Analysing the Police Patrol Routing Problem: A Review




Abstract
:
1. Introduction
2. The Peculiarities of the Police Patrol Routing Problem
3. Starting Point: The Dynamic Vehicle Routing Problem
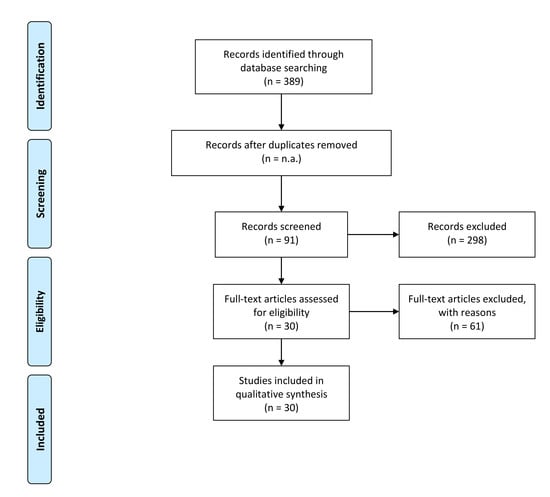
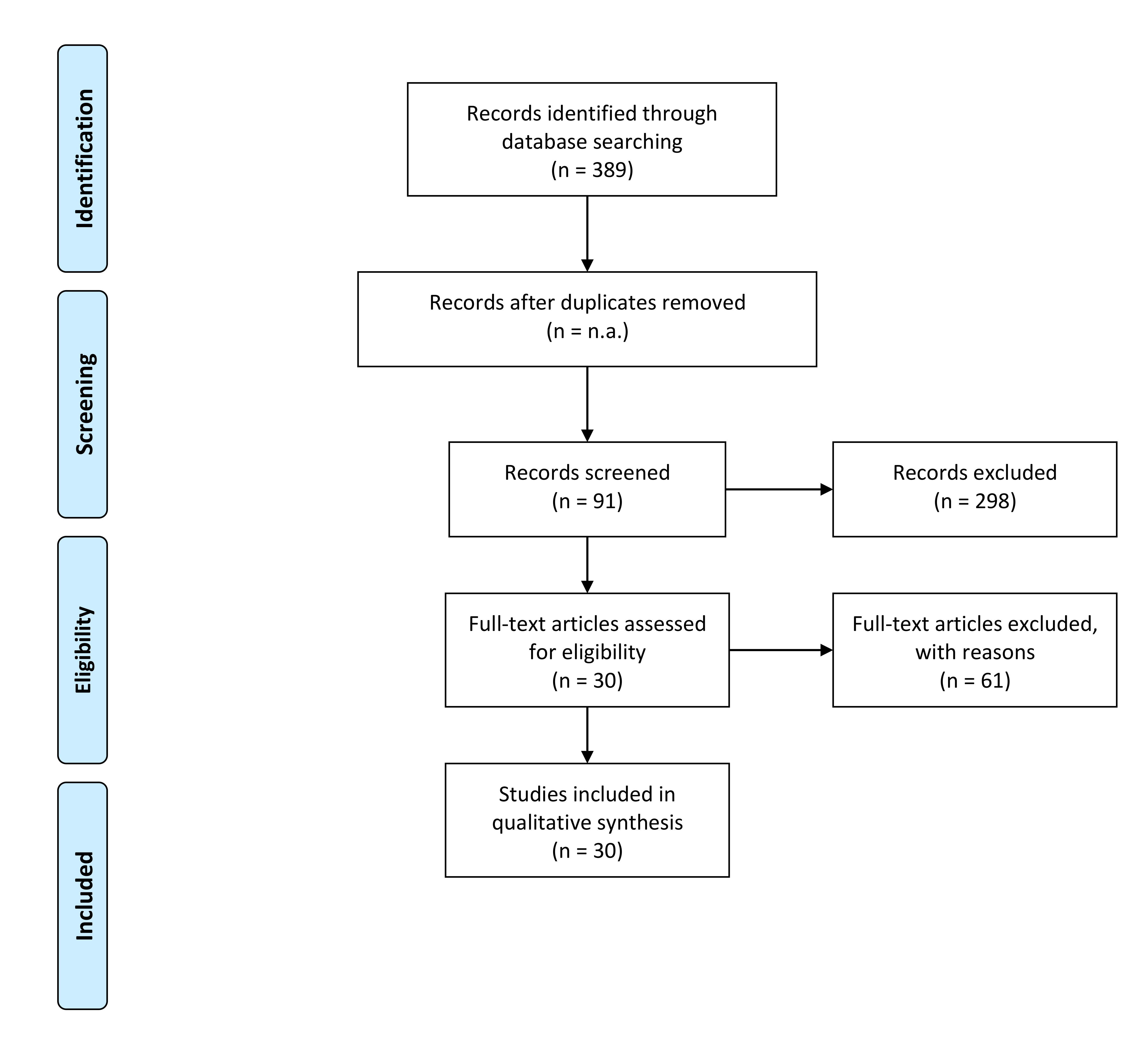
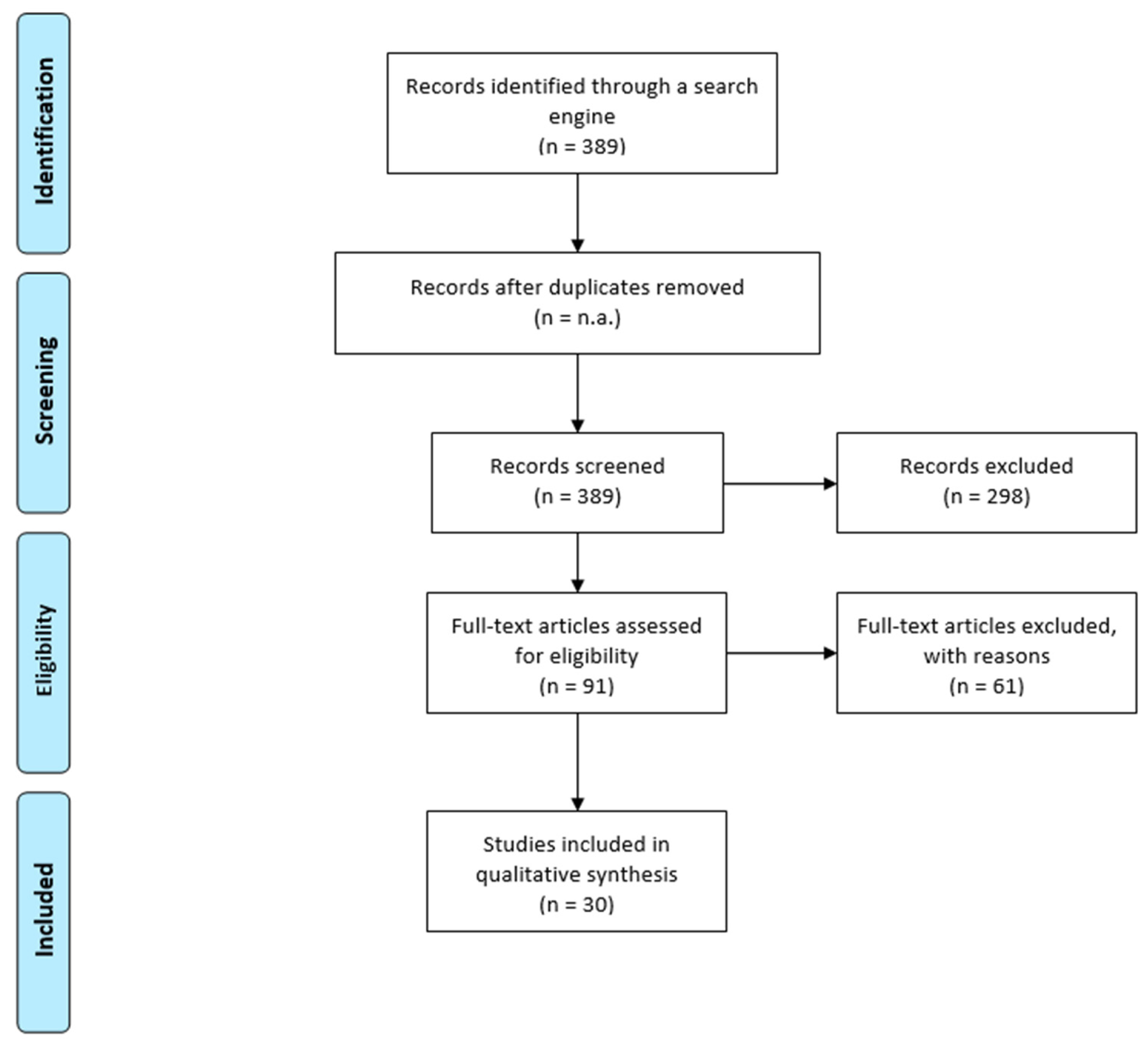
4. In Search for Literature Linking the PPRP to the DVRP
5. Main Findings
5.1. Police Patrol Routing and the Literature on the DVRP
5.2. Classifications of Solution Methods for Stochastic DVRPs
5.2.1. Sequential and Parallel Algorithms
5.2.2. Path-Based and Time-Based Optimization Methods
5.2.3. Solution Methods for Deterministic Versus Stochastic DVRPs
5.3. Application of Solution Methods
5.4. Performance Evaluation of the Solution Methods
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anselin, L.; Griffiths, E.; Tita, G. Crime mapping and hot spot analysis. In Environmental Criminology and Crime Analysis; Wortley, R., Mazerolle, L., Eds.; Willan Publishing: Devon, UK, 2008; pp. 97–116. ISBN 9781317487104. [Google Scholar]
- Wain, N.; Ariel, B. Tracking of police patrol. Policing 2014, 8, 274–283. [Google Scholar] [CrossRef]
- Ozkan, T. Criminology in the age of data explosion: New directions. Soc. Sci. J. 2019, 56, 208–219. [Google Scholar] [CrossRef]
