An Efficient Indoor Wi-Fi Positioning Method Using Virtual Location of AP


Abstract
:1. Introduction
2. Related Work
2.1. Fingerprint-Based Methods
- Machine learning methods. During the offline stage, a model is trained to associate signal vectors with spatial locations. During the online stage, the model is used to predict the location of a mobile target given the signal vector collected at the current location from surrounding APs. For instance, Wang et al. [10] proposed a deep-learning-based indoor fingerprinting system for indoor positioning called DeepFi, using a greedy learning algorithm to train the weights layer-by-layer to reduce complexity. Dai et al. [34] proposed an MLNN method, which integrates the RSSI transforming, the raw data denoising, and the unknown node locating into a deep architecture, moreover, avoiding using RSSI map in the online stage. To reduce the required computational cost and time, Extreme Learning Machine (ELM) is utilized in the work of Khatab et al. [35]. It also uses the autoencoder instead of random weight generation that leads to discriminative feature extraction and the improvement of localization performance. Among these methods, most of them use machine learning to find out the inner pattern behind MN data to match the RP data. However, outer constraints, such as landmarks, are still irreplaceable when facing the attenuation caused by obstacles.
- Machine learning-free methods. The representative method is WKNN [44]. It uses different similarity metrics to measure the distance between MNs and the selected RPs and then assigns a higher weight to the closer RP [40,45,46,47,49,50,51,52,53,54]. Feng et al. [45] reckon that the localization problem can be modeled as a sparse problem. Therefore, they use the theory of compressive sensing to recover sparse signals from a small number of noisy measurements. This can address the geographical dispersion of selected RPs caused by the inconsistency between signal space and physical space. He et al. [47] proposed partitioning the coverage area of each AP. Then, through convex optimization, the user is localized based on the cluster and the junction of the sectors it is within. Apart from these, room-level localization also gains much attention. For instance, Jiang et al. [49] used a zone-based clustering algorithm to identify an in-room occupancy hotspot. Then, a motion-based clustering algorithm is used to identify interzone correlation, thereby distinguishing different rooms.
2.2. Ranging-Based Methods
- Distance-based approaches. It calculates the distances between the location known infrastructures (e.g., AP) and the MN. Then, the geometric methods such as triangulation are used to estimate the exact locations of MNs. However, the frequently happened signal attenuation would cause the inaccuracy of location calculation. To address this issue, the method proposed by Dag et al. [23] used the least squares algorithm to improve the reliability of RSSI measurements. Similarly, the least squares algorithm is also used in the work of Coluccia et al. [27] to achieve a higher positioning accuracy. Apart from least squares approaches, many other methods have also been proposed to deal with the signal attenuation issue. For instance, Jung et al. [24] used particle filters to infer the possible location of the MN and the possible signal propagation path. Then, the inferred path is used to reduce the error caused by NLOS (Non-Line-of-Sight) distance. Chuang et al. [25] adopted the Particle Swarm Optimization (PSO) algorithm to improve the localization accuracy and the DV-distance approach to further boost the success ratios of localization. Chan et al. [26] proposed a geometric method to locate the MN, which requires only a few APs. Most of the distance-based approaches use the Log-Normal Shadowing Model to estimate the distance between APs and mobile targets. However, the attenuation is a vital parameter which is difficult to be obtained. In the aforementioned methods, this parameter is normally ignored, which reduces the accuracy of the ranging approach.
- Area-based methods. In these methods, people use a vague distance relationship, such as far from or close to the specific AP, calculated by RSSI to locate the rough area of the MN. Then, the centroid of the area is determined, which is regarded as the location estimation of the MN. However, the shape of the area varies. For instance, He et al. [32] used the change of RSSI from moving MNs to determine a triangle area constructed by APs. The MN is thus located in this triangle area. Sheu et al. [33] proposed an improved grid-scan algorithm to determine the estimated locations in a circle area. The circle area is constructed by the coverage of AP signals. Liu et al. [28] proposed using the RSSI differences received from distinct APs to construct a ring area where the mobile target is possibly located. Elbakly et al. [30] used the Voronoi diagram of APs to estimate the possible area of the MNs. The area-based approaches leverage the signal strength to determine a rough area, which is more robust than calculating physical distance with the signal strength. This can effectively reduce the impact of signal attenuation, but it can only provide area-level positioning accuracy, which can not meet the requirement of many Location Based Services (LBS) applications.
