A Multi-Scale Representation of Point-of-Interest (POI) Features in Indoor Map Visualization



Abstract
:1. Introduction
2. Materials and Methods
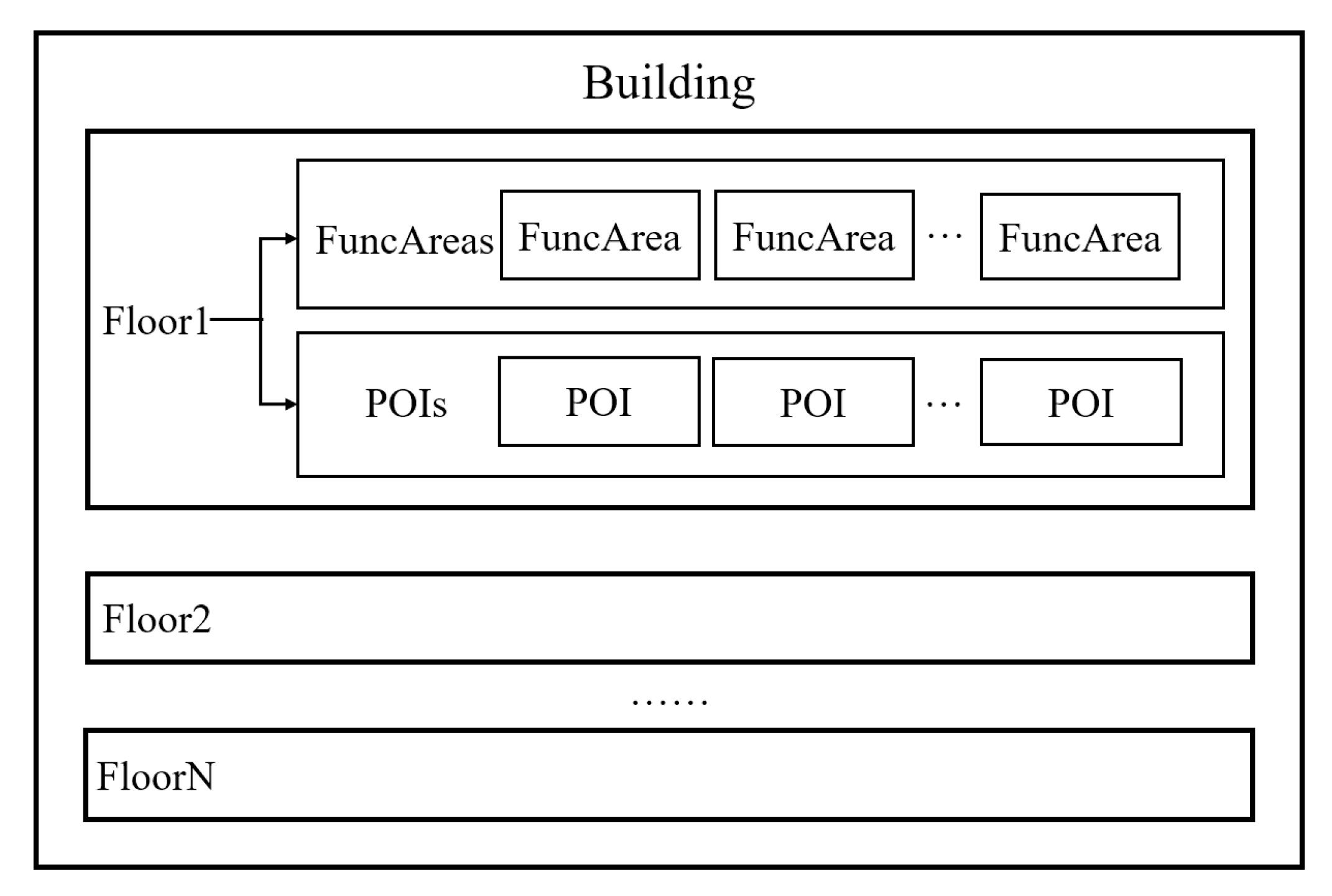
2.1. Indoor Map Data
2.2. Indoor 3D Map Visualization
2.2.1. Feature Selection and Classification
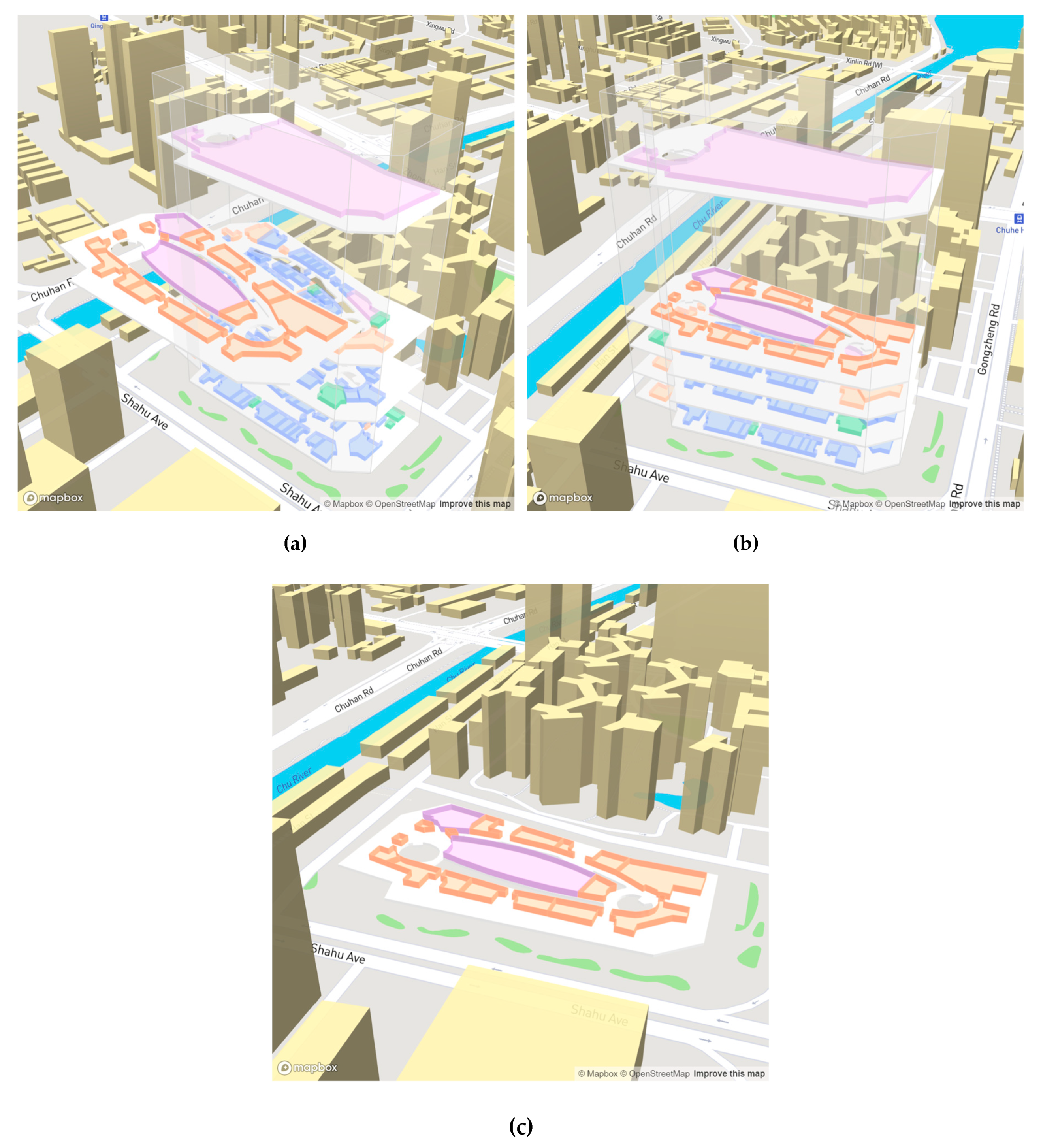
2.2.2. Multi-Scale Data Modeling and Generalization
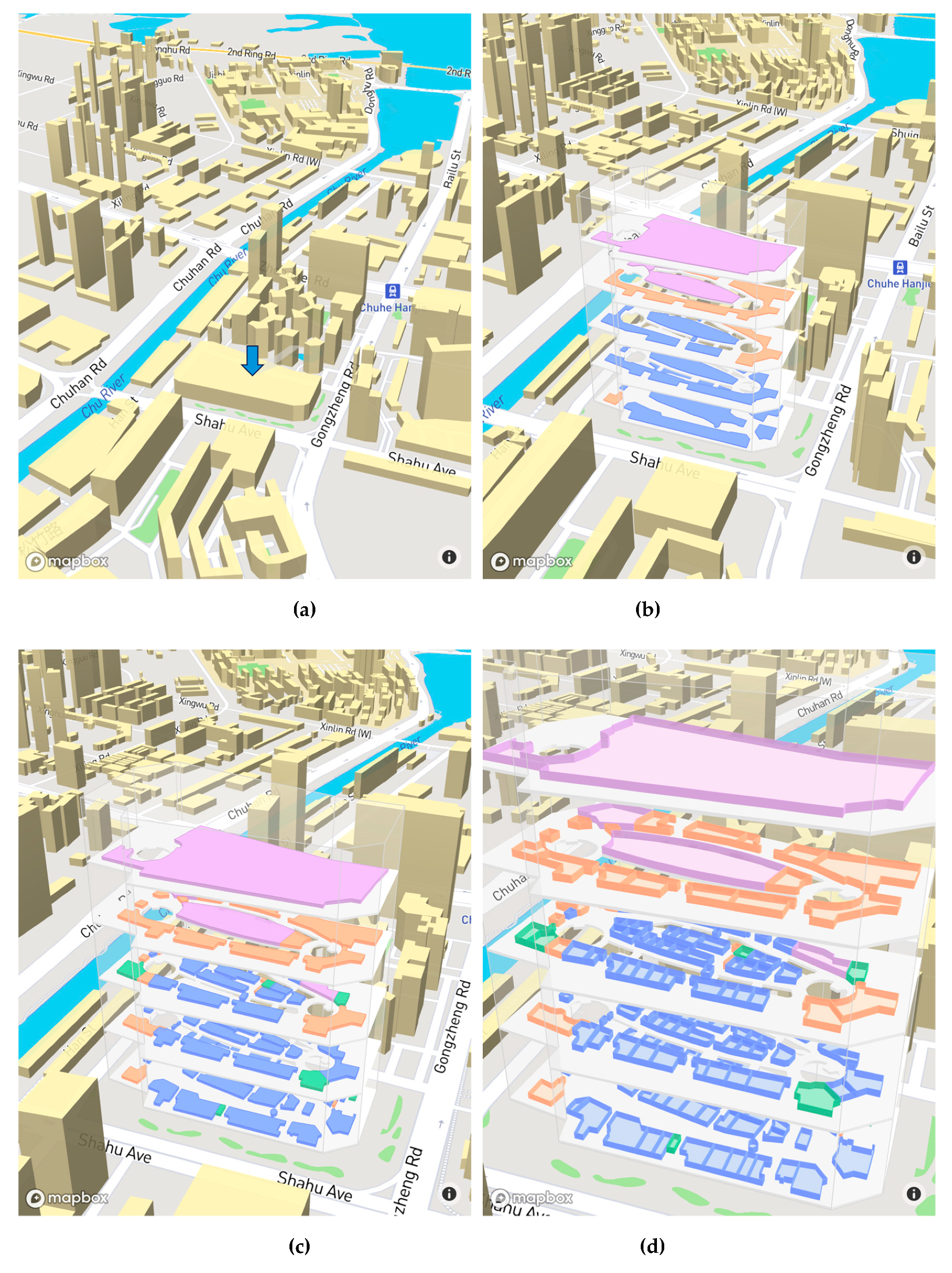
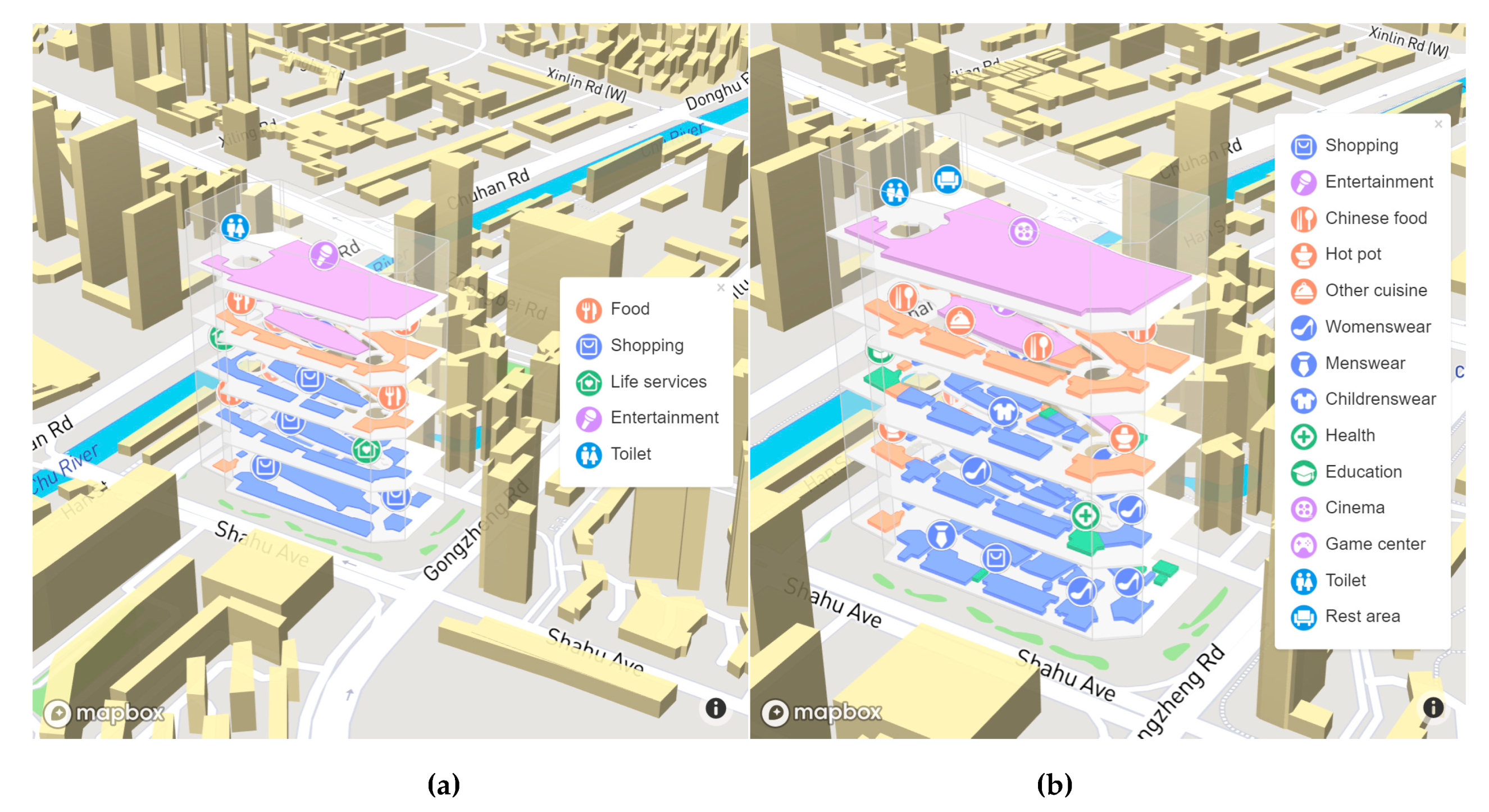
2.2.3. 3D Visualization
2.3. Indoor POI Visualization
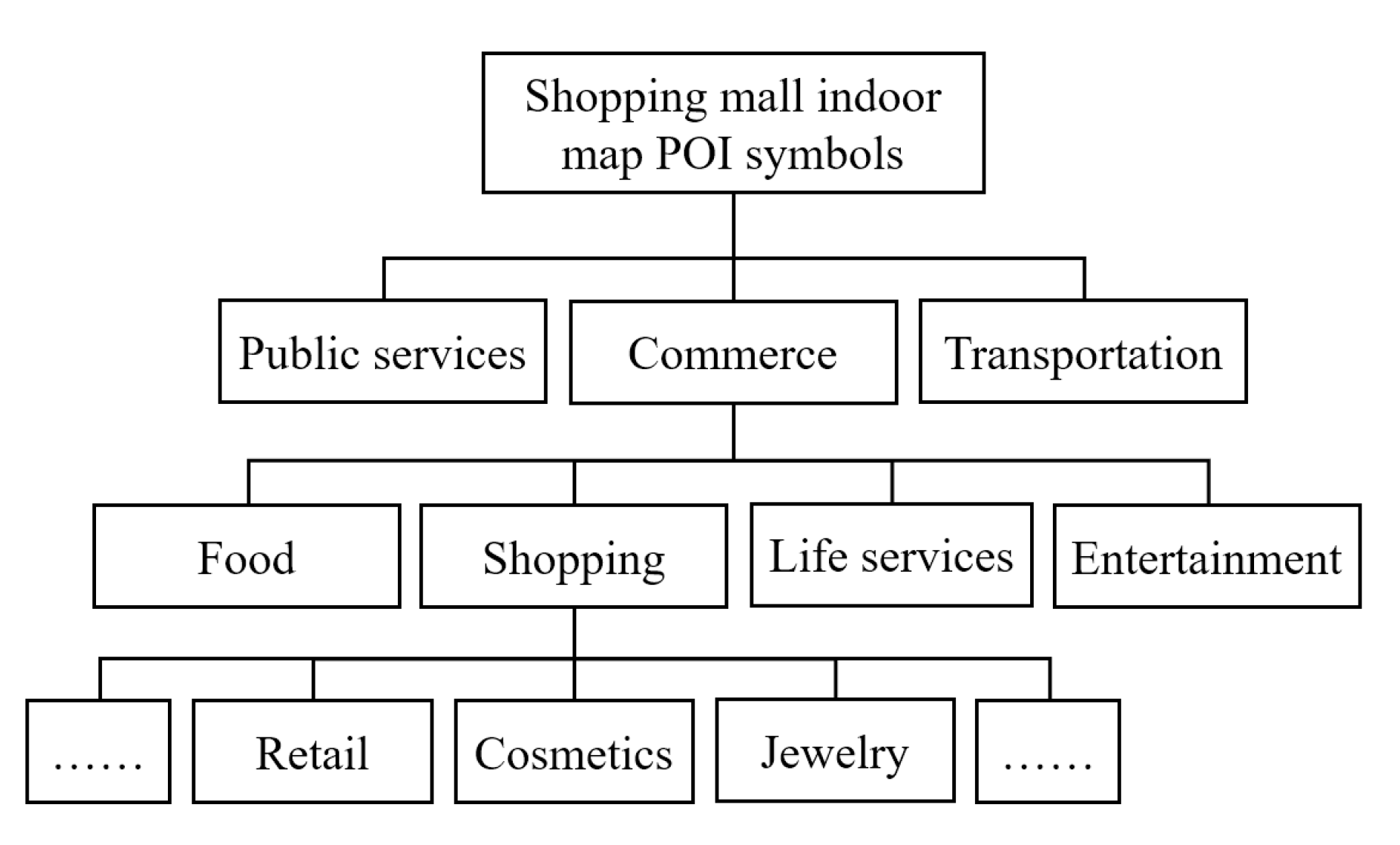
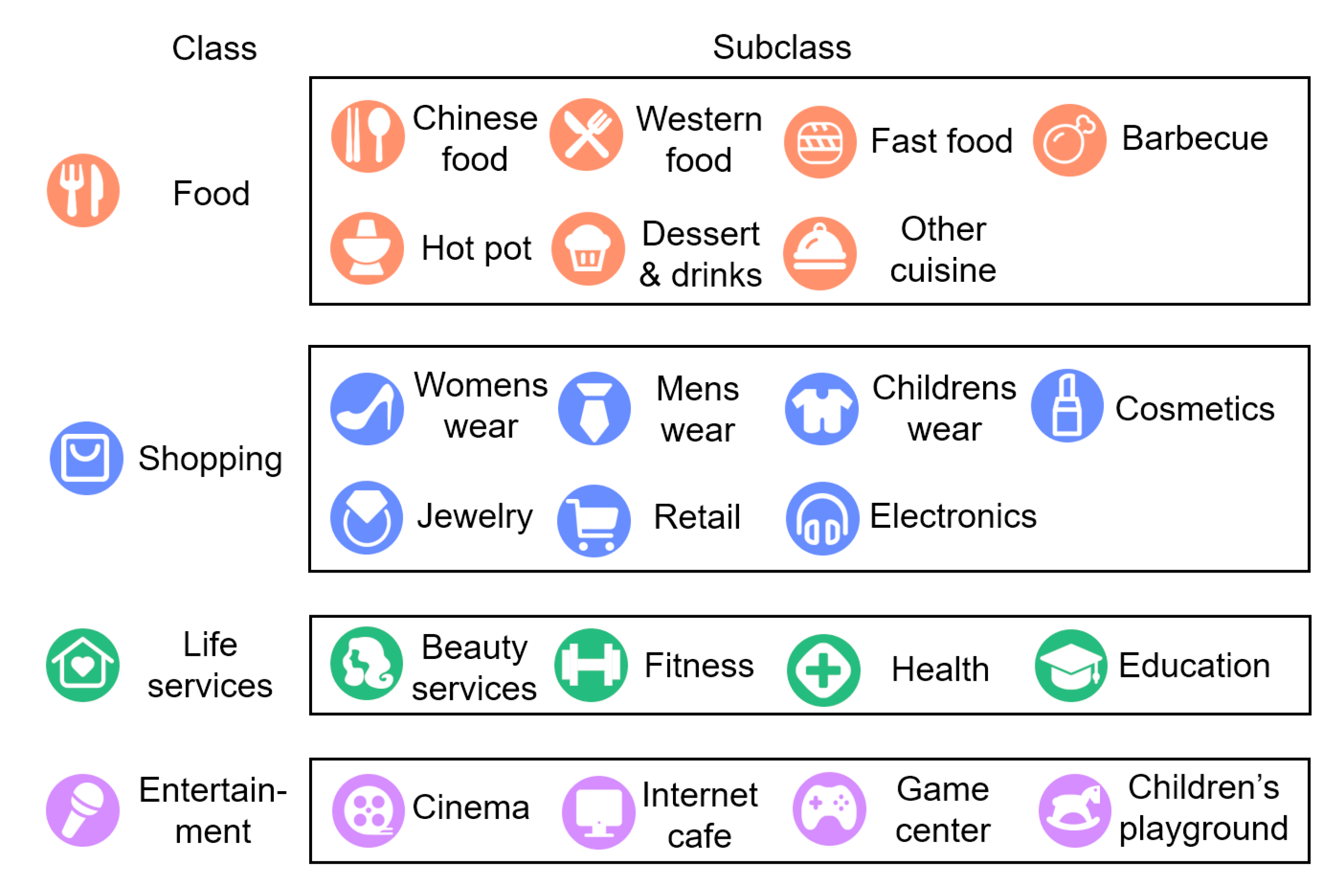
2.3.1. Hierarchical POI Classification
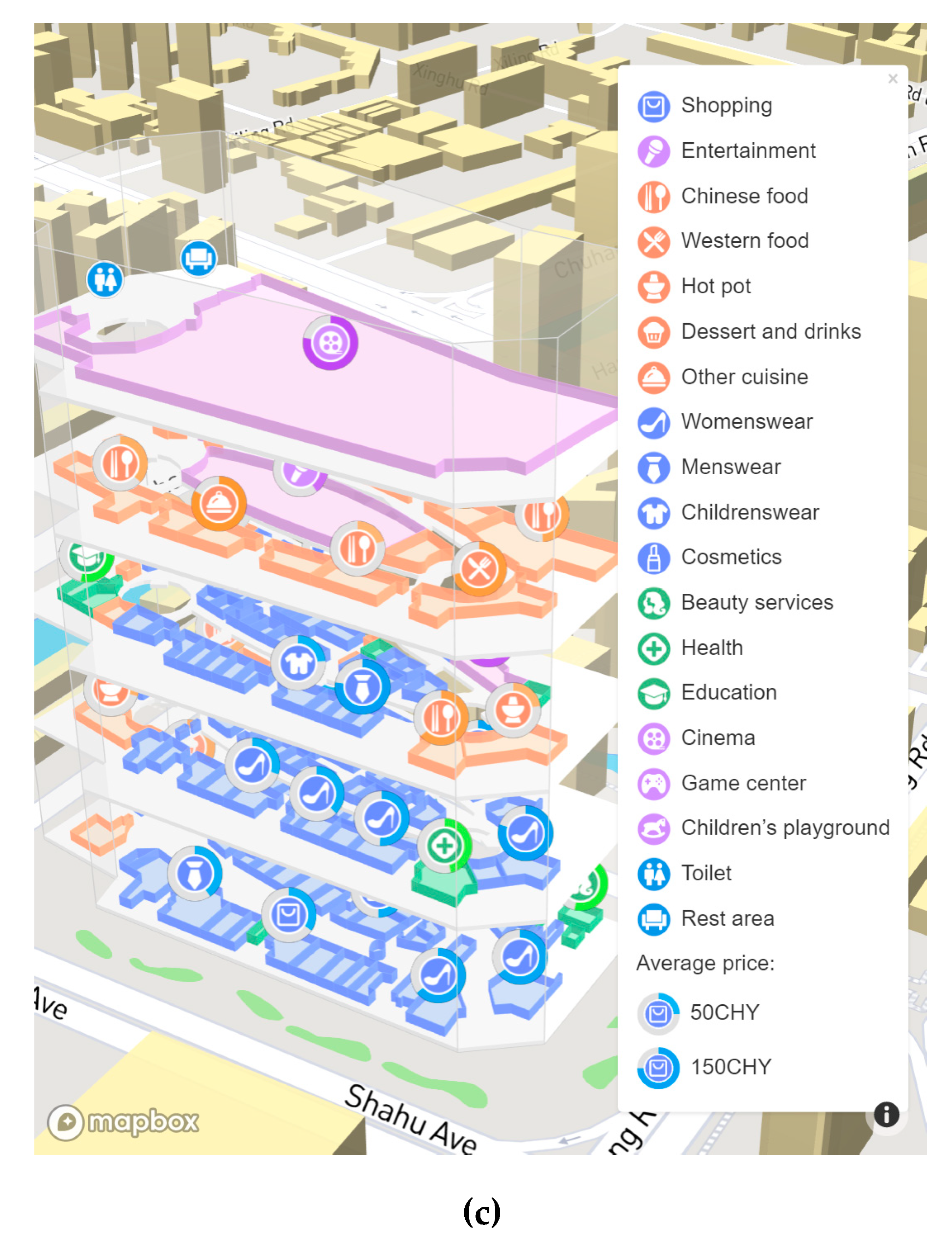
2.3.2. Adaptive POI Selection
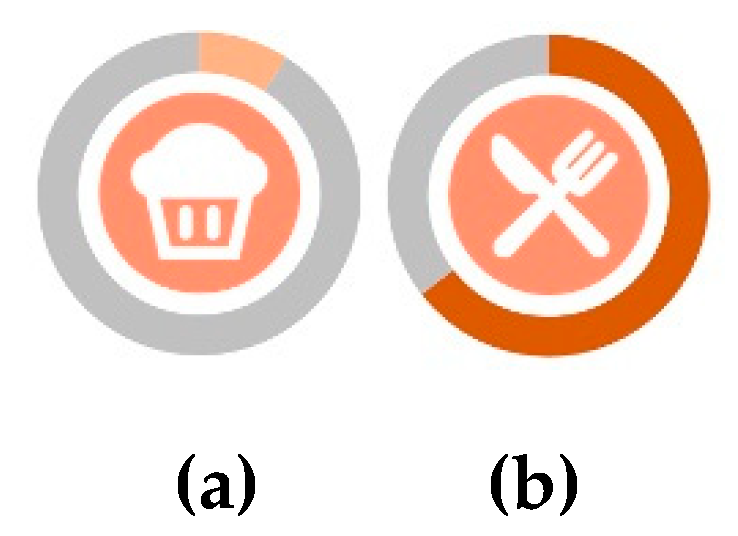