- Davies, T.; Bowers, K. Patterns in the supply and demand of urban policing at the street segment level. Polic. Soc. 2019, 1–23. [Google Scholar] [CrossRef]
- Ghiani, G.; Guerriero, F.; Laporte, G.; Musmanno, R. Real-time vehicle routing: Solution concepts, algorithms and parallel computing strategies. Eur. J. Oper. Res. 2003, 151, 1–11. [Google Scholar] [CrossRef]
- Ichoua, S.; Gendreau, M.; Potvin, J.-Y. Diversion issues in real-time vehicle dispatching. Transp. Sci. 2000, 34, 426–438. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Cheng, T.; Wise, S. Designing daily patrol routes for policing based on ant colony algorithm. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Kuala Lumpur, Malaysia, 28–30 October 2015; Volume II-4/W2, pp. 103–109. [Google Scholar]
- Takamiya, M.; Watanabe, T. Planning high responsive police patrol routes with frequency constraints. In Proceedings of the Proceedings of the 5th International Conference on Ubiquitous Information Management and Communication, Seoul, Korea, 21–23 February 2011; p. 8. [Google Scholar]
- Felson, M.; Eckert, M.A. Introductory Criminology: The Study of Risky Situations, 1st ed.; Routledge: New York, NY, USA, 2017; ISBN 9781315618739. [Google Scholar]
- Kelling, G.L.; Pate, T.; Dieckman, D.; Brown, C.E. The Kansas City Preventive Patrol Experiment; Police Foundation: Washington, DC, USA, 1974. [Google Scholar]
