
Short-Arc Horizon-Based Optical Navigation by Total Least-Squares Estimation

Abstract
:1. Introduction
2. Brief Review of Horizon-Based Optical Navigation
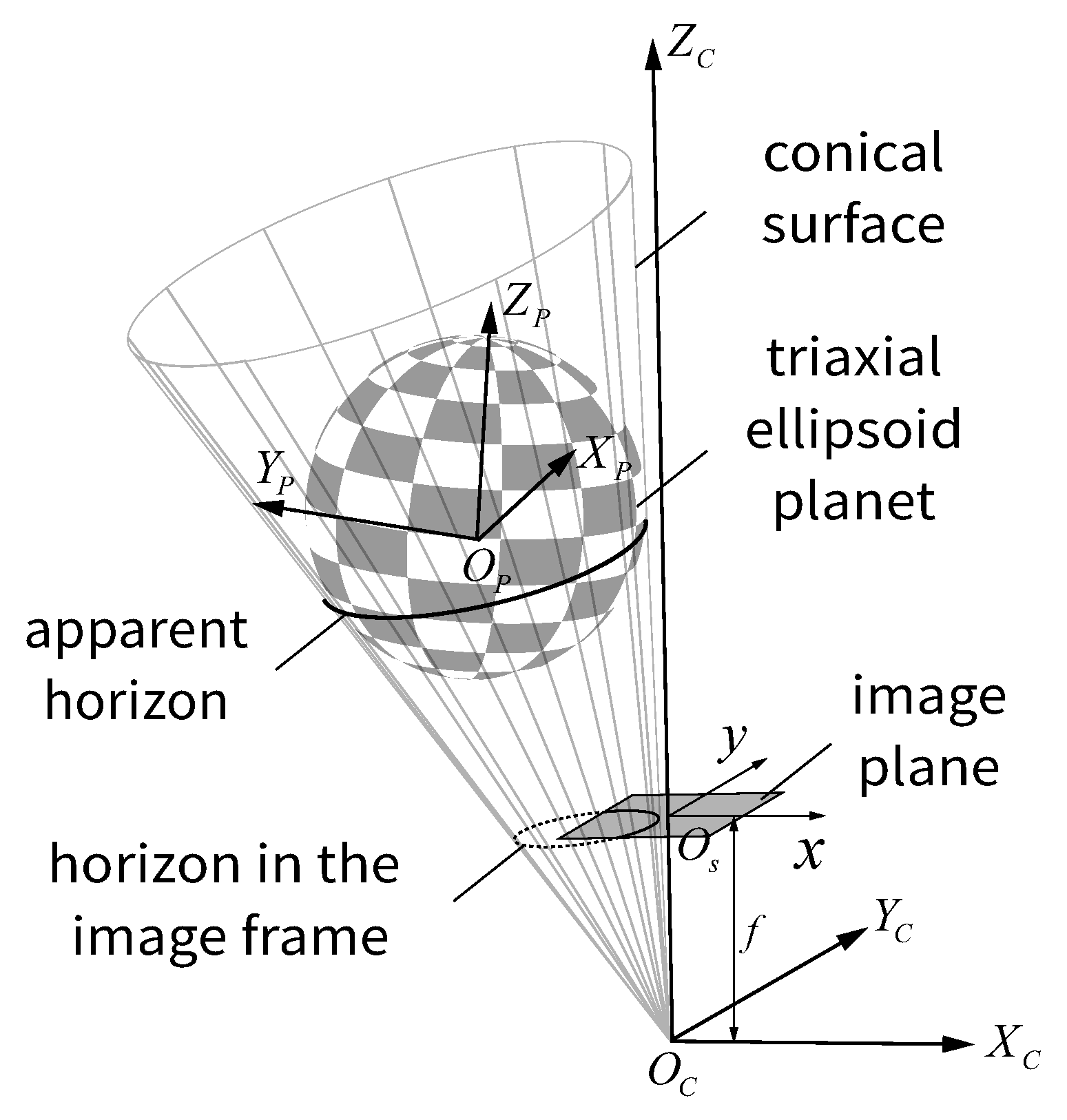
2.1. Geometry Fundamentals
2.2. The Christian–Robinson Algorithm
- (1)
- Convert the camera’s horizon measurement to in Cholesky factorization space:where can be obtained from Equation (4) as:and the expression of is as follows:
- (2)
- Normalize to :
- (3)
- The problem is converted to solving for in the following measurement equations:where:, n is the total number of horizon measurement points.
- (4)
- The solution of could be found by:
3. Total Least-Squares Estimation
3.1. Estimation Bias Caused by Least-Squares Estimation
3.2. Simplified Measurement Covariance Model
3.3. Element-Wise Weighted Total Least-Squares Algorithm
- (1)
- Calculate the covariance of each set of measurements with Equation (25).
- (2)
- Take the LS estimation as the initial estimate with Equation (13).
- (3)
- (4)
- The iteration is stopped when the final change is less than the tolerance value, or when the number of iterations is greater than the maximum number of iterations (MaxIterations). The iteration stopping conditions are specified as:
3.4. Approximate Generalized Total Least-Squares Algorithm
- (1)
- (2)
- Prepare for Cholesky factorization of matrix . According to Equation (32), should be equal to zero, while this will lead to a rank deficient of . In addition, the covariance matrix is a positive semi-definite matrix. With the change in spacecraft position and attitude, and considering the machine computational accuracy, will sometimes have an eigenvalue close to zero or even negative. These factors block the Cholesky decomposition of the matrix and affect the implementation of the algorithm. Thus, the approximate covariance matrix is obtained by making a simple but effective adjustment to .where is a very small value, e.g., , and is much smaller than every element in the matrix . Such an approximation hardly affects the distribution of covariances and ensures that the matrix is positive definite.
