Comparison of GNSS-, TLS- and Different Altitude UAV-Generated Datasets on the Basis of Spatial Differences


Abstract
:
1. Introduction
2. Materials and Methods
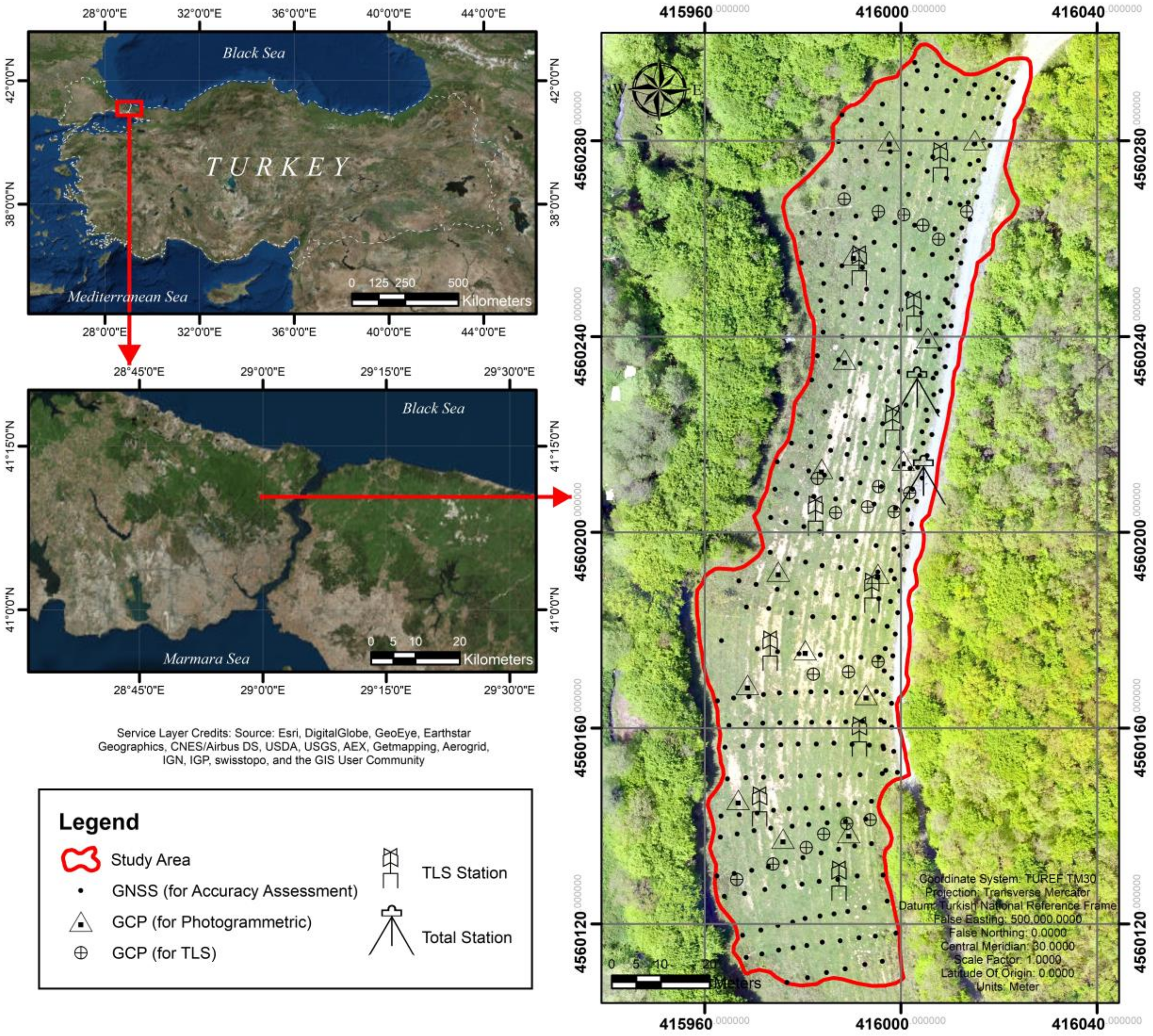
2.1. Study Area
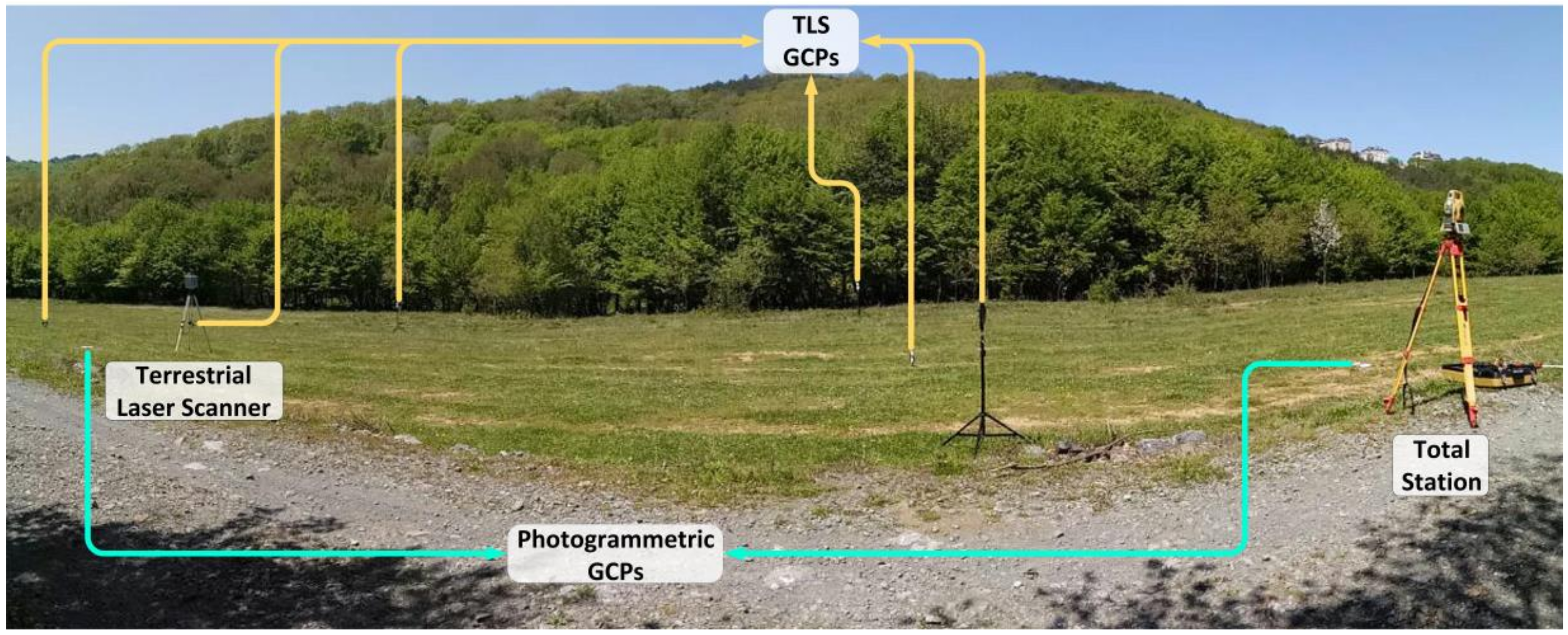
2.2. Data Acquisitions
2.3. Data-Processing and Accuracy Assessment Procedures
3. Results
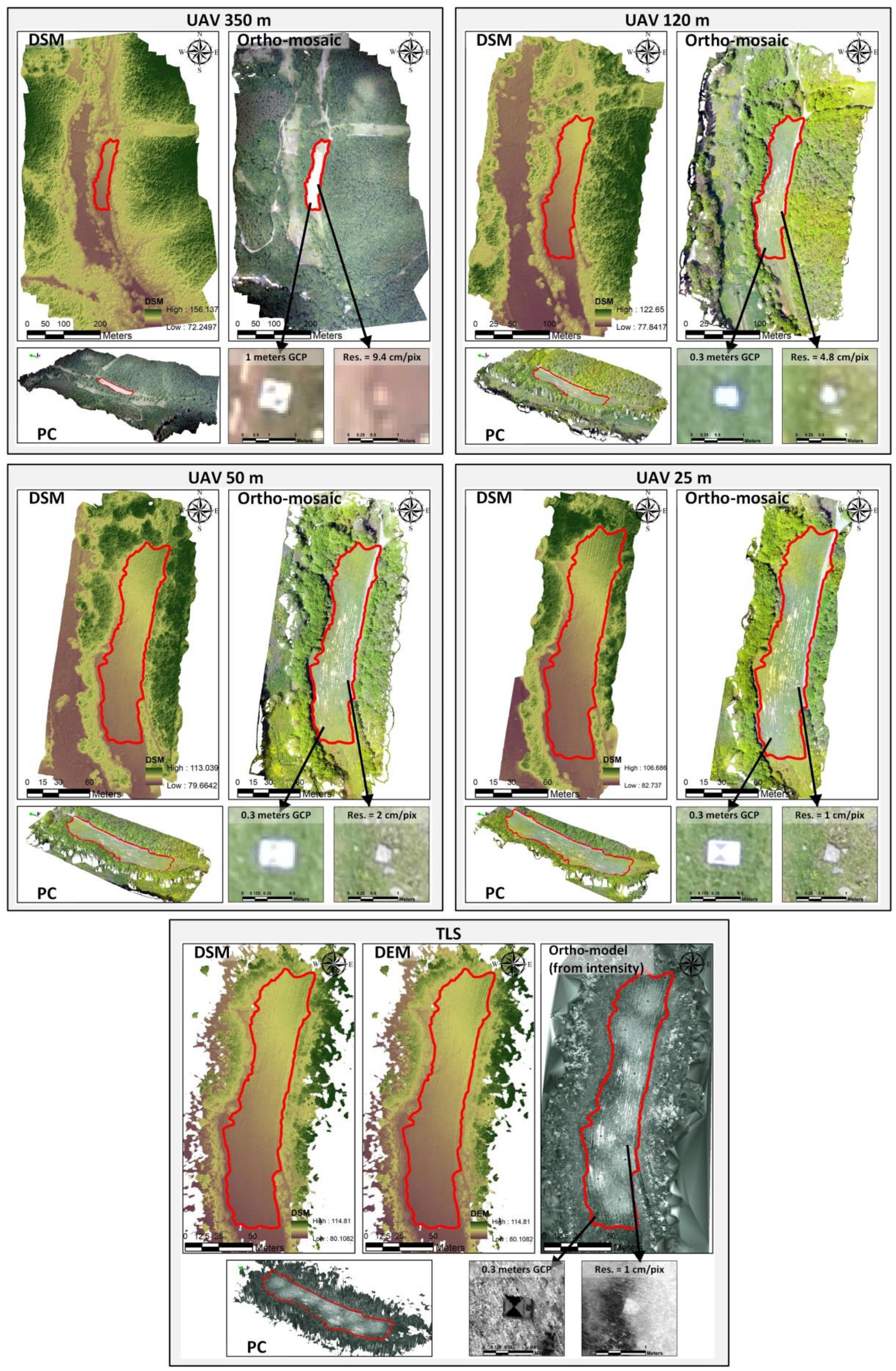
3.1. Data Processing Results
3.2. Accuracy Assessment Results
3.2.1. Point-Based Analysis
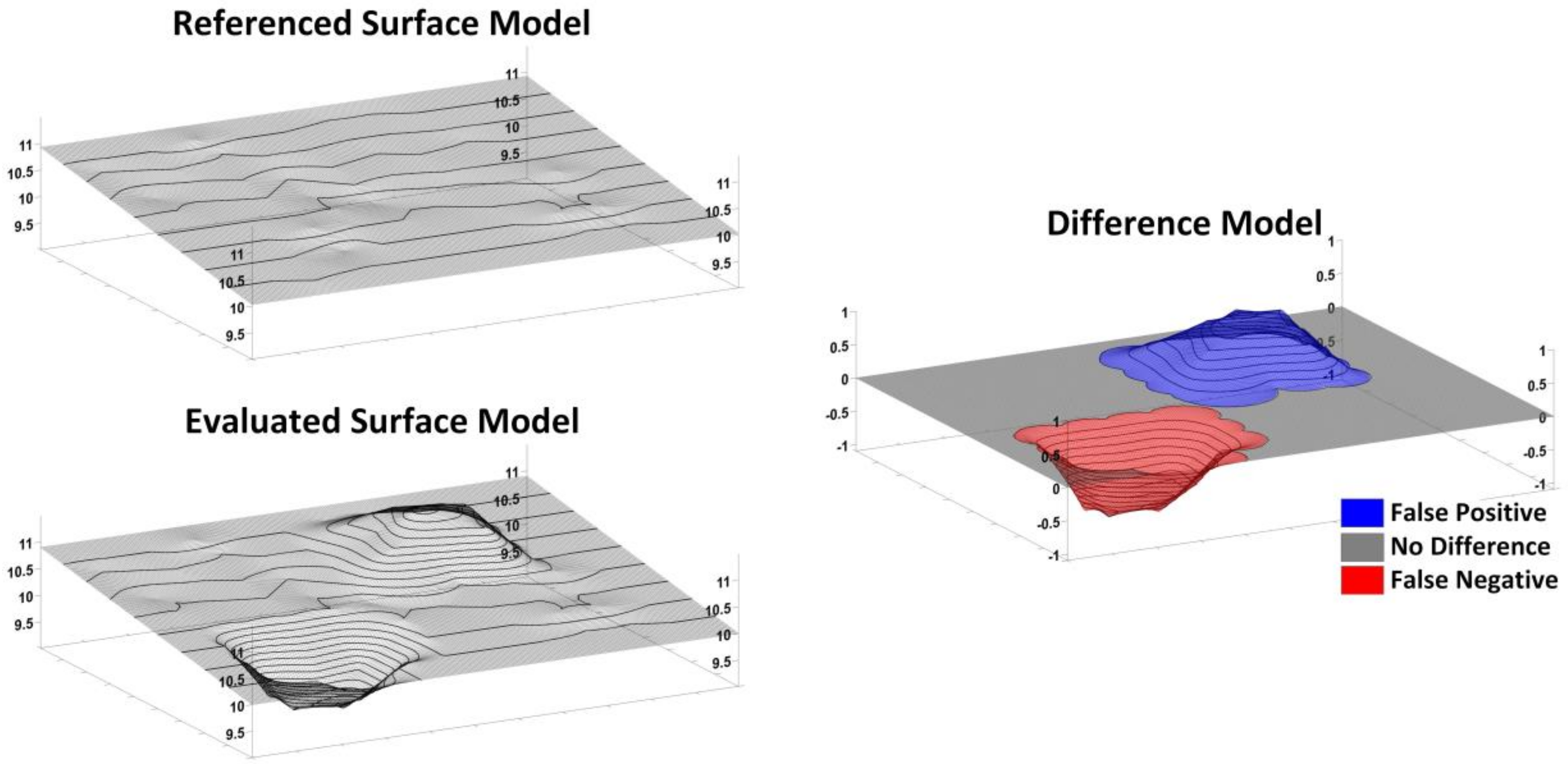
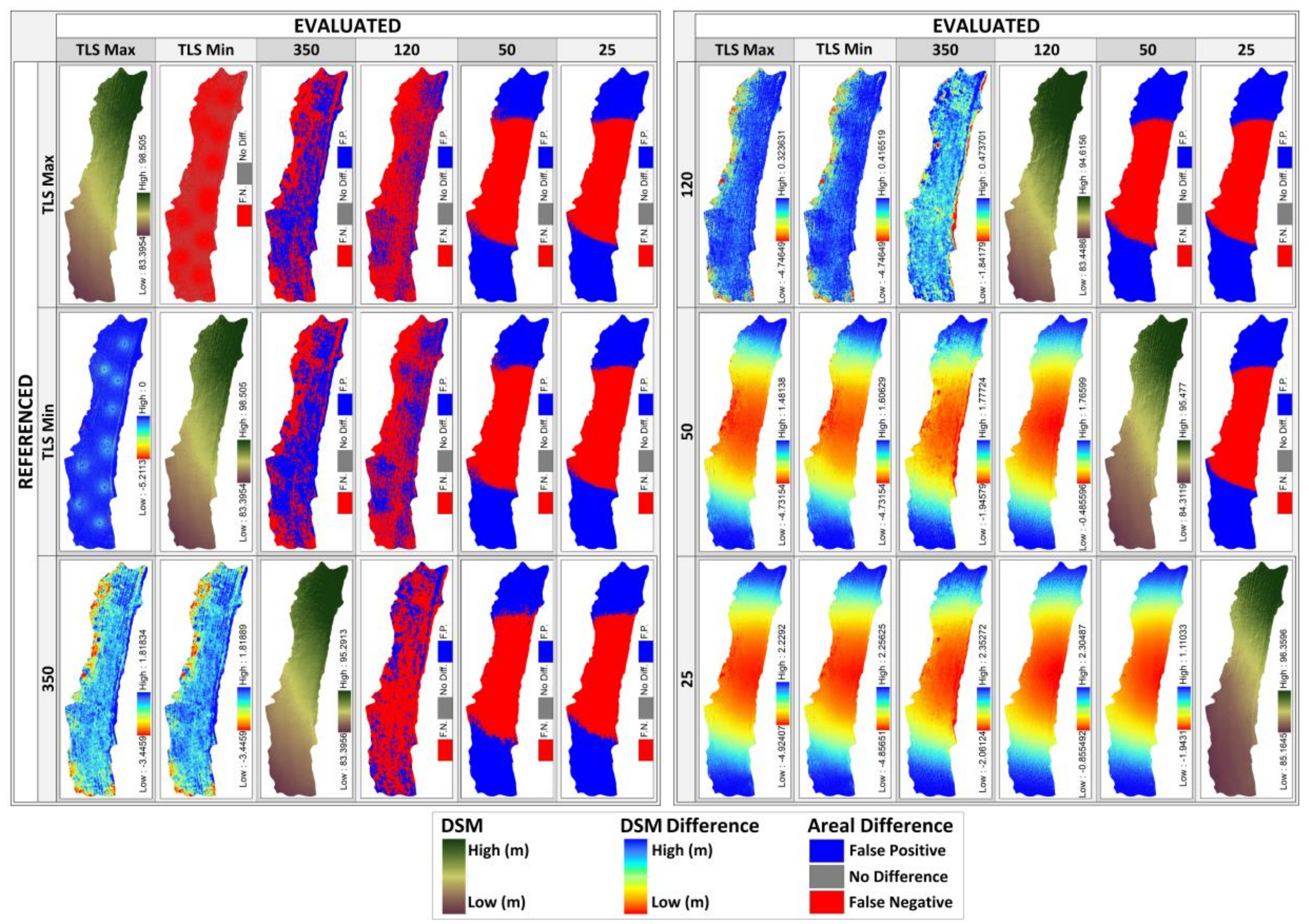
3.2.2. Areal and Volumetric Analysis
3.3. Experimental Doming Modeling
4. Discussion
5. Conclusions
Supplementary Materials
Funding
Acknowledgments
Conflicts of Interest
References
- Ghilani, C.D.; Wolf, P.R. Elementary Surveying: An Introduction to Geomatics, 13th ed.; Pearson Education: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Li, Z.; Zhu, Q.; Gold, C. Digital Terrain Modeling: Principles and Methodology; CRC Press: New York, NY, USA, 2005; p. xvi. 323p. [Google Scholar]
- Lillesand, T.; Kiefer, R.W.; Chipman, J. Remote Sensing and Image Interpretation, 7th ed.; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Mechelke, K.; Kersten, T.P.; Lindstaedt, M. Comparative investigations into the accuracy behaviour of the new generation of terrestrial laser scanning systems. In Proceedings of the 8th Conference on Optical 3-D Measurement Techniques, Zürich, Germany, 9–12 July 2007; pp. 319–327. [Google Scholar]
- Kersten, T.P.; Mechelke, K.; Lindstaedt, M.; Sternberg, H. Methods for Geometric Accuracy Investigations of Terrestrial Laser Scanning Systems. Photogramm. Fernerkund. Geoinf. 2009, 2009, 301–315. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Yang, G.; Li, C.; Wang, Y.; Yuan, H.; Feng, H.; Xu, B.; Yang, X. The DOM Generation and Precise Radiometric Calibration of a UAV-Mounted Miniature Snapshot Hyperspectral Imager. Remote Sens. 2017, 9, 642. [Google Scholar] [CrossRef]