2.3.3. POI Symbol Design
3. Results
3.1. System Design and Performance
3.2. Experimental Results and Analysis
3.3. Comparative Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Looking Forward: Five Thoughts on the Future of GIS. Available online: https://www.esri.com/news/arcwatch/0211/future-of-gis.html (accessed on 8 October 2019).
- Kim, K.; Lee, K. Handling Points of Interest (POIs) on a Mobile Web Map Service Linked to Indoor Geospatial Objects: A Case Study. ISPRS Int. J. Geo. Inf. 2018, 7, 216. [Google Scholar] [CrossRef] [Green Version]
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Figueiredo, E.; Silva, P. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Nossum, A.S. Exploring New Visualization Methods for Multi-Storey Indoor Environments and Dynamic Spatial Phenomena. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2013. [Google Scholar]
- Gotlib, D.; Gnat, M.; Marciniak, J. The research on cartographical indoor presentation and indoor route modeling for navigation applications. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–7. [Google Scholar]
- Reichenbacher, T. Mobile Cartography–Adaptive Visualisation of Geographic Information on Mobile Devices. Ph.D. Thesis, Technical University of Munich, Munich, Germany, 2004. [Google Scholar]
- Gunduz, M.; Isikdag, U.; Basaraner, M. A Review of Recent Research in Indoor Modelling & Mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 289–294. [Google Scholar] [CrossRef]
