1. Introduction
The shortest path problem is well studied in the literature and has been applied in many different types of applications in the field of Geographic Information Science and Technology that range from habitat connectivity to vehicle routing. Shortest path algorithms form the basis for personal and vehicle navigation, where a path of least travel time, travel cost, or some other metric is used. People tend to use navigation aids in order to find their way in unfamiliar environments. In addition, many cars are equipped with a built-in or mobile navigation system that is capable of receiving (near) real-time traffic information—e.g., closed roads or traffic congestion, and many may guide drivers to routes that are less congested (e.g., Waze). Many products like Waze give the same guidance to everyone, which can lead to creating new evolving areas of congestion.
Navigation is comprised of two activities “way finding” (planning) and “locomotion” (execution of movements) [
1]. Due to the fact that (near) real-time information is now integrated into the navigation process, the separation between “planning” and “execution of movements”, described as wayfinding and locomotion in [
1], appears to be diminishing. We argue that the separation of the processes wayfinding strictly happening before locomotion is questionable. In the literature, navigation is described in a way that the user selects a destination and one or a combination of costs (e.g., time, fuel cost, travel distance) that can be used in evaluating possible routes. Based on the chosen cost function the navigation system responds with the minimum cost route from the current location to the destination. This planning process is valid for non-dynamic traffic situations but does not consider traffic as a “living” system, that displays certain dynamics. This is due to the fact that there are a number of players on a road network, each making their own decisions, where those decisions affect in concert the state of the network in the future. Hence, the network and associated attributes are time-dependent, and an accurate deterministic prediction cannot be made. In order to find shortest paths in a dynamic network several methods have been developed [
2,
3,
4,
5,
6]. These algorithms try to “react” to dynamic conditions in the road network, and identify one shortest path for exactly one agent navigating in the network in a given situation—i.e., network status within the time-frame of the shortest path traversal).
From the literature it is evident that route planning models are tailored towards one single user, and thus do not address the fact that other agents are also making their decisions, each impacting the outcomes of others. In order to simulate decisions of a group of agents, game theory is employed in the literature [
7]. Braess [
8] identified a problem in traffic modeling that has since been called “Braess Paradox”, which describes a situation where a given set of players in a traffic network each try to find their “best route” in a selfish manner. Hence, selfish players choose the fastest route from their own perspective, neglecting the effect for other players. Given that an extra edge is added to the network, a layman could assume that the average travel time of the players will be the same or lower than the original network layout as the overall capacity has been increased. For the Braess example, the travel times are higher than what happens on the original network without the extra edge.
Roughgarden [
7] and Braess [
8] both assume a non-cooperative game, where players are purely selfish. In this paper, we apply the concept of a group of cognitive agents where each agent/player is able to make decisions accordingly—and change the strategy accordingly. In order to investigate the effect of the behavior of cognitive agents the approach in this paper evaluates:
Varying probabilities of agents acting in a non-selfish way.
Varying levels of uncertainty in travel time information. That is, the information available on network congestion-status may be fuzzy for some agents.
The basic research question addressed in this paper is: “How do different compositions of selfish & non-selfish decisions of agents affect the delay or latency of all agents acting on the network, considering possible uncertainties in the information regarding network status?” The rationale behind the contributions of this paper is as follows. Due to the fact that selfish routing depends on selfish behavior of agents in a network, decisions can be considered to be crisp rather than fuzzy. This holds true for situations in which agents have accurate information on the network status and act purely selfish—one type of condition involving machines but probably never in a complete sense for humans. In a transport network with cognitive agents, we assume that each agent has the ability to act in a non-selfish way, as well as that traffic information may be defined as uncertain. The driver is not able to fully evaluate the accuracy of the traffic situation ahead, due to the following reasons:
- (a)
Real-time traffic applications (like Waze) are dependent on the number of users collecting & providing data. Such real-time applications have a high market share in certain countries, but they do not have a significant market penetration in all regions of the earth. In some European capital cities the numbers of Waze users are at a maximum. For example, in Paris approximately 51,000 users per/1 million citizens use the app. Other cities lag behind, for example Vienna involves only 1000 users/1 million citizens [
9].
- (b)
Traffic Message Channels (TMC) provide traffic information for vehicle drivers sent via FM radio frequency. This information can be included into any satnav system for routing purposes. The system is designed so that traffic information is only provided for major traffic junctions/locations collected in a location table—which results in inaccuracies in the location and extent of any traffic congestion.
- (c)
As TMC or FM radio provided traffic information requires that traffic information be collected, checked and published thereafter, there is a temporal delay between the incident and the publishing of the traffic information. In FM radio stations, the updates on traffic may be broadcasted every 30 min, which means an incident may have cleared by the time that the information is broadcasted.
- (d)
As we deal with a dynamic situation, the traffic conditions ahead of an agent may alter as the agent moves toward an incident location that is along the desired route. Hence, any agent has to rely on a prediction on how the situation might change—especially when the agent does not receive any timely update on the situation as he/she comes closer to the incident location.
Therefore, the provided traffic information can be regarded as only partly accurate. An agent does not necessarily have full trust in the provided traffic information—as the situation might differ from what is expected when the agent arrives at the incident location. Generally speaking, in real world situations any agent in a network does not necessarily have an accurate, timely overview on the network status. Kattan et al. [
10] concluded that commuters who sought information from many traffic update sources were likely to be more compliant with the traffic advice when they received it. Hence, agents do not necessarily react to traffic updates accordingly, when they only have one single source of information or when updates are less frequent.
