3.3. ULS Platform and Processing
The ULS platform used for this survey was a Phoenix Lidar Systems MiniRanger ULS (
Figure 4). This platform comprised of a DJI Matrice M600 Pro UAV equipped with a Riegl miniVUX laser scanner, Northrop Grumman uIMU, custom GNSS unit, and a Basler acA4096gc aerial camera, which concurrently collected photographic RGB imagery with the lidar data.
Figure 4 and
Table 2 summarize this platform’s specifications and flight parameters. Due to the significant slope of the terrain, substantial area of the tall tree canopy, and other topographic factors, a flight altitude of 100 m above ground level (AGL) was used, with a forward velocity of 6 m/s. These two flight parameters together have a direct effect on the resulting data product in terms of point spacing and density. It is important to note that the implemented acquisition altitude of 100 m AGL is the maximum altitude recommended by the ULS manufacturer but was required to clear tree canopy and efficiently survey the area of interest. Significant lateral and side overlap were desired at 70% and 80%, respectively, in order to limit data gaps from the dense vegetation and facilitate the registration process. Note that the 80% sidelap assumes the field of view (FOV) of the ULS sensor is 60° rather than the actual value of 360° in planning to account for blockage from trees and the fact that more dense/accurate data will be collected within a much smaller field of view. As the FOV increases it is expected that the total number of point returns to the sensor will begin to decrease due to the increase in range to the surface. Based on these flight parameters the distance between successive swaths was approximately 50 m and the resulting point cloud spacing was estimated to be 24.20 points per square meter.
Manufacturer standard operating procedures were followed during the flights. Static GNSS data were logged for at least 5 min before and after each flight. Kinematic alignment was typically obtained through at least two “figure 8” flight patterns on the front and back of the flight unless there was insufficient battery life remaining. Individual swaths were limited to 1 km in length, and the collection time was limited to 14 min in addition to the time required for the in-flight calibration procedure.
The ULS trajectory combining the INS and GNSS observations was processed in Inertial Explorer 8.70 software. Inertial Explorer provides built-in profiles for aerial, UAV, pedestrian, and ground vehicle and marine applications, of which the UAV profile was used for this project. The GNSS and INS data were processed simultaneously in the forward and reverse directions in time using differential GNSS measurements between the base and ULS GNSS unit. The ULS survey data were processed against the same GNSS base station used for the TLS and total station surveys.
Both the loosely coupled and tightly coupled solutions were analyzed in multiple iterations. For the loosely coupled solution, the PPK GNSS data were processed first and separately. The updated position and velocity information were then processed with the INS data, and a corrected trajectory (updated position, velocity, and attitude) was produced. The tightly coupled solution processes the GNSS data with the INS data to produce the corrected trajectory. For both solutions, the static and kinematic calibrations performed during data acquisition were considered, but more weight can be given to one or the other—with an extreme case being the elimination of the static or kinematic calibration data—to help reduce the influence of noise or poor-quality data. Adjusting the weight given to the kinematic and static calibration in the Kalman filtering, and considering both tightly and loosely coupled solutions, processed trajectories were iteratively analyzed until a best solution was achieved, with best defined by the solution with the least amount of deviation between the forward and reverse solutions, and lowest relative error. The minimum standard was to produce a solution with a combined positional separation of less than +/−2 cm and combined attitude separation of less than +/−2 arcmins in time.
The point cloud was then constructed from the corrected trajectory combined with the lidar range and angular observations. The captured images were processed using the Phoenix LiDAR Systems processing software, Spatial Explorer 4.0.3. The lidar data was fused with RGB values typically within 250 m of the ULS location, allowing color from photographs taken in adjacent swaths to be considered in coloring the point cloud. Lidar data was then split by swath and exported in ASPRS las format, and extraneous data collected before or after the swaths were completed, or in between swaths when the ULS was turning, were separately exported for more rigorous quality control.
Initially, data were processed in Inertial Explorer and Spatial Explorer using per flight computed lever arms (representing the offsets between the ULS IMU center and ULS scanner origin) followed by a swath adjustment in Terrasolid TerraMatch software. However, current swath adjustment algorithms are based on ALS data collected from large swaths where many intersecting planar features are used to extract matching tie lines. When attempting to perform this on ULS data, it was found that there were relatively few, if any, well-defined matching features between swaths. As a result, the swath adjustment results did not help improve consistency and thus were not used. Instead, the manufacturer calibrated lever arms (MCLA) were used, along with a –90-degree rotation about the Z-axis to complete the coordinate transform. The lever arm values used were 0.000, –0.105, and 0.395 m in the X, Y, and Z directions, respectively.