- Khaghani, M.; Skaloud, J. Autonomous Vehicle Dynamic Model-Based Navigation for Small UAVs. J. Inst. Navig. 2016, 63, 345–358. [Google Scholar] [CrossRef]
- Vetrella, A.; Fasano, G.; Accardo, D.; Moccia, A. Differential GNSS and Vision-Based Tracking to Improve Navigation Performance in Cooperative Multi-UAV Systems. Sensors 2016, 16, 2164. [Google Scholar] [CrossRef]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality assessment of combined IMU/GNSS data for direct georeferencing in the context of UAV-based mapping. Int. Arch. Photogramm. 2017, XLII-2/W6, 355–361. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy Analysis of Photogrammetric UAV Image Blocks: Influence of Onboard RTK-GNSS and Cross Flight Patterns. Photogramm. Fernerkund. Geoinf. 2016, 2016, 17–30. [Google Scholar] [CrossRef]
- Leitão, J.P.; De Vitry, M.M.; Scheidegger, A.; Rieckermann, J. Assessing the quality of digital elevation models obtained from mini unmanned aerial vehicles for overland flow modelling in urban areas. Hydrol. Earth Syst. Sci. 2016, 20, 1637–1653. [Google Scholar] [CrossRef]
- Rock, G.; Ries, J.; Udelhoven, T. Sensitivity analysis of UAV-photogrammetry for creating digital elevation models (DEM). In Proceedings of the Conference on Unmanned Aerial Vehicle in Geomatics, Zurich, Switzerland, 14–16 September 2011. [Google Scholar]
- Mesas-Carrascosa, F.-J.; Notario García, M.; Meroño de Larriva, J.; García-Ferrer, A. An Analysis of the Influence of Flight Parameters in the Generation of Unmanned Aerial Vehicle (UAV) Orthomosaicks to Survey Archaeological Areas. Sensors 2016, 16, 1838. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, W. On-Board GNSS/IMU Assisted Feature Extraction and Matching for Oblique UAV Images. Remote Sens. 2017, 9, 813. [Google Scholar] [CrossRef]
