A Virtual Reality Simulation Method for Crowd Evacuation in a Multiexit Indoor Fire Environment

 ,
, 
Abstract
:1. Introduction
2. Method
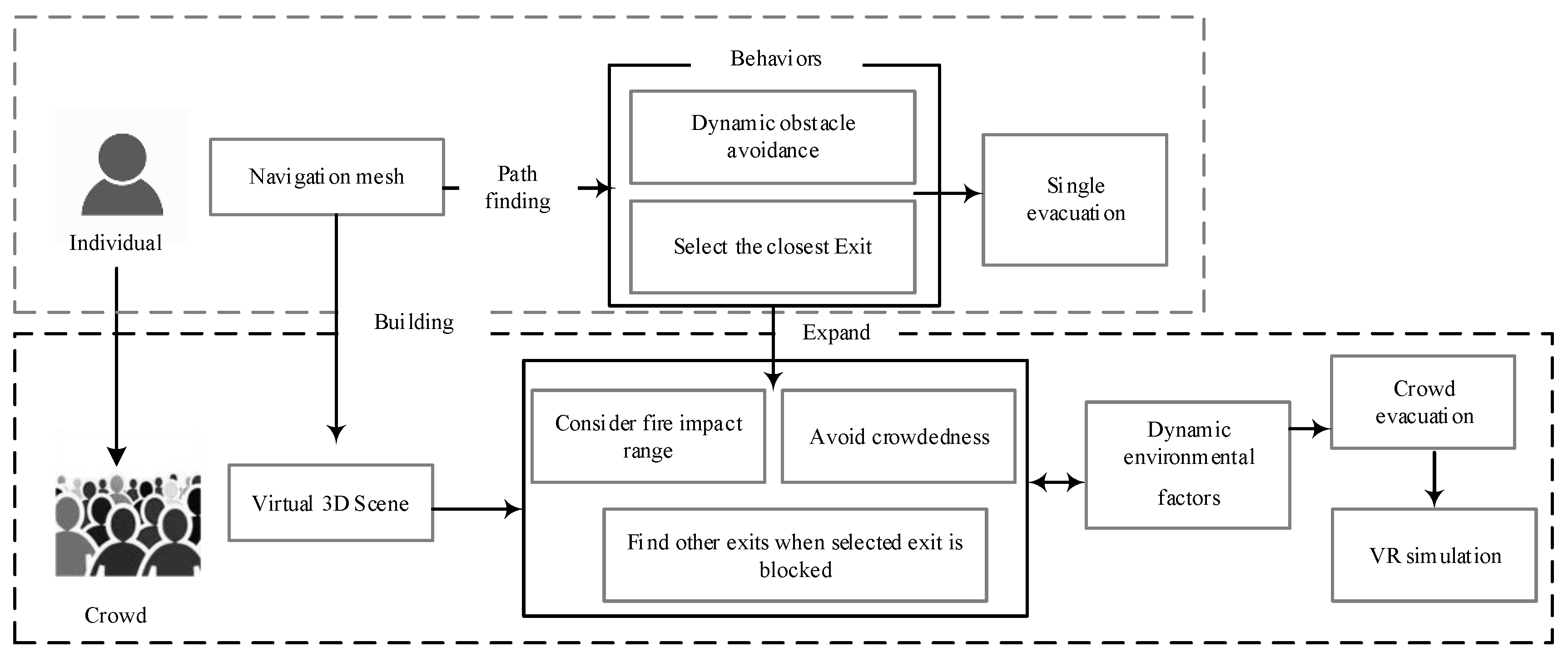
2.1. Overall Framework
2.2. Dynamic Planning of Evacuation Paths for an Occupant in Multiexit Indoor Fire Scenes
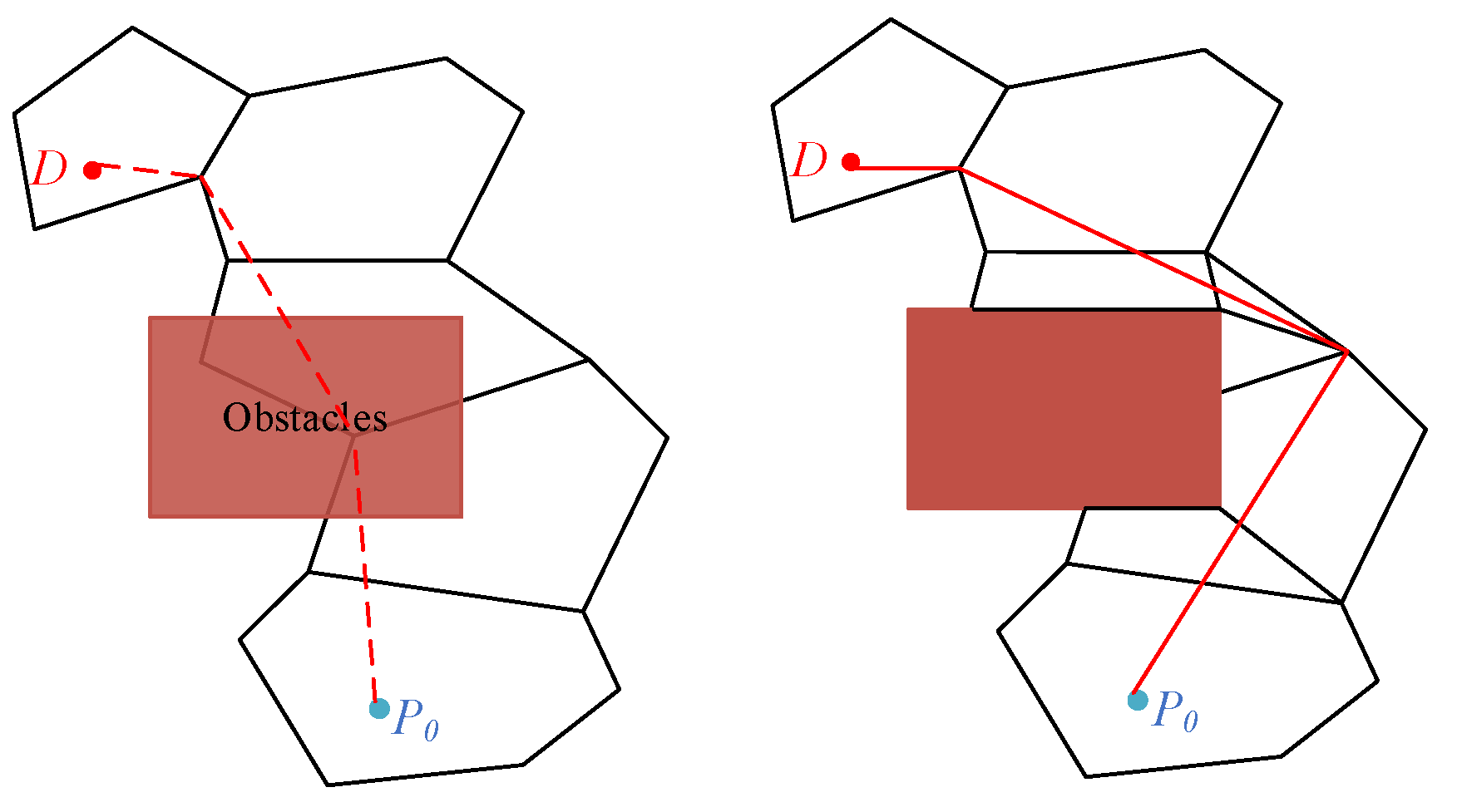
2.2.1. Path Planning Based on the Corner Point Algorithm of the Navigation Mesh
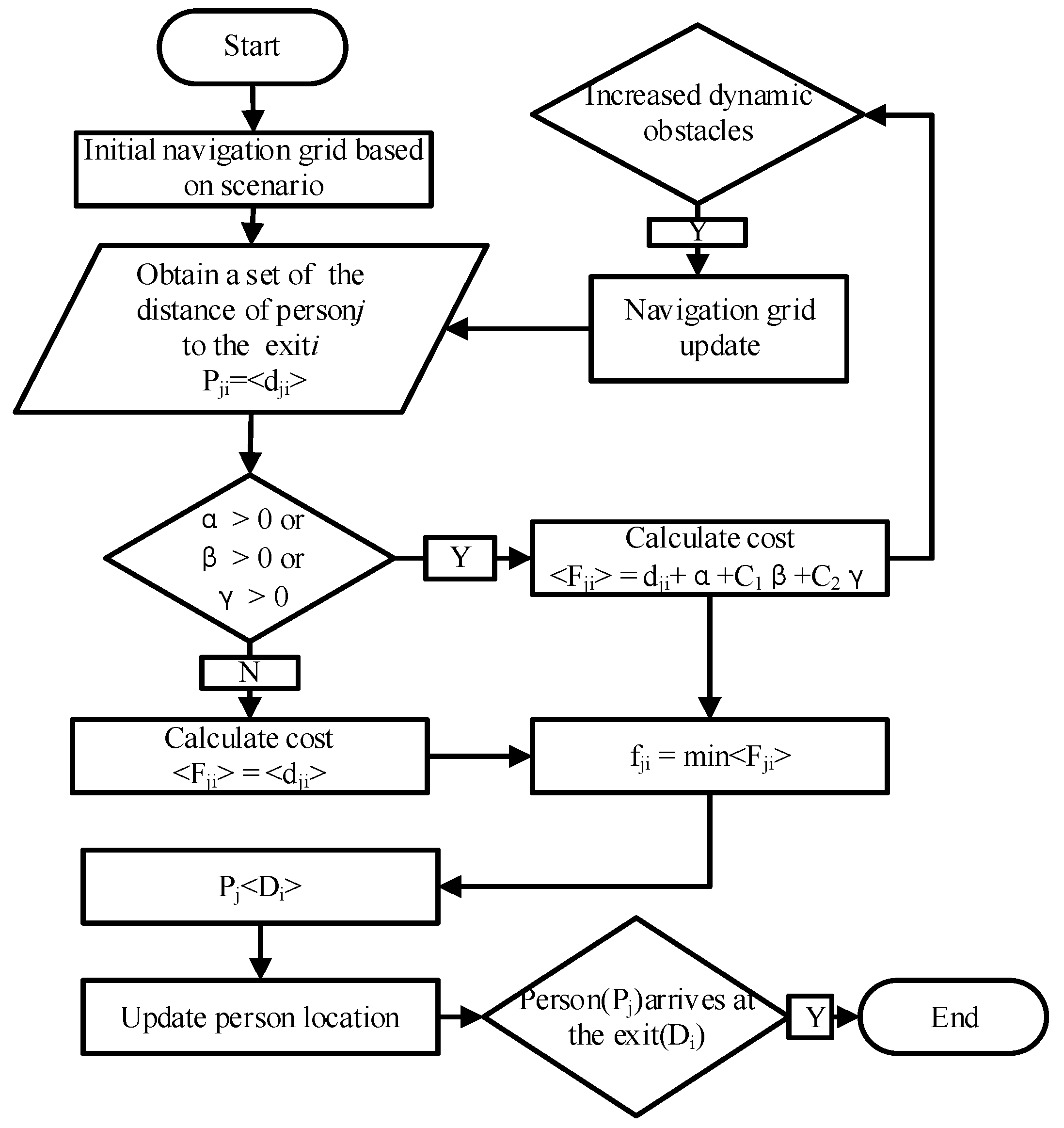
2.2.2. Evacuation Route Planning for an Occupant in Multiexit Scenes
- Construct an indoor navigation mesh with a convex polygon as the basic unit.
- Determine the initial position information of people, the position information of each exit, and the safety