- Midtbø, T.; Nossum, A.; Haakonsen, T.; Nordan, R. Are indoor positioning systems mature for cartographic tasks? Evaluating the performance of a commercial indoor positioning system. In Proceedings of the AutoCarto 2012 Research Symposium, Columbus, OH, USA, 16–18 September 2012. [Google Scholar]
- Pang, Y.; Zhou, L.; Lin, B.; Lv, G.; Zhang, C. Generation of navigation networks for corridor spaces based on indoor visibility map. Int. J. Geogr. Inf. Sci. 2020, 34, 177–201. [Google Scholar] [CrossRef]
- Zlatanova, S.; Isikdag, U. 3D Indoor Models and Their Applications. In Encyclopedia of GIS, 2nd ed.; Shekhar, S., Xiong, H., Zhou, X., Eds.; Springer: Cham, Switzerland, 2015; pp. 1–12. [Google Scholar]
- Zlatanova, S.; Sithole, G.; Nakagawa, M.; Zhu, Q. Problems in Indoor Mapping and Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Gotlib, D.; Marciniak, J. Cartographical Aspects in the Design of Indoor Navigation Systems. Annu. Navig. 2012, 19, 35–48. [Google Scholar] [CrossRef]
- Zhou, Y.; Dao, T.H.D.; Thill, J.; Delmelle, E. Enhanced 3D visualization techniques in support of indoor location planning. Comput. Environ. Urban Syst. 2015, 50, 15–29. [Google Scholar] [CrossRef]
- Chen, J.; Clarke, K.C. Indoor cartography. Cartogr. Geogr. Inf. Sci. 2019, 46, 1–15. [Google Scholar] [CrossRef]
- Chen, J.; Clarke, K. Modeling Standards and File Formats for Indoor Mapping. In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management, Porto, Portugal, 27–28 April 2017; pp. 268–275. [Google Scholar]
- Zhu, J.; Wright, G.; Wang, J.; Wang, X. A Critical Review of the Integration of Geographic Information System and Building Information Modelling at the Data Level. ISPRS Int. J. Geo. Inf. 2018, 7, 66. [Google Scholar] [CrossRef] [Green Version]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Deng, Y.; Cheng, J.C.P.; Anumba, C. A framework for 3D traffic noise mapping using data from BIM and GIS integration. Struct. Infrastruct. Eng. 2016, 12, 1267–1280. [Google Scholar] [CrossRef]
- Nossum, A.S. IndoorTubes A Novel Design for Indoor Maps. Cartogr. Geogr. Inf. Sci. 2011, 38, 192–200. [Google Scholar] [CrossRef] [Green Version]
- Wrld3d/Wrld-Indoor-Maps-Api. Available online: https://github.com/wrld3d/wrld-indoor-maps-api (accessed on 12 October 2019).