- Pillac, V.; Gendreau, M.; Guéret, C.; Medaglia, A.L. A review of dynamic vehicle routing problems. Eur. J. Oper. Res. 2013, 225, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Larsen, A.; Madsen, O.B.G.; Solomon, M.M. Partially dynamic vehicle routing-models and algorithms. J. Oper. Res. Soc. 2002, 53, 637–646. [Google Scholar] [CrossRef]
- Humagain, S.; Sinha, R.; Lai, E.; Ranjitkar, P. A systematic review of route optimisation and pre-emption methods for emergency vehicles. Transp. Rev. 2019, 0, 1–19. [Google Scholar] [CrossRef]
- Andresen, M.A.; Malleson, N. Police foot patrol and crime displacement: A local analysis. J. Contemp. Crim. Justice 2014, 30, 186–199. [Google Scholar] [CrossRef]
- Koper, C.S. Just enough police presence: Reducing crime and disorderly behavior by optimizing patrol time in crime hot spots. Justice Q. 1995, 12, 649–672. [Google Scholar] [CrossRef]
- Telep, C.W.; Weisburd, D.; Wire, S.; Farrington, D. Protocol: Increased Police Patrol Presence Effects on Crime and Disorder; Campbell Collaboration: Phoenix, AZ, USA, 2016. [Google Scholar]
- Wu, X.; Lum, C. Measuring the spatial and temporal patterns of police proactivity. J. Quant. Criminol. 2017, 33, 915–934. [Google Scholar] [CrossRef]
- Wise, S.C.; Cheng, T. How officers create guardianship: An agent-based model of policing. Trans. GIS 2016, 20, 790–806. [Google Scholar] [CrossRef] [Green Version]