2.3. Virtual AP-Based Methods
3. Signal Strength Ratio-Based Location Solver
3.1. Signal Strength Ratio
3.2. Apollonius Circle
3.3. Virtual AP
4. Proposed Method
4.1. Data Preprocessing
4.2. Region Division
4.3. Virtual AP Estimation
4.4. Mobile Node Location Estimation
5. Evaluation
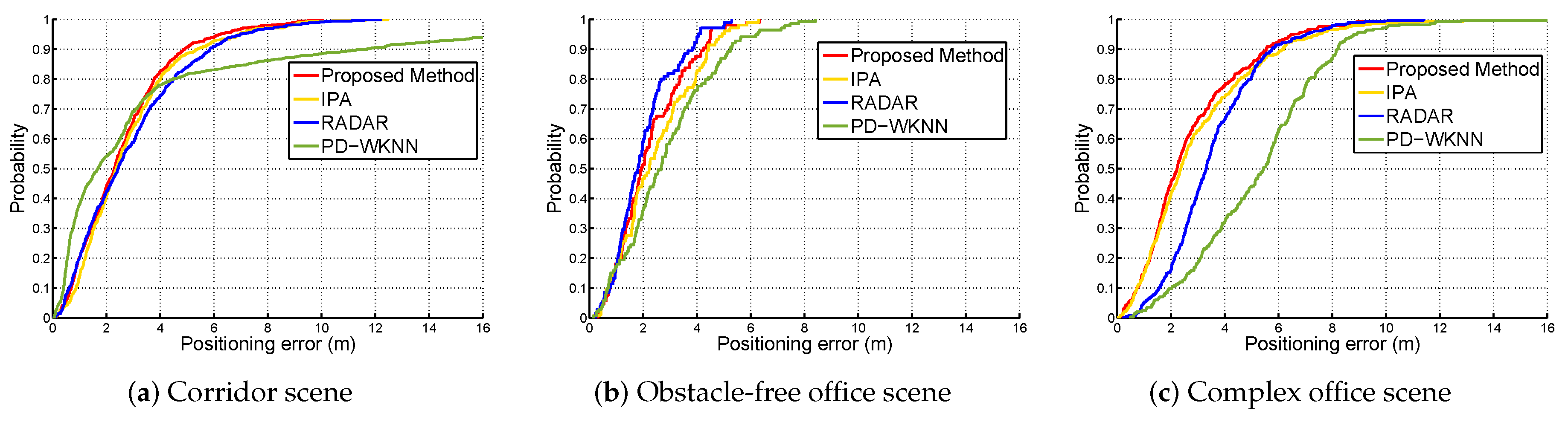
5.1. Impact of Test Scenes on Positioning Accuracy
5.2. Impact of Environmental Parameter on Positioning Accuracy
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, R.; Chen, L. Indoor Positioning with Smartphones: The State-of-the-art and the Challenges. Acta Geod. Cartogr. Sin. 2017, 46, 1316–1326. [Google Scholar]
- Shang, J.; Hu, X.; Cheng, W.; Fan, H. GridiLoc: A backtracking grid filter for fusing the grid model with PDR using smartphone sensors. Sensors 2016, 16, 2137. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wang, J.; Liu, C. A Bluetooth/PDR integration algorithm for an indoor positioning system. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef] [Green Version]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the 2013 15th International Conference on Advanced Communications Technology (ICACT), Phoenix Park, PyeongChang, Korea, 27–30 Jannuary 2013; pp. 1146–1150. [Google Scholar]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Luo, J.; Fan, L.; Li, H. Indoor positioning systems based on visible light communication: State of the art. IEEE Commun. Surv. Tutor. 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Wu, T.; Liu, J.; Li, Z.; Liu, K.; Xu, B. Accurate smartphone indoor visual positioning based on a high-precision 3D photorealistic map. Sensors 2018, 18, 1974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chapre, Y.; Ignjatovic, A.; Seneviratne, A.; Jha, S. Csi-mimo: Indoor wi-fi fingerprinting system. In Proceedings of the 39th Annual IEEE Conference on Local Computer Networks, Edmonton, AB, Canada, 8–11 September 2014; pp. 202–209. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Gallagher, T.; Dempster, A.G.; Rizos, C. How feasible is the use of magnetic field alone for indoor positioning? In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Kim, H.S.; Seo, W.; Baek, K.R. Indoor positioning system using magnetic field map navigation and an encoder system. Sensors 2017, 17, 651. [Google Scholar] [CrossRef]
- Schmidt, E.; Inupakutika, D.; Mundlamuri, R.; Akopian, D. SDR-Fi: Deep-Learning-Based Indoor Positioning via Software-Defined Radio. IEEE Access 2019, 7, 145784–145797. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian fusion for indoor positioning using bluetooth fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Chen, L.; Kuusniemi, H.; Chen, Y.; Liu, J.; Pei, L.; Ruotsalainen, L.; Chen, R. Constraint Kalman filter for indoor bluetooth localization. In Proceedings of the 2015 23rd European Signal Processing Conference (EUSIPCO), Nice, France, 31 August–4 September 2015; pp. 1915–1919. [Google Scholar]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 26–29 June 2012; pp. 197–210. [Google Scholar]
- Shen, G.; Chen, Z.; Zhang, P.; Moscibroda, T.; Zhang, Y. Walkie-Markie: Indoor pathway mapping made easy. In Proceedings of the 10th {USENIX} Symposium on Networked Systems Design and Implementation ({NSDI} 13), Lombard, IL, USA, 2–5 April 2013; pp. 85–98. [Google Scholar]
