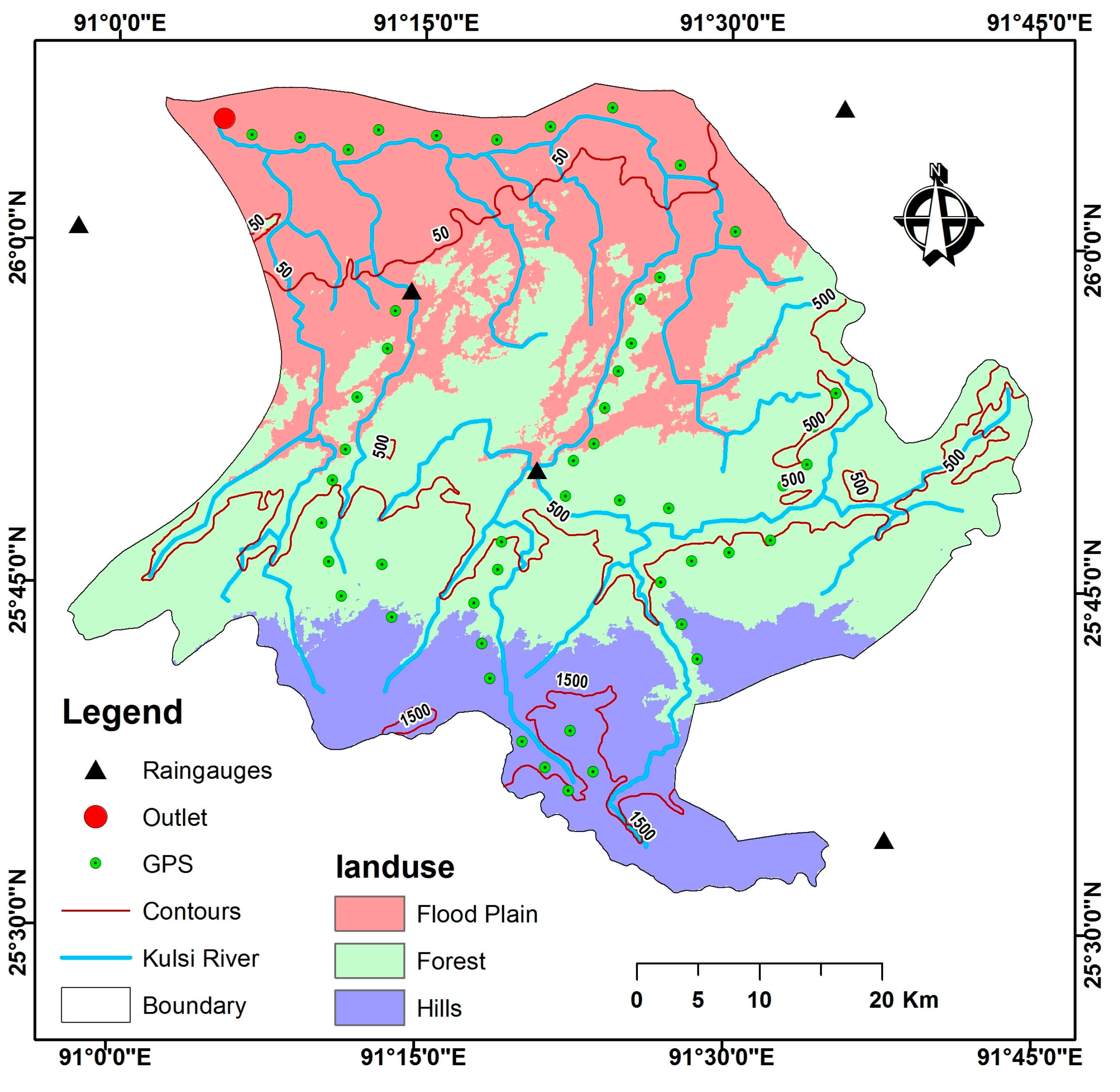
2. Study Area
2.1. Data
2.2. Methods
- h = height of the water from the local surface,
- = unit width discharges in x and y directions,
- = flow velocity in x and y directions,
- = rainfall intensity,
- = infiltration rate,
- = height of the water from the datum,
- = density of water,
- = gravitational acceleration, and
- = shear stress in x and y directions.