- Felson, M.; Clarke, R.V. Opportunity makes the thief: Practical theory for crime prevention. Polic. Reducing Crime Unit Police Res. Ser. 1998, 98, 36. [Google Scholar]
- Braga, A.A.; Papachristos, A.V.; Hureau, D.M. The effects of hot spots policing on crime: An updated systematic review and meta-analysis. Justice Q. 2014, 31, 633–663. [Google Scholar] [CrossRef]
- Reis, D.; Melo, A.; Coelho, A.L.V.; Furtado, V. Towards optimal police patrol routes with genetic algorithms. ISI 2006 Intell. Secur. Informatics 2006, 3975, 485–491. [Google Scholar]
- Chawathe, S.S. Organizing hot-spot police patrol routes. In Proceedings of the IEEE Intelligence and Security Informatics; IEEE: New Brunswick, NJ, USA, 2007; pp. 79–86. [Google Scholar]
- Davies, T.; Bowers, K. Quantifying the Deterrent Effect of Police Patrol via GPS Analysis. In GIS Research UK; GISRUK: Leeds, UK, 2015; p. 4. [Google Scholar]
- Wuschke, K.E.; Andresen, M.A.; Brantingham, P.J.; Rattenbury, C.; Richards, A. What do police do and where do they do it? Int. J. Police Sci. Manag. 2017, 20, 19–27. [Google Scholar] [CrossRef]
- Eck, J.E.; Chainey, S.; Cameron, J.G.; Leitner, M.; Wilson, R.E. Mapping Crime: Understanding Hot Spots; U.S. Department of Justice Office of Justice Programs: Washington, DC, USA, 2005.