- Kääb, A.; Girod, L.; Berthling, I. Surface kinematics of periglacial sorted circles using structure-from-motion technology. Cryosphere 2014, 8, 1041–1056. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Smith, M.; Carrivick, J.; Quincey, D.; Carrivick, J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. Earth Environ. 2015, 40, 247–275. [Google Scholar] [CrossRef]
- Kraus, K. Photogrammetry: Geometry from Images and Laser Scans, 2nd ed.; Walter de Gruyter: Berlin, Germany, 2007. [Google Scholar]
- Yan, L.; Fei, L.; Chen, C.; Ye, Z.; Zhu, R. A Multi-View Dense Image Matching Method for High-Resolution Aerial Imagery Based on a Graph Network. Remote Sens. 2016, 8, 799. [Google Scholar] [CrossRef]
- Yanagi, H.; Chikatsu, H. Performance evaluation of 3D modeling software for UAV photogrammetry. Int. Arch. Photogramm. 2016, XLI-B5, 147–152. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Polat, N.; Uysal, M. An Experimental Analysis of Digital Elevation Models Generated with Lidar Data and UAV Photogrammetry. J. Indian Soc. Remote Sens. 2018, 46, 1135–1142. [Google Scholar] [CrossRef]
- Kršák, B.; Blišťan, P.; Pauliková, A.; Puškárová, P.; Kovanič, Ľ.; Palková, J.; Zelizňaková, V. Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 2016, 91, 276–287. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from Motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- James, M.; Robson, S.; D’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Leberl, F.; Irschara, A.; Pock, T.; Meixner, P.; Gruber, M.; Scholz, S.; Wiechert, A. Point Clouds: Lidar versus 3D Vision. Photogramm. Eng. Remote Sens. 2010, 76, 1123–1134. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Vericat, D.; Smith, M.W. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from Structure-from-Motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- Tonkin, T.; Midgley, N. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Wackrow, R.; Chandler, J.H. Minimising systematic error surfaces in digital elevation models using oblique convergent imagery. Photogramm. Rec. 2011, 26, 16–31. [Google Scholar] [CrossRef]
- Wackrow, R.; Chandler, J.H. A convergent image configuration for DEM extraction that minimises the systematic effects caused by an inaccurate lens model. Photogramm. Rec. 2008, 23, 6–18. [Google Scholar] [CrossRef]
- Magri, L.; Toldo, R. Bending the doming effect in structure from motion reconstructions through bundle adjustment. Int. Arch. Photogramm. 2017, XLII-2/W6, 235–241. [Google Scholar] [CrossRef]
- Turkish Directorate General of Civil Aviation. Unmanned Aerial Systems Directive, 2nd ed.; Ministry of Transport and Infrastructure: Ankara, Turkey, 2017; p. 35.
- Federal Aviation Administration. Operation and Certification of Small Unmanned Aircraft Systems; FAA-2015-0150-4721; Department of Transportation: Washington, DC, USA, 2016; p. 152.
- Civil Aviation Administration of China. Civil Drone Driver Management Regulations; AC-61-FS-2016-20R1; The State Council the People’s Republic of China: Beijing, China, 2016; p. 12.
- Civil Aviation Authority. Air Navigation (Amendment) Order 2018—Guidance for Small Unmanned Aircraft Users; CAP1687; United Kingdom Government: London, UK, 2018; p. 16.
- Civil Aviation Safety Authority. Remotely Piloted Aircraft Systems—Operation of Excluded RPA; AC 101-10v1.3; Australian Government: Canberra, Australia, 2018; p. 32.