- Kim, Y.; Shin, H.; Cha, H. Smartphone-based Wi-Fi pedestrian-tracking system tolerating the RSS variance problem. In Proceedings of the 2012 IEEE International Conference on Pervasive Computing and Communications, Lugano, Switzerland, 19–23 March 2012; pp. 11–19. [Google Scholar]
- Palumbo, F.; Barsocchi, P.; Chessa, S.; Augusto, J.C. A stigmergic approach to indoor localization using bluetooth low energy beacons. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015; pp. 1–6. [Google Scholar]
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against WiFi? In A comparison of indoor location performance. In Proceedings of the European Wireless 2014, 20th European Wireless Conference, Castelldefels, Spain, 14–16 May 2014; pp. 1–6. [Google Scholar]
- Rusli, M.E.; Ali, M.; Jamil, N.; Din, M.M. An improved indoor positioning algorithm based on rssi-trilateration technique for internet of things (iot). In Proceedings of the 2016 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 25–27 July 2016; pp. 72–77. [Google Scholar]
- Dag, T.; Arsan, T. Received signal strength based least squares lateration algorithm for indoor localization. Comput. Electr. Eng. 2018, 66, 114–126. [Google Scholar] [CrossRef]
- Jung, J.; Myung, H. Range-based indoor user localization using reflected signal path model. In Proceedings of the 5th IEEE International Conference on Digital Ecosystems and Technologies (IEEE DEST 2011), Daejeon, Korea, 31 May–3 June 2011; pp. 251–256. [Google Scholar]
- Chuang, P.J.; Wu, C.P. Employing PSO to enhance RSS range-based node localization for wireless sensor networks. J. Inf. Sci. Eng. 2011, 27, 1597–1611. [Google Scholar]
- Chan, F.K.; So, H.C. Accurate distributed range-based positioning algorithm for wireless sensor networks. IEEE Trans. Signal Process. 2009, 57, 4100–4105. [Google Scholar] [CrossRef] [Green Version]
- Coluccia, A.; Ricciato, F. RSS-based localization via Bayesian ranging and iterative least squares positioning. IEEE Commun. Lett. 2014, 18, 873–876. [Google Scholar] [CrossRef]
- Liu, C.; Scott, T.; Wu, K.; Hoffman, D. Range-free sensor localisation with ring overlapping based on comparison of received signal strength indicator. IJSNet 2007, 2, 399–413. [Google Scholar] [CrossRef]
- Rajagopal, N.; Chayapathy, S.; Sinopoli, B.; Rowe, A. Beacon placement for range-based indoor localization. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2016; pp. 1–8. [Google Scholar]
- Elbakly, R.; Youssef, M. A robust zero-calibration RF-based localization system for realistic environments. In Proceedings of the 2016 13th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), London, UK, 27–30 June 2016; pp. 1–9. [Google Scholar]
- Lasla, N.; Younis, M.F.; Ouadjaout, A.; Badache, N. An effective area-based localization algorithm for wireless networks. IEEE Trans. Comput. 2014, 64, 2103–2118. [Google Scholar] [CrossRef]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- Sheu, J.P.; Chen, P.C.; Hsu, C.S. A distributed localization scheme for wireless sensor networks with improved grid-scan and vector-based refinement. IEEE Trans. Mob. Comput. 2008, 7, 1110–1123. [Google Scholar] [CrossRef]
- Dai, H.; Ying, W.H.; Xu, J. Multi-layer neural network for received signal strength-based indoor localisation. IET Commun. 2016, 10, 717–723. [Google Scholar] [CrossRef]