A key component in Intelligent Transportation Systems (ITS) is to forecast the number of vehicles and their positions in a traffic system [
11]. The traffic forecasting is done with the collection of current traffic data. These data are amended with ancillary data as well as a trip demand model. In literature a number of traffic forecast models have been proposed. The classic approach is the Four-Step model [
12]. The theoretical approach of this model is based upon the decomposing the process into four steps: Trip generation, trip distribution, mode choice and route assignment. Route assignment describes the allocation of trips between origin and destination. Wardrop’s principle [
13], equivalent to the Nash equilibrium, is applied in the route assignment step. This problem is a so-called bi-level problem, as the travel times are a function of the demand along route segments and demand is a function of travel time along those very same segments. Other approaches utilize the Stackelberg competition model, where agents in a traffic network respond to actions of a leading instance.
The contribution of the paper is as follows. With the help of agent-based approach we show that the behavior and the agents influence the overall latency. This aspect in itself is not new, but what is new is the fact that we model agents where they are provided traffic information where there is a degree of uncertainty as to its accuracy. Agent decisions based upon this uncertain information on the traffic status may decrease/increase the overall latency, as they tend to make “wrong” decisions with respect to the real network status and in relation to their chosen strategy (i.e., selfish verses non-selfish behavior).
This paper is organized as follows. In the next section the relevant literature is briefly discussed and analyzed, followed by a section on the methodology applied in this paper to evaluate the effect of cognitive agents displaying varying degrees of selfish routing behavior and reliance on imperfect traffic information.
Section 4 presents the results and analysis, and is followed by a summary in the final section.
3. Quantifying the Impact of Cognitive Agents within a Collective of Players
This section outlines our approach to evaluate the effects of cognitive agents within the context of a group. We propose an agent-based approach to simulate the behavior of each of the players in a network with linear congestion functions as costs, similar to the selfish routing examples given in References [
7,
8]. Our networks will serve as the environment in which the agents act. We analyze the impacts that different probability levels of non-selfishness and levels of uncertainty of travel time information have on overall average travel delay for the group of agents, going beyond past work that involved solely selfish behavior.
For our experiments, the traffic network is defined as a directed Graph
G = (
V,
E) with linear cost functions
ce:
R+→
R+. That is, we can express travel delay or latency as
ce(
x) =
ax +
b. A Graph G has k source and destination vertex pairs {
s1,
t1}, … ,{
sk,
tk}. A simple pair of source and destination,
si −
ti, is denoted as
Pi and the set of pairs is designated as
P = {
Pi}. Any network flow is defined as a function
f:
P→
R+, and a fixed flow
f is defined as
. In addition, a finite, positive rate
ri is associated with each pair (
si,
ti), which represents the demand for travel or flow between source
si and destination
ti. Generally, a flow is feasible if
. Each edge
e ∈