- (3)
- Perform a Cholesky factorization on the matrix :Then partition the inverse of as:where is an matrix, is an vector, and is a scalar.
- (4)
- Perform a singular value decomposition on the following matrix:Then partition as:where , and are matrixes, is an matrix, is a scalar, and and are both vectors.
- (5)
- The final solution is given by [27]:
3.5. Analytic Solution Covariance
4. Numerical Results
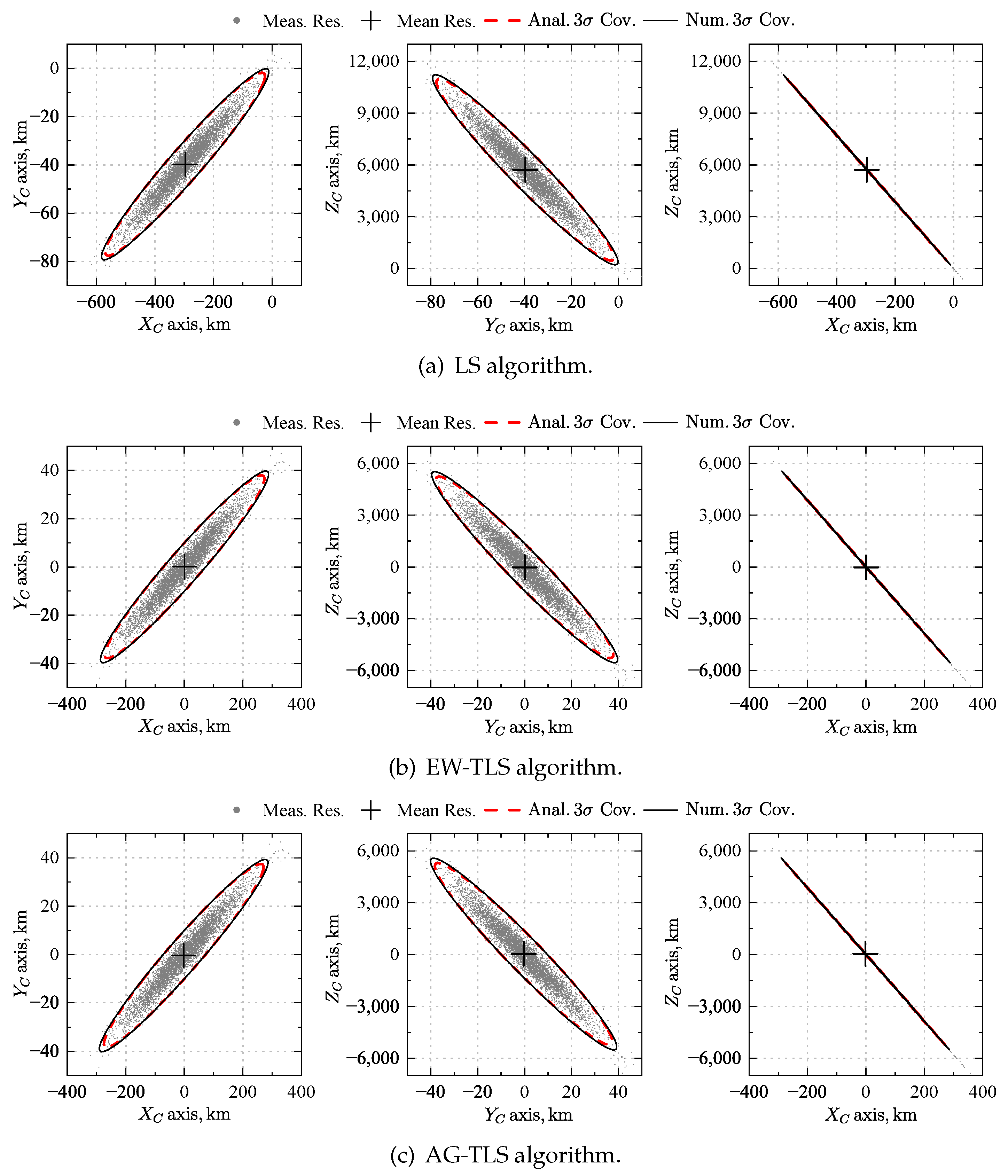