- Khatab, Z.E.; Hajihoseini, A.; Ghorashi, S.A. A fingerprint method for indoor localization using autoencoder based deep extreme learning machine. IEEE Sens. Lett. 2017, 2, 1–4. [Google Scholar] [CrossRef]
- Li, Z.; Xu, K.; Wang, H.; Zhao, Y.; Wang, X.; Shen, M. Machine-Learning-Based Positioning: A Survey and Future Directions. IEEE Netw. 2019, 33, 96–101. [Google Scholar] [CrossRef]
- Salamah, A.H.; Tamazin, M.; Sharkas, M.A.; Khedr, M. An enhanced WiFi indoor localization system based on machine learning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Nerguizian, C.; Nerguizian, V. Indoor fingerprinting geolocation using wavelet-based features extracted from the channel impulse response in conjunction with an artificial neural network. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 2028–2032. [Google Scholar]
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement schemes for indoor mobile location estimation: A survey. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Xue, W.; Yu, K.; Hua, X.; Li, Q.; Qiu, W.; Zhou, B. APs’s virtual positions-based reference point clustering and physical distance-based weighting for indoor Wi-Fi positioning. IEEE Internet Things J. 2018, 5, 3031–3042. [Google Scholar] [CrossRef]
- Mo, Y.; Cai, Y.; Wang, B. A novel indoor localization method based on virtual AP estimation. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 5508–5512. [Google Scholar]
- Liu, H.H.; Yang, Y.N. WiFi-based indoor positioning for multi-floor environment. In Proceedings of the TENCON 2011-2011 IEEE Region 10 Conference, Bali, Indonesia, 21–24 November 2011; pp. 597–601. [Google Scholar]
- Coolidge, J.L. A Treatise on the Circle and the Sphere; Clarendon Press: Oxford, UK, 1916. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surv. Tutor. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2011, 11, 1983–1993. [Google Scholar] [CrossRef]
- Au, A.W.S.; Feng, C.; Valaee, S.; Reyes, S.; Sorour, S.; Markowitz, S.N.; Gold, D.; Gordon, K.; Eizenman, M. Indoor tracking and navigation using received signal strength and compressive sensing on a mobile device. IEEE Trans. Mob. Comput. 2012, 12, 2050–2062. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Tilejunction: Mitigating signal noise for fingerprint-based indoor localization. IEEE Trans. Mob. Comput. 2015, 15, 1554–1568. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G. Sectjunction: Wi-Fi indoor localization based on junction of signal sectors. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 2605–2610. [Google Scholar]
- Jiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Hannigan, M.; Shang, L. Ariel: Automatic wi-fi based room fingerprinting for indoor localization. In Proceedings of the 2012 ACM conference on ubiquitous computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 441–450. [Google Scholar]
- Shin, B.; Lee, J.H.; Lee, T.; Kim, H.S. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 2012 8th International Conference on Computing Technology and Information Management (NCM and ICNIT), Seoul, Korea, 24–26 April 2012; Volume 2, pp. 574–577. [Google Scholar]
- Yang, Z.; Wu, C.; Liu, Y. Locating in fingerprint space: wireless indoor localization with little human intervention. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 269–280. [Google Scholar]