E is given a load-dependent latency or travel time function that is denoted as
le(∙). The latency function is non-negative, differentiable and non-decreasing. Hence, the triple (
G,
r,
l) represents a specific problem instance. The latency of a path
P with respect to a feasible flow
f is the sum of latencies of the edges in the path represented by
. The cost
C(
f) of an entire set of flows
f in
G is the total latency incurred by
f and is defined by:
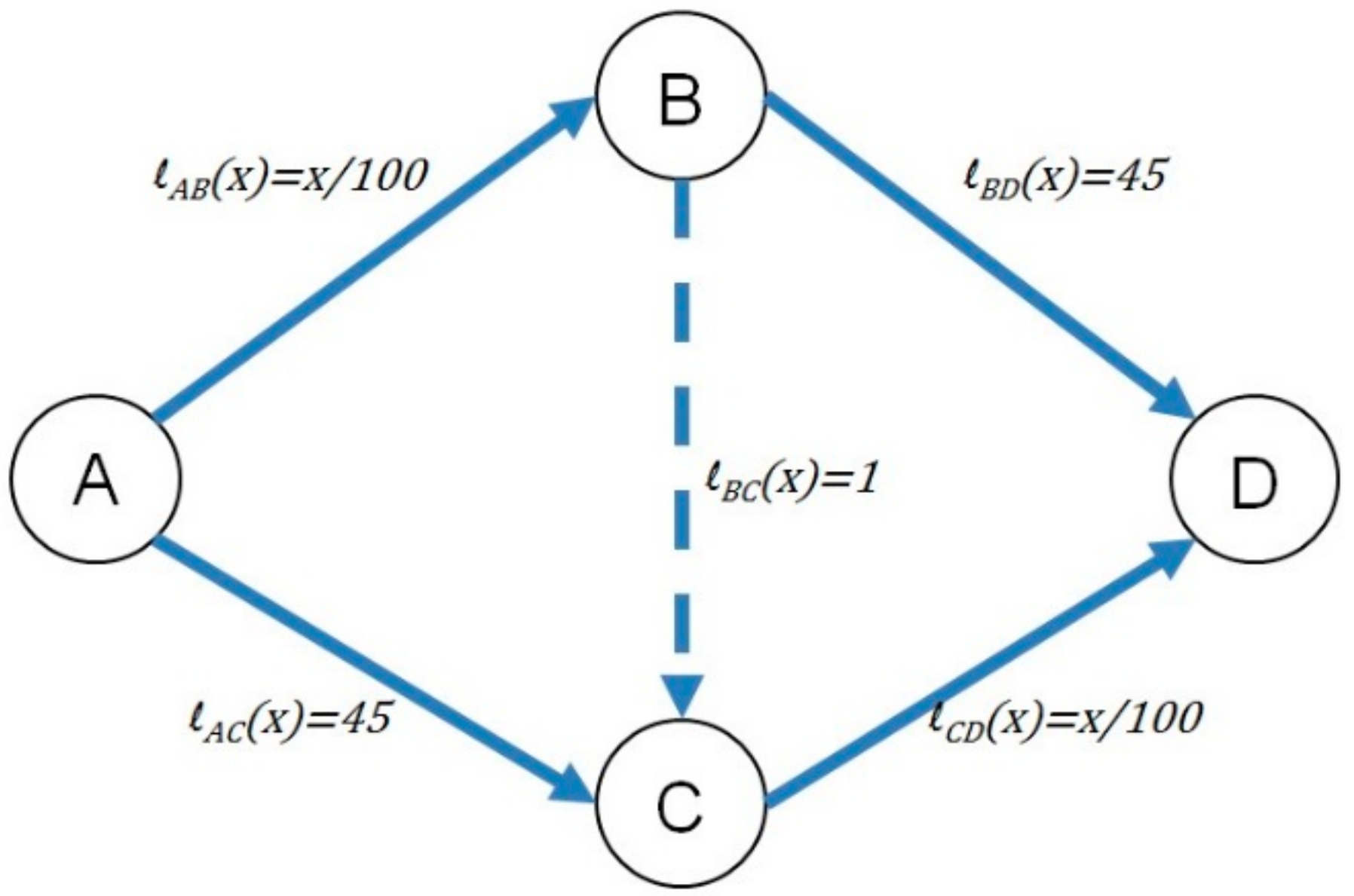
In order to create a “testbed” for selfish routing we define a problem instance (
G,
r,
l) comprised of a network, travel demands, and travel delay functions. The network that we use in our experiments is a directed Graph
G that has four nodes and four edges with linear latency functions. This network is depicted in
Figure 1 together with the latency functions
l for each edge. Two edges are assigned the latency functions
lAB =
lCD =
x/100 and the others are assigned
lBD =
lAC = 45—which are the latency functions used by Braess [
8]. In order to evaluate the effects of cognitive agents within the context of Braess Paradox, an “additional” edge is depicted with a dashed line from node
B to node
C. The extra edge is assigned a latency function of
lBC = 1.
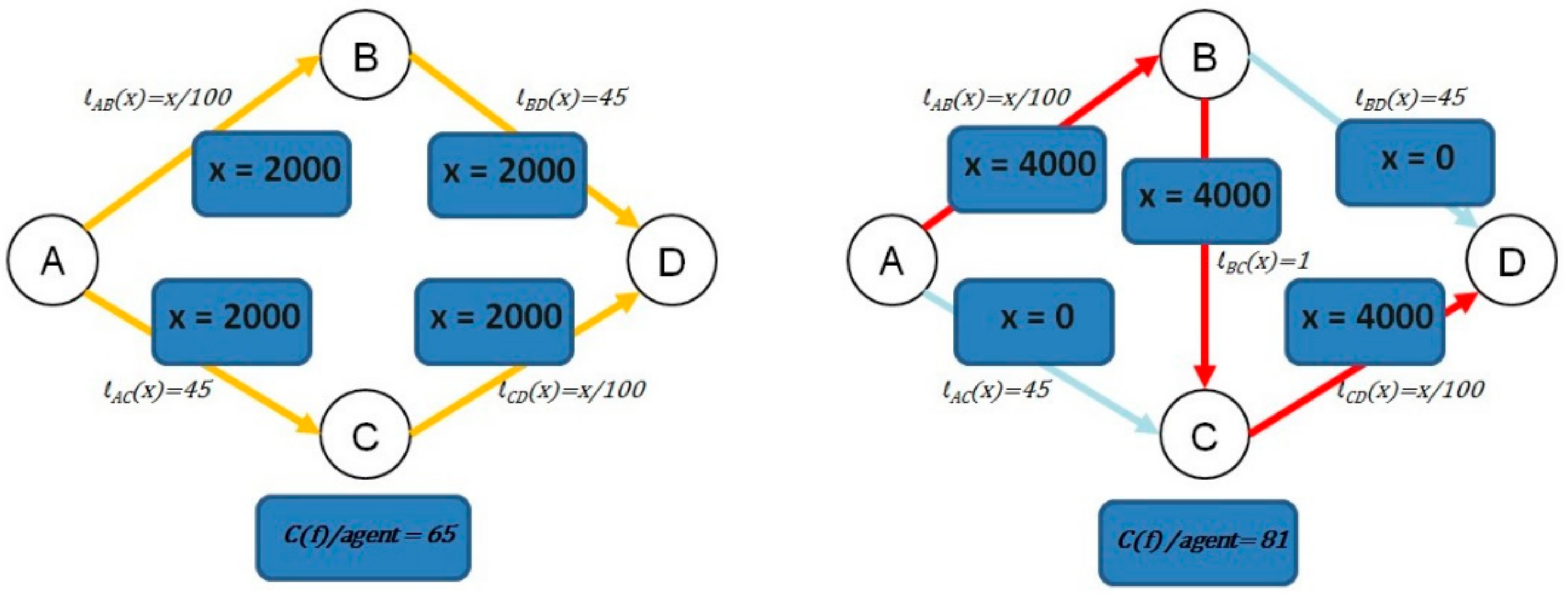
The Braess Paradox involves a non-intuitive outcome, associated with a traffic network, like that given in
Figure 1. For this network, all original road segments (non-dashed edges) suffer increasing congestion as traffic flow increases. In order to simulate traffic on the original network we assume 4000 agents traveling from node
A to node
D along the given edges. Considering the original network without the additional edge
eBC the players in the game will behave as players in a non-cooperative game. Hence, 2000 agents will take the path
P1 = {
A,
B,
D} and the remaining 2000 agents choose path
P2 = {
A,
C,
D} (see the left hand side of
Figure 2). The given result is a flow at Nash equilibrium [
25,
26,
27,
28], which indicates that each agent is behaving “greedily”, without regard to the overall cost of travel on the network. Hence, each player travels along the minimum latency path currently available, with respect to the flow created by the other players. If a flow is at Nash equilibrium for an instance (
G,
r,
l) assuming
and
with
then all used
si −
ti paths have equal total latency. In the example employed here, the overall latency (cost of flow)
C(
f) equals 260,000 units (or 65 units of delay per agent). If the additional edge with high capacity (i.e., low latency
lBC = 1) is added to the network, a flow at Nash equilibrium exists (assuming a non-cooperative game). The flow results in the following situation: All 4000 agents take the path
P3 = {
A,
B,
C,
D} (see the right hand side of
Figure 2, indicated by the red colored edges). The unique flow at equilibrium has a total cost
C(
f) which equals 324,000 units (or 81 units of delay per agent) [
7,
13,
26,
29]. Therefore, adding an additional edge and associated capacity can actually impede traffic flow rather than improve traffic flow, given that the agents act in a non-cooperative manner. This is an instance of Braess paradox.
Methodology to Evaluate the Effects of Cognitive Agents
To evaluate the effect of cognitive agents on Braess Paradox, we first introduce the concept of cognitive agents used in this work. After that, the evaluation approach is highlighted, which will incorporate varying levels of selfishness and uncertainty of travel times of the available paths from node A to D.