- Gai, M.; Wang, G. Indoor3D: A WebGL based open source framework for 3D indoor maps visualization. In Proceedings of the 20th International Conference on 3D Web Technology, Heraklion, Crete, Greece, 18–21 June 2015; pp. 181–187. [Google Scholar]
- Indoor Mapping, Location Tracking & Wayfinding|ArcGIS Indoors. Available online: https://www.esri.com/en-us/arcgis/products/arcgis-indoors (accessed on 23 February 2020).
- LOD Spec. 2019. Available online: https://bimforum.org/wp-content/uploads/2019/04/LOD-Spec-2019-Part-I-and-Guide-2019-04-29.pdf (accessed on 25 November 2019).
- Liu, X.; Wang, X.; Wright, G.; Cheng, J.; Li, X.; Liu, R. A State-of-the-Art Review on the Integration of Building Information Modeling (BIM) and Geographic Information System (GIS). ISPRS Int. J. Geo. Inf. 2017, 6, 53. [Google Scholar] [CrossRef] [Green Version]
- Löwner, M.O.; Gröger, G.; Benner, J.; Biljecki, F.; Nagel, C. Proposal for a New LOD and Multi-Representation Concept for CityGML. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 4, 3–12. [Google Scholar] [CrossRef]
- Geiger, A.; Benner, J.; Haefele, K.H. Generalization of 3D IFC Building Models. In 3D Geoinformation Science: The Selected Papers of the 3D GeoInfo 2014, 1st ed.; Breunig, M., AlDoori, M., Butwilowski, E., Kuper, P.V., Benner, J., Haefele, K.H., Eds.; Springer: Berlin, Germany, 2015; pp. 19–35. [Google Scholar]
- Tang, L.; Li, L.; Ying, S.; Lei, Y. A Full Level-of-Detail Specification for 3D Building Models Combining Indoor and Outdoor Scenes. ISPRS Int. J. Geo. Inf. 2018, 7, 419. [Google Scholar] [CrossRef] [Green Version]
- Chen, J. Defining Semantic Levels of Detail for Indoor Maps. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Hagedorn, B.; Trapp, M.; Glander, T.; Dollner, J. Towards an Indoor Level-of-Detail Model for Route Visualization. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; pp. 692–697. [Google Scholar]
- Yang, W.; Ai, T. POI Information Enhancement Using Crowdsourcing Vehicle Trace Data and Social Media Data: A Case Study of Gas Station. ISPRS Int. J. Geo. Inf. 2018, 7, 178. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Ai, T.; Lu, W.; Cheng, X.; Zhou, Q. A Real-time Generalization and Multi-scale Visualization Method for POI Data in Volunteered Geographic Information. Acta Geod. Cartogr. Sin 2015, 44, 228–234. [Google Scholar]
- Yu, W.; Zhang, Y.; Chen, Z. Automated Generalization of Facility Points-of-Interest with Service Area Delimitation. IEEE Access 2019, 7, 63921–63935. [Google Scholar] [CrossRef]
- Nossum, A.S. Developing a Framework for Describing and Comparing Indoor Maps. Cartogr. J. 2013, 50, 218–224. [Google Scholar] [CrossRef]
- Ai, T.; Zhang, X.; Zhou, Q.; Yang, M. A vector field model to handle the displacement of multiple conflicts in building generalization. Int. J. Geogr. Inf. Sci. 2015, 29, 1310–1331. [Google Scholar] [CrossRef]
- Li, Z.; Yan, H.; Ai, T.; Chen, J. Automated building generalization based on urban morphology and Gestalt theory. Int. J. Geogr. Inf. Sci. 2004, 18, 513–534. [Google Scholar] [CrossRef]
- Sester, M. Optimization approaches for generalization and data abstraction. Int. J. Geogr. Inf. Sci. 2005, 19, 871–897. [Google Scholar] [CrossRef]
- Shen, Y.; Ai, T.; Wang, L.; Zhou, J. A new approach to simplifying polygonal and linear features using superpixel segmentation. Int. J. Geogr. Inf. Sci. 2018, 32, 2023–2054. [Google Scholar] [CrossRef]
- Ai, T.; Ke, S.; Yang, M.; Li, J. Envelope generation and simplification of polylines using Delaunay triangulation. Int. J. Geogr. Inf. Sci. 2017, 31, 297–319. [Google Scholar] [CrossRef]
- Gaode Open Platform, Web Services API and Related Downloads. Available online: http://lbs.amap.com/api/webservice/download/ (accessed on 20 April 2019).