3.4. Ground Filtering and DEM Creation
The data were ground filtered using a custom ground filter developed by the research team. This ground filter performs progressive refinement by starting with a coarse cell size (10.0 m) and iteratively refines the model to the desired cell size (0.5 m). At the onset, a coarse raster is created by finding the median value of the points within each cell. A focal operator returning the median value of cells within a window (3 by 3) surrounding a center cell is then applied to each cell to minimize noise from artificially low points. A normal vector is then estimated for each cell and points within a threshold distance (0.5 multiplied by the cell size of the current iteration) of a plane derived from that normal vector and the centroid of the cell are then kept for the next iteration. Points within the threshold are classified as ground. Points further than twice the threshold are not considered in subsequent refinement stages. Points in between are marked as unclassified. The process is iterated by linearly interpolating between the coarse and fine cell sizes, median window sizes, and thresholds. For estimating the median value for each cell, only points classified as ground points are used.
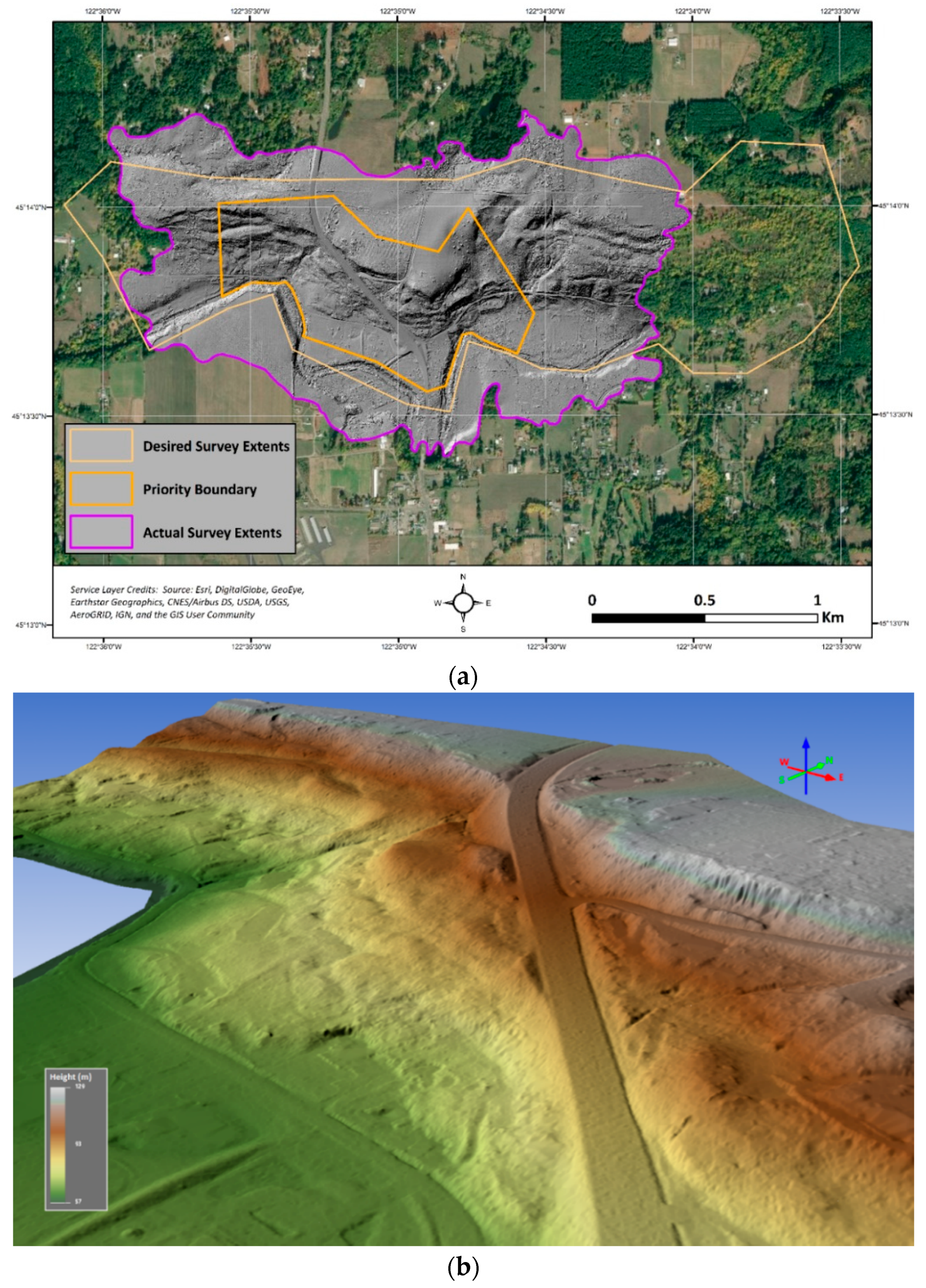