As opposed to non-cooperative games, where agents act in a strictly selfish manner, the approach presented here is comprised of cognitive agents. These agents are capable of making their own decisions based on their perceptions of the environment in which they act [
30,
31]. The concept of cognitive agents has been applied to wayfinding in built environments [
32,
33,
34,
35], and thus seems appropriate for traffic simulations as well. Hence, the agents in this work are able to make their own decisions while acting in the traffic network. In this work the reason for an agent’s decision is not a research focus, hence we just include simple cognitive abilities of the agent. Any agent is able to perceive the network status, i.e., congestion and latency, of a certain path (say by means of traffic news on a radio or by a navigation aid). In addition, an agent can decide their own action and choose a specific path to travel from node
A to
D. Therefore, the behavior of an agent has an effect on the other agents in terms of latency (and travel time). Of significant importance here is the fact that an agent’s decision does not necessarily have to be purely selfish, i.e., an agent may choose a path with a perceived higher latency (longer travel time), for whatever reason. Possible justifications for that behavior could be in personal preferences regarding the route choice, past experience that the route seems to be low in latency, toll roads/taxes (e.g., Reference [
36]), or assumptions that the agent has regarding the behavior of other agents in terms of prospective memory [
37].
In order to evaluate the effect of non-selfish behavior, different levels of selfishness are employed. This is represented by a parameter of non-selfishness probability PNS. The values of the parameter can range from 0 to 100, where 0 indicates that all decisions taken are selfish and 100 assumes that all decisions taken are of non-selfish nature. Usually probability levels have values from 0 to 1. In this paper, we use probability values multiplied by the factor 100, for the sake of readability. A PNS value of 50 means that there is a 50% probability that the decision of an agent will be non-selfish. Thus, the agents in the simulation may have selfish and non-selfish behavior. A non-selfish decision means, that the agent will not take the “obvious” faster path P3 = {A,B,C,D}, but chooses one of the “slower” paths P1 or P2, for whatever reasons. In order to evaluate the effect of non-selfish behavior, we have varied an agent’s probabilities of non-selfish decisions, from 0 to 100 in 5-unit steps—i.e., 0, 5, 10, …, 100.
Because agents in a traffic environment do not necessarily have accurate information on the status of traffic network, as discussed in
Section 1. Therefore, we include an uncertainty factor for travel times in our approach, as this fact leads to a certain degree of uncertainty when making decisions. In order to evaluate the influence of varying levels of uncertainty on the Braess Paradox and the group of agents, we added uncertainty in latency and travel time information, denoted as ∆
t, to the path
P3 = {
A,
B,
C,
D} in the network. Hence, the total latency with uncertainty at
P3 is denoted as
C0(
f). The calculation of
C0(
f) is defined in Equation (2),
where
is a randomized positive number of the closed interval [0,∆
t]. The ∆
t is assigned a value ranging from 0 to 100 in 10-unit steps—i.e., 0, 10, 20, …, 100, according to the level of uncertainty that is applied in a specific test simulation.