area information. Set the initial location information of people and the location information collection of exits that can be used for escape , and set the safe area as outdoor space.
- Determine whether the current position of the people is in a safe area. If it is not in the safe area, proceed with the following steps; if it is already in the safe area, the evacuation is over.
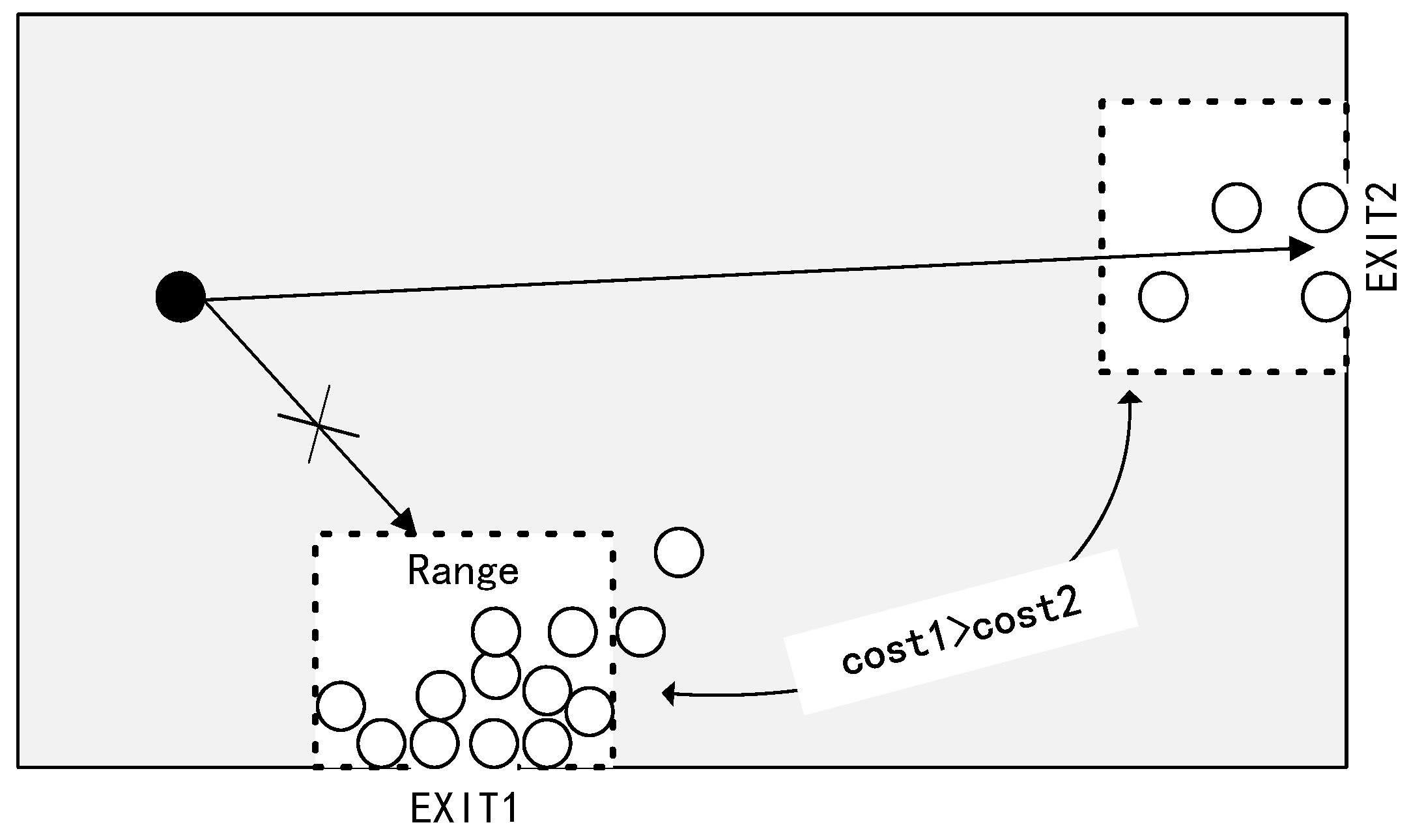
- Calculate the evacuation travel cost for each exit. Based on the current indoor scene, the evacuation route calculated by the route planning method is the travel cost of the evacuation route from the current location to exit , and the travel cost is recorded as the planned path length.