Following this operation, a preliminary DEM was created as a Delaunay triangulation of the centroids of all ground points located within each cell. Only points within 5 cm of this model were then given a final classification as ground and everything else was unclassified. Next, minor manual cleanup was performed at locations such as the edges of the study area where the ground filter did not work as well. A final DEM (
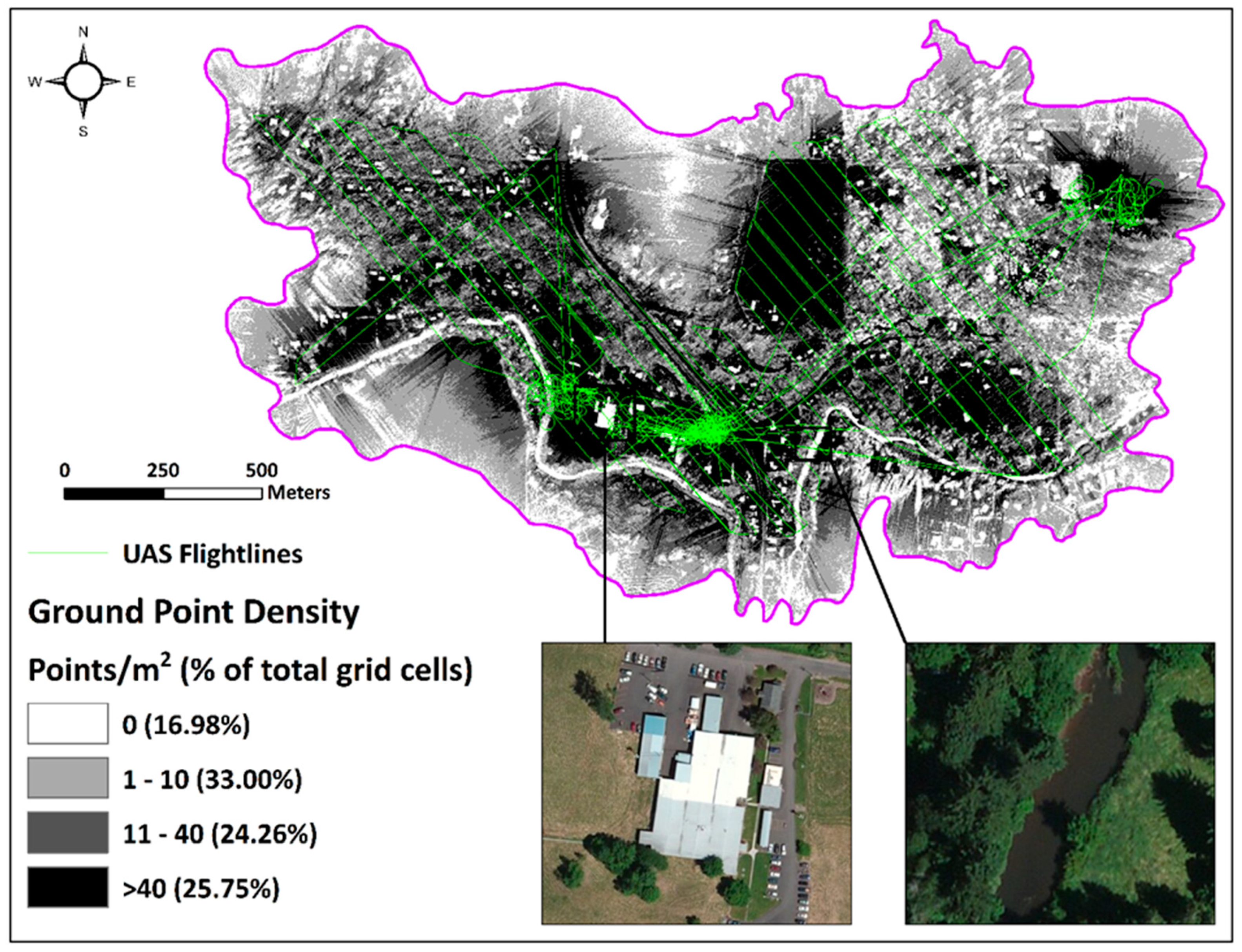
Figure 5) was created as the rasterization of the average Z coordinates of all of the ground points within each cell. This process helps minimize noise in the final model through the averaging process. In the end, a 0.5 m bare earth DEM was produced. This overall ground filtering process was iteratively refined in order to find the optimal cell size for this particular study area. While other studies have achieved higher resolution DEMs with ULS, it can be challenging to capture sufficient ground points in the dense forests on steep terrain, which is common in the Pacific Northwest of North America. Other studies achieving higher resolution results focus on smaller study areas, less terrain relief, and/or have much less tree canopy and lower story vegetation overall.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}