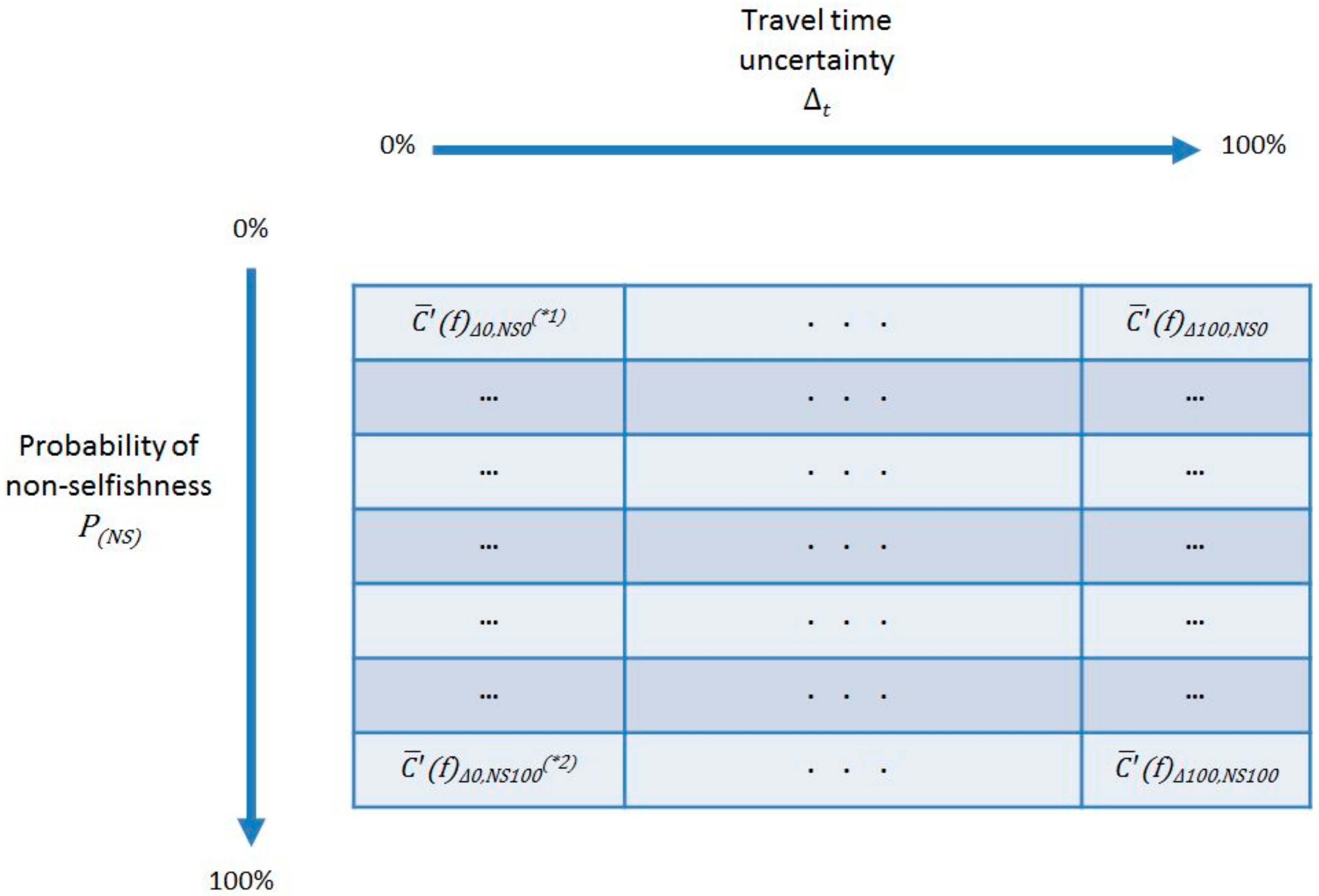
We have evaluated the impact of various levels of selfishness of the decisions of cognitive agents under varying levels of latency uncertainty by simulating the group of cognitive agents in traveling from the origin and the destination. For each combination of level of non-selfishness
PNS and uncertainty applied to latency of
P3, 5000 simulation runs were performed (see
Figure 3). In every simulation run 4000 agents have to travel from node
A to node
D, where they have to make decisions on the route taken based upon their cognitive and decision abilities. Overall, there are 231 combinations of
P(NS) and ∆
t. Given 5000 simulations for each distinct combination, there are 1,155,000 simulation runs. For each test run, we collected the following result variables: Total latency
C0(
f), the number of agents traversing edge
eAB, the number of agents traversing edge
eBD, the number of agents traversing edge
eAC, the number of agents traversing edge
eCD, the number of agents traversing edge
eBC, and the number of selfish and non-selfish decisions made. For each distinct combination of ∆
t and
P(NS) the variables collected in each of the 5000 simulation runs were statistically analyzed. Hence, the mean value, the standard deviation and variance of each result variable for each combination of ∆
t and
PNS was calculated.
4. Experimental Results
This section presents the results of the evaluation approach highlighted in the previous section. The computational results are given in respective tables, elaborating on the effect of cognitive agents with respect to the experiment settings. The results were obtained using the Repast Simphony framework [
38].