- Find the exit with the lowest evacuation cost. Based on step (3) with regard to the calculated travel costs , , , exit j with the lowest travel cost is selected .
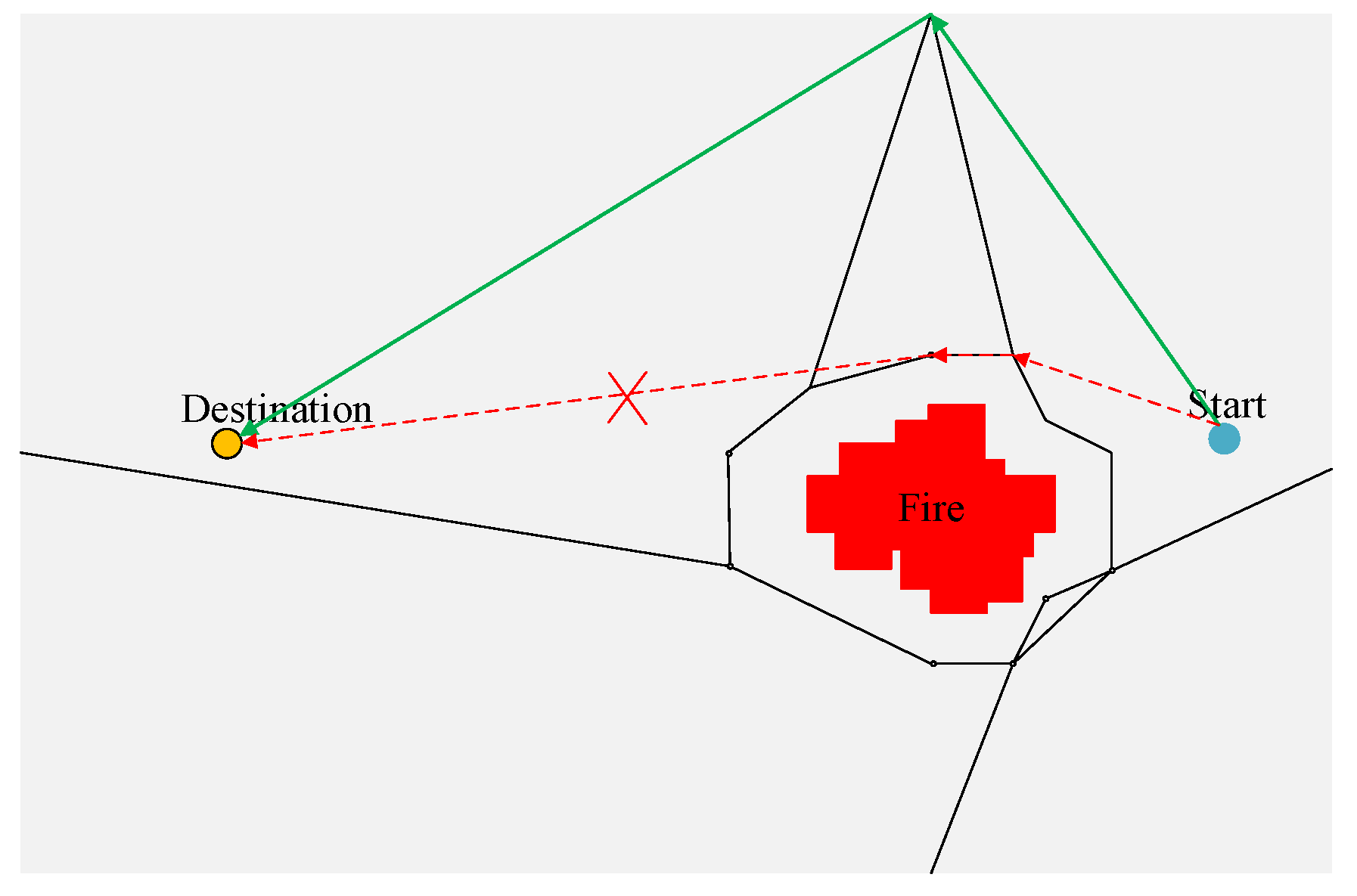
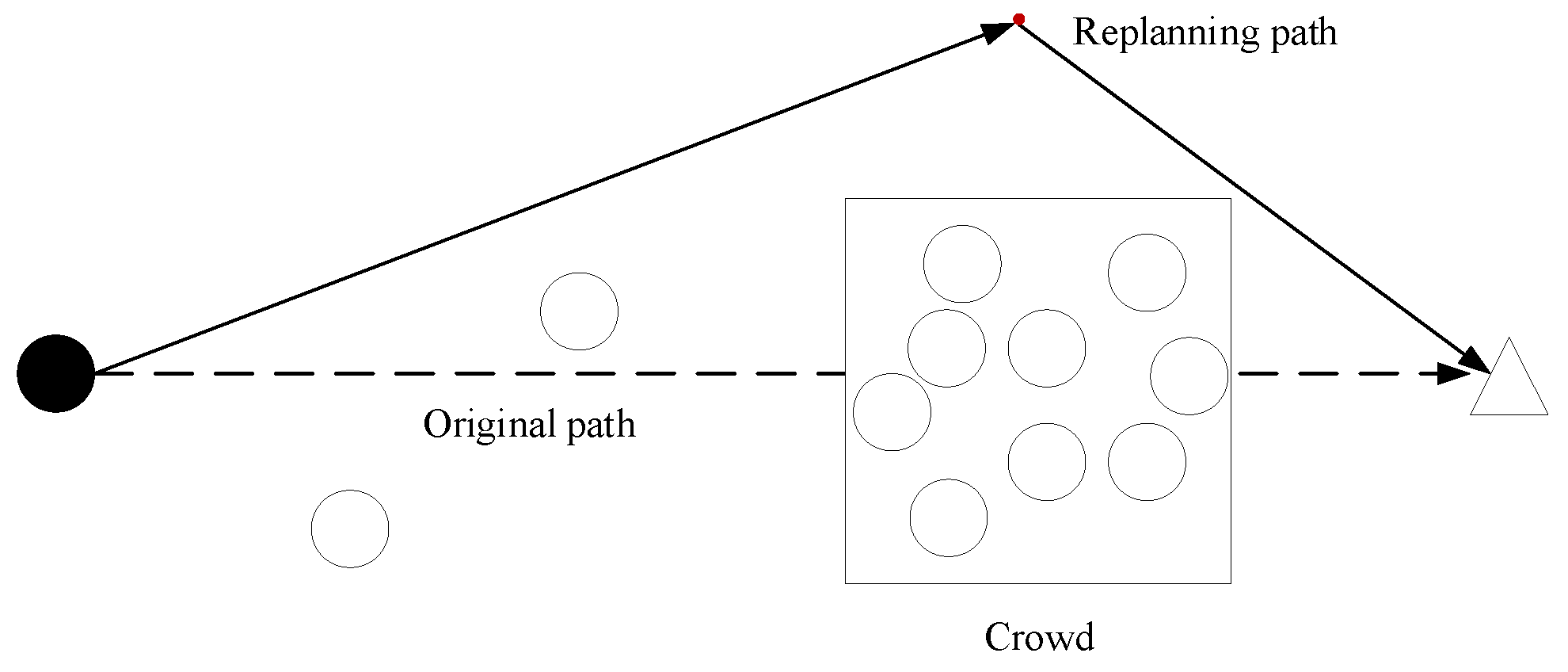
- Based on the currently selected exit , people will follow the dynamically planned escape route to escape. Update the position of people and update the navigation mesh if a dynamic obstacle is added to the scene.