3. Results
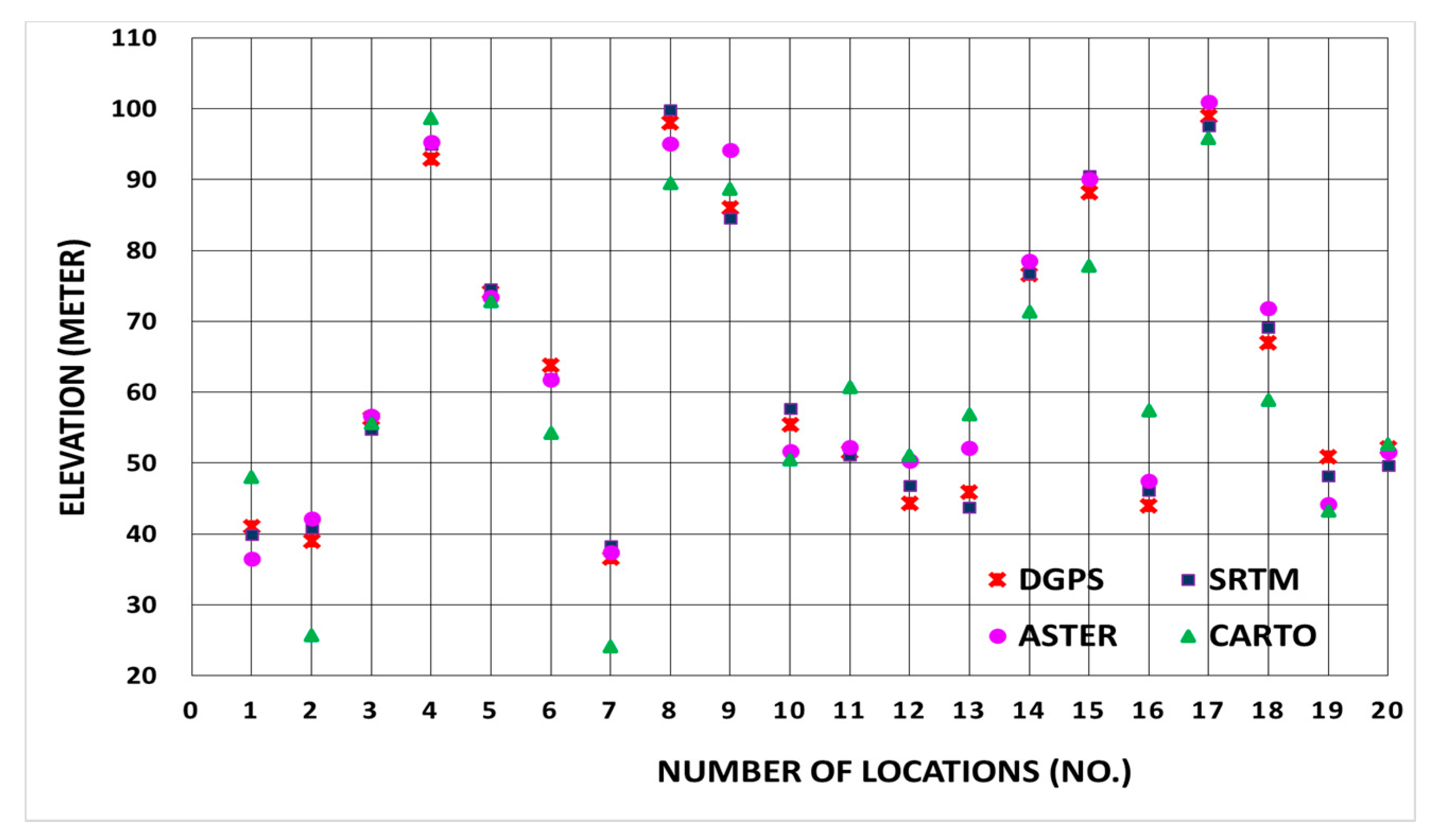
3.1. Topographic Data Processing
3.2. Sensitivity Analysis of Manning’s Roughness Coefficient in Hydrologic Simulation
3.3. Sensitivity Analysis of Soil Depth in Hydrologic Simulation
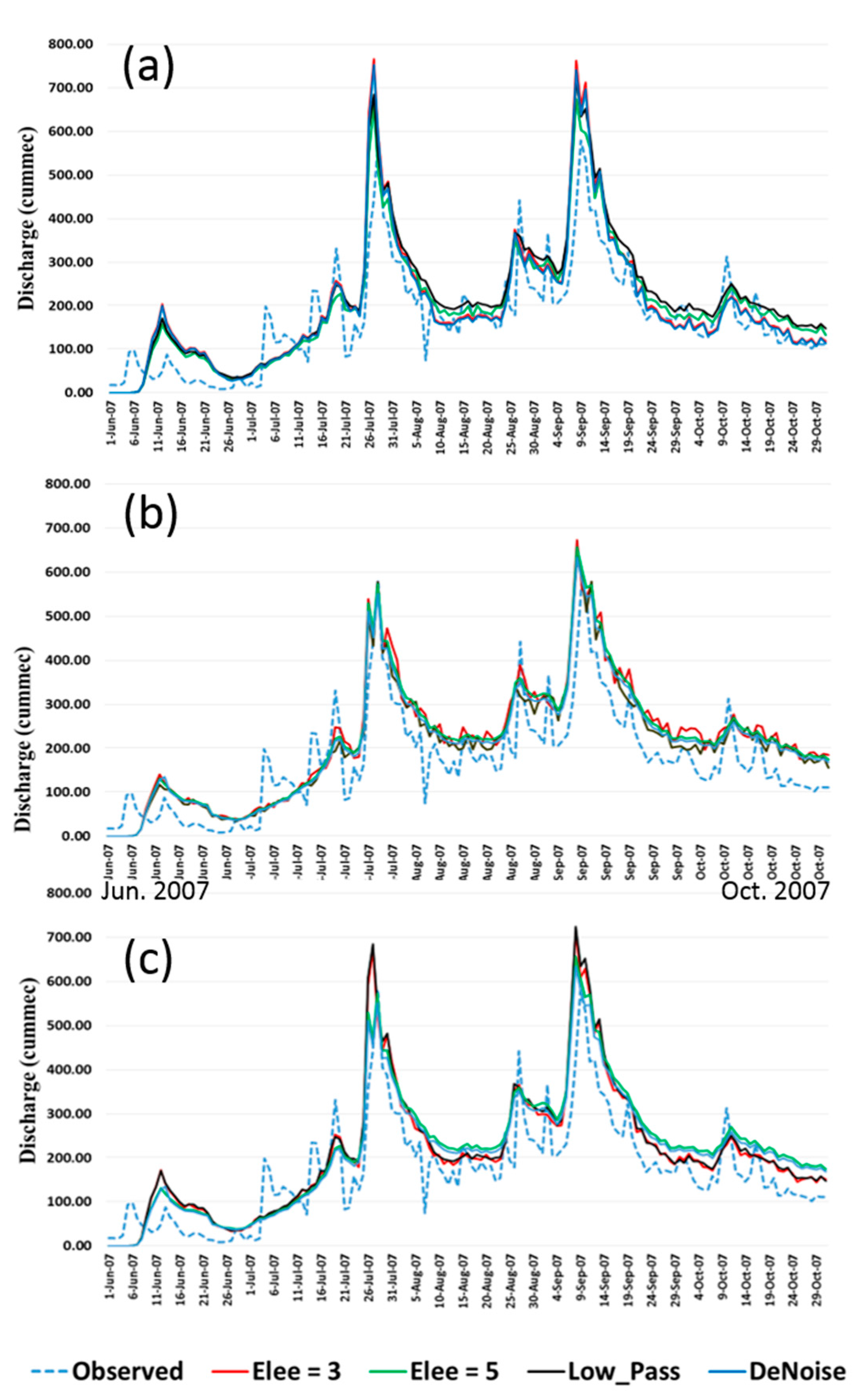
3.4. Sensitivity Analysis of Smoothing of Different DEMs on Hydrologic Simulation
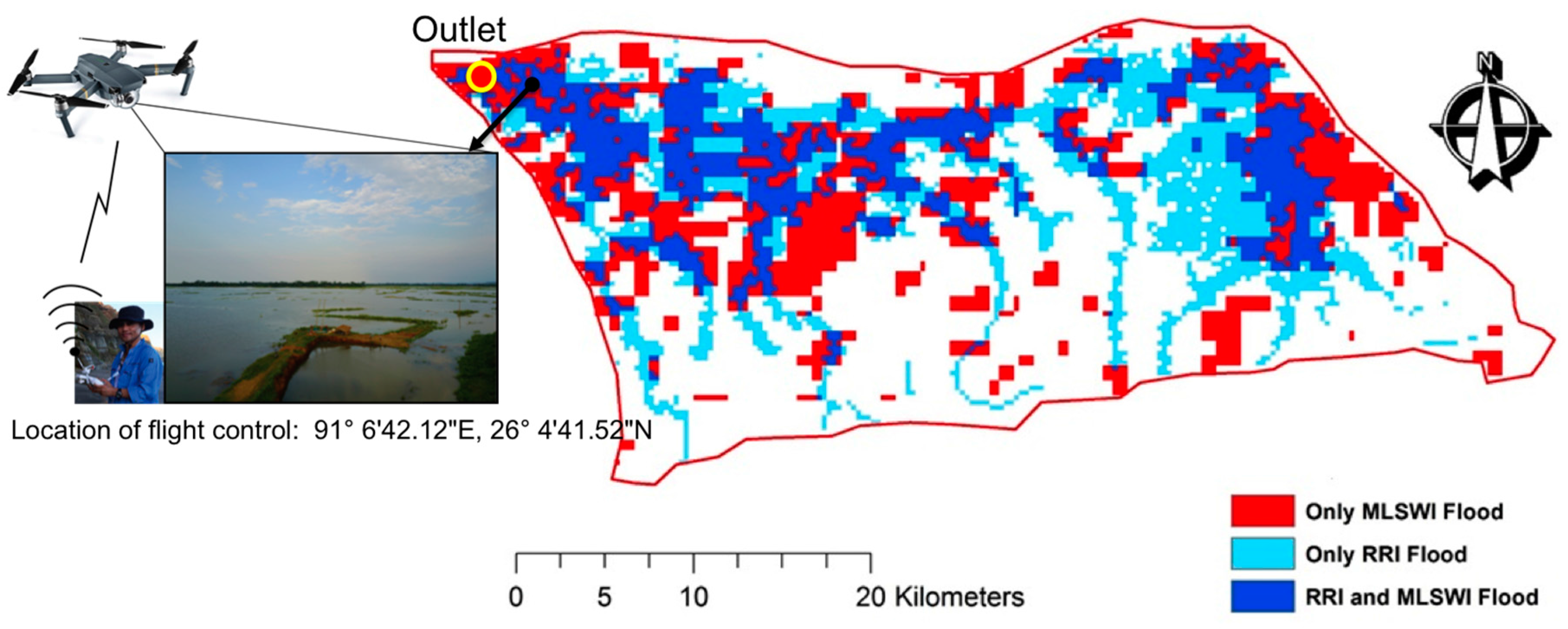
3.5. Simulation of Flood Extent Using the Rainfall-Runoff-Inundation (RRI) Model
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Global Water Partnership. Integrated Water Resource Management (IWRM) at a Glance: Technical Advisory Committee; Global Water Partnership Secretariat: Stockholm, Sweden, 2000. [Google Scholar]
- UNESCO. Introduction of the Integrated Water Resources Management (IWRM) Guidelines at River Basin Level; UN-World Water Assessment Programme (WWAP): Paris, France, 2009; 39p. [Google Scholar]
- UNEP. The UN-Water Status Report on the Application of Integrated Approaches to Water Resources Management; UNEP: Nairobi, Kenya, 2012; 106p. [Google Scholar]