- Weisburd, D.L.; Telep, C.W.; Braga, A. a. The Importance of Place in Policing: Empirical Evidence and Policy Recommendations; Brottsförebyggande rådet: Stockholm, Sweden, 2010; ISBN 9789186027544. [Google Scholar]
- Ruan, S.; Meirina, C.; Yu, F.; Pattipati, K.R.; Popp, R.L. Patrolling in a Stochastic Environment; Connecticut Univ Storrs Dept Of Electrical Engineering And Computer Science: Mansfield, CT, USA, 2005. [Google Scholar]
- Jagtenberg, C.J.; Bhulai, S.; van der Mei, R.D. An efficient heuristic for real-time ambulance redeployment. Oper. Res. Health Care 2015, 4, 27–35. [Google Scholar] [CrossRef] [Green Version]
- Sacks, S.R. Optimal spatial deployment of police patrol cars. Soc. Sci. Comput. Rev. 2000, 18, 40–55. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, J.; Hoover, L.T. What conditions affect police response time? Examining situational and neighborhood Factors. Police Q. 2017, 20, 61–80. [Google Scholar] [CrossRef]
- Andresen, M.A.; Malleson, N. Crime seasonality and its variations across space. Appl. Geogr. 2013, 43, 25–35. [Google Scholar] [CrossRef]
- Brunsdon, C.; Corcoran, J. Using circular statistics to analyse time patterns in crime incidence. Comput. Environ. Urban Syst. 2006, 30, 300–319. [Google Scholar] [CrossRef]
- Ariel, B.; Weinborn, C.; Sherman, L.W. “Soft” policing at hot spots — do police community support officers work? A randomized controlled trial. J. Exp. Criminol. 2016, 12, 277–317. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.G.M.; Ang, M.H.J. Probabilistic Ants (PAnts) in multi-agent patrolling. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1371–1376. [Google Scholar]
- Azimi, S.A.Z.; Bashiri, M. Modeling police patrol routing and its problem-solving technique based on the ant colony optimization algorithm (case study: Iran’s police). Res. J. Appl. Sci. 2016, 11, 536–546. [Google Scholar]
- Telep, C.W.; Weisburd, D. What is known about the effectiveness of police practices in reducing crime and disorder? Police Q. 2012, 15, 331–357. [Google Scholar] [CrossRef]
- Leigh, J.; Dunnett, S.; Jackson, L. Predictive police patrolling to target hotspots and cover response demand. Ann. Oper. Res. 2017, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.-S.; Lou, T. Improving highway accident management through patrol beat scheduling. Polic. An Int. J. Police Strateg. Manag. 2014, 37, 108–125. [Google Scholar] [CrossRef]
- Li, L.; Jiang, Z.; Duan, N.; Dong, W.; Hu, K.; Sun, W. Police patrol service optimization based on the spatial pattern of hotspots. In Proceedings of the 2011 IEEE International Conference on Service Operations, Logistics and Informatics, Beijing, China, 10–12 July 2011; pp. 45–50. [Google Scholar]
- Yassen, E.T.; Arram, A.; Ayob, M.; Nazri, M.Z.A. A constructive heuristic for police patrol routing problems. Pertanika J. Sci. Technol. 2017, 25, 87–96. [Google Scholar]
- Chen, X.; Yum, T.-S.P. Cross entropy approach for patrol route planning in dynamic environments. In Proceedings of the 2010 IEEE International Conference on Intelligence and Security Informatics, Vancouver, BC, Canada, 23–26 May 2010; pp. 114–119. [Google Scholar]
- Chen, H. Developing Police Patrol Strategies Based on the Urban Street Network; University College London: London, UK, 2019. [Google Scholar]
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Baldacci, R.; Toth, P.; Vigo, D. Recent advances in vehicle routing exact algorithms. 4or 2007, 5, 269–298. [Google Scholar] [CrossRef]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. Vehicle Routing: Problems, Methods, and Applications, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2014; ISBN 978-1-61197-358-7. [Google Scholar]
- Larsen, A.; Madsen, O.B.G.; Solomon, M.M. Classification of dynamic vehicle routing systems. Oper. Res. Comput. Sci. Interfaces Ser. 2007, 38, 19–40. [Google Scholar]
- Sabar, N.R.; Bhaskar, A.; Chung, E.; Turky, A.; Song, A. A self-adaptive evolutionary algorithm for dynamic vehicle routing problems with traffic congestion. Swarm Evol. Comput. 2019, 44, 1018–1027. [Google Scholar] [CrossRef]
- De Armas, J.; Melián-Batista, B. Variable neighborhood search for a Dynamic Rich Vehicle Routing Problem with time windows. Comput. Ind. Eng. 2015, 85, 120–131. [Google Scholar] [CrossRef]