- Liu, S.; Hua, X.; Qiu, W.; Zhang, W.; He, X. An improved WiFi fingerprint positioning algorithm. J. Geomat. 2017, 42, 46–49. [Google Scholar]
- Niu, J.; Wang, B.; Shu, L.; Duong, T.Q.; Chen, Y. ZIL: An energy-efficient indoor localization system using ZigBee radio to detect WiFi fingerprints. IEEE J. Sel. Areas Commun. 2015, 33, 1431–1442. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Shang, J.; Gu, F.; Han, Q. Improving Wi-Fi indoor positioning via AP sets similarity and semi-supervised affinity propagation clustering. Int. J. Distrib. Sens. Netw. 2015, 11, 109642. [Google Scholar] [CrossRef]
- Labinghisa, B.; Park, G.S.; Lee, D.M. Improved indoor localization system based on virtual access points in a Wi-Fi environment by filtering schemes. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Lee, D.M.; Labinghisa, B. Indoor localization system based on virtual access points with filtering schemes. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719866135. [Google Scholar] [CrossRef] [Green Version]
- Xue, W.; Qiu, W.; Hua, X.; Yu, K. Improved Wi-Fi RSSI measurement for indoor localization. IEEE Sensors J. 2017, 17, 2224–2230. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000 Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No. 00CH37064), el Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Chen, J.; Wang, S.; Ouyang, M.; Xuan, Y.; Li, K.C. Iterative Positioning Algorithm for Indoor Node Based on Distance Correction in WSNs. Sensors 2019, 19, 4871. [Google Scholar] [CrossRef] [PubMed] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Method | IPA | RADAR | PD-WKNN | |
|---|---|---|---|---|
| Corridor scene | 2.60 m | 2.80 m | 2.89 m | 3.62 m |
| Obstacle-free office scene | 2.24 m | 2.45 m | 1.99 m | 2.86 m |
| Complex office scene | 2.75 m | 3.00 m | 3.56 m | 5.28 m |
| Total | 2.62 m | 2.84 m | 3.04 m | 4.12 m |
| Mean Error (m) | Median Error (m) | 70% Error (m) | |
|---|---|---|---|
| 2.59 | 2.27 | 3.21 | |
| 2.60 | 2.27 | 3.19 | |
| 2.60 | 2.29 | 3.22 | |
| 2.61 | 2.30 | 3.25 | |
| 2.61 | 2.30 | 3.25 |
| Mean Error (m) | Median Error (m) | 70% Error (m) | |
|---|---|---|---|
| 2.22 | 1.98 | 2.77 | |
| 2.21 | 1.95 | 2.79 | |
| 2.24 | 1.95 | 2.82 | |
| 2.25 | 1.96 | 2.87 | |
| 2.28 | 1.93 | 2.80 |
| Mean Error (m) | Median Error (m) | 70% Error (m) | |
|---|---|---|---|
| 2.71 | 2.13 | 3.26 | |
| 2.72 | 2.15 | 3.28 | |
| 2.75 | 2.23 | 3.29 | |
| 2.76 | 2.25 | 3.28 | |
| 2.78 | 2.27 | 3.27 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Hu, X.; Luo, S.; Shang, J. An Efficient Indoor Wi-Fi Positioning Method Using Virtual Location of AP. ISPRS Int. J. Geo-Inf. 2020, 9, 261. https://doi.org/10.3390/ijgi9040261
Xu F, Hu X, Luo S, Shang J. An Efficient Indoor Wi-Fi Positioning Method Using Virtual Location of AP. ISPRS International Journal of Geo-Information. 2020; 9(4):261. https://doi.org/10.3390/ijgi9040261
Chicago/Turabian StyleXu, Fan, Xuke Hu, Shuaiwei Luo, and Jianga Shang. 2020. "An Efficient Indoor Wi-Fi Positioning Method Using Virtual Location of AP" ISPRS International Journal of Geo-Information 9, no. 4: 261. https://doi.org/10.3390/ijgi9040261
APA StyleXu, F., Hu, X., Luo, S., & Shang, J. (2020). An Efficient Indoor Wi-Fi Positioning Method Using Virtual Location of AP. ISPRS International Journal of Geo-Information, 9(4), 261. https://doi.org/10.3390/ijgi9040261