- Sanders, B.F. Evaluation of on-line DEMs for flood inundation modeling. Adv. Water Resour. 2007, 30, 1831–1843. [Google Scholar] [CrossRef]
- Cook, A.; Merwade, V. Effect of topographic data, geometric configuration and modeling approach on flood inundation mapping. J. Hydrol. 2009, 377, 131–142. [Google Scholar] [CrossRef]
- Manfreda, S.; Sole, A.; Fiorentino, M. Can the basin morphology alone provide an insight into floodplain delineation. WIT Trans. Ecol. Environ. 2008, 118, 47–56. [Google Scholar]
- Kirkby, M.J. Hydrograph Modeling Strategies; Department of Geography, University of Leeds: Leeds, UK, 1975. [Google Scholar]
- Vaze, J.; Teng, J.; Spencer, G. Impact of DEM accuracy and resolution on topographic indices. Environ. Model. Softw. 2010, 25, 1086–1098. [Google Scholar] [CrossRef]
- Cobby, D.M.; Mason, D.C.; Davenport, I.J. Image processing of airborne scanning laser altimetry data for improved river flood modeling. ISPRS J. Photogramm. Remote Sens. 1999, 56, 121–138. [Google Scholar] [CrossRef]
- Casas, A.; Benito, G.; Thorndycraft, V.R.; Rico, M. The topographic data source of digital terrain models as a key element in the accuracy of hydraulic flood modeling. Earth Surf. Process. Landf. 2006, 31, 444–456. [Google Scholar] [CrossRef]
- Schumann, G.; Matgen, P.; Cutler, M.E.J.; Black, A.; Hoffmann, L.; Pfister, L. Comparison of remotely sensed water stages from LiDAR, topographic contours and SRTM. ISPRS J. Photogramm. Remote Sens. 2008, 63, 283–296. [Google Scholar] [CrossRef]
- Kwak, Y.; Takeuchi, K.; Fukami, J.; Magome, J. A new approach to flood risk assessment in Asia-Pacific region based on MRI-AGCM outputs. Hydrol. Res. Lett. 2012, 6, 55–60. [Google Scholar] [CrossRef]
- Patro, S.; Chatterjee, C.; Mohanty, S.; Singh, R.; Raghuwanshi, N.S. Flood inundation modeling using MIKE FLOOD and remote sensing data. J. Indian Soc. Remote Sen. 2009, 37, 107–118. [Google Scholar] [CrossRef]
- Tarekegn, T.H.; Haile, A.T.; Rientjes, T.; Reggiani, P.; Alkema, D. Assessment of an ASTER-generated DEM for 2D hydrodynamic flood modeling. Int. J. Appl. Earth Observ. Geoinf. 2010, 12, 457–465. [Google Scholar] [CrossRef]
- Paiva, R.C.; Collischonn, W.; Tucci, C.E. Large scale hydrologic and hydrodynamic modeling using limited data and a GIS based approach. J. Hydrol. 2011, 406, 170–181. [Google Scholar] [CrossRef]
- The Ministry of Economy, Trade and Industry of Japan (METI) and the National Aeronautics and Space Administration (NASA), ASTER Global Digital Elevation Model (ASTER GDEM). Available online: http://www.jspacesystems.or.jp/ersdac/GDEM/E/index.html (accessed on 10 January 2015).
- National Remote Sensing Indian Space Research Organisation (NRSC). Available online: http://www.nrsc.gov.in/ (accessed on 10 January 2015).
- Food and Agriculture Organization of the United Nations (FAO). Harmonized World Soil Database v 1.2. Available online: http://www.fao.org/soils-portal/soil-survey/soil-maps-and-databases/harmonized-world-soil-database-v12/en/ (accessed on 10 January 2015).
- Land Processes Distributed Active Archive Center. US Geological Survey Land Processes Distributed Active Archive Center. Available online: https://lpdaac.usgs.gov/ (accessed on 20 May 2015).