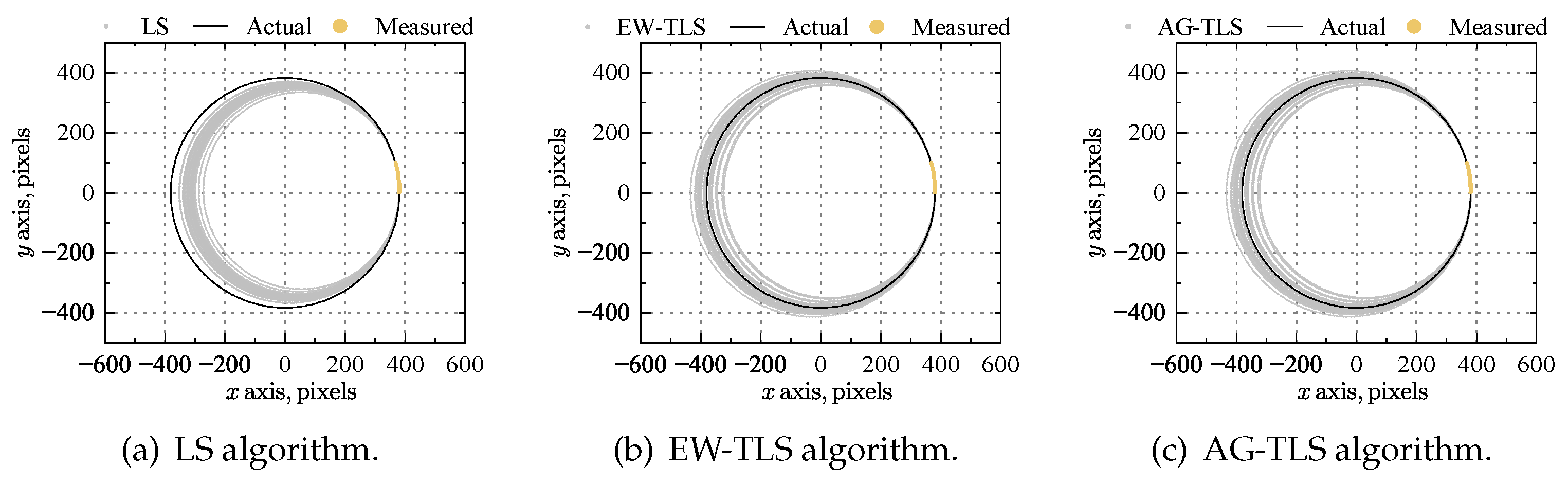
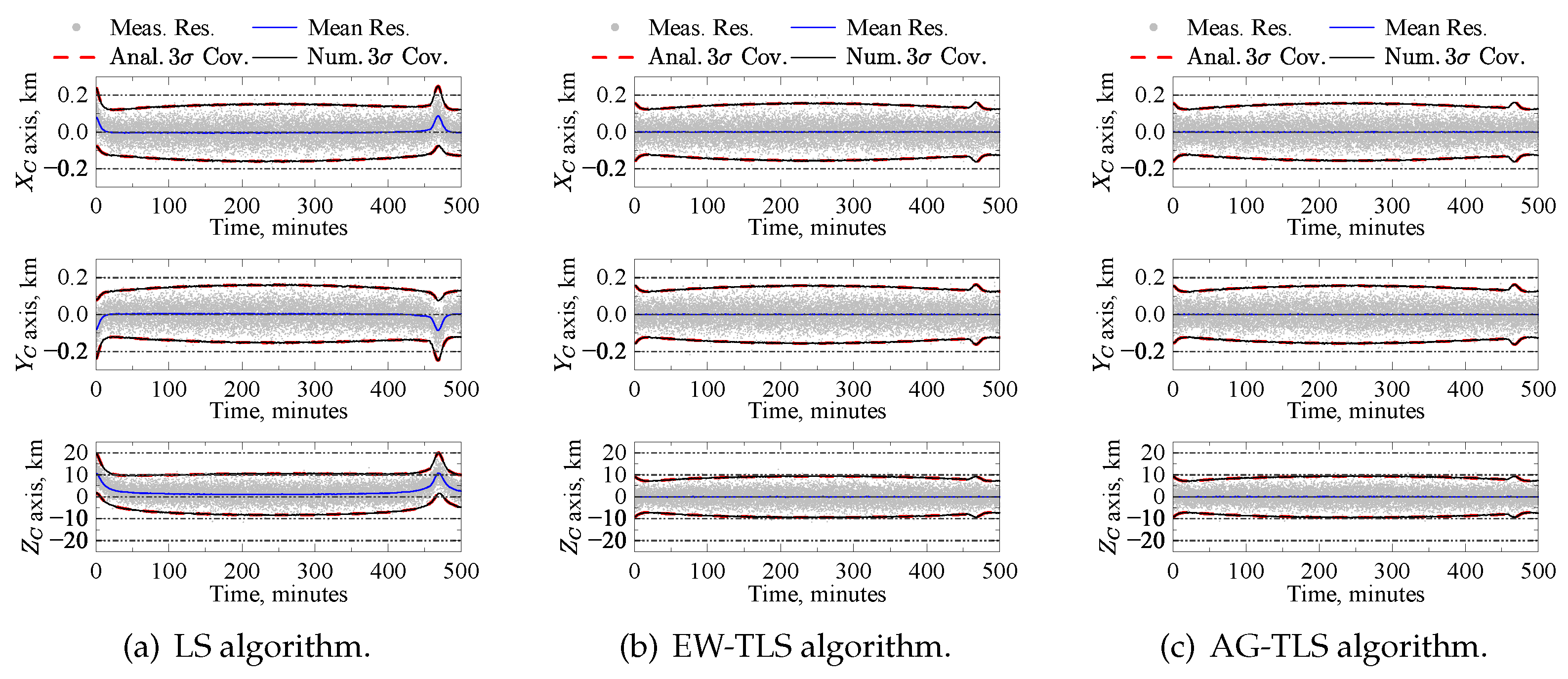
4.1. Performance under a Short-Arc Horizon
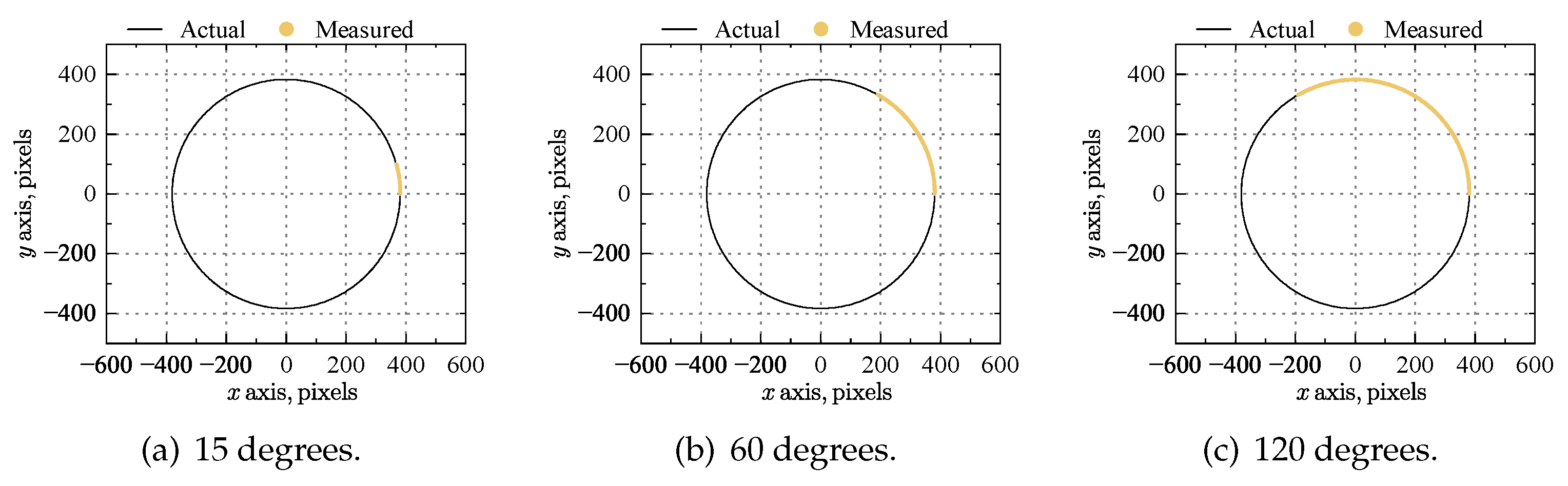
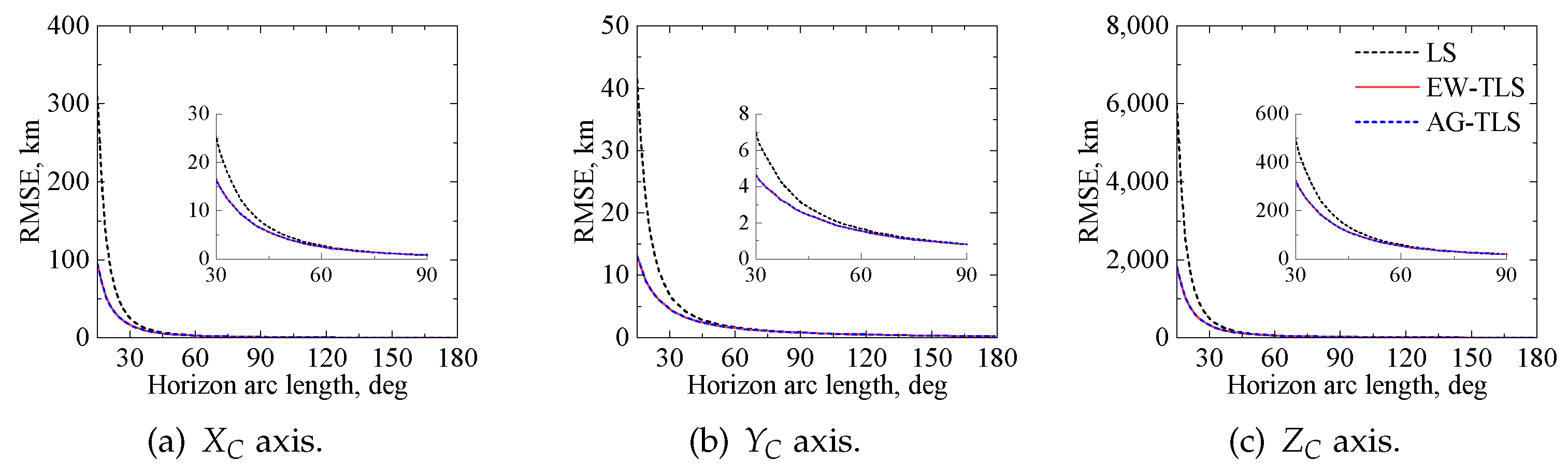