In
Figure 3, the variable name for total latency
value represents various levels of non-selfishness and travel time uncertainty. For example
denotes the total latency value that occurs when the uncertainty level is 10 and the non-selfishness probability is set at 100. This means that
represents delay incurred when the uncertainty in travel is at its lowest and when all agents’ decisions are selfish. The superscript (
∗1) denotes that the additional edge
BC is used, and superscript of (
∗2) denotes that the edge BC is not used. This means that
, marked with (
∗2), denotes
C(
f) of the flow at Nash equilibrium without edge
BC.
Our evaluation starts with the calculation of
C(
f) of the Nash flow on the original network i.e., without extra edge—and
Ce(
f) of the Nash flow of the extended network—i.e., with edge
BC. Based on these “anchors”, the variable conditions of uncertainty of travel times and variable probability levels of non-selfishness were tested. The calculation of
C(
f) and
Ce(
f) is done according to the methodology mentioned in
Section 3.1. Therefore, a non-cooperative game is created and evaluated until no agent can improve their individual situation by changing their behavior. Hence,
C(
f) results in 65 latency units per agent traveling from
A to
D, where 2000 agents traverse the edges
AB-
BD and the other 2000 agents choose
AC-
CD. For the network with the extra edge
BC (having low latency)
Ce(
f) results in 81 units of latency per agent. In this case all 4000 agents traverse the edges
AB-
BC-
CD. This paradox, of higher latency values due to an extra high capacity edge, is described in literature as Braess Paradox (e.g., Reference [
8]).
In
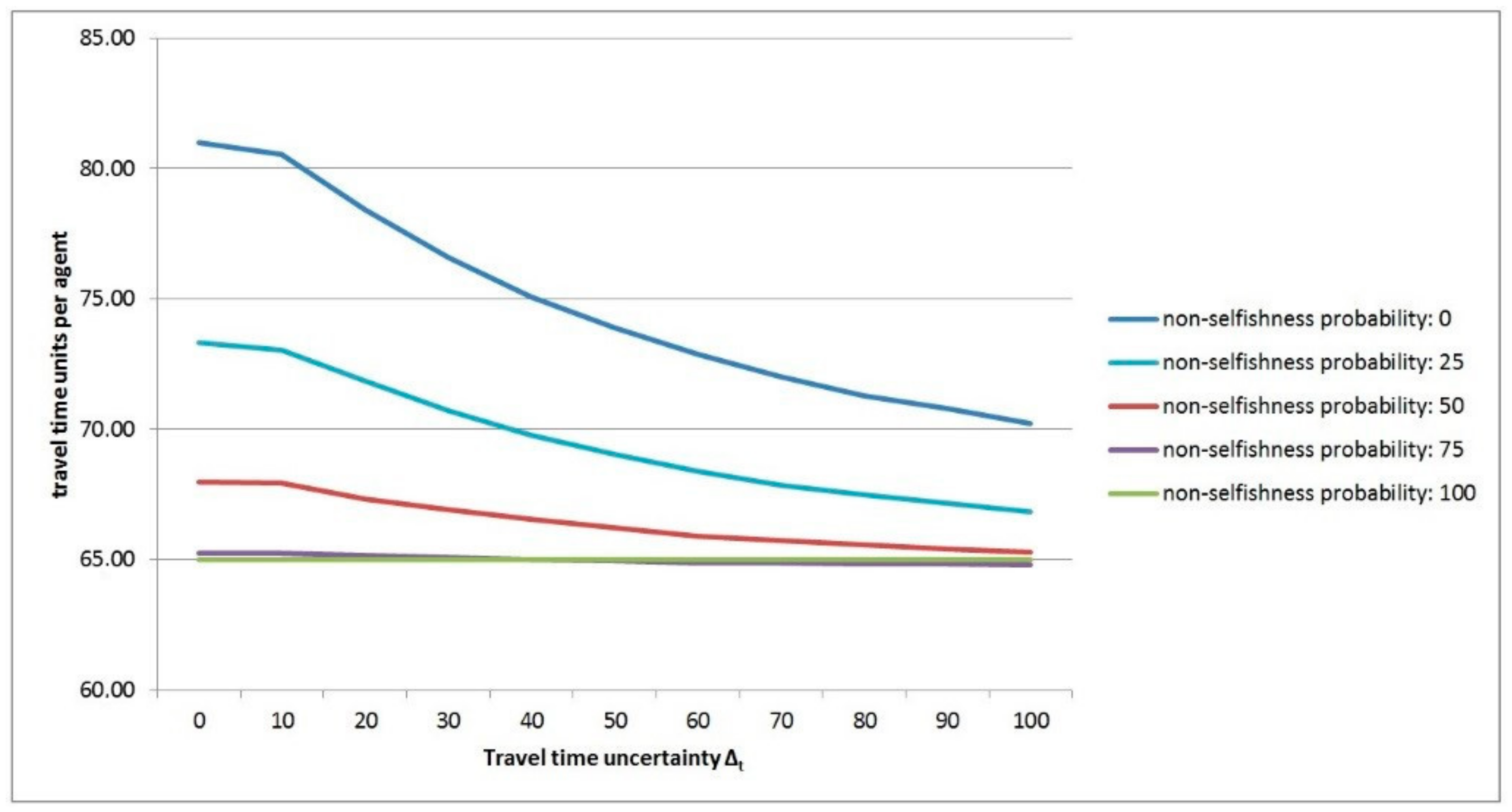
Table 1 the average latency values (i.e., total travel time over 5000 simulations) per agent are given for different levels of travel time uncertainty and probability of non-selfishness. The results indicate that the higher the level of uncertainty in terms of travel time ∆
t is, the lower is the latency or delay per agent (given a fixed probability of non-selfishness
P(NS)). This is depicted in
Figure 4 and
Table 1. Generally, the prior statement holds true except for the set of latency times highlighted in orange in
Table 2. The highlighted
values at a given
P(NS) level are the lowest calculated values for given ∆
t values. With increasing ∆
t the values of
increase. In
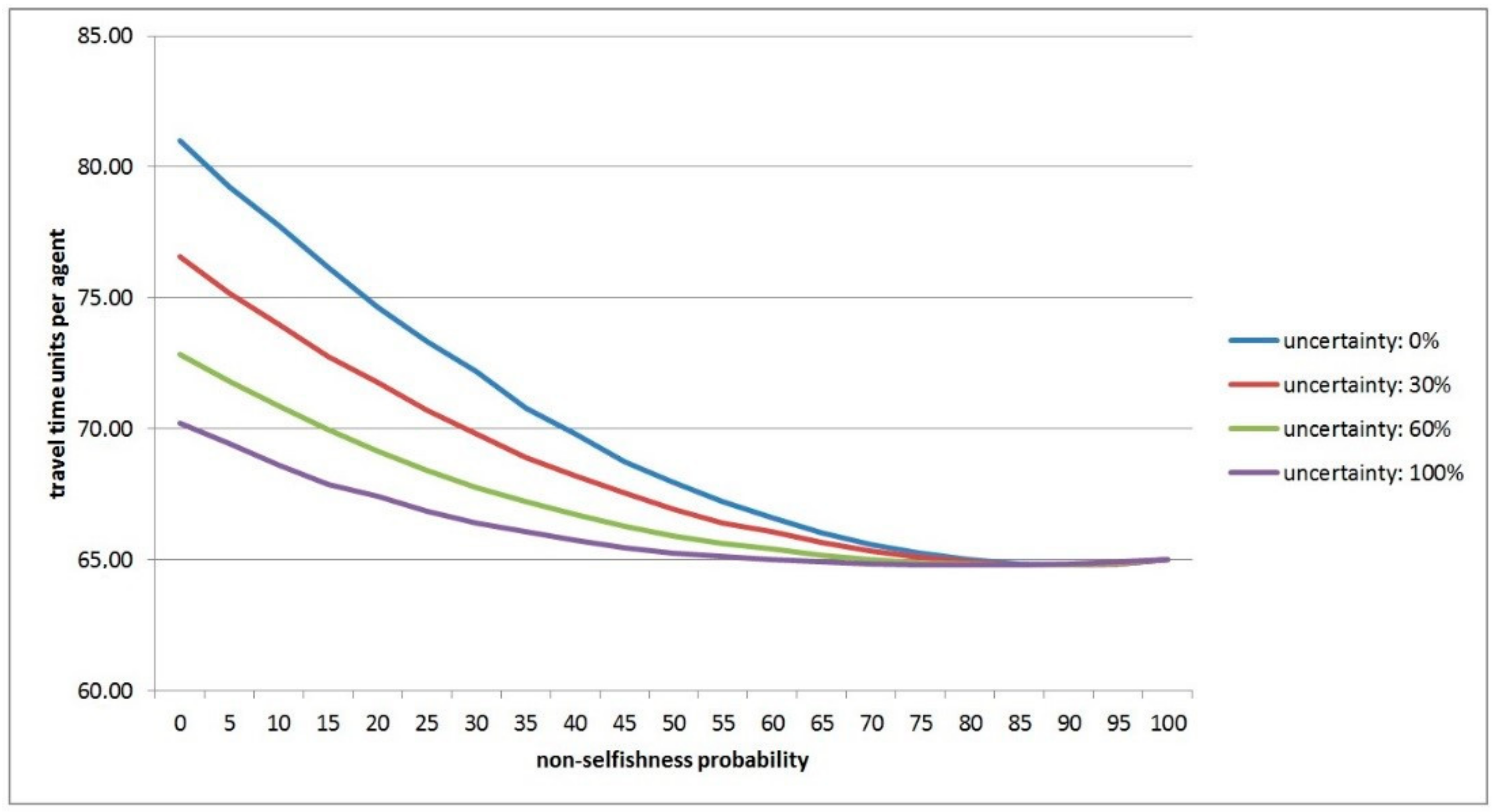
Figure 5 the behavior of latency values for varying
P(NS) with a given ∆
t value is depicted (see
Table 1 for numerical values). There, the latency values for ∆
t values 0, 30, 60, 100 are depicted, showing decreasing latency values per agent with increasing
P(NS). This monotonically decreasing behavior is present from
P(NS) levels 0 to 90 (for ∆
t ranging from 0–30), for
P(NS) levels 0 to 85 (for ∆
t ranging from 40–70), and for
P(NS) levels 0 to 80 (for ∆
t ranging from 80–100).