- Sayama, T.; Ozawa, G.; Kawakami, T.; Nabesaka, S.; Fukami, K. Rainfall–runoff–inundation analysis of the 2010 Pakistan flood in the Kabul River basin. Hydrol. Sci. J. 2012, 57, 298–312. [Google Scholar] [CrossRef]
- Sayama, T.; Tatebe, Y.; Iwami, Y.; Tanaka, S. Hydrologic sensitivity of flood runoff and inundation: 2011 Thailand floods in the Chao Phraya River basin. Nat. Hazards Earth Syst. Sci. 2015, 15, 1617–1630. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Rosin, P.L.; Martin, R.R.; Langbein, F.C. Fast and effective feature-preserving mesh denoising. IEEE Trans. Vis. Comput. Graphics 2007, 13, 925–938. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.S. Refined filtering of image noise using local statistics. Comput. Graphics Image Process. 1981, 15, 380–389. [Google Scholar] [CrossRef]
- Kwak, Y.; Arifuzzanman, B.; Iwami, Y. Prompt proxy mapping of flood damaged rice fields using MODIS-derived indices. Remote Sens. 2015, 7, 15969–15988. [Google Scholar] [CrossRef]
- Kwak, Y. Nationwide Flood Monitoring for Disaster Risk Reduction Using Multiple Satellite Data. ISPRS Int. J. Geo-Inf. 2017, 6, 203. [Google Scholar] [CrossRef]
- Sharma, K.; Saraf, A.K.; Das, J.D.; Rawat, V.; Shujat, Y. SRTM and ASTER DEM characteristics of two areas from Himalayan region. Int. Geoinf. Res. Dev. J. 2010, 1, 25–31. [Google Scholar]
- Rahimy, P. Effects of soil depth spatial variation on runoff simulation using the Limburg Soil Erosion Model (LISEM), a case Study in Faucon Catchment, France. Soil Water Res. 2012, 7, 52–63. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Statistics | SRTM | ASTER | CARTO |
|---|---|---|---|
| Minimum elevation (m) | 35.0 | 26.0 | 33.0 |
| Maximum elevation (m) | 1919.0 | 1914.0 | 1926.0 |
| Mean elevation (m) | 869.1 | 833.5 | 852.7 |
| Standard deviation | 539.6 | 551.6 | 541.3 |
| Source of DEM | Flood Plains | Forests and Hills | ||
|---|---|---|---|---|
| RMSE (m) | MAE (m) | RMSE (m) | MAE (m) | |
| SRTM | 1.88 | 1.73 | 9.53 | 8.82 |
| ASTER | 3.85 | 3.15 | 6.95 | 5.94 |
| CARTO | 8.08 | 7.08 | 8.81 | 10.46 |
| Source of DEM | Inundation Area (km2) | ||||
| Without Smoothing | Low Pass Filter | Lee Filter (Size = 3) | Lee Filter (Size = 5) | Denoising Algorithm | |
| SRTM | 310.76 | 279.66 | 262.20 | 260.69 | 364.18 |
| ASTER | 433.83 | 377.13 | 431.03 | 442.94 | 450.95 |
| CARTO | 348.68 | 306.21 | 382.36 | 304.41 | 366.25 |
| Source of DEM | CSI | ||||
| Without Smoothing | Low Pass Filter | Lee Filter (Size = 3) | Lee Filter (Size = 5) | Denoising Algorithm | |
| SRTM | 0.45 | 0.31 | 0.28 | 0.28 | 0.47 |
| ASTER | 0.47 | 0.41 | 0.46 | 0.49 | 0.57 |
| CARTO | 0.44 | 0.33 | 0.42 | 0.32 | 0.51 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.K.; Kwak, Y.-J.; Kumar, R.; Sarma, B. Analysis of Hydrological Sensitivity for Flood Risk Assessment. ISPRS Int. J. Geo-Inf. 2018, 7, 51. https://doi.org/10.3390/ijgi7020051
Sharma SK, Kwak Y-J, Kumar R, Sarma B. Analysis of Hydrological Sensitivity for Flood Risk Assessment. ISPRS International Journal of Geo-Information. 2018; 7(2):51. https://doi.org/10.3390/ijgi7020051
Chicago/Turabian StyleSharma, Sanjay Kumar, Young-Joo Kwak, Rakesh Kumar, and Bibhash Sarma. 2018. "Analysis of Hydrological Sensitivity for Flood Risk Assessment" ISPRS International Journal of Geo-Information 7, no. 2: 51. https://doi.org/10.3390/ijgi7020051
APA StyleSharma, S. K., Kwak, Y. -J., Kumar, R., & Sarma, B. (2018). Analysis of Hydrological Sensitivity for Flood Risk Assessment. ISPRS International Journal of Geo-Information, 7(2), 51. https://doi.org/10.3390/ijgi7020051