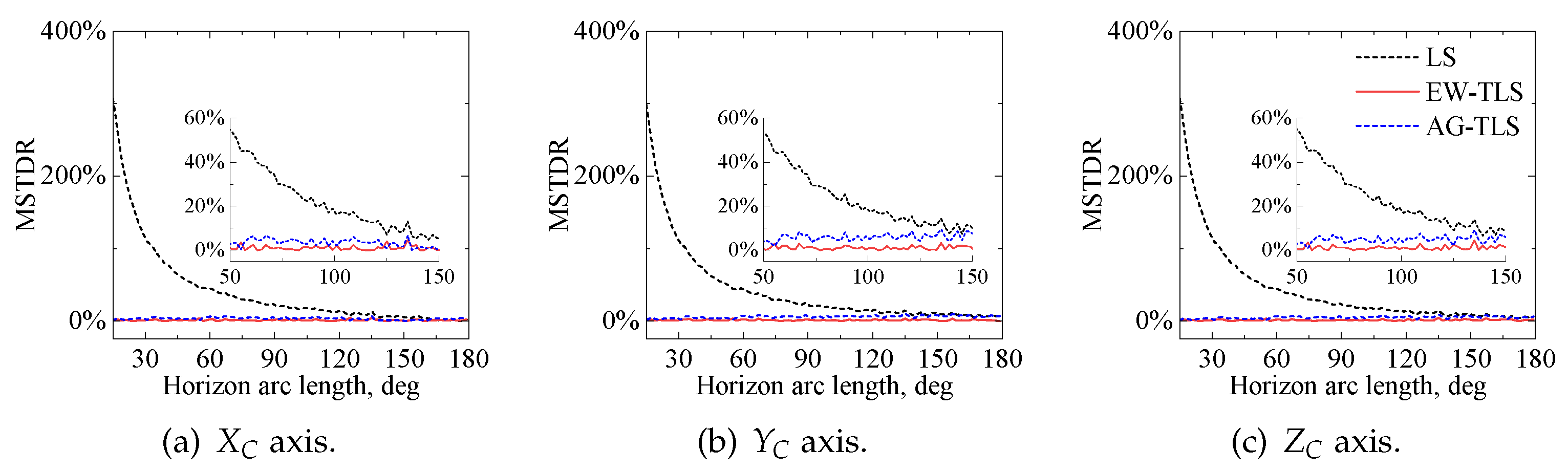
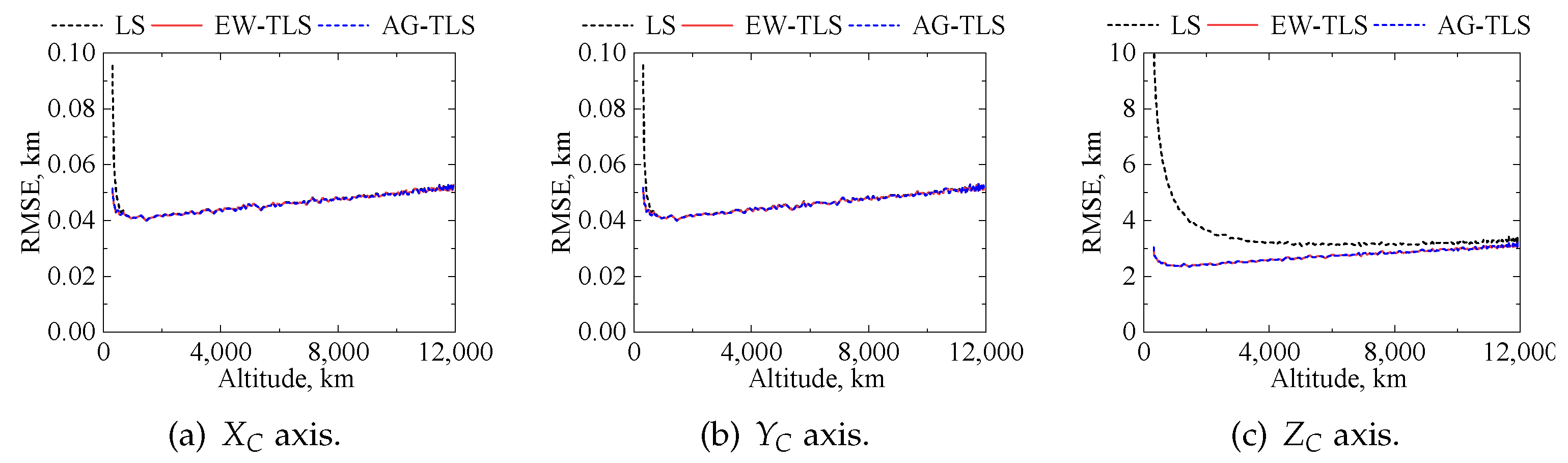
4.2. Performance under Different Horizon Arc Lengths
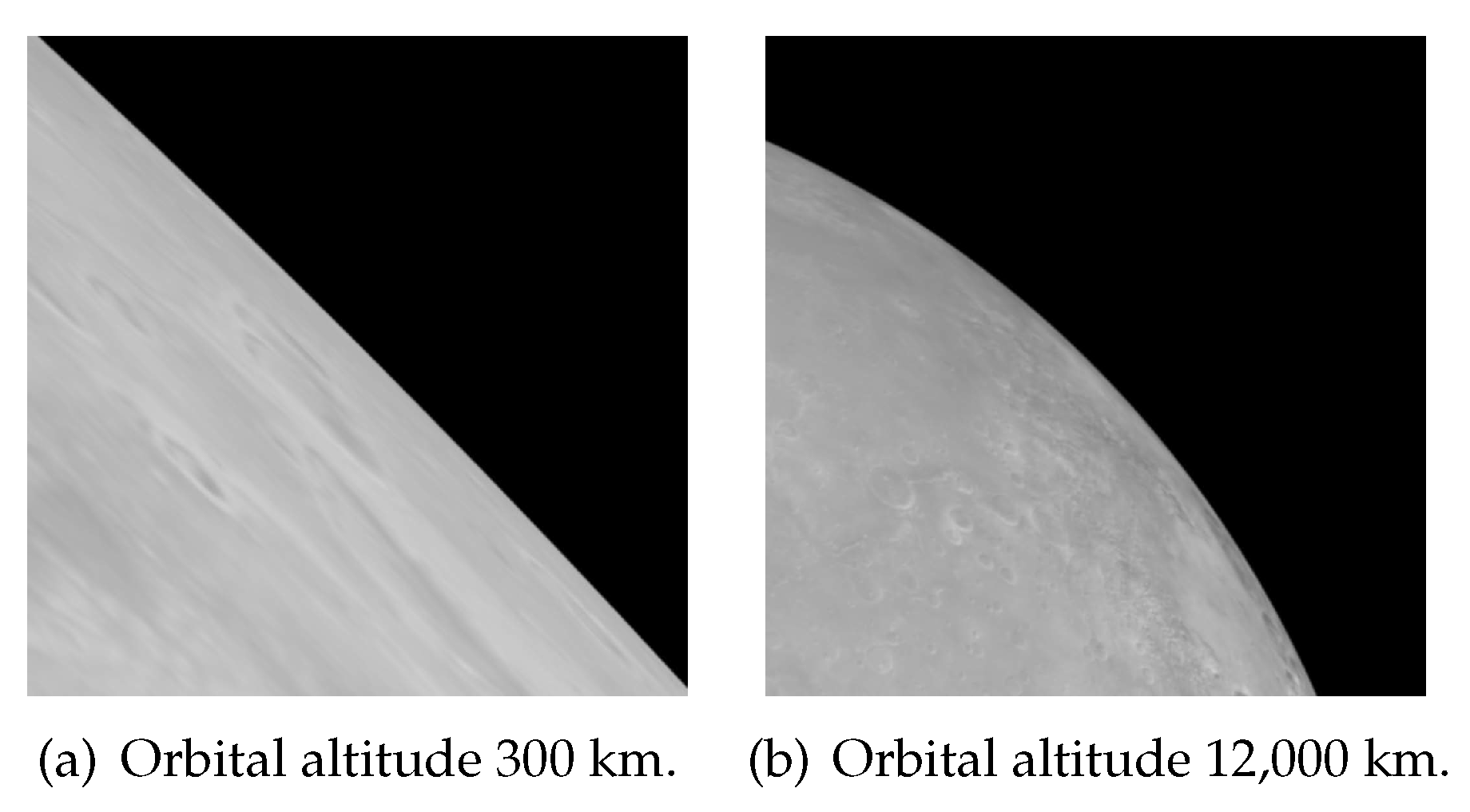
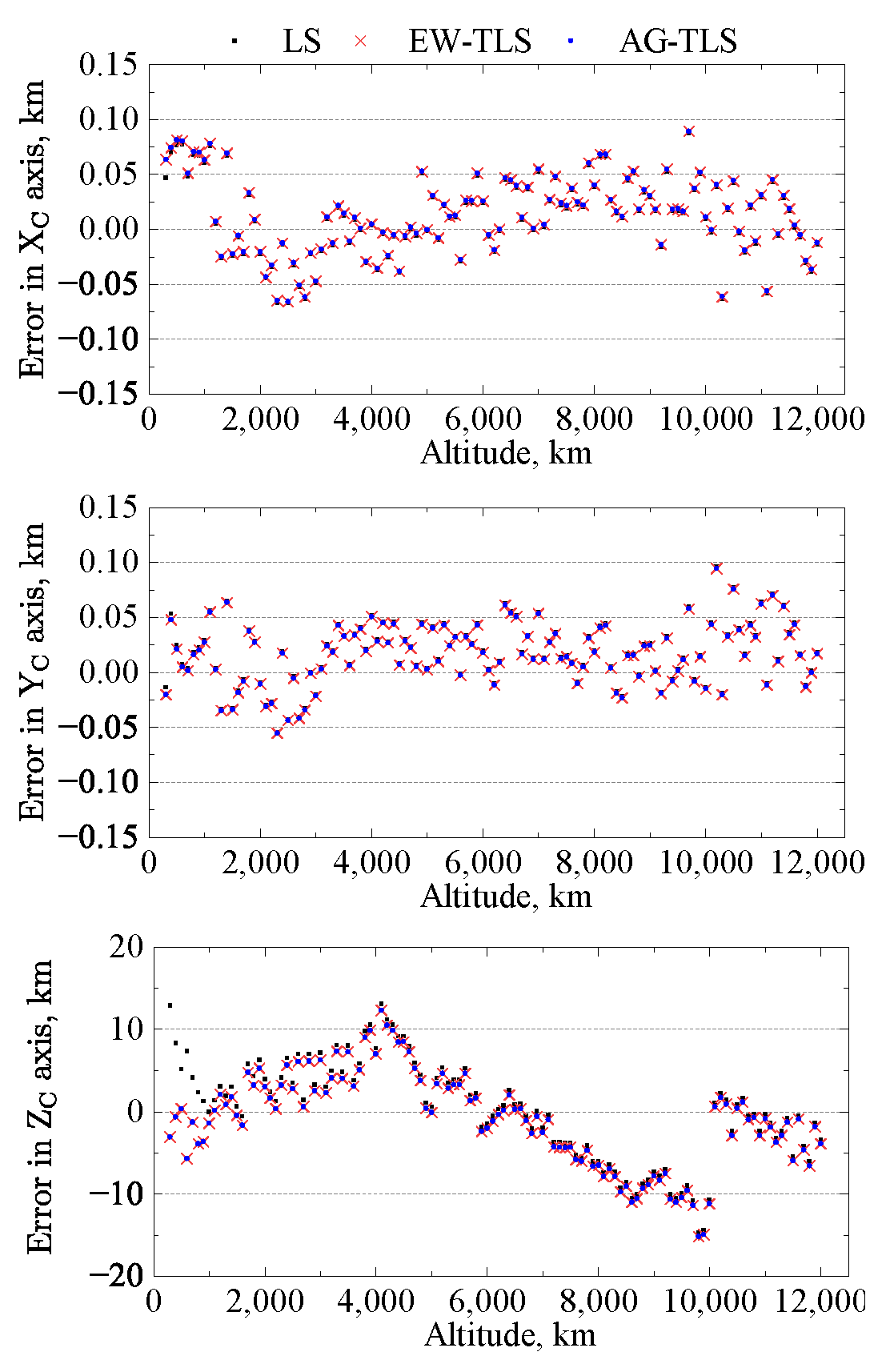