- Akhand, M.A.H.; Peya, Z.J.; Sultana, T. Al-Mahmud Solving Capacitated Vehicle Routing Problem with route optimization using Swarm Intelligence. In Proceedings of the 2015 2nd International Conference on Electrical Information and Communication Technologies (EICT), Khulna, Bangladesh, 10–12 December 2016; pp. 112–117. [Google Scholar]
- Psaraftis, H.N. Dynamic vehicle routing problems. Veh. Routing Methods Stud. 1988, 223–248. [Google Scholar]
- Psaraftis, H.N.; Wen, M.; Kontovas, C.A. Dynamic vehicle routing problems: three decades and counting. Networks 2016, 67, 3–31. [Google Scholar] [CrossRef] [Green Version]
- Wilson, N.H.M.; Colvin, N.J. Computer Control of the Rochester Dial-A-Ride System; Massachusetts Institute of Technology Center for Transportation Studies: Cambridge, MA, USA, 1977. [Google Scholar]
- Psaraftis, H.N. Dynamic Programming Solution to the Single Vehicle Many-To-Many Immediate Request Dial-a-Ride Problem. Transp. Sci. 1980, 14, 130–154. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Kumar, S.; Lobiyal, D.K.; Tiwari, P.K.; Abdullah, A.H.; Hassan, A.N. Multiobjective dynamic vehicle routing problem and time seed based solution using particle swarm optimization. J. Sens. 2015, 2015. [Google Scholar] [CrossRef]
- AbdAllah, A.M.F.M.; Essam, D.L.; Sarker, R.A. On solving periodic re-optimization dynamic vehicle routing problems. Appl. Soft Comput. J. 2017, 55, 1–12. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, T.P. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Med. 2009, 6, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jotshi, A.; Gong, Q.; Batta, R. Dispatching and routing of emergency vehicles in disaster mitigation using data fusion. Socioecon. Plann. Sci. 2009, 43, 1–24. [Google Scholar] [CrossRef]
- Llinas, J. Information fusion for natural and man-made disasters. In Proceedings of the Proceedings of the 5th International Conference on Information Fusion, FUSION 2002, Annapolis, MD, USA, 8–11 July 2002; pp. 570–576. [Google Scholar]
- Vandeviver, C.; Bernasco, W. The geography of crime and crime control. Appl. Geogr. 2017, 86, 220–225. [Google Scholar] [CrossRef]
- Shinde, V.; Naik, R.B.; Kulkarni, K. Profit and Penalty Based Real Time Scheduler for EMS. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 4977–4981. [Google Scholar]
- Baykasoğlu, A.; Subulan, K.; Taşan, A.S.; Dudaklı, N. A review of fleet planning problems in single and multimodal transportation systems. Transp. A Transp. Sci. 2019, 15, 631–697. [Google Scholar] [CrossRef]
- Schorpp, S. Chapter 2: Dynamic Transportation Problems. In Dynamic Fleet Management for International Truck Transportation; Springer: Berlin, Germany, 2011; pp. 11–29. ISBN 9783834966759. [Google Scholar]
- Watanabe, T.; Takamiya, M. Police patrol routing on Network Voronoi Diagram. In Proceedings of the Proceedings of the 8th International Conference on Ubiquitous Information Management and Communication, Siem Reap, Cambodia, January 2014; p. 8. [Google Scholar]
- Khouadjia, M.R.; Sarasola, B.; Alba, E.; Talbi, E.G.; Jourdan, L. Metaheuristics for dynamic vehicle routing. In Metaheuristics for Dynamic Optimization; Alba, E., Nakib, A., Siarry, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 433, pp. 265–289. ISBN 9783642306648. [Google Scholar]
- Patrascu, M.; Constantinescu, V.; Ion, A. Controlling emergency vehicles in urban traffic with genetic algorithms. In Proceedings of the Proceedings of The 9th EUROSIM & the 57th SIMS; Linköping University Electronic Press: Oulu, Finland, 2018; pp. 243–250. [Google Scholar]
- Billhardt, H.; Fernández, A.; Lemus, L.; Lujak, M.; Osman, N.; Ossowski, S.; Sierra, C. Dynamic coordination in fleet management systems: Toward smart cyber fleets. IEEE Intell. Syst. 2014, 29, 70–76. [Google Scholar] [CrossRef] [Green Version]
- Billhardt, H.; Fernandez, A.; Lujak, M.; Ossowski, S.; Julian, V.; De Paz, J.F.; Hernandez, J.Z. Coordinating open fleets. A taxi assignment example. AI Commun. 2017, 30, 37–52. [Google Scholar] [CrossRef]
- Sbihi, A.; Eglese, R.W. The Relationship between Vehicle Routing and Scheduling and Green Logistics: A Literature Survey. 2007. Available online: https://eprints.lancs.ac.uk/id/eprint/48900 (accessed on 24 March 2020).