- Zhou, Q.; Lees, B.; Tang, G. Advances in Digital Terrain Analysis; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Wilson, J.P.; Gallant, J.C. Terrain Analysis: Principles and Applications; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Wilson, J.P.; Fotheringham, A.S. The Handbook of Geographic Information Science; Blackwell Pub.: Malden, MA, USA, 2008. [Google Scholar]
- Akima, H. A Method of Bivariate Interpolation and Smooth Surface Fitting for Irregularly Distributed Data Points. ACM Trans. Math. Softw. 1978, 4, 148–159. [Google Scholar] [CrossRef]
- Hengl, T. Finding the right pixel size. Comput. Geosci. 2006, 32, 1283–1298. [Google Scholar] [CrossRef]
- Bater, C.W.; Coops, N.C. Evaluating error associated with lidar-derived DEM interpolation. Comput. Geosci. 2009, 35, 289–300. [Google Scholar] [CrossRef]
- Briggs, I.C. Machine contouring using minimum curvature. Geophysics 1974, 39, 39–48. [Google Scholar] [CrossRef]
- Fortune, S. A sweepline algorithm for Voronoi diagrams. Algorithmica 1987, 2, 153–174. [Google Scholar] [CrossRef]
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Hutchinson, M. A new procedure for gridding elevation and stream line data with automatic removal of spurious pits. J. Hydrol. 1989, 106, 211–232. [Google Scholar] [CrossRef]
- Hutchinson, M.; Bischof, R. A new method for estimating the spatial distribution of mean seasonal and annual rainfall applied to the Hunter Valley, New South Wales. Aust. Meteorol. Mag. 1983, 31, 179–184. [Google Scholar]
- Makarovic, B. Regressive rejection—A digital data compression technique. In Proceedings of the ASP/ACSM Fall Technical Meeting, Little Rock, AR, USA, 18–21 October 1977. [Google Scholar]
- Makarovic, B. Structures for geo-information and their application in selective sampling for digital terrain models. ITC J. 1984, 4, 285–295. [Google Scholar]
- Mitas, L.; Mitasova, H. Spatial interpolation. In Geographical Information Systems: Principles, Techniques, Management and Applications; Longley, P., Goodchild, M.F., Maguire, D.J., Rhind, D.W., Eds.; Wiley: New York, NY, USA, 1999; Volume 1, pp. 481–492. [Google Scholar]
- Watson, D.F. Contouring: A Guide to the Analysis and Display of Spatial Data; Pergamon Press: Oxford, UK, 1992. [Google Scholar]
- Zimmerman, D.; Pavlik, C.; Ruggles, A.; Armstrong, M.P. An Experimental Comparison of Ordinary and Universal Kriging and Inverse Distance Weighting. Math. Geol. 1999, 31, 375–390. [Google Scholar] [CrossRef]
- Caruso, C.; Quarta, F. Interpolation methods comparison. Comput. Math. Appl. 1998, 35, 109–126. [Google Scholar] [CrossRef]
- O’Sullivan, D.; Unwin, D. Geographic Information Analysis; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Tobler, W.R. A computer movie simulating urban growth in the Detroit region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Andrew, M.; Indresan, G.; Malcolm, P.; Trevor, C. Contributions to the experimental validation of the discrete element method applied to tumbling mills. Eng. Comput. 2004, 21, 119–136. [Google Scholar] [CrossRef]
- Powell, M.S.; McBride, A.T. What is required from DEM simulations to model breakage in mills? Miner. Eng. 2006, 19, 1013–1021. [Google Scholar] [CrossRef]
- Höhle, J.; Höhle, M. Accuracy assessment of digital elevation models by means of robust statistical methods. ISPRS J. Photogramm. 2009, 64, 398–406. [Google Scholar] [CrossRef]
- Senseman, G.M.; Bagley, C.F.; Tweddale, S.A. Accuracy Assessment of the Discrete Classification of Remotely-Sensed Digital Data for Landcover Mapping; Construction Engineering Research Laboratories (Army): Champaign, IL, USA, 1995. [Google Scholar]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the Accuracy of High Resolution Digital Surface Models Computed by PhotoScan® and MicMac® in Sub-Optimal Survey Conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]
- Barbasiewicz, A.; Widerski, T.; Daliga, K. The analysis of the accuracy of spatial models using photogrammetric software: Agisoft Photoscan and Pix4D. E3S Web Conf. 2018, 26, 12. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1979, 203, 405–426. [Google Scholar]
- Weng, J.; Huang, T.S.; Ahuja, N. Motion and Structure from Image Sequences; Springer: Berlin, Germany, 1993. [Google Scholar]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of topographic variability and lidar sampling density on several DEM interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Kim, S.; Rhee, S.; Kim, T. Digital Surface Model Interpolation Based on 3D Mesh Models. Remote Sens. 2018, 11, 24. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Trimble UX5 | DJI Phantom 3 Advanced |
|---|---|---|
| Platform Type | Fixed Wing | Multicopter |
| Purpose | Mapping | Hobby, photography, videography |