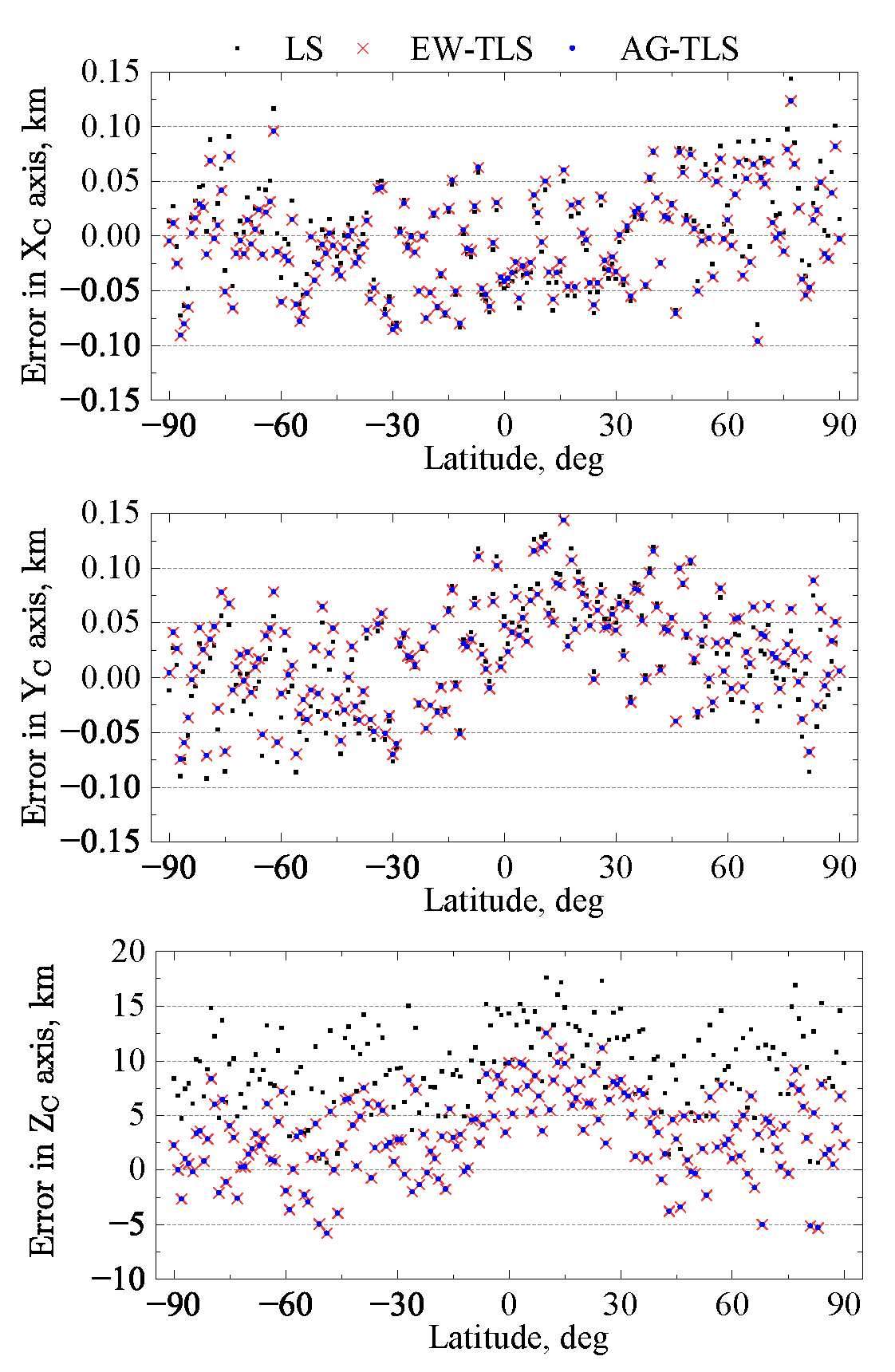
4.3. Opnav Performance in a Highly Elliptical Orbit
4.4. OPNAV Performance with Synthetic Images
- (1)
- First, the basic simulation environment is built in Blender, including building Mars using its parameters and surface textures [45], setting up the navigation camera, and adding a light source to model the Sun. The parameters of the navigation camera are consistent with the previous section.