- Lu, W.; Ai, T.; Zhang, X.; He, Y. An Interactive Web Mapping Visualization of Urban Air Quality Monitoring Data of China. Atmosphere 2017, 8, 148. [Google Scholar] [CrossRef] [Green Version]
- Pouke, M.; Virtanen, J.; Badri, M.; Ojala, T. Comparison of two workflows for Web-based 3D smart home visualizations. In Proceedings of the 2018 IEEE International Conference on Future IoT Technologies (Future IoT), Eger, Hungary, 18–19 January 2018; pp. 1–8. [Google Scholar]
- Lorenz, A.; Thierbach, C.; Baur, N.; Kolbe, T.H. Map design aspects, route complexity, or social background? Factors influencing user satisfaction with indoor navigation maps. Cartogr. Geogr. Inf. Sci. 2013, 40, 201–209. [Google Scholar] [CrossRef]
- Yu, C.; Ren, F.; Du, Q.; Zhao, Z.; Nie, K. Web map-based POI visualization for spatial decision support. Cartogr. Geogr. Inf. Sci. 2013, 40, 172–182. [Google Scholar] [CrossRef]
- Giudice, N.A.; Li, H. The Effects of Visual Granularity on Indoor Spatial Learning Assisted by Mobile 3D Information Displays. In Proceedings of the 2012 International Conference on Spatial Cognition, Kloster Seeon, Germany, 31 August–3 September 2012; pp. 163–172. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Selected Features |
|---|---|
| Building structure | Building outline, floor outlines, room outlines, room walls |
| Transportation | Escalators, elevators, entrances, exits, etc. |
| Commerce | Food, retail, entertainment, etc. |
| Public services | Toilets, rest areas, cashiers, service desks, ATMs, etc. |
| LOD | Represented Features |
|---|---|
| LOD0 | Building outline |
| LOD1 | Floor distribution and main function of each floor |
| LOD2 | Functional division of each floor |
| LOD3 | Detailed room distribution |
| Class Code | Class | Subclass Code | Subclass |
|---|---|---|---|
| 01 | Food | 0101 | Chinese food |
| 0102 | Western food | ||
| 0103 | Fast food | ||
| 0104 | Hot pot | ||
| 0105 | Barbecue | ||
| 0106 | Dessert and drinks | ||
| 0107 | Other cuisine | ||
| 02 | Shopping | 0201 | Womenswear |
| 0202 | Menswear | ||
| 0203 | Childrenswear | ||
| 0204 | Cosmetics | ||
| 0205 | Jewelry | ||
| 0206 | Retail | ||
| 0207 | Electronics | ||
| 03 | Life services | 0301 | Beauty services |
| 0302 | Fitness | ||
| 0303 | Health | ||
| 0304 | Education | ||
| 04 | Entertainment | 0401 | Cinema |
| 0402 | Internet cafe | ||
| 0403 | Game center | ||
| 0404 | Children’s playground |
| Semantic Level | LOD | Example |
|---|---|---|
| Class-level POI | LOD1 | Food |
| Subclass-level POI | LOD2 | Chinese food |
| POI attribute | LOD3 | Average price of this restaurant |
| Symbol Parameter | Range of Values | Self-Adaptive Conditions | Rules |
|---|---|---|---|
| Style |
|
|
|
| Size | Min size to max size |
|
|
| Color | Multiple sets of color schemes |
|
|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Ai, T.; Yang, M.; Zhang, X. A Multi-Scale Representation of Point-of-Interest (POI) Features in Indoor Map Visualization. ISPRS Int. J. Geo-Inf. 2020, 9, 239. https://doi.org/10.3390/ijgi9040239
Xiao Y, Ai T, Yang M, Zhang X. A Multi-Scale Representation of Point-of-Interest (POI) Features in Indoor Map Visualization. ISPRS International Journal of Geo-Information. 2020; 9(4):239. https://doi.org/10.3390/ijgi9040239
Chicago/Turabian StyleXiao, Yi, Tinghua Ai, Min Yang, and Xiang Zhang. 2020. "A Multi-Scale Representation of Point-of-Interest (POI) Features in Indoor Map Visualization" ISPRS International Journal of Geo-Information 9, no. 4: 239. https://doi.org/10.3390/ijgi9040239
APA StyleXiao, Y., Ai, T., Yang, M., & Zhang, X. (2020). A Multi-Scale Representation of Point-of-Interest (POI) Features in Indoor Map Visualization. ISPRS International Journal of Geo-Information, 9(4), 239. https://doi.org/10.3390/ijgi9040239