- Determine whether the navigation mesh is updated. If the navigation mesh is updated, repeat step (3). If the indoor navigation mesh is not updated, proceed to step (5).
2.3. VR Simulation of Indoor Fire Crowd Evacuation
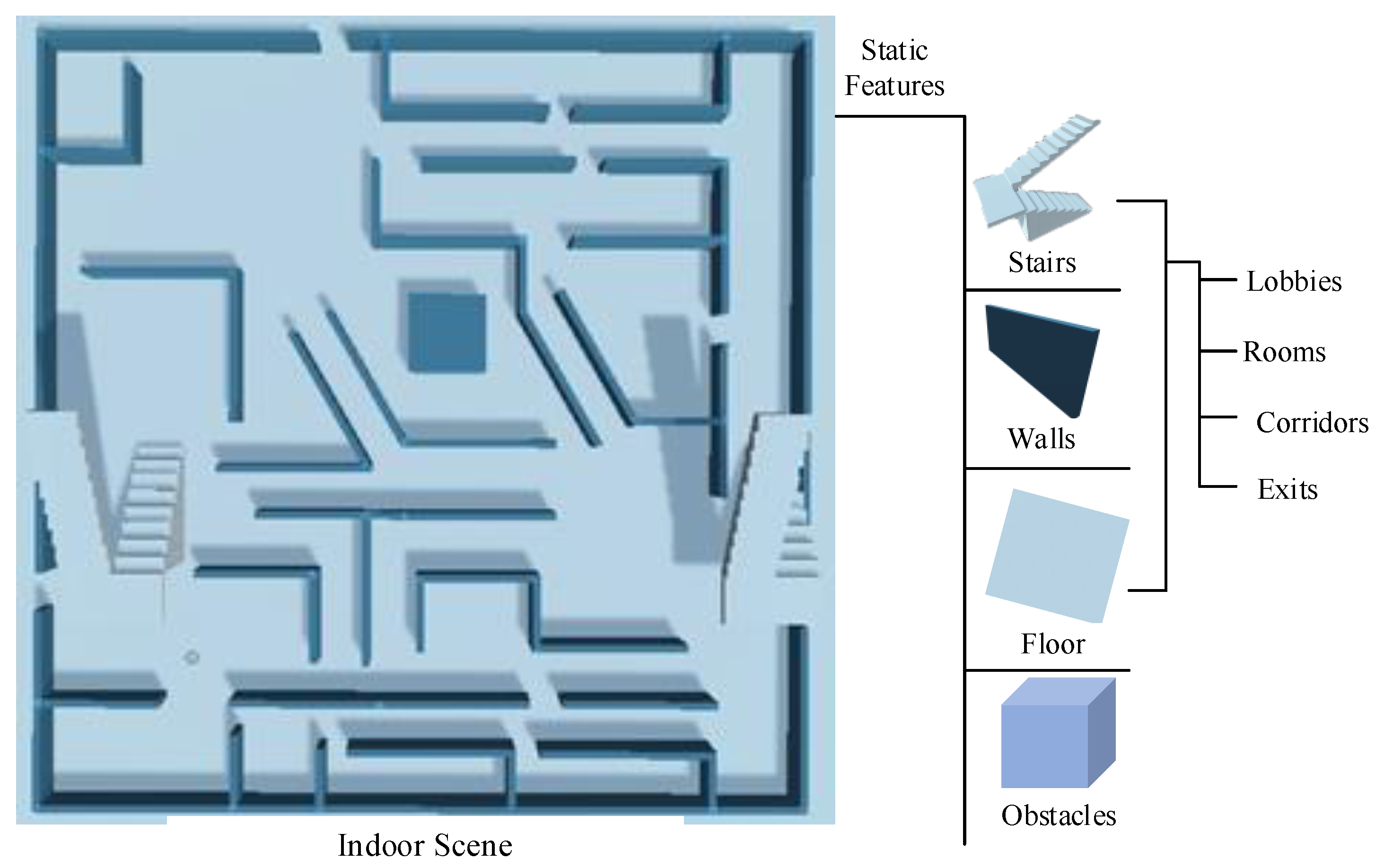
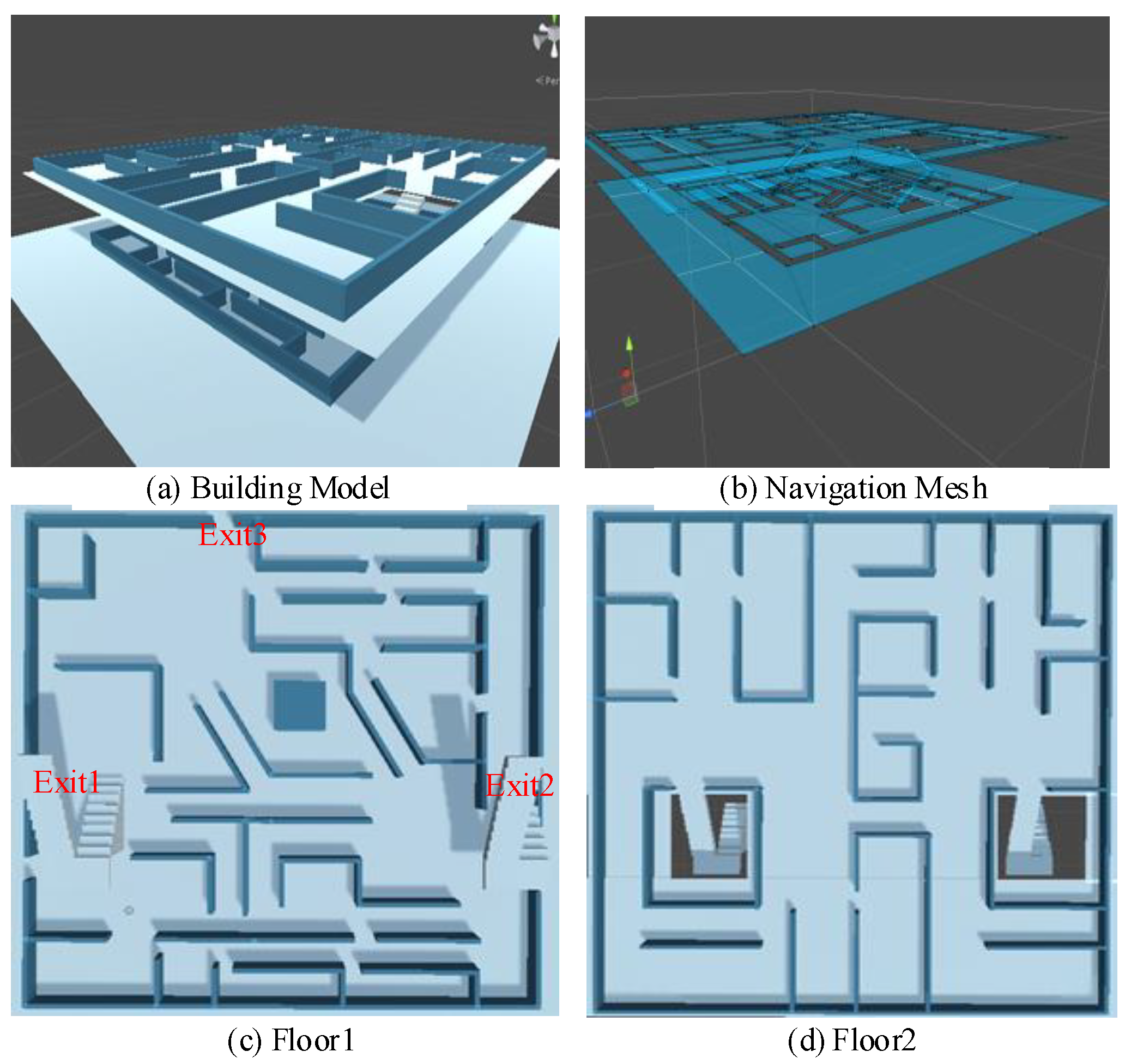
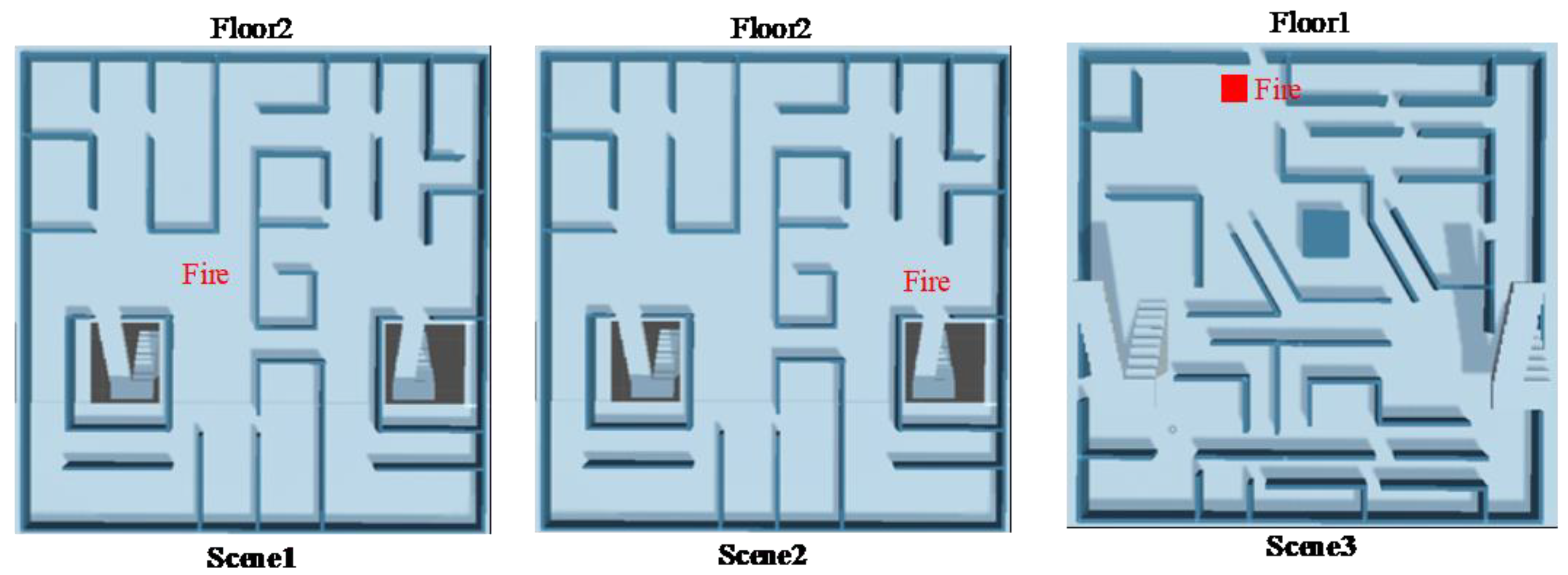
2.3.1. Construction of a Virtual Indoor Fire Scene