- (2)
- Next, automated rendering is implemented using the Python interface provided by Blender. Specifically, Python scripts are used to set the position and attitude of the sun and camera for each simulation scene, and the cycles engine is used to render photorealistic images. The camera is always pointed with its back to the Sun and toward the horizon of Mars to achieve good imaging.
- (3)
- Finally, MATLAB is used for image processing of rendered images. The images are convoluted by a Gaussian kernel with an STD of 1.5 pixels to simulate the effect of defocusing, then the algorithm proposed in [13] is employed to achieve subpixel edge localization.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, X.; Li, M.; Wang, X.; Hu, J.; Zhao, Y.; Guo, M.; Xu, C.; Liu, W.; Wang, Y.; Hao, C.; et al. The Tianwen-1 guidance, navigation, and control for Mars entry, descent, and landing. Space Sci. Technol. 2021, 2021, 13. [Google Scholar] [CrossRef]
- Williford, K.H.; Farley, K.A.; Stack, K.M.; Allwood, A.C.; Beaty, D.; Beegle, L.W.; Bhartia, R.; Brown, A.J.; de la Torre Juarez, M.; Hamran, S.E.; et al. The NASA Mars 2020 rover mission and the search for extraterrestrial life. In From habitability to life on Mars; Elsevier: Amsterdam, The Netherlands, 2018; pp. 275–308. [Google Scholar] [CrossRef]
- Gu, L.; Jiang, X.; Li, S.; Li, W. Optical/radio/pulsars integrated navigation for Mars orbiter. Adv. Space Res. 2019, 63, 512–525. [Google Scholar] [CrossRef]
- Bhaskaran, S. Autonomous Optical-Only Navigation for Deep Space Missions. In ASCEND 2020; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020; p. 4139. [Google Scholar] [CrossRef]
- Hoag, D.G. The history of Apollo onboard guidance, navigation, and control. J. Guid. Control. Dyn. 1983, 6, 4–13. [Google Scholar] [CrossRef]
- Bhaskaran, S.; Desai, S.; Dumont, P.; Kennedy, B.; Null, G.; Owen, W., Jr.; Riedel, J.; Synnott, S.; Werner, R. Orbit Determination Performance Evaluation of the Deep Space 1 Autonomous Navigation System; JPL Open Repository: Pasadena, CA, USA, 1998; Available online: https://hdl.handle.net/2014/19040 (accessed on 6 April 2023).
- Foing, B.; Racca, G.; Marini, A.; Koschny, D.; Frew, D.; Grieger, B.; Camino-Ramos, O.; Josset, J.; Grande, M. SMART-1 technology, scientific results and heritage for future space missions. Planet. Space Sci. 2018, 151, 141–148. [Google Scholar] [CrossRef] [Green Version]
- Holt, G.N.; D’Souza, C.N.; Saley, D.W. Orion optical navigation progress toward exploration mission 1. In Proceedings of the 2018 Space Flight Mechanics Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 1978. [Google Scholar] [CrossRef] [Green Version]
- Bradley, N.; Olikara, Z.; Bhaskaran, S.; Young, B. Cislunar navigation accuracy using optical observations of natural and artificial targets. J. Spacecr. Rocket. 2020, 57, 777–792. [Google Scholar] [CrossRef]
- Hu, Y.; Bai, X.; Chen, L.; Yan, H. A new approach of orbit determination for LEO satellites based on optical tracking of GEO satellites. Aerosp. Sci. Technol. 2019, 84, 821–829. [Google Scholar] [CrossRef]
- Liebe, C.C. Accuracy performance of star trackers-a tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Christian, J.A. Optical navigation using planet’s centroid and apparent diameter in image. J. Guid. Control. Dyn. 2015, 38, 192–204. [Google Scholar] [CrossRef]
- Christian, J.A. Accurate planetary limb localization for image-based spacecraft navigation. J. Spacecr. Rocket. 2017, 54, 708–730. [Google Scholar] [CrossRef]
- Shang, L.; Chang, J.; Zhang, J.; Li, G. Precision analysis of autonomous orbit determination using star sensor for Beidou MEO satellite. Adv. Space Res. 2018, 61, 1975–1983. [Google Scholar] [CrossRef]
- Modenini, D. Attitude determination from ellipsoid observations: A modified orthogonal procrustes problem. J. Guid. Control. Dyn. 2018, 41, 2324–2326. [Google Scholar] [CrossRef]
- Christian, J.A. Autonomous initial orbit determination with optical observations of unknown planetary landmarks. J. Spacecr. Rocket. 2019, 56, 211–220. [Google Scholar] [CrossRef]
- Christian, J.A.; Derksen, H.; Watkins, R. Lunar crater identification in digital images. J. Astronaut. Sci. 2021, 68, 1056–1144. [Google Scholar] [CrossRef]
- McCarthy, L.K.; Adam, C.D.; Leