Graphic Simplification and Intelligent Adjustment Methods of Road Networks for Navigation with Reduced Precision

 ,
,  ,
,
Abstract
:1. Introduction
2. Constraints of Road Generalization for Navigation
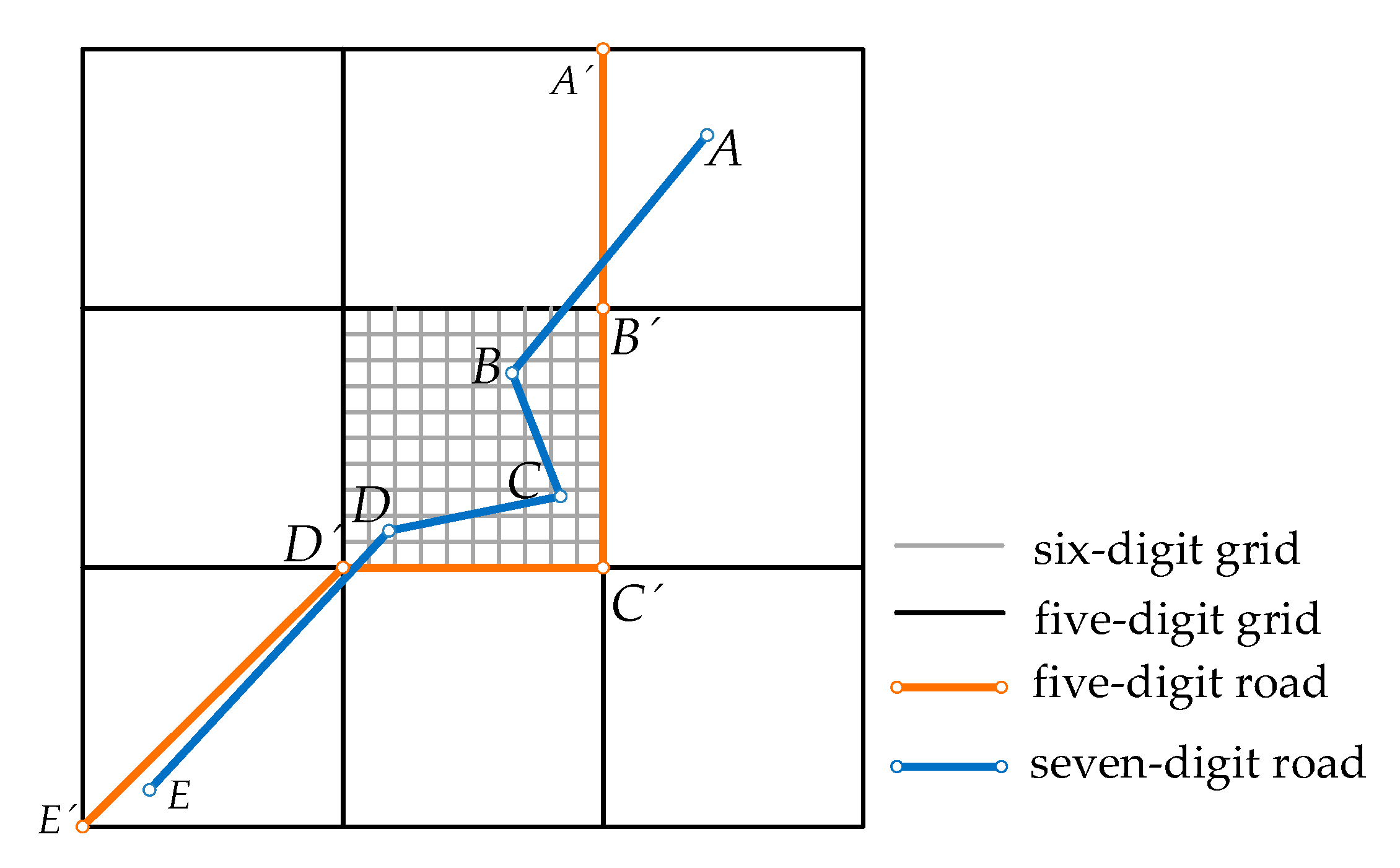
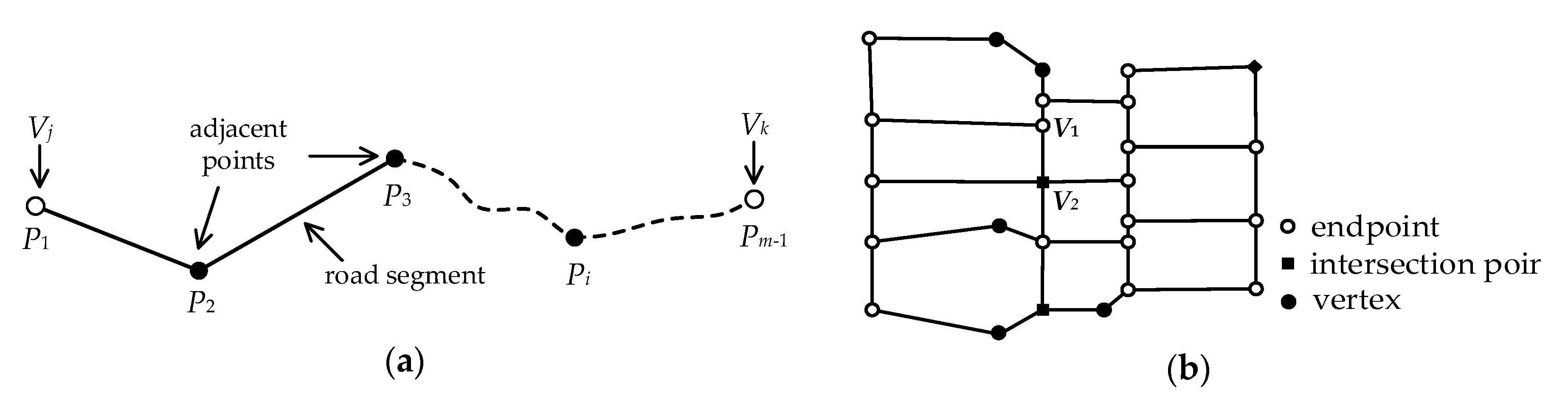
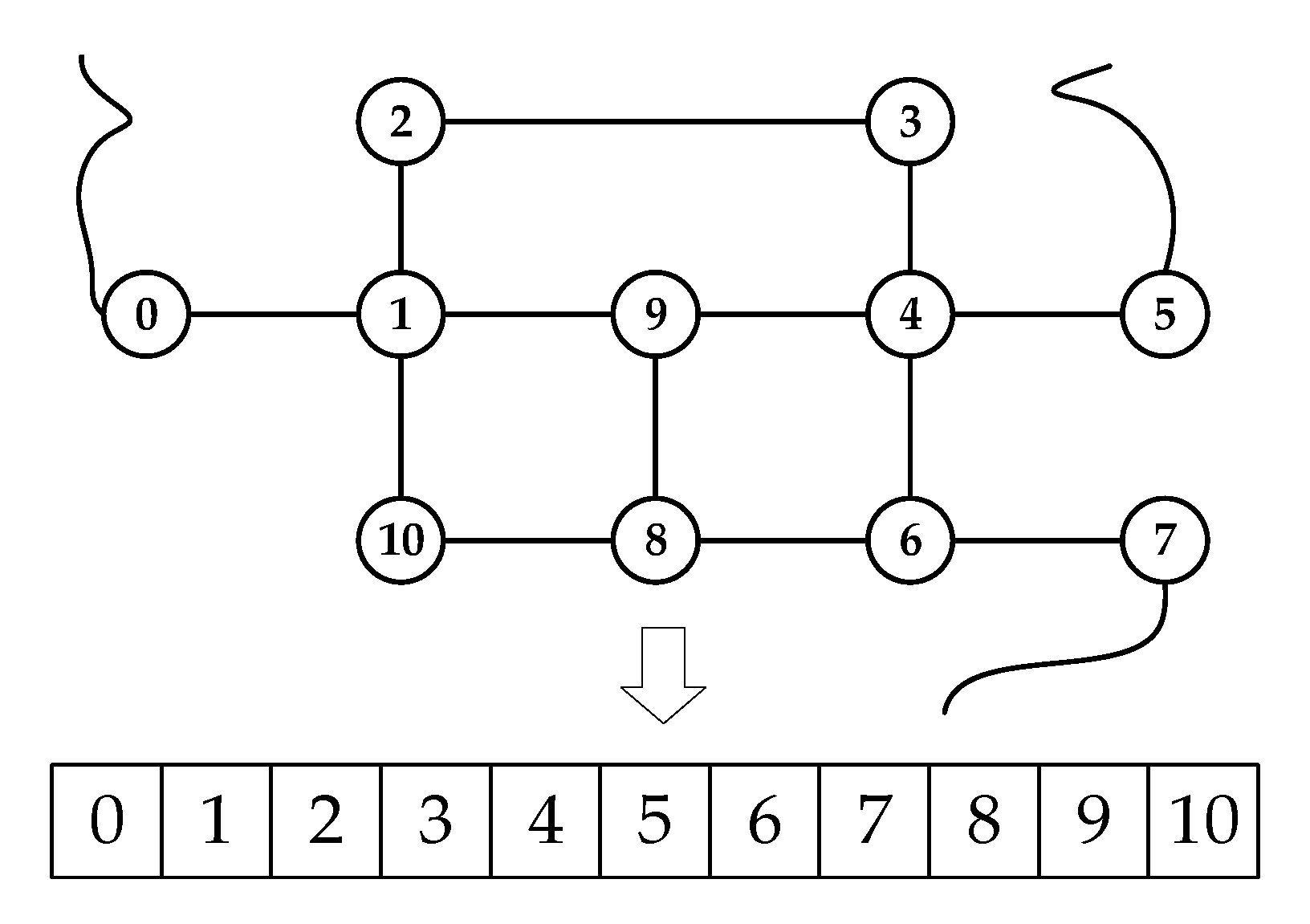
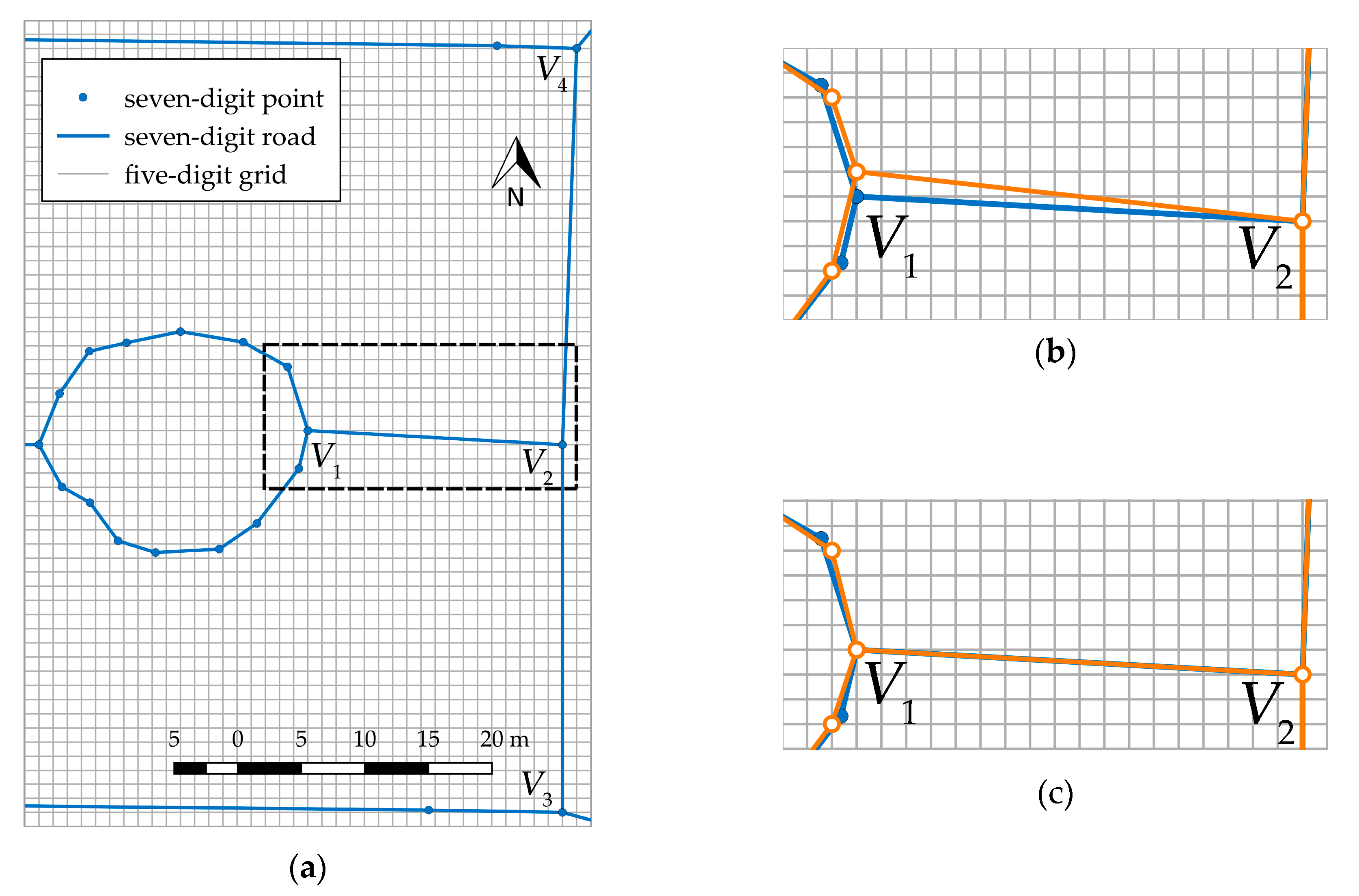
2.1. Data Model of Roads
2.2. Constraints on Road Generalization
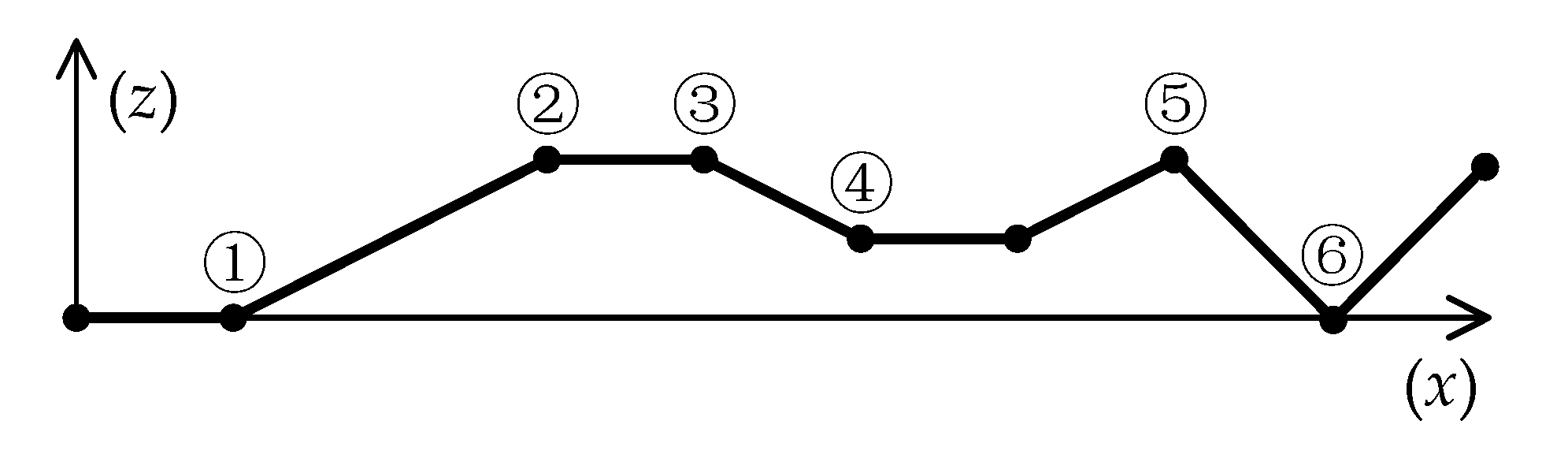
3. Extraction of Topographical Features on a Road Section
3.1. Extraction of 3D Terrain Feature
3.2. Extraction of a Long, Straight and Flat Road
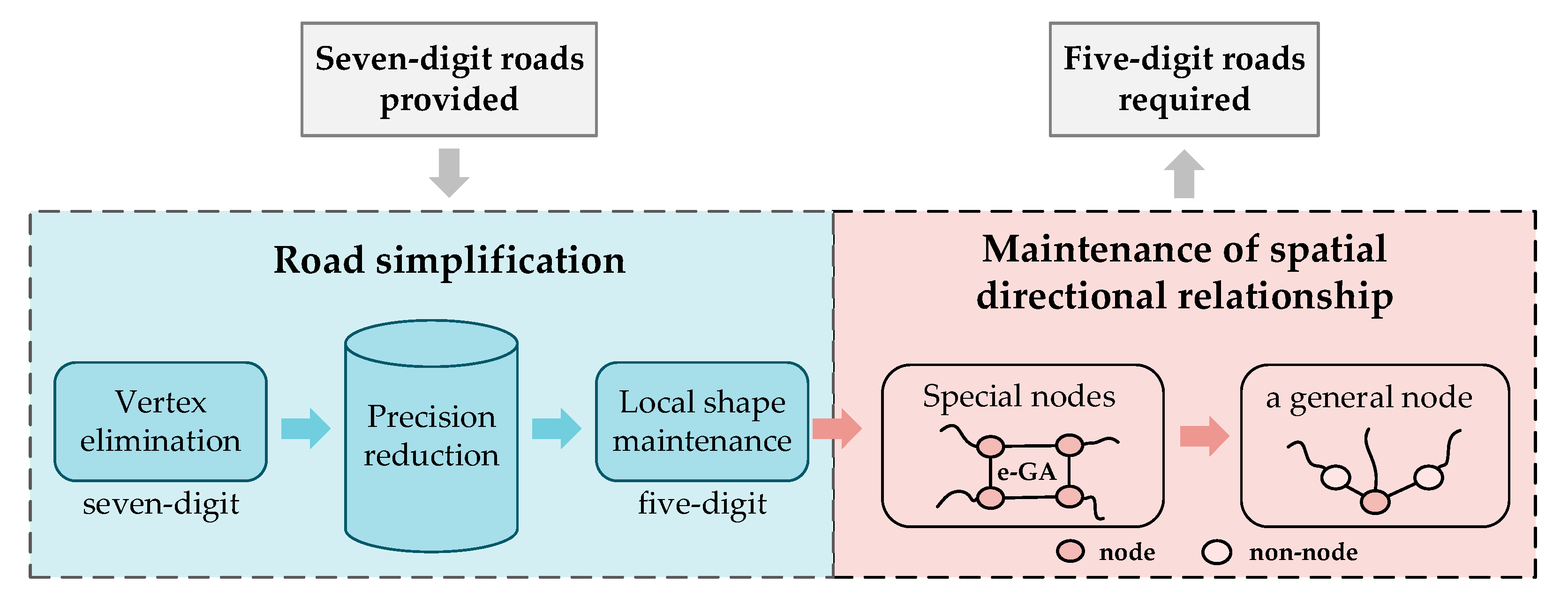
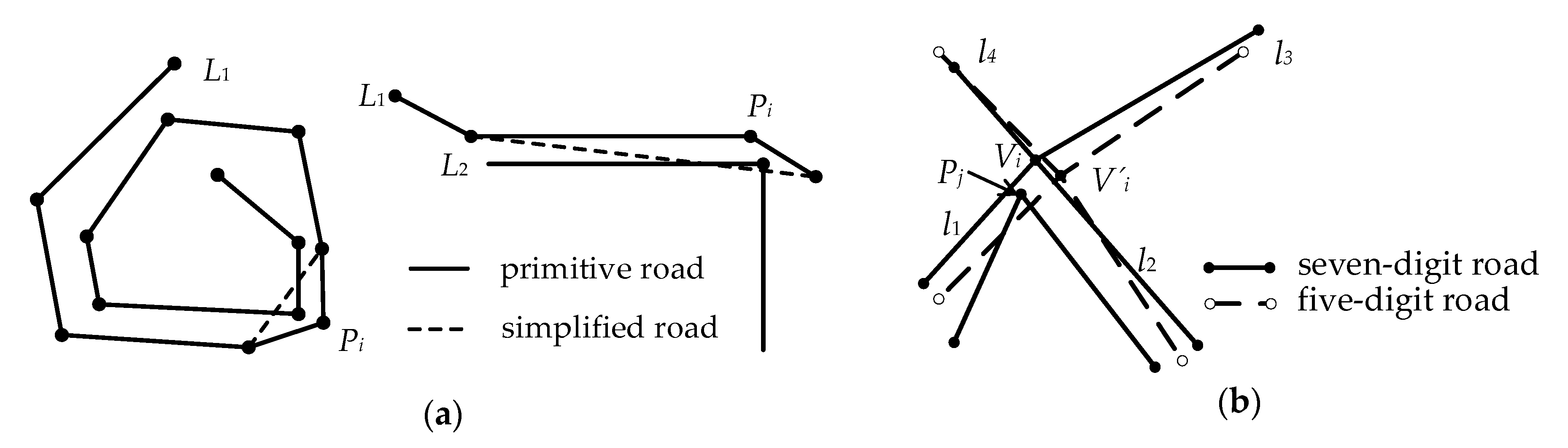
4. Road Simplification
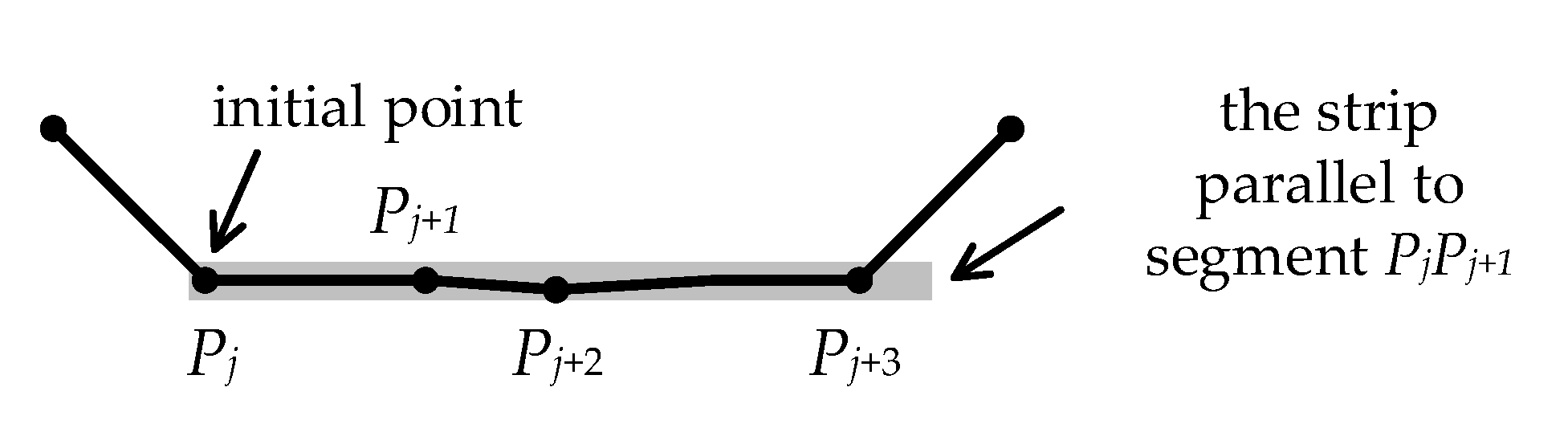
4.1. Opheim Algorithm
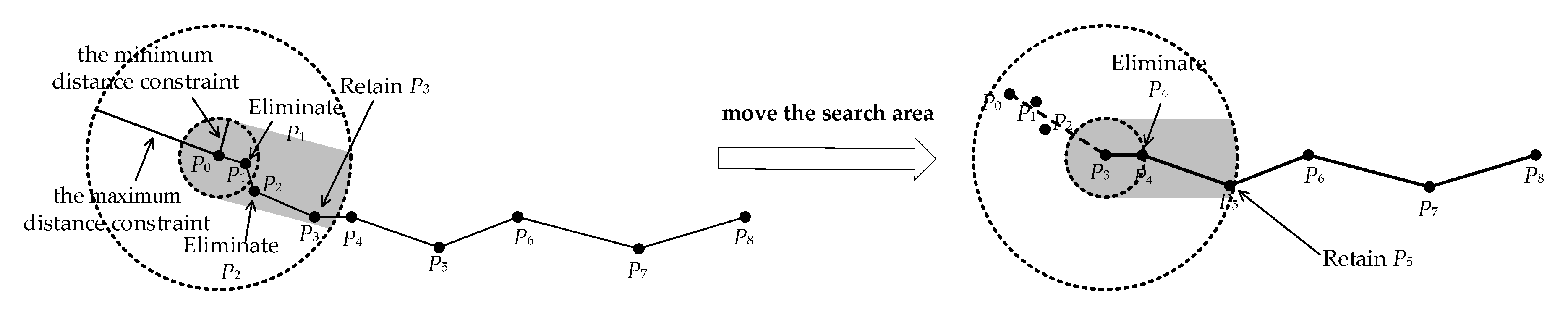
4.2. Improved Opheim Algorithm
| Algorithm 1: Vertex elimination marker (R, i) |
| Input: A road R with m vertices (P0, …, Pi, …, Pm − 1) and a minimum distance tolerance ε |
| Output: point Pi with attribution value Remove /* Removei */ |
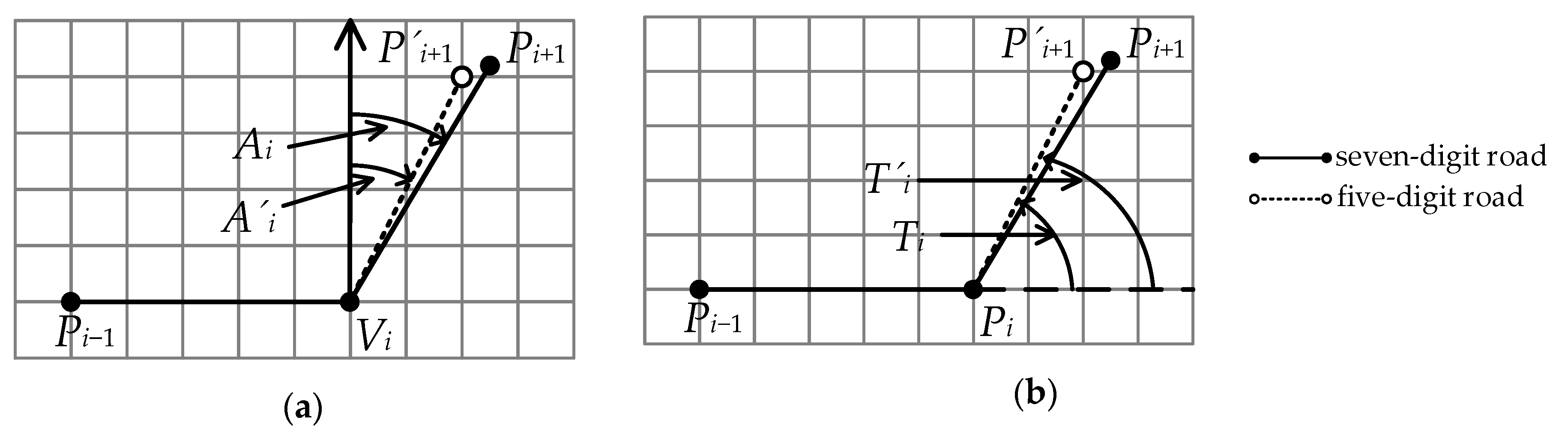
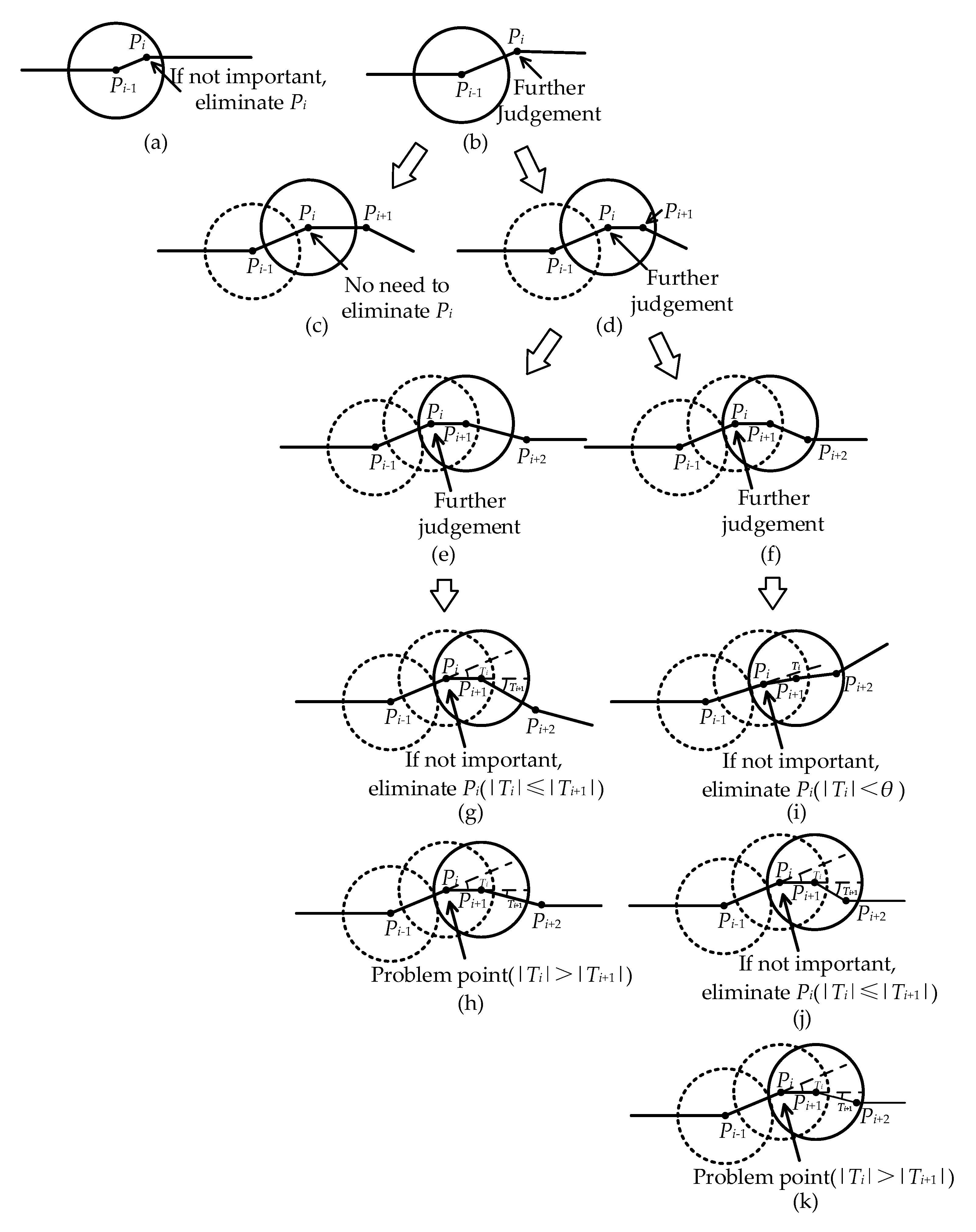
| 1. if Di,1 < ε (Figure 11a) |
| 2. then if Ranki = 0 |
| 3. then call TopologicalConflict (Ranki) |
| 4. if Ranki = 2 |
| 5. then Removei ← 2 |
| 6. else Removei ← 1 |
| 7. else (Figure 11b) |
| 8. if Di,2 ≥ ε (Figure 11c) |
| 9. then Removei ← 0 |
| 10. else (Figure 11d) |
| 11. if Di + 1,2 ≥ ε (Figure 11e) |
| 12. then if |Ti| <= |Ti + 1| (Figure 11g) |
| 13. then call TopologicalConflict (Ranki) |
| 14. if Ranki = 2 |
| 15. then Removei ← 2 |
| 16. else Removei ← 1 |
| 17. else (Figure 11f) |
| 18. if |Ti| < θ or |Ti| <= |Ti + 1| (Figure 11i,j) |
| 19. then call TopologicalConflict (Ranki) |
| 20. if Ranki = 2 |
| 21. then Removei ← 2 |
| 22. else Removei ← 1 |
| 23. end if |
| 24. return Removei |
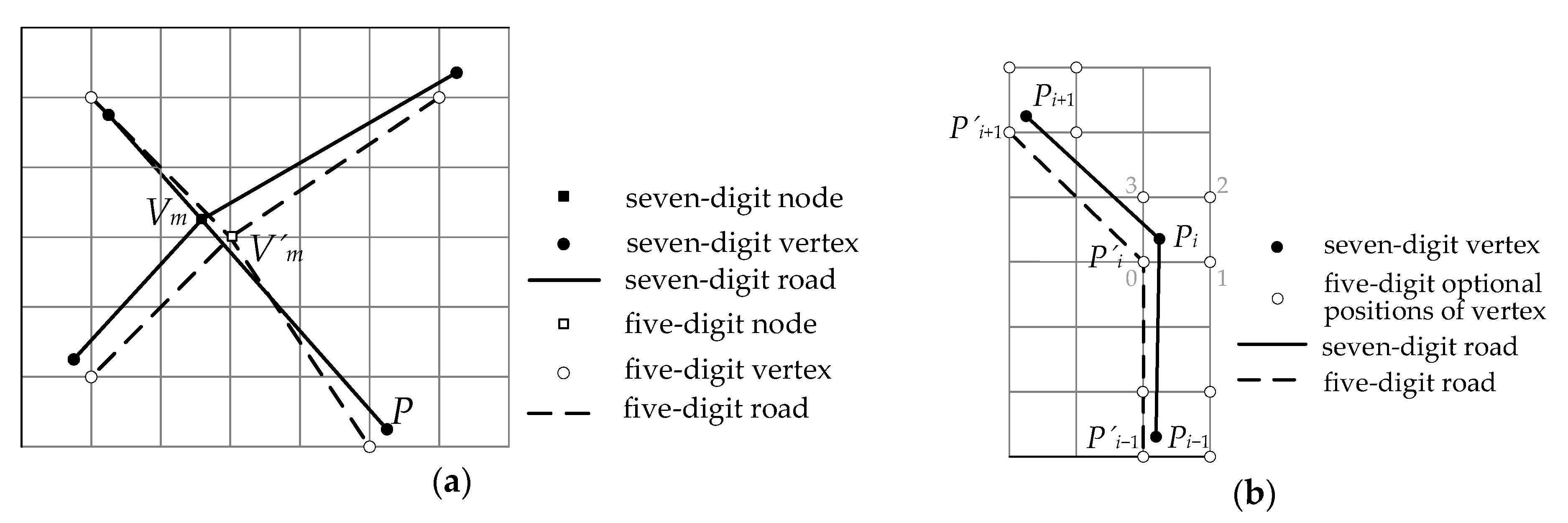
4.3. Local Shape Maintenance While Reducing Precision
5. Maintenance of Spatial Directional Relationship at Nodes
5.1. Adjustment of Spatial Directional Relationship at a General Node
5.2. Adjustment of Spatial Directional Relationship at Special Nodes
5.2.1. Difference between Two Types of Adjustments
5.2.2. Elite Strategy Genetic Algorithm for Spatial Direction Adjustment
6. Experimental Results and Analysis
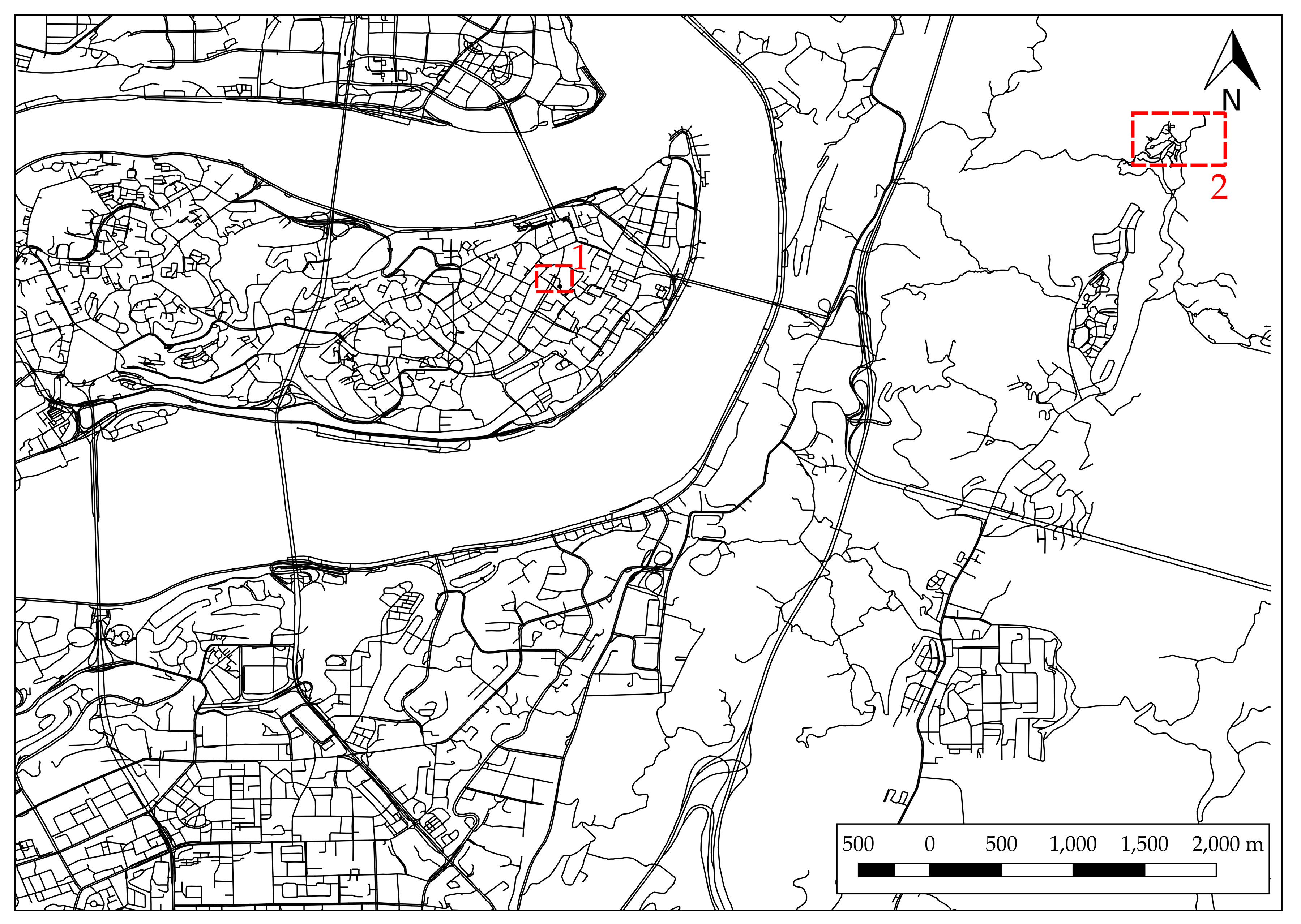
6.1. Experiments Design and Study Area
6.2. Result Analysis
7. Conclusions
- (1)
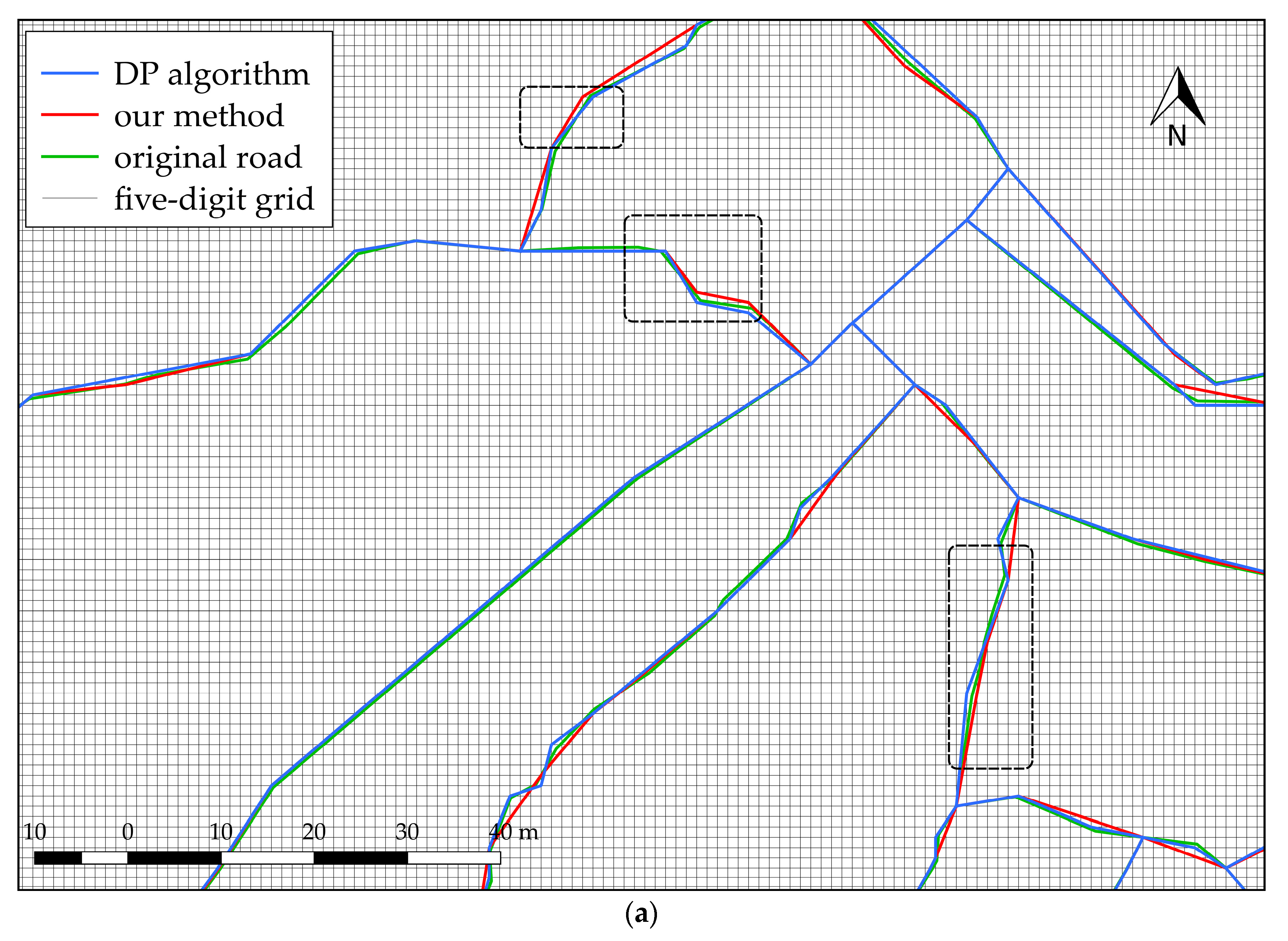
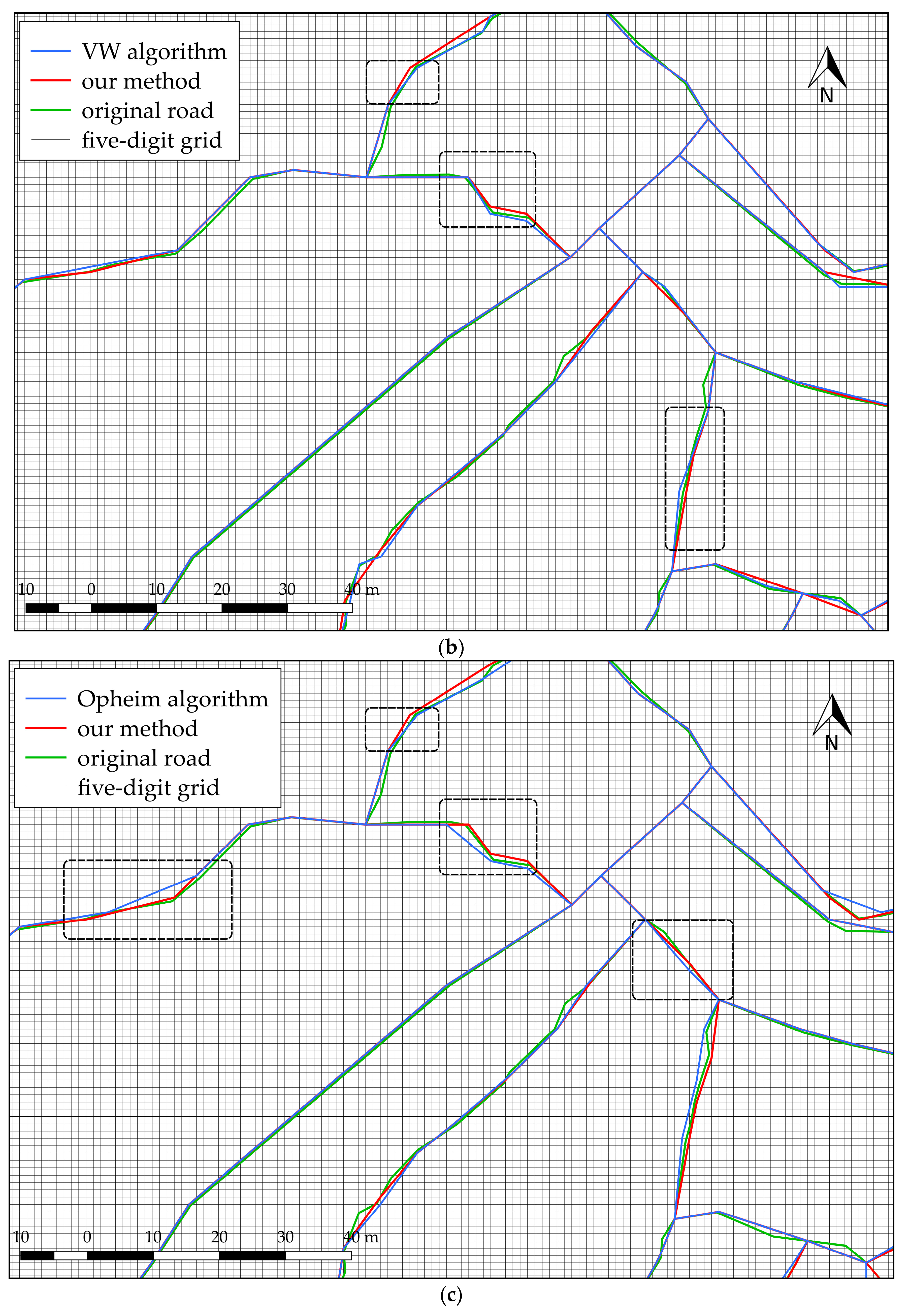
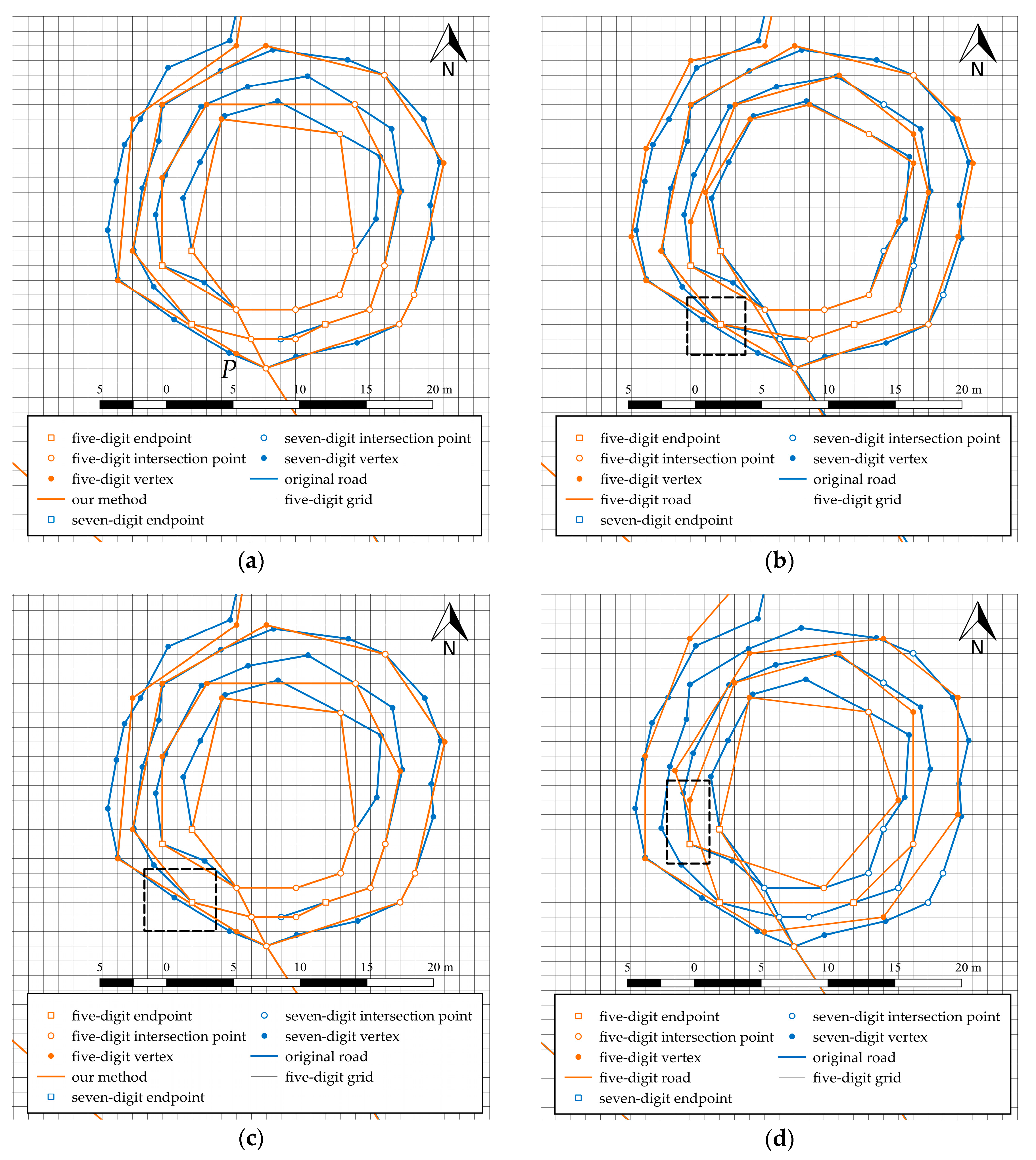
- Compared with the DP, VW, and Opheim algorithms, the improved Opheim algorithm that considers requirements in navigation retains the characteristic points needed for navigation and is combined with the intelligent maintenance of the spatial directional relationship. The local shape of the roads is similar to the original roads after road data precision is reduced. In the Hausdorff distance statistics between the road networks with five-digit precision and the original road networks, the result of our method was close to the Opheim algorithm, and the difference was smaller than those of the other three methods. The average change of turning angles with local shape adjustment was optimized compared to the average change in turning angles without local shape adjustment. A part of the visual effects of the results was shown in Figure 16.
- (2)
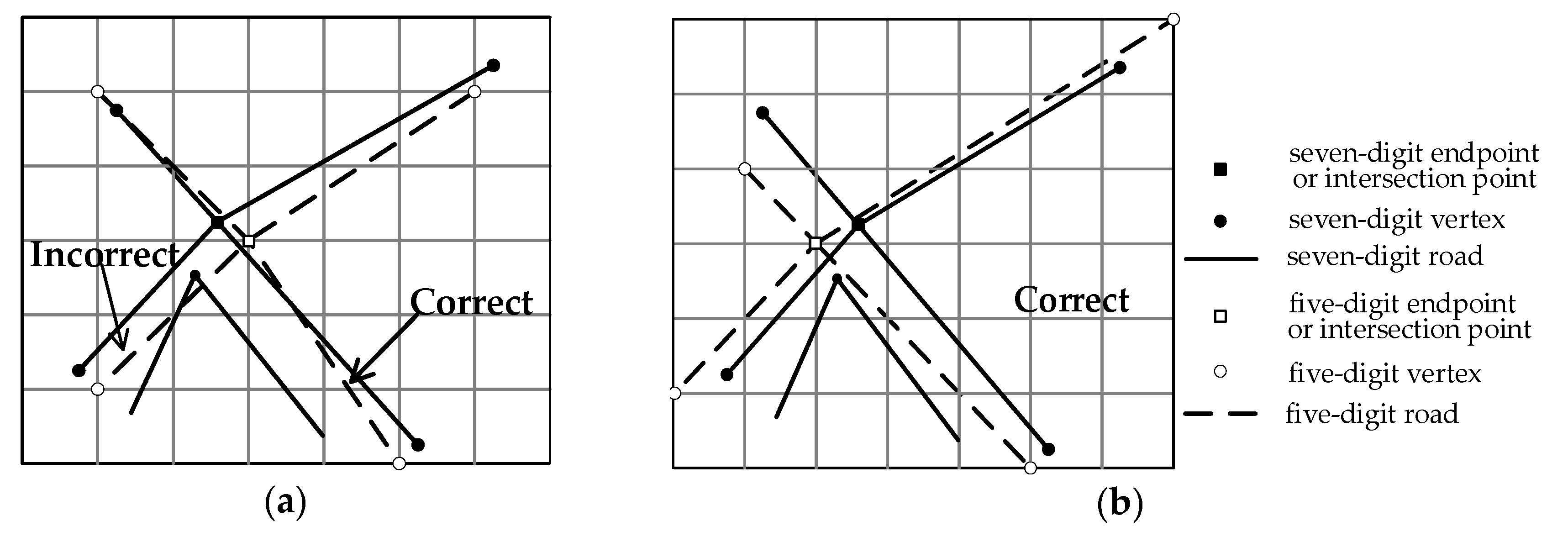
- Our algorithm considers the spatial topological relationships among all features. Theoretically, in the process of maintaining the local shape of the road, when topological errors occur in all optional positions of a vertex, topological errors will be marked in the result. During the process of adjusting the spatial relationship among the roads connecting with the node, if all the schemes satisfying the user-defined constraint on spatial directional deviation cause spatial topological errors, the optimal scheme selected from them will also cause spatial topological errors.
- (3)
- The spatial directional relationships between roads at all nodes in road networks are maintained when data precision is lowered. The spatial directional relationship among road segments connected at every general node is adjusted optimally and total changes in azimuths of road segments connected at special nodes are minimized by obtaining the near-optimal solution.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, Z. Algorithmic Foundation of Multi-Scale Spatial Representation; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. 1973, 10, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Opheim, H. Smoothing a digitized curve by data reduction methods. In Proceedings of the Eurographics, Munich, Germany, 9–11 September 1981; pp. 127–135. [Google Scholar]
- Opheim, H. Fast data reduction of a digitized curve. Geo-Process. 1982, 2, 33–40. [Google Scholar]
- Visvalingam, M.; Whyatt, J.D. Line generalisation by repeated elimination of points. Cartogr. J. 1993, 30, 46–51. [Google Scholar] [CrossRef]
- Saalfeld, A. Topologically consistent line simplification with the Douglas-Peucker algorithm. Comput. Geosci. Inf. Sci. 1999, 26, 7–18. [Google Scholar] [CrossRef]
- Pallero, J. Robust line simplification on the plane. Comput. Geosci. 2013, 61, 152–159. [Google Scholar] [CrossRef]
- Tienaah, T.; Stefanakis, E.; Coleman, D.J.G. Contextual Douglas-Peucker simplification. Geomatica 2015, 69, 327–338. [Google Scholar] [CrossRef]
- Qingsheng, G.; Brandenberger, C.; Hurni, L. A progressive line simplification algorithm. Geo-Spat. Inf. Sci. 2002, 5, 41–45. [Google Scholar] [CrossRef] [Green Version]
- Park, W.; Yu, K. Hybrid line simplification for cartographic generalization. Pattern Recognit. Lett. 2011, 32, 1267–1273. [Google Scholar] [CrossRef]
- Keates, J.S. Cartographic Design and Production; Longman Inc.: New York, NY, USA, 1973. [Google Scholar]
- Jones, C.B.; Ware, M. Nearest neighbor search for linear and polygonal objects with constrained trianglations. In Proceedings of the 8th International Symposium on Spatial Data Handling, Vancouver, BC, Canada, 11–15 July 1998; pp. 13–21. [Google Scholar]
- Ai, T.; Guo, R.; Liu, Y. A Binary Tree Represen tation of Curve H ierarch ical Structure in Depth. Acta Geod. Cartogr. Sin. 2001, 30, 343–348. [Google Scholar]
- Ai, T.; Liu, Y.; Chen, J. The hierarchical watershed partitioning and data simplification of river network. In Progress in Spatial Data Handling; Springer: Berlin/Heidelberg, Germany, 2006; pp. 617–632. [Google Scholar]
- Ai, T. The drainage network extraction from contour lines for contour line generalization. ISPRS J. Photogramm. Remote Sens. 2007, 62, 93–103. [Google Scholar] [CrossRef]
- Ai, T.; Zhou, Q.; Zhang, X.; Huang, Y.; Zhou, M. A Simplification of Ria Coastline with Geomorphologic Characteristics Preserved. Mar. Geod. 2014, 37, 167–186. [Google Scholar] [CrossRef]
- Ai, T.; Ke, S.; Yang, M.; Li, J. Envelope generation and simplification of polylines using Delaunay triangulation. Int. J. Geogr. Inf. Sci. 2016, 31, 297–319. [Google Scholar] [CrossRef]
- Perkal, J. An attempt at objective generalization. Mich. Inter.-Univ. Community Math. Geogr. Discuss. Pap. 1966, 10, 130–142. [Google Scholar]
- Li, Z.; Openshaw, S. Algorithms for automated line generalization1 based on a natural principle of objective generalization. Int. J. Geogr. Inf. Sci. 1992, 6, 373–389. [Google Scholar] [CrossRef]
- Shi, W.; Cheung, C. Performance Evaluation of Line Simplification Algorithms for Vector Generalization. Cartogr. J. 2006, 43, 27–44. [Google Scholar] [CrossRef]
- Lang, T. Rules for the robot draughtsmen. Comput. Geosci. 1969, 42, 50–51. [Google Scholar]
- Rcumann, K.; Witkam, A.P.M. Optimizing curve segmentation in computer graphics. In Proceedings of the International Computing Symposium, Davos, Switzerland, 4–7 September 1973; pp. 467–472. [Google Scholar]
- Cromley, R.G. Principal axis line simplification. Cartogr. J. 1992, 18, 1003–1011. [Google Scholar] [CrossRef]
- Zhao, Z.; Saalfeld, A. Linear-time sleeve-fitting polyline simplification algorithms. In Proceedings of the AutoCarto 13, Seattle, WA, USA, 7–10 April 1997. [Google Scholar]
- McMaster, R.B.; Shea, K.S. Generalization in Digital Cartography; Association of American Geographers: Washington, DC, USA, 1992. [Google Scholar]
- De Berg, M.; van Kreveld, M.; Schirra, S. Topologically Correct Subdivision Simplification Using the Bandwidth Criterion. Cartogr. Geogr. Inf. Syst. 2013, 25, 243–257. [Google Scholar] [CrossRef]
- Yu, J.; Chen, G.; Zhang, X.; Chen, W.; Pu, Y. An improved Douglas-Peucker algorithm aimed at simplifying natural shoreline into direction-line. In Proceedings of the 2013 21st International Conference on Geoinformatics, Kaifeng, China, 20–22 June 2013; pp. 1–5. [Google Scholar]
- Goyal, R.K.; Egenhofer, M.J. Similarity Assessment for Cardinal Directions between Extended Spatial Objects; University of Maine: Orono, ME, USA, 2000. [Google Scholar]
- Goyal, R.K.; Egenhofer, M.J. Consistent queries over cardinal directions across different levels of detail. In Proceedings of the 11th International Workshop on Database and Expert Systems Applications, Washington, DC, USA, 10–13 September 2000; pp. 876–880. [Google Scholar]