| Takeoff-Landing | Takeoff: Catapult launch Landing: Belly (Min. 50 m × 30 m open area for landing) | Vertical takeoff and landing |
| Cruise Altitude (from Takeoff Location) (Min—Max) | Min.: 75 m Max.: 750 m | (Mapping purpose autonomous flight) Min.: 10 m Max.: 500 m |
| Endurance | 50 min. | 23 min. |
| Max Operation Distance | 5000 m | 3500 m |
| Cruise speed | 80 km/h | Min.: 0 km/h Max.: 57 km/h |
| Camera Properties | Fixed RGB or NIRRG Sony Nex5T mirrorless APSC Res.: 4912 × 3264 pixels (16MP) FOV: 84° Focal Lenght: 15.517 mm Pixel Length: 4.75 micron | RGB with Gimbal Res.: 4000 × 3000 pixels (12MP) FOV: 94° Focal Lenght: 3.61 mm Pixel Length: 1.56 micron |
| Positional Data Recording | L1 GNSS (X, Y, Z Coor.) IMU (Yaw, Pitch, Roll Angles) | L1 GNSS (X, Y, Z Coor.) |
| Cost (Approximately in Turkey) | 65,000 USD | 1000 USD |
| Flight Altitude | UAV Platform | Overlap Ratios (% Forward—% Side) | Number of Photos | Flight Duration | Total 3D Model Area (m2) |
|---|---|---|---|---|---|
| 25 m | DJI Phantom 3 Advanced | 95–95% | 483 | 21 min | 19,610.60 |
| 50 m | DJI Phantom 3 Advanced | 95–95% | 344 | 15 min | 33,898.84 |
| 120 m | DJI Phantom 3 Advanced | 95–95% | 94 | 5 min | 81,870.75 |
| 350 m | Trimble UX5 | 80–80% | 42 | 6 min | 371,640.92 |
| Dataset | Ortho-Mosaic Resolution (m) | Total Point Count inside the Study Area | Point Density (Point/m2) | Calculated Resolution from Equation (1) (m) | Accepted Resolution for DSM (m) |
|---|---|---|---|---|---|
| TLS | 0.006 * | 197,806,322 | 30,123.096 | 0.006 | 0.010 |
| UAV 25 m | 0.010 | 15,477,265 | 2356.968 | 0.021 | 0.020 |
| UAV 50 m | 0.020 | 4,669,434 | 711.089 | 0.038 | 0.040 |
| UAV 120 m | 0.048 | 780,718 | 118.892 | 0.092 | 0.090 |
| UAV 350 m | 0.094 | 207,076 | 31.535 | 0.178 | 0.180 |
| EVALUATED | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GNSS XY | TLS XY | 350 XY | 120 XY | 50 XY | 25 XY | ||||||||||
| REFERENCED | GNSS XY | Residual (m) | Min | 0.000 | 0.021 | 0.009 | 0.009 | 0.010 | |||||||
| Max | 0.009 | 0.235 | 0.323 | 0.259 | 0.281 | ||||||||||
| StdDev | 0.002 | 0.048 | 0.058 | 0.057 | 0.071 | ||||||||||
| Mean | 0.001 | 0.105 | 0.090 | 0.064 | 0.085 | ||||||||||
| RMS (m) | 0.003 | 0.115 | 0.107 | 0.085 | 0.111 | ||||||||||
| Frequency Axis | TLS XY |  | Residual (m) | Min | 0.022 | 0.009 | 0.009 | 0.010 | Density Axis | ||||||
| Max | 0.236 | 0.322 | 0.258 | 0.280 | |||||||||||
| StdDev | 0.048 | 0.058 | 0.056 | 0.071 | |||||||||||
| Mean | 0.105 | 0.090 | 0.064 | 0.084 | |||||||||||
| RMS (m) | 0.115 | 0.107 | 0.085 | 0.110 | |||||||||||
| 350 XY |  |  | Residual (m) | Min | 0.013 | 0.013 | 0.025 | ||||||||
| Max | 0.261 | 0.454 | 0.506 | ||||||||||||
| StdDev | 0.053 | 0.083 | 0.108 | ||||||||||||
| Mean | 0.124 | 0.128 | 0.150 | ||||||||||||
| RMS (m) | 0.135 | 0.152 | 0.185 | ||||||||||||
| 120 XY |  |  |  | Residual (m) | Min | 0.010 | 0.004 | ||||||||
| Max | 0.211 | 0.251 | |||||||||||||
| StdDev | 0.040 | 0.068 | |||||||||||||
| Mean | 0.079 | 0.105 | |||||||||||||
| RMS (m) | 0.088 | 0.125 | |||||||||||||
| 50 XY |  |  |  |  | Residual (m) | Min | 0.001 | ||||||||
| Max | 0.125 | ||||||||||||||
| StdDev | 0.036 | ||||||||||||||
| Mean | 0.046 | ||||||||||||||
| RMS (m) | 0.058 | ||||||||||||||
| 25 XY |  |  |  |  |  | ||||||||||
| Horizontal Difference Axis | |||||||||||||||
| Analysis Type | GNSS XY | TLS XY | 350 XY | 120 XY | 50 XY | 25 XY |
|---|---|---|---|---|---|---|
| Mean Diff. Scores | 54.71 | 54.64 | 18.75 | 35.31 | 49.97 | 37.74 |
| Min Diff. Scores | 60.13 | 60.06 | 25.13 | 64.14 | 66.67 | 61.22 |
| Max Diff. Scores | 57.28 | 57.34 | 33.74 | 46.74 | 44.17 | 43.73 |
| Std Dev Diff. Scores | 57.56 | 57.62 | 37.96 | 49.89 | 50.60 | 35.08 |
| RMS Diff. Scores | 55.37 | 55.34 | 24.39 | 39.75 | 50.01 | 36.79 |
| Mean Score | 57.01 | 57.00 | 27.99 | 47.17 | 52.28 | 42.91 |
| EVALUATED | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| GNSS Z | TLS Max Z | TLS Min Z | 350 Z | 120 Z | 50 Z | 25 Z | ||||
| REFERENCED | Frequency Axis | GNSS Z |  | R2 = 0.9993 Adj.R2 = 0.9993 y = 1.0002x + 0.0837 RMSD = 0.0727 | R2 = 0.9993 Adj.R2 = 0.9993 y = 1.0000x + 0.0985 RMSD = 0.0725 | R2 = 0.9995 Adj.R2 = 0.9995 y = 0.9985x + 0.2287 RMSD = 0.0621 | R2 = 0.9997 Adj.R2 = 0.9997 y = 1.0018x − 0.0809 RMSD = 0.1683 | R2 = 0.9834 Adj.R2 = 0.9834 y = 0.9832x + 1.6381 RMSD = 0.3626 | R2 = 0.9382 Adj.R2 = 0.9381 y = 0.9652x + 3.3146 RMSD = 0.7031 | Density Axis |
| TLS Max Z |  |  | R2 = 1.0000 Adj.R2 = 1.0000 y = 0.9997x + 0.0163 RMSD = 0.0158 | R2 = 0.9993 Adj.R2 = 0.9993 y = 0.9978x + 0.1837 RMSD = 0.0748 | R2 = 0.9996 Adj.R2 = 0.9996 y = 1.0012x − 0.1305 RMSD = 0.2691 | R2 = 0.9842 Adj.R2 = 0.9841 y = 0.9830x + 1.5512 RMSD = 0.3544 | R2 = 0.9398 Adj.R2 = 0.9396 y = 0.9655x + 3.1907 RMSD = 0.6942 | |||