Both “anomalies”, depicted in
Table 2, describe the fact that, when all agents follow the Nash flow without the edge
BC, i.e., with latency
C(
f), then only a few agents choose to traverse edge
BC. Thus, the agents act purely selfish by avoiding the edge
BD with latency 45, which reduces latency for the agents (65 units verses 20 + 1 + (20 +
x)/100 where
x denotes the number of agents traversing edge
BC). Hence, in this particular experiment setting a small number of agents in traversing edge
BC can reduce the average latency per agent, which is depicted in
Figure 4 and
Figure 5 and
Table 2.
In order to justify the latency values of
Table 1—we show the number of agents traversing the respective edges in
Appendix A Table A1 for edges
AB and
CD, and in
Appendix A Table A2 for edges
BD and
AC.
Appendix A Table A3 lists the number of agents traversing edge
BC. These numbers are the basis for calculating the latency values given in
Table 1 in conjunction with the latency functions given in
Section 3.
In order to evaluate the stability in the number of agents traversing a certain edge the absolute standard deviation values and coefficient of variation have been computed. The coefficient of variation for edges AB and CD is between 0% and 31%, showing the highest variation coefficients at P(NS) values from 50 to 65 across all ∆t levels. In contrast to those numbers, the coefficient of variation for edges BD and AC are in the range between 8% and 395%, having decreasing coefficients of variation with higher P(NS) levels—except for P(NS) = 0. Hence, within the conducted test runs the standard deviation of edges BD and AC show higher values in comparison to AB and CD especially at low P(NS) and ∆t values. This is due to the fact that at low P(NS) and ∆t values edges BD and AC are not traversed by many agents, as most follow the path P3 = {A,B,C,D}. The coefficient of variation for edge BC ranges between 0% and 401% showing a high influence of P(NS) levels—i.e., increasing P(NS) leads to increasing variation.
In general, the coefficient of variation values reveals situations (i.e., distinct combinations of ∆t and P(NS)) which are volatile. Volatility in this context indicates test runs with high standard deviations, which in turn are unstable in terms of the number of traversing agents. Hence, a forecast or simulation of such situations is hardly possible, due to the variability of the system itself. For the experimental settings in this paper the edges AB and CD have an average coefficient of variation of 16% which is lower than the average coefficient of variation for edges BD and AC (53%). Hence, we can assume that the number of traversing agents of AB and CD are considered more stable than on AC and BD. For low ∆t values and low P(NS) levels coefficient of variation for edges AC and BD show especially high volatility due to the fact that the number of agents traversing these edges is low. The edge BC also shows unstable behavior in the test runs where the path P3 is seldom traversed.
The influence of the two variables ∆
t and
P(NS) on the average travel time per agent is also worth evaluating. In general, both variables have an influence on
per agent, while
P(NS) has a greater impact on
per agent, than ∆
t. This is justified by the numerical values given in
Table 1, and by the correlation coefficients given in
Table 3 and
Table 4. In the tables the dependence of the latency values on the variables ∆
t and
P(NS) is given, where
Table 4 indicates that
P(NS) has higher impact on the
values due to higher correlation coefficients in comparison to
Table 3.
On a global level the results reveal that the fastest route for an individual (i.e., shortest path in terms of travel time) does not necessarily have to be the fastest route for a group of people and for the individual itself, with respect to a defined network with latency functions. This is due to the behavior of other agents of the group and the latency due to the traffic volume on each edge, which is mentioned in Roughgarden [
7]. Braess [
8] and Roughgarden et al. [
26] assume that each agent in the routing game acts in a strictly selfish manner, which results in the Braess Paradox. Therefore, if any player in a traffic situation would be equipped with a navigation system and would strictly follow the instructions of the navigation device the Braess Paradox is likely to occur. Thus, each member of the group travels with higher latency than without an extra high-capacity road present in the network. Roughgarden [
7] mentions that the Price of Anarchy in networks with linear latency functions is at most 4/3. Of particular interest is that individual shortest paths do not necessarily lead to an “optimal” flow in the network if everyone acts selfish.
Nevertheless, if we consider real-world situations where agents in a network have uncertain information on the status of the network, they may act differently. Therefore, agents can make non-selfish decisions and take the longer path in terms of latency due to their preferences or their assumptions/view/information on the traffic situation. This behavior reduces the latency in the network, which is depicted in
Table 1 and
Table 2. Thus, in situations where a small number of agents travel on P
3 the travel latency per agent is actually lower than in the network without the extra edge (see
Figure 4 and
Figure 5 and
Table 1 and
Table 2).
In that context, there is a possible impact on an Intelligent Transportation System (ITS) that tries to influence the decisions of agents which would result in an “optimal” flow. This could be realized by edge removal or with a special tax applied to high-capacity roads (see Reference [
36]) or with “recommendations” for agents delivered by the navigation system. In addition, an agent could get rewards for taking detours (i.e., the longer path in terms of travel time). In Reference [
36] the authors argue that the maximum benefit of taxes in networks with linear latency functions is 4/3, and with arbitrary latency functions is n/2, where n denotes the number of nodes in the network. The results here suggest that an approach to provide the agents in a traffic network with recommendations for the “optimal” paths that lead to the least global traffic latency, could easily be comprised by real-time communications that are directed to navigation systems (e.g., by utilizing the traffic message channel).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