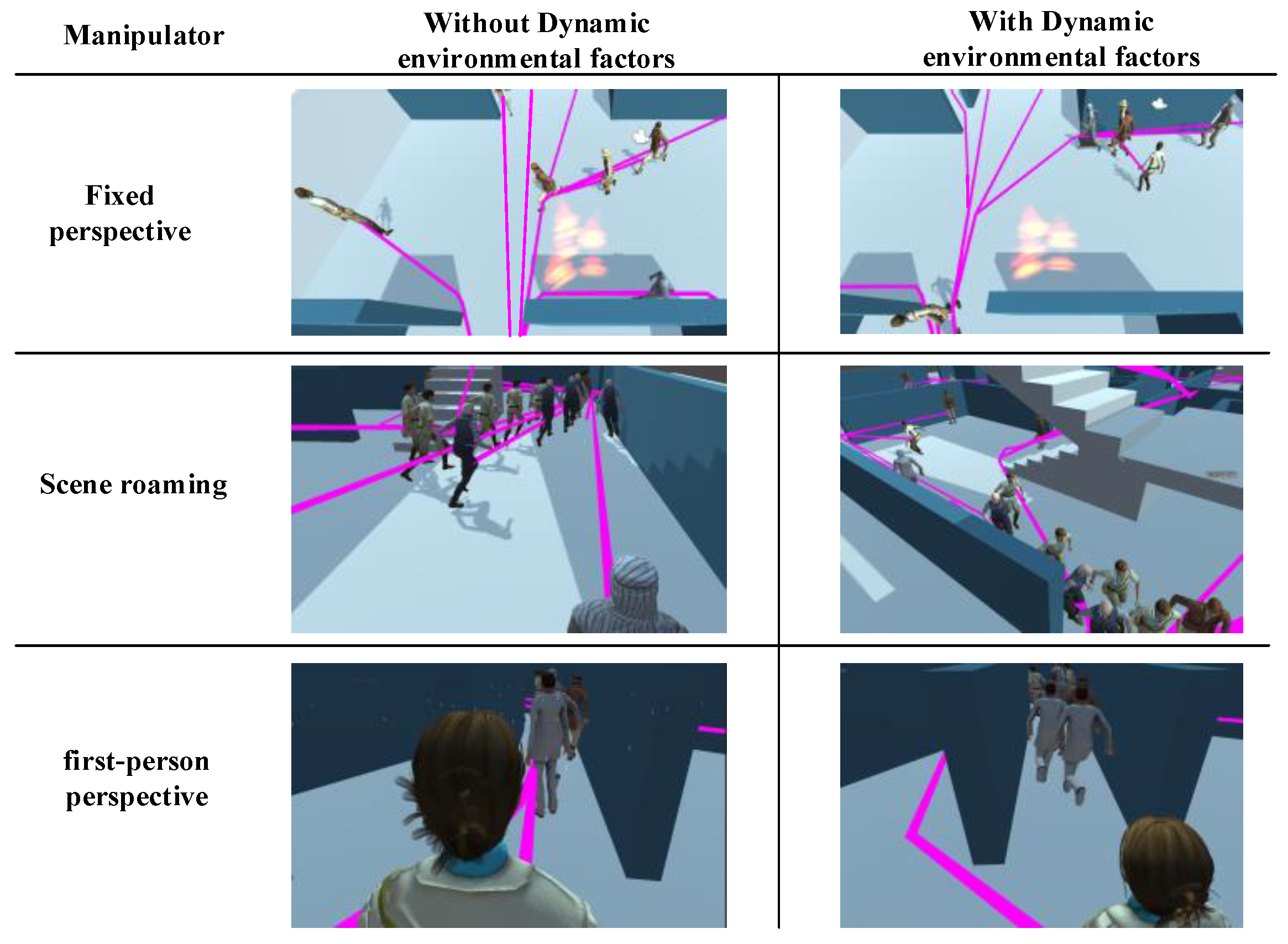
2.3.2. Dynamic Environmental Factor Analysis
2.3.3. VR Simulation of Crowd Evacuation
3. Experiment
3.1. Preparation
3.2. Process
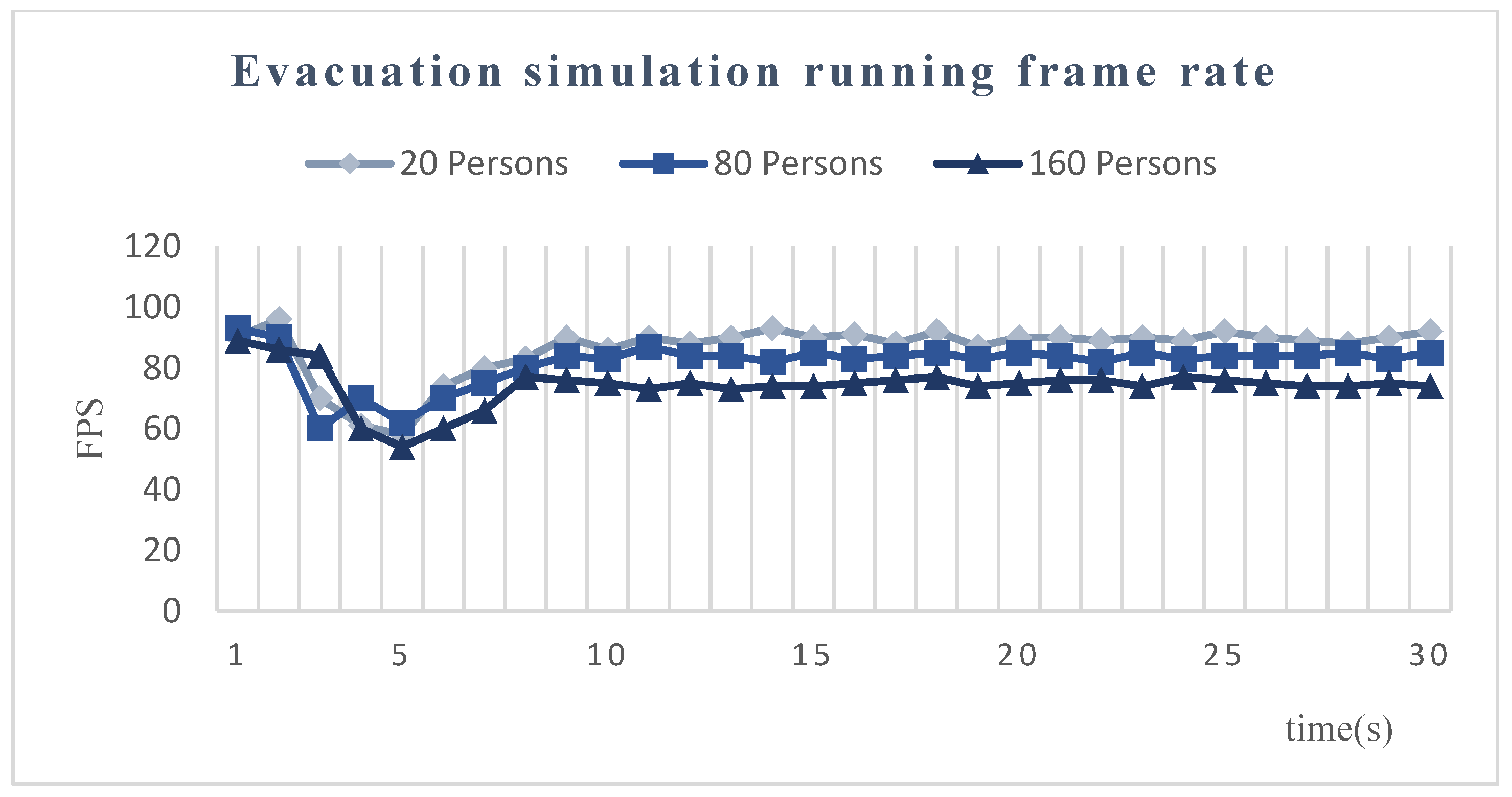
- P1. Fluency (0–5 points), which means there is no lag or delay during the experience. A higher score means better visual fluency.
- P2. Interactive experience (0–5 points), which means that users feel comfortable with the interactive methods. A higher score means a better experience.
- P3. Visual reliability of human behavior (0–5 points). Users judge whether the movement of people in the scene is realistic. A higher score means more reliable visualization.
- P4. Panic (0–5 points). During the evacuation of the crowd, users feel panic. A higher score means a higher degree of panic.
4. Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ran, H.; Sun, L.; Gao, X. Influences of intelligent evacuation guidance system on crowd evacuation in building fire. Autom. Constr. 2014, 41, 78–82. [Google Scholar] [CrossRef]
- Goodwin, M.; Granmo, O.-C.; Radianti, J. Escape planning in realistic fire scenarios with Ant Colony Optimisation. Appl. Intell. 2014, 42, 24–35. [Google Scholar] [CrossRef] [Green Version]
- Helbing, D.; Johansson, A. Pedestrian, crowd, and evacuation dynamics. arXiv 2013, arXiv:1309.1609. [Google Scholar]
- Han, Y.; Liu, H.; Moore, P. Extended route choice model based on available evacuation route set and its application in crowd evacuation simulation. Simul. Model. Pr. Theory 2017, 75, 1–16. [Google Scholar] [CrossRef]
- Pendit, U.C.; Bin Mahzan, M.; Basir, M.D.F.B.M.; Bin Mahadzir, M.; Musa, S.N.B. Virtual reality escape room: The last breakout. In Proceedings of the 2017 2nd International Conference on Information Technology (INCIT), Nakhon Pathom, Thailand, 2–3 November 2017; pp. 1–4. [Google Scholar]
- Aggarwal, R.; Black, S.; Hance, J.; Darzi, A.; Cheshire, N. Virtual Reality Simulation Training can Improve Inexperienced Surgeons’ Endovascular Skills. Eur. J. Vasc. Endovasc. Surg. 2006, 31, 588–593. [Google Scholar] [CrossRef] [Green Version]
- Goedicke, D.; Li, J.; Evers, V.; Ju, W. VR-OOM: Virtual reality on-road driving simulation. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018. [Google Scholar]
- Häfner, P.; Häfner, V.; Ovtcharova, J. Teaching Methodology for Virtual Reality Practical Course in Engineering Education. Procedia Comput. Sci. 2013, 25, 251–260. [Google Scholar] [CrossRef] [Green Version]
- Jenson, C.E.; Forsyth, D.M. Virtual reality simulation: Using three-dimensional technology to teach nursing students. Comput. Inform. Nurs. 2012, 30, 312318. [Google Scholar] [CrossRef] [Green Version]
- Walsh, C.M.; Sherlock, M.E.; Ling, S.C.; Carnahan, H. Virtual reality simulation training for health professions trainees in gastrointestinal endoscopy. Cochrane Database Syst. Rev. 2012, 6, CD008237. [Google Scholar] [CrossRef]
- Farley, H.S. Using 3D worlds in prison: Driving, learning and escape. J. Virtual Worlds Res. 2018, 11. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Lin, J.; Li, N. A virtual reality based study of indoor fire evacuation after active or passive spatial exploration. Comput. Hum. Behav. 2019, 90, 37–45. [Google Scholar] [CrossRef]
- Lo, S.; Huang, H.; Wang, P.; Yuen, K.K.R. A game theory based exit selection model for evacuation. Fire Saf. J. 2006, 41, 364–369. [Google Scholar] [CrossRef]
- Botea, A.; Bouzy, B.; Buro, M.; Bauckhage, C.; Nau, D. Pathfinding in Games; Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik: Wadern, Germany, 2013. [Google Scholar]
- Li, J.; Harabor, D.; Stuckey, P.J.; Ma, H.; Koenig, S. Symmetry-Breaking Constraints for Grid-Based Multi-Agent Path Finding. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33. [Google Scholar]
- Xiong, Q.; Zhu, Q.; Du, Z.; Zhu, X.; Zhang, Y.; Niu, L.; Li, Y.; Zhou, Y. A Dynamic Indoor Field Model for Emergency Evacuation Simulation. ISPRS Int. J. Geo-Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Zhu, W.; Jia, D.; Wan, H.; Yang, T.; Hu, C.; Qin, K.; Cui, X. Waypoint Graph Based Fast Pathfinding in Dynamic Environment. Int. J. Distrib. Sens. Netw. 2015, 11, 238727. [Google Scholar] [CrossRef] [Green Version]
- Lidén, L. Strategic and Tactical Reasoning with Waypoints. In AI Programming Wisdom; Rabin, S., Ed.; Charles River Media: Needham, MA, USA, 2002; pp. 211–220. [Google Scholar]
- Karas, I.R.; Batuk, F.; Rahman, A.A. An evacuation system for extraordinary indoor air pollution disaster circumstances. Disaster Adv. 2012, 5, 33–40. [Google Scholar]
- Luo, F.; Cao, G.; Li, X. An interactive approach for deriving geometric network models in 3D indoor environments. In Proceedings of the Sixth ACM SIGSPATIAL International Workshop on Indoor Spatial—SA’14, Dallas/Fort Worth, TX, USA, 4 November 2014; pp. 9–16. [Google Scholar] [CrossRef]
- Xie, J.; Li, Q.; Wan, Q.; Li, X. Near optimal allocation strategy for making a staged evacuation plan with multiple exits. Ann. GIS 2014, 20, 159–168. [Google Scholar] [CrossRef] [Green Version]
- Tang, F.; Ren, A. GIS-based 3D evacuation simulation for indoor fire. Build. Environ. 2012, 49, 193–202. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Shen, Y.C.; Ma, L.N. Pathfinding algorithm of 3D scene based on navigation mesh. In Advanced Materials Research; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 1030, pp. 1745–1750. [Google Scholar]
- Xu, X.; Huang, M.; Zou, K. Automatic generated navigation mesh algorithm on 3D game scene. Procedia Eng. 2011, 15, 3215–3219. [Google Scholar] [CrossRef] [Green Version]
- Cong, Z.; De Schutter, B.; Babuška, R. Ant Colony Routing algorithm for freeway networks. Transp. Res. Part C Emerg. Technol. 2013, 37, 1–19. [Google Scholar] [CrossRef]
- Mazzeo, S.; Loiseau, I. An Ant Colony Algorithm for the Capacitated Vehicle Routing. Electron. Notes Discret. Math. 2004, 18, 181–186. [Google Scholar] [CrossRef]
- Ghaffari, A. An Energy Efficient Routing Protocol for Wireless Sensor Networks using A-star Algorithm. J. Appl. Res. Technol. 2014, 12, 815–822. [Google Scholar] [CrossRef] [Green Version]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path Planning with Modified a Star Algorithm for a Mobile Robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.Y.; Shen, Y.C.; Ma, L.N. Pathfinding algorithm of 3D scene based on navigation mesh. Adv. Mater. Res. 2014, 1030–1032, 1745–1750. [Google Scholar] [CrossRef]
- Rozo, K.R.; Arellana, J.; Santander-Mercado, A.; Jubiz-Diaz, M. Modelling building emergency evacuation plans considering the dynamic behaviour of pedestrians using agent-based simulation. Saf. Sci. 2019, 113, 276–284. [Google Scholar] [CrossRef]
- Lin, J.; Zhu, R.; Li, N.; Becerik-Gerber, B. How occupants respond to building emergencies: A systematic review of behavioral characteristics and behavioral theories. Saf. Sci. 2020, 122, 104540. [Google Scholar] [CrossRef]
- Lovreglio, R.; Borri, D.; Dell’Olio, L.; Ibeas, A. A discrete choice model based on random utilities for exit choice in emergency evacuations. Saf. Sci. 2014, 62, 418–426. [Google Scholar] [CrossRef]
- Van Toll, W.G.; Atlas, F.; Cook, I.V.; Geraerts, R. A navigation mesh for dynamic environments. Comput. Animat. Virtual Worlds 2012, 23, 535–546. [Google Scholar] [CrossRef]
- Krishnaswamy, N. Comparison of Efficiency in Pathfinding Algorithms in Game Development; Technical Reports 2009; DePaul University: Chicago, IL, USA, 2009; Available online: https://via.library.depaul.edu/tr/10 (accessed on 17 October 2020).