| TLS Min Z |  |  |  | R2 = 0.9993 Adj.R2 = 0.9993 y= 0.9981x + 0.1693 RMSD = 0.0753 | R2 = 0.9996 Adj.R2 = 0.9996 y = 1.0014x − 0.1457 RMSD = 0.2925 | R2 = 0.9844 Adj.R2 = 0.9844 y = 0.9834x + 1.5248 RMSD = 0.3514 | R2 = 0.9403 Adj.R2 = 0.9401 y = 0.9660x + 3.1531 RMSD = 0.6913 | |||
| 350 Z |  |  |  |  | R2 = 0.9997 Adj.R2 = 0.9997 y = 1.0030x − 0.2879 RMSD = 0.5744 | R2 = 0.9827 Adj.R2 = 0.9827 y = 0.9841x + 1.4652 RMSD = 0.3703 | R2 = 0.9370 Adj.R2 = 0.9369 y = 0.9658x + 3.1698 RMSD = 0.7100 | |||
| 120 Z |  |  |  |  |  | R2 = 0.9838 Adj.R2 = 0.9838 y = 0.9815x + 1.7111 RMSD = 0.3581 | R2 = 0.9389 Adj.R2 = 0.9387 y = 0.9637x + 3.3746 RMSD = 0.6994 | |||
| 50 Z |  |  |  |  |  |  | R2 = 0.9851 Adj.R2 = 0.9850 y = 0.9975x + 0.2989 RMSD = 0.3456 | |||
| 25 Z |  |  |  |  |  |  |  | |||
| Z Values | ||||||||||
| EVALUATED | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TLS Max Z | TLS Min Z | 350 Z | 120 Z | 50 Z | 25 Z | |||||||||
| Diff. (m) | A. Diff. (m) | Diff. (m) | A. Diff. (m) | Diff. (m) | A. Diff. (m) | Diff. (m) | A. Diff. (m) | Diff. (m) | A. Diff. (m) | Diff. (m) | A. Diff. (m) | |||
| GNSS Z | Min | −0.016 | 0.011 | −0.027 | 0.004 | −0.113 | 0.000 | −0.028 | 0.000 | −0.345 | 0.000 | −0.666 | 0.001 | REFERENCED |
| Max | 0.523 | 0.523 | 0.521 | 0.521 | 0.351 | 0.351 | 0.269 | 0.269 | 1.097 | 1.097 | 2.045 | 2.045 | ||
| Std Dev | 0.073 | 0.073 | 0.072 | 0.072 | 0.062 | 0.059 | 0.048 | 0.047 | 0.366 | 0.250 | 0.710 | 0.456 | ||
| Mean | 0.105 | 0.105 | 0.096 | 0.096 | 0.097 | 0.099 | 0.079 | 0.079 | 0.145 | 0.304 | 0.224 | 0.589 | ||
| Median | 0.085 | 0.085 | 0.076 | 0.076 | 0.089 | 0.089 | 0.068 | 0.068 | 0.048 | 0.230 | 0.036 | 0.481 | ||
| NMAD | 0.041 | 0.040 | 0.043 | 0.039 | 0.377 | 0.733 | ||||||||
| RMS | 0.128 | 0.120 | 0.115 | 0.093 | 0.394 | 0.744 | ||||||||
| TLS Max Z | Min | −0.163 | 0.000 | −0.366 | 0.000 | −0.408 | 0.000 | −0.492 | 0.001 | −0.763 | 0.002 | |||
| Max | 0.000 | 0.163 | 0.200 | 0.366 | 0.123 | 0.408 | 0.876 | 0.876 | 1.818 | 1.818 | ||||
| Std Dev | 0.016 | 0.016 | 0.075 | 0.054 | 0.056 | 0.049 | 0.358 | 0.199 | 0.701 | 0.405 | ||||
| Mean | −0.009 | 0.009 | −0.008 | 0.053 | −0.026 | 0.038 | 0.040 | 0.300 | 0.119 | 0.585 | ||||
| Median | −0.004 | 0.004 | 0.002 | 0.037 | −0.015 | 0.022 | −0.045 | 0.293 | −0.048 | 0.549 | ||||
| NMAD | 0.006 | 0.055 | 0.031 | 0.401 | 0.783 | |||||||||
| RMS | 0.018 | 0.075 | 0.062 | 0.360 | 0.711 | |||||||||
| TLS Min Z | Min | −0.365 | 0.000 | −0.407 | 0.000 | −0.475 | 0.001 | −0.738 | 0.000 | |||||
| Max | 0.200 | 0.365 | 0.132 | 0.407 | 0.876 | 0.876 | 1.819 | 1.819 | ||||||
| Std Dev | 0.076 | 0.052 | 0.056 | 0.047 | 0.355 | 0.201 | 0.698 | 0.407 | ||||||
| Mean | 0.001 | 0.054 | −0.017 | 0.035 | 0.049 | 0.296 | 0.128 | 0.582 | ||||||
| Median | 0.014 | 0.039 | −0.006 | 0.020 | −0.034 | 0.289 | −0.042 | 0.549 | ||||||
| NMAD | 0.054 | 0.030 | 0.393 | 0.774 | ||||||||||
| RMS | 0.076 | 0.059 | 0.358 | 0.710 | ||||||||||
| 350 Z | Min | −0.230 | 0.000 | −0.528 | 0.001 | −0.857 | 0.002 | |||||||
| Max | 0.201 | 0.230 | 0.998 | 0.998 | 1.946 | 1.946 | ||||||||
| Std Dev | 0.050 | 0.036 | 0.373 | 0.211 | 0.717 | 0.416 | ||||||||
| Mean | −0.018 | 0.039 | 0.049 | 0.311 | 0.127 | 0.597 | ||||||||
| Median | −0.020 | 0.031 | −0.052 | 0.286 | −0.067 | 0.545 | ||||||||
| NMAD | 0.037 | 0.394 | 0.754 | |||||||||||
| RMS | 0.053 | 0.376 | 0.728 | |||||||||||
| 120 Z | Min | −0.417 | 0.001 | −0.753 | 0.000 | |||||||||
| Max | 0.989 | 0.989 | 1.937 | 1.937 | ||||||||||
| Std Dev | 0.362 | 0.211 | 0.707 | 0.418 | ||||||||||
| Mean | 0.066 | 0.301 | 0.145 | 0.588 | ||||||||||
| Median | −0.027 | 0.271 | −0.039 | 0.520 | ||||||||||
| NMAD | 0.386 | 0.364 | ||||||||||||
| RMS | 0.368 | 0.722 | ||||||||||||
| 50 Z | Min | −0.398 | 0.000 | |||||||||||
| Max | 0.948 | 0.948 | ||||||||||||
| Std Dev | 0.346 | 0.208 | ||||||||||||
| Mean | 0.078 | 0.287 | ||||||||||||
| Median | −0.008 | 0.252 | ||||||||||||
| NMAD | 0.364 | |||||||||||||
| RMS | 0.354 | |||||||||||||
| Analysis Type | GNSS Z | TLS Max Z | TLS Min Z | 350 Z | 120 Z | 50 Z | 25 Z |
|---|---|---|---|---|---|---|---|
| R2 Scores | 78.68 | 78.68 | 79.42 | 79.47 | 78.39 | 74.50 | 15.16 |
| RMSD Scores | 67.67 | 66.72 | 66.29 | 57.45 | 45.57 | 50.84 | 10.00 |
| Mean A. Diff. Scores | 65.48 | 70.65 | 71.13 | 68.85 | 70.89 | 50.53 | 10.10 |
| Min A. Diff. Scores | 74.49 | 79.11 | 91.04 | 93.08 | 97.86 | 93.84 | 92.57 |
| Max A. Diff. Scores | 66.09 | 71.86 | 71.90 | 70.94 | 71.09 | 57.43 | 15.55 |
| Std Dev A. Diff. Scores | 67.36 | 73.50 | 73.50 | 72.22 | 72.97 | 55.16 | 16.18 |
| RMS Diff. Scores | 65.92 | 71.42 | 71.74 | 69.84 | 71.38 | 51.79 | 11.43 |
| Median | 86.18 | 40.27 | 43.51 | 39.31 | 38.82 | 30.33 | 24.98 |
| NMAD | 73.44 | 72.49 | 72.92 | 72.05 | 73.51 | 51.08 | 11.63 |