- Bertsimas, D.J.; van Ryzin, G. Stochastic and Dynamic Vehicle Routing in the Euclidean Plane: The Multiple-Server, Capacitated Vehicle Case. 1990. Available online: https://dspace.mit.edu/bitstream/handle/1721.1/5220/OR-224-90.pdf?sequence=1 (accessed on 24 March 2020).
- Bertsimas, D.J.; van Ryzin, G. A Stochastic and dynamic vehicle routing problem in the euclidean plane. Oper. Res. 1991, 39, 601–615. [Google Scholar] [CrossRef]
- Gendreau, M.; Laporte, G.; Semet, F. The maximal expected coverage relocation problem for emergency vehicles. J. Oper. Res. Soc. 2006, 57, 22–28. [Google Scholar] [CrossRef]
- Shen, Y.; Lee, J.; Jeong, H.; Jeong, J.; Lee, E.; Du, D.H.C. SAINT+: Self-adaptive interactive navigation tool+ for emergency service delivery optimization. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1038–1053. [Google Scholar] [CrossRef]
- Yong, G.; Xinping, Y. A dispatch model of emergency vehicles based on stochastic travel time. In Proceedings of the The Eighth International Conference of Chinese Logistics and Transportation Professionals, Chengdu, China, 31 July–3 August 2008; pp. 1565–1570. [Google Scholar]
- Benyahia, I.; Potvin, J.-Y. A framework architecture for information management in dynamic vehicle dispatching. In Proceedings of the Proceedings of the 34th Hawaii International Conference on System Sciences, Maui, HI, USA, 6 January 2001; pp. 1–8. [Google Scholar]
- Ren, C. Solving min-max vehicle routing problem. J. Softw. 2011, 6, 1851–1856. [Google Scholar] [CrossRef]
- Bouziyane, B.; Dkhissi, B.; Cherkaoui, M. Solving a dynamic vehicle routing problem with soft time windows based on static problem resolution by a hybrid approach. Int. J. Supply Oper. Manag. 2018, 5, 134–151. [Google Scholar]
- Pillac, V.; Guéret, C.; Medaglia, A. Dynamic Vehicle Routing Problems: State Of The Art and Prospects. 2011. Available online: https://hal.archives-ouvertes.fr/hal-00623474/ (accessed on 24 March 2020).