- Hudziak, M.; Pozniak-Koszalka, I.; Koszalka, L.; Kasprzak, A. Comparison of Algorithms for Multi-agent Pathfinding in Crowded Environment. In Proceedings of the Asian Conference on Intelligent Information and Database Systems, Bali, Indonesia, 23–25 March 2015; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Zhu, J.; She, P.; Li, W.; Cao, Y.; Qi, H.; Wang, B.; Wang, Y. Dynamic Planning Method of Indoor Fire Escape Path Based on Navigation Grid. J. Southwest Jiao Tong Univ. 2019, 55, 1103–1110. [Google Scholar]
- Wong, M.O.; Lee, S. A Technical Review on Developing BIM-Oriented Indoor Route Planning. In Computing in Civil Engineering 2019: Visualization, Information Modeling, and Simulation; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2019; pp. 336–342. [Google Scholar]
- Teo, T.-A.; Cho, K.-H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Kang, H.-K.; Li, K.-J. A Standard Indoor Spatial Data Model—OGC IndoorGML and Implementation Approaches. ISPRS Int. J. Geo-Inf. 2017, 6, 116. [Google Scholar] [CrossRef]
- Jun, Y. Calculation of pool fire thermal radiation safe distance based on Monte Carlo method. Fire Sci. Technol. 2012, 12, 1265–1269. [Google Scholar]
- Lo, S.; Fang, Z.; Lin, P.; Zhi, G. An evacuation model: The SGEM package. Fire Saf. J. 2004, 39, 169–190. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nat. Cell Biol. 2000, 407, 487–490. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Helbing, D. Traffic and related self-driven many-particle systems. Rev. Mod. Phys. 2001, 73, 1067–1141. [Google Scholar] [CrossRef] [Green Version]
- Guo, R.-Y.; Huang, H.-J. A modified floor field cellular automata model for pedestrian evacuation simulation. J. Phys. A Math. Theor. 2008, 41, 385104. [Google Scholar] [CrossRef]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.-P.; Xu, X. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Kumar, K.M.; Reddy, A.R.M. A fast DBSCAN clustering algorithm by accelerating neighbor searching using Groups method. Pattern Recognit. 2016, 58, 39–48. [Google Scholar] [CrossRef]
- Ren, A.; Chen, C.; Shi, J.; Zou, L. Application of virtual reality technology to evacuation simulation in fire disaster. In Proceedings of the 2006 International Conference on Computer Graphics & Virtual Reality, CGVR 2006, Las Vegas, NV, USA, 26–29 June 2006. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A* Algorithm | Ant Colony Algorithm | Corner Point Algorithm | Floyd Algorithm | |
|---|---|---|---|---|
| Real-time computing efficiency | High | Low | High | Medium |
| Path smoothness | Medium | Medium | High | Low |
| Adaptability to complex constraints | Medium | High | Medium | Low |
| Area Classification | Examples |
|---|---|
| Navigablespace | Room, Terrace, Hall |
| Doors, Corridors, Stairs | |
| Nonnavigablespace | Walls, Obstacles |
| Software and Hardware | Equipment | Details |
|---|---|---|
| Hardware | CPU | Intel(R) Core(TM) i7-5500U @ 2.40 GHz |
| RAM | 8G | |
| Graphics card | NVDIA GeForce 920M | |
| Video memory | 128 MB | |
| VR equipment | HTC VIVE | |
| OS | Windows 10 64-bit | |
| Software | Development tools | Unity2019.2.2f1 |
| Comparison | Number of Occupants | Evacuation Time | Occupants Out from Exit1 | Occupants Out from Exit2 | Occupants Out from Exit3 |
|---|---|---|---|---|---|
| Pathfinder | 20 | 40.3 | 12 | 5 | 3 |
| 40 | 46 | 17 | 15 | 7 | |
| 100 | 48 | 38 | 43 | 19 | |
| 200 | 54.8 | 87 | 77 | 36 | |
| Method in this paper without environment factors | 20 | 41.2 | 12 | 5 | 3 |
| 40 | 45.8 | 17 | 15 | 7 | |
| 100 | 48.6 | 38 | 43 | 19 | |
| 200 | 55.6 | 87 | 77 | 36 |
| Scene | N | F1 | F2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| TF1(s) | E1 | E2 | E3 | TF2(s) | E1 | E2 | E3 | ||
| Scene1 | 20 | 42 | 7 | 9 | 4 | 42.6 | 7 | 9 | 4 |
| 80 | 49.3 | 34 | 30 | 16 | 47 | 27 | 32 | 21 | |
| 160 | 59.7 | 62 | 67 | 31 | 52.0 | 47 | 63 | 50 | |
| Scene2 | 20 | 44 | 11 | 5 | 4 | 44.5 | 11 | 5 | 4 |
| 80 | 47.8 | 46 | 25 | 9 | 46.3 | 34 | 20 | 26 | |
| 160 | 60.1 | 84 | 40 | 36 | 53.2 | 66 | 37 | 57 | |
| Scene3 | 20 | 47.5 | 10 | 9 | 1 | 47.5 | 11 | 9 | 0 |
| 80 | 51.2 | 40 | 37 | 3 | 51.0 | 42 | 37 | 1 | |
| 160 | 58.0 | 82 | 71 | 7 | 58.3 | 86 | 72 | 2 | |
| Scene | N | TF1-TF2(s) | FlowT(F1) (Person/s) | FlowT(F2) (Person/s) | FlowR(E1) (Person/s) | FlowR(E2) (Person/s) | FlowR(E3) (Person/s) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| F1 | F2 | F1 | F2 | F1 | F2 | |||||
| Scene1 | 20 | −0.6 | 0.47 | 0.47 | 0.17 | 0.17 | 0.21 | 0.21 | 0.10 | 0.10 |
| 80 | 2.3 | 1.62 | 1.70 | 0.69 | 0.57 | 0.61 | 0.68 | 0.32 | 0.45 | |
| 160 | 7.7 | 2.68 | 3.07 | 1.03 | 0.90 | 1.12 | 1.21 | 0.51 | 0.96 | |
| Scene2 | 20 | −0.5 | 0.45 | 0.45 | 0.25 | 0.25 | 0.11 | 0.11 | 0.09 | 0.09 |
| 80 | 1.5 | 1.67 | 1.73g | 0.96 | 0.73 | 0.52 | 0.43 | 0.18 | 0.56 | |
| 160 | 6.9 | 2.66 | 3.01 | 1.39 | 1.24 | 0.67 | 0.70 | 0.60 | 1.07 | |
| Scene3 | 20 | 0.0 | 0.42 | 0.42 | 0.20 | 0.23 | 0.19 | 0.19 | 0.02 | 0.00 |
| 80 | 0.2 | 1.56 | 1.56 | 0.78 | 0.82 | 0.72 | 0.72 | 0.03 | 0.02 | |
| 160 | −0.3 | 2.75 | 2.74 | 1.41 | 1.48 | 1.22 | 1.23 | 0.12 | 0.03 | |
| Experience Way | Fluency (P1) | Interactive Experience (P2) | Visual Reliability of Personnel Behavior (P3) | Panic (P4) |
|---|---|---|---|---|
| Pathfinder 3D viewer | 3.87 | 2.33 | 3.88 | 2.41 |
| VR system | 3.74 | 4.12 | 3.75 | 3.88 |
| Index | Mean | Std. Deviation | t | df | Sig. (2-Tailed) |
|---|---|---|---|---|---|
| P1 | −0.250 | 1.189 | −1.030 | 23 | 0.314 |
| P2 | −1.792 | 1.250 | −7.020 | 23 | 0.000 |
| P3 | 0.125 | 1.191 | 0.514 | 23 | 0.612 |
| P4 | −1.458 | 1.414 | −5.054 | 23 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zhu, J.; Wang, Y.; Chai, J.; Li, W.; Fu, L.; Xu, B.; Gong, Y. A Virtual Reality Simulation Method for Crowd Evacuation in a Multiexit Indoor Fire Environment. ISPRS Int. J. Geo-Inf. 2020, 9, 750. https://doi.org/10.3390/ijgi9120750
Guo Y, Zhu J, Wang Y, Chai J, Li W, Fu L, Xu B, Gong Y. A Virtual Reality Simulation Method for Crowd Evacuation in a Multiexit Indoor Fire Environment. ISPRS International Journal of Geo-Information. 2020; 9(12):750. https://doi.org/10.3390/ijgi9120750
Chicago/Turabian StyleGuo, Yukun, Jun Zhu, Yu Wang, Jinchuan Chai, Weilian Li, Lin Fu, Bingli Xu, and Yuhang Gong. 2020. "A Virtual Reality Simulation Method for Crowd Evacuation in a Multiexit Indoor Fire Environment" ISPRS International Journal of Geo-Information 9, no. 12: 750. https://doi.org/10.3390/ijgi9120750
APA StyleGuo, Y., Zhu, J., Wang, Y., Chai, J., Li, W., Fu, L., Xu, B., & Gong, Y. (2020). A Virtual Reality Simulation Method for Crowd Evacuation in a Multiexit Indoor Fire Environment. ISPRS International Journal of Geo-Information, 9(12), 750. https://doi.org/10.3390/ijgi9120750