| Mean Score | 71.70 | 69.41 | 71.27 | 69.25 | 68.94 | 57.28 | 23.07 |
| EVALUATED | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TLS Min Z | 350 Z | 120 Z | 50 Z | 25 Z | ||||||||
| Volume (m3) | Area (m2) | Volume (m3) | Area (m2) | Volume (m3) | Area (m2) | Volume (m3) | Area (m2) | Volume (m3) | Area (m2) | |||
| TLS Max Z | F.P. | 0.000 | 0.000 | 168.763 | 3245.343 | 30.530 | 1732.374 | 1159.574 | 3149.960 | 2401.601 | 3257.313 | REFERENCED |
| F.N. | 58.359 | 5178.640 | 225.280 | 3320.448 | 247.318 | 4833.053 | 807.084 | 3416.043 | 1420.857 | 3308.710 | ||
| T. Diff. | −58.359 | 5178.640 | −56.518 | 75.105 | −216.788 | 3100.679 | 352.491 | 266.083 | 980.743 | 51.397 | ||
| A.T. Diff. | 58.359 | 5178.640 | 394.043 | 6565.791 | 277.848 | 6565.428 | 1966.658 | 6566.003 | 3822.458 | 6566.023 | ||
| No Diff. Area (m2) | 1387.970 | 0.712 | 0.587 | 0.053 | 0.025 | |||||||
| A.T. Diff. V/A | 0.011 | 0.060 | 0.042 | 0.300 | 0.582 | |||||||
| TLS Min Z | F.P. | 196.805 | 3719.098 | 46.800 | 2380.819 | 1182.040 | 3217.421 | 2424.525 | 3294.550 | |||
| F.N. | 194.846 | 2847.013 | 205.061 | 4184.533 | 771.108 | 3348.571 | 1385.424 | 3271.469 | ||||
| T. Diff. | 1.959 | 872.085 | −158.261 | 1803.714 | 410.932 | 131.150 | 1039.101 | 23.081 | ||||
| A.T. Diff. | 391.651 | 6566.112 | 251.861 | 6565.352 | 1953.149 | 6565.992 | 3809.949 | 6566.019 | ||||
| No Diff. Area (m2) | 0.391 | 0.662 | 0.064 | 0.028 | ||||||||
| A.T. Diff. V/A | 0.060 | 0.038 | 0.297 | 0.580 | ||||||||
| 350 Z | F.P. | 65.779 | 1923.091 | 1229.582 | 3181.161 | 2471.911 | 3270.461 | |||||
| F.N. | 225.750 | 4637.043 | 821.065 | 3382.532 | 1435.583 | 3295.330 | ||||||
| T. Diff. | −159.972 | 2713.952 | 408.518 | 201.371 | 1036.327 | 24.869 | ||||||
| A.T. Diff. | 291.529 | 6560.134 | 2050.647 | 6563.692 | 3907.494 | 6565.791 | ||||||
| No Diff. Area (m2) | 0.534 | 0.142 | 0.036 | |||||||||
| A.T. Diff. V/A | 0.044 | 0.312 | 0.595 | |||||||||
| 120 Z | F.P. | 1263.954 | 3306.675 | 2510.298 | 3340.528 | |||||||
| F.N. | 694.730 | 3257.542 | 1313.198 | 3224.757 | ||||||||
| T. Diff. | 569.224 | 49.134 | 1197.101 | 115.771 | ||||||||
| A.T. Diff. | 1958.684 | 6564.217 | 3823.496 | 6565.286 | ||||||||
| No Diff. Area (m2) | 0.047 | 0.009 | ||||||||||
| A.T. Diff. V/A | 0.298 | 0.582 | ||||||||||
| 50 Z | F.P. | 1248.394 | 3377.674 | |||||||||
| F.N. | 620.406 | 3187.482 | ||||||||||
| T. Diff. | 627.988 | 190.192 | ||||||||||
| A.T. Diff. | 1868.799 | 6565.156 | ||||||||||
| No Diff. Area (m2) | 0.036 | |||||||||||
| A.T. Diff. V/A | 0.285 | |||||||||||
| Analysis Type | TLS Max Z | TLS Min Z | 350 Z | 120 Z | 50 Z | 25 Z |
|---|---|---|---|---|---|---|
| F.P. Vol. Scores | 70.04 | 69.33 | 67.07 | 68.79 | 51.53 | 11.91 |
| F.N. Vol. Scores | 64.17 | 66.27 | 62.09 | 65.23 | 50.30 | 14.56 |
| A.T. Diff. Vol. Scores | 67.64 | 67.92 | 64.96 | 67.20 | 50.61 | 11.98 |
| F.P. Area Scores | 38.78 | 32.18 | 17.51 | 31.79 | 12.71 | 11.05 |
| F.N. Area Scores | 50.06 | 60.58 | 72.15 | 49.38 | 79.78 | 82.39 |
| A.T. Diff. Area Scores | 20.02 | 20.01 | 0.13 | 0.15 | 0.08 | 0.03 |
| No Diff. Area Scores | 20.02 | 20.02 | 0.03 | 0.03 | 0.00 | 0.00 |
| A.T. Diff. V/A Scores | 67.84 | 68.12 | 65.22 | 67.47 | 50.81 | 12.03 |
| Mean Score | 49.82 | 50.55 | 43.64 | 43.75 | 36.98 | 17.99 |
| Quadratic Functions | Cubic Functions | |||
|---|---|---|---|---|
| GNSS Z–50 Z | GNSS Z–25 Z | GNSS Z–50 Z | GNSS Z–25 Z | |
| Mean Distance of actual residuals from fitted surfaces (m) | −0.0003 | −0.0006 | −0.0002 | −0.0003 |
| Std. Dev. of distances from fitted surfaces (m) | 0.042 | 0.060 | 0.040 | 0.048 |
| Radius of Spherical Dome Model (m) | 3478.919 | 1839.072 | 3452.649 | 1831.117 |
| Mean Distance of actual residuals from fitted spheres (m) | 0.066 | 0.064 | 0.081 | 0.075 |
| Std. Dev. of distances from fitted spheres (m) | 0.048 | 0.055 | 0.053 | 0.059 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yurtseven, H. Comparison of GNSS-, TLS- and Different Altitude UAV-Generated Datasets on the Basis of Spatial Differences. ISPRS Int. J. Geo-Inf. 2019, 8, 175. https://doi.org/10.3390/ijgi8040175
Yurtseven H. Comparison of GNSS-, TLS- and Different Altitude UAV-Generated Datasets on the Basis of Spatial Differences. ISPRS International Journal of Geo-Information. 2019; 8(4):175. https://doi.org/10.3390/ijgi8040175
Chicago/Turabian StyleYurtseven, Huseyin. 2019. "Comparison of GNSS-, TLS- and Different Altitude UAV-Generated Datasets on the Basis of Spatial Differences" ISPRS International Journal of Geo-Information 8, no. 4: 175. https://doi.org/10.3390/ijgi8040175
APA StyleYurtseven, H. (2019). Comparison of GNSS-, TLS- and Different Altitude UAV-Generated Datasets on the Basis of Spatial Differences. ISPRS International Journal of Geo-Information, 8(4), 175. https://doi.org/10.3390/ijgi8040175