- Tang, L.; Yang, B.; Xu, K. The Road Data Change Detection Based on Linear Shape Similarity. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 367–370. [Google Scholar]
- Tang, L.; Li, Q.; Xu, F.; Chang, X. One new method for road data shape change detection. In Proceedings of the International Symposium on Spatial Analysis, Spatial-Temporal Data Modeling, and Data Mining, Wuhan, China, 13 October 2009; p. 749209. [Google Scholar]
- Chehreghan, A.; Ali Abbaspour, R. An assessment of spatial similarity degree between polylines on multi-scale, multi-source maps. Geocarto Int. 2017, 32, 471–487. [Google Scholar] [CrossRef]
- Yang, B. A multi-resolution model of vector map data for rapid transmission over the Internet. Comput. Geoences 2005, 31, 569–578. [Google Scholar] [CrossRef]
- Yan, H.; Zhang, L.; Wang, Z.; Yang, W.; Liu, T.; Zhou, L. Quantitative Expressions of Spatial Similarity in Multi-scale Map Spaces. In Proceedings of the International Cartographic Conference, Washington, DC, USA, 2–7 July 2017; pp. 405–416. [Google Scholar]
- Lewis, J.A.; Egenhofer, M.J. Point Partitions: A Qualitative Representation for Region-Based Spatial Scenes in ℝ2. In Proceedings of the International Conference on Geographic Information Science, Montreal, QC, Canada, 27–30 September 2016. [Google Scholar]
- Buttenfield, B.P. Transmitting Vector Geospatial Data across the Internet. In Proceedings of the International Conference on Geographic Information Science, Boulder, CO, USA, 25–28 September 2002; pp. 25–28. [Google Scholar]
- Guo, Q.; Liu, Y.; Li, M.; Cheng, X.; He, J.; Wang, H.; Wei, Z. A progressive simplification method of navigation road map based on mesh model. Acta Geod. Cartogr. Sin. 2019, 48, 1357–1368. [Google Scholar] [CrossRef]
- Chai, Z.; Liang, S. A node-priority based large-scale overlapping community detection using evolutionary multi-objective optimization. Evol. Intell. 2020, 13, 59–68. [Google Scholar] [CrossRef]
- Rosvall, M.; Bergstrom, C.T. Maps of random walks on complex networks reveal community structure. Proc. Natl. Acad. Sci. USA 2008, 105, 1118–1123. [Google Scholar] [CrossRef] [Green Version]
- Fortunato, S. Community detection in graphs. Phys. Rep. 2010, 486, 75–174. [Google Scholar] [CrossRef] [Green Version]
- Newman, M.E. Modularity and community structure in networks. Proc. Natl. Acad. Sci. USA 2006, 103, 8577–8582. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Zhang, Y.; Ai, T.; Guan, Q.; Chen, Z.; Li, H. Road network generalization considering traffic flow patterns. Int. J. Geogr. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- De Jong, K.A. Analysis of the Behavior of a Class of Genetic Adaptive Systems; University of Michigan: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Zoraster, S. Practical results using simulated annealing for point feature label placement. Int. J. Geogr. Inf. Sci. 1997, 24, 228–238. [Google Scholar] [CrossRef]
- Ware, J.M.; Jones, C.B.; Thomas, N. Automated map generalization with multiple operators: A simulated annealing approach. Int. J. Geogr. Inf. Sci. 2003, 17, 743–769. [Google Scholar] [CrossRef]
- Ware, J.M.; Wilson, I.D.; Ware, J.A. A knowledge based genetic algorithm approach to automating cartographic generalisation. In Applications and Innovations in Intelligent Systems X; Springer: Berlin/Heidelberg, Germany, 2003; pp. 33–49. [Google Scholar]
- Li, Z.; Yan, H.; Ai, T.; Chen, J. Automated building generalization based on urban morphology and Gestalt theory. Cartogr. Int. J. Geogr. Inf. 2004, 18, 513–534. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Dubuisson, M.; Jain, A.K. A modified Hausdorff distance for object matching. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; pp. 566–568. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Crossing rate | Variability rate | Population size | Max Genetic | Number of elites |
| Threshold | 0.8 | 0.1 | 100 | 1000 | 20 |
| City | Our Algorithm (m) | Opheim Algorithm (m) | VW Algorithm (m) | DP Algorithm (m) |
|---|---|---|---|---|
| Chongqing | 0.308 | 0.390 | 0.671 | 1.043 |
| Chengdu | 0.223 | 0.277 | 0.446 | 0.852 |
| Guangzhou | 0.246 | 0.296 | 0.571 | 0.784 |
| Shanghai | 0.205 | 0.240 | 0.357 | 0.769 |
| Changes in Azimuth Angle | Chongqing (°) | Chengdu (°) | Guangzhou (°) | Shanghai (°) |
|---|---|---|---|---|
| Without adjustment | 0.527 | 0.342 | 0.392 | 0.321 |
| With adjustment | 0.439 | 0.284 | 0.334 | 0.265 |
| Changes in Turning Angle | Chongqing (°) | Chengdu (°) | Guangzhou (°) | Shanghai (°) |
|---|---|---|---|---|
| Without adjustment | 2.707 | 2.338 | 2.345 | 2.402 |
| With adjustment | 1.869 | 1.628 | 1.671 | 1.676 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Wang, H.; He, J.; Zhou, C.; Liu, Y.; Xing, B.; Jia, Z.; Li, M. Graphic Simplification and Intelligent Adjustment Methods of Road Networks for Navigation with Reduced Precision. ISPRS Int. J. Geo-Inf. 2020, 9, 490. https://doi.org/10.3390/ijgi9080490
Guo Q, Wang H, He J, Zhou C, Liu Y, Xing B, Jia Z, Li M. Graphic Simplification and Intelligent Adjustment Methods of Road Networks for Navigation with Reduced Precision. ISPRS International Journal of Geo-Information. 2020; 9(8):490. https://doi.org/10.3390/ijgi9080490
Chicago/Turabian StyleGuo, Qingsheng, Huihui Wang, Jie He, Chuanqi Zhou, Yang Liu, Bin Xing, Zhijie Jia, and Meng Li. 2020. "Graphic Simplification and Intelligent Adjustment Methods of Road Networks for Navigation with Reduced Precision" ISPRS International Journal of Geo-Information 9, no. 8: 490. https://doi.org/10.3390/ijgi9080490
APA StyleGuo, Q., Wang, H., He, J., Zhou, C., Liu, Y., Xing, B., Jia, Z., & Li, M. (2020). Graphic Simplification and Intelligent Adjustment Methods of Road Networks for Navigation with Reduced Precision. ISPRS International Journal of Geo-Information, 9(8), 490. https://doi.org/10.3390/ijgi9080490