- Benyahia, I.; Potvin, J.-Y. Decision support for vehicle dispatching using genetic programming. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 1998, 28, 306–314. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Li, Y. Research on the method of dynamic emergency rescue vehicle routing based on real-time information. In Proceedings of the International Conference on E-Business Intelligence, Singapore, 19–21 December 2010; pp. 105–112. [Google Scholar]
- Wang, Z.; Zlatanova, S. Multi-agent infrastructure assisting navigation for first responders. In Proceedings of the Proceedings of the 6th ACM SIGSPATIAL International Workshop on Computational Transportation Science, Orlando, FL, USA, 5–8 November 2013; pp. 1–6. [Google Scholar]
- Haghani, A.; Tian, Q.; Hu, H. Simulation model for real-time emergency vehicle dispatching and routing. Transp. Res. Rec. J. Transp. Res. Board 2004, 1882, 176–183. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.-Y. Evaluation framework for dynamic vehicle routing strategies under real-time information. Transp. Res. Rec. J. Transp. Res. Board 2001, 1774, 115–122. [Google Scholar] [CrossRef]
- Pagès, L.; Jayakrishnan, R.; Cortés, C.E. Real-time mass passenger transport network optimization problems. Transp. Res. Rec. J. Transp. Res. Board 2006, 1964, 229–237. [Google Scholar] [CrossRef]
- Petroff, T.M. Vehicle dispatching method and system 2014. U.S. Patent No. 8,626,565, 7 January 2014. [Google Scholar]
- Ferrucci, F. Introduction to tour Planning: Vehicle routing and related problems. In Pro-Active Dynamic Vehicle Routing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 15–79. ISBN 9783642334726. [Google Scholar]
- Sherman, L.W.; Weisburd, D. General deterrent effects of police patrol in crime “hot spots”: A randomized, controlled trial. Justice Q. 1995, 12, 625–648. [Google Scholar] [CrossRef]
- Weisburd, D.; Eck, J.E. What can police do to reduce crime, disorder, and fear? Ann. Am. Acad. Pol. Soc. Sci. 2004, 593, 42–65. [Google Scholar] [CrossRef]
- Ritzinger, U.; Puchinger, J.; Hartl, R.F. A survey on dynamic and stochastic vehicle routing problems. Int. J. Prod. Res. 2016, 54, 215–231. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
| Type | Solution Methods | Articles |
|---|---|---|
| Dynamic Vehicle Routing Problem | Routing policies, (hybrid) GA, optimization strategies, heuristic optimization methods, shortest path algorithm, local search | [64,66,70,71,73,76,77,80,81,82,83,84] |
| Dynamic Vehicle Dispatching Problem | Genetic programming, GA, response strategies, a dynamic assignment strategy, linear programming, reinforcement learning | [6,74,75,79,82,85] |
| Dynamic fleet management system | Routing policies, a decentralized algorithm | [67,68] |
| Patrol beat scheduling | A chance-constrained optimization model | [38] |
| The maximal expected coverage relocation problem | A single integer linear program | [72] |
| Classification of solution methods on the DVRP | Simple policies, classical insertion procedures, (meta)heuristics, … | [5,12,13,47,55,65,69,78,86] |
| Solution Method | Advantages | Limitations |
|---|---|---|
| (Hybrid) Genetic Algorithm |
|
|
| Routing Policies |
|
|
| Local Search based on Network Voronoi Diagram |
|
|
| Approximate Dynamic Programming |
|
|
| Multiple Scenario Approach |
|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dewinter, M.; Vandeviver, C.; Vander Beken, T.; Witlox, F. Analysing the Police Patrol Routing Problem: A Review. ISPRS Int. J. Geo-Inf. 2020, 9, 157. https://doi.org/10.3390/ijgi9030157
Dewinter M, Vandeviver C, Vander Beken T, Witlox F. Analysing the Police Patrol Routing Problem: A Review. ISPRS International Journal of Geo-Information. 2020; 9(3):157. https://doi.org/10.3390/ijgi9030157
Chicago/Turabian StyleDewinter, Maite, Christophe Vandeviver, Tom Vander Beken, and Frank Witlox. 2020. "Analysing the Police Patrol Routing Problem: A Review" ISPRS International Journal of Geo-Information 9, no. 3: 157. https://doi.org/10.3390/ijgi9030157
APA StyleDewinter, M., Vandeviver, C., Vander Beken, T., & Witlox, F. (2020). Analysing the Police Patrol Routing Problem: A Review. ISPRS International Journal of Geo-Information, 9(3), 157. https://doi.org/10.3390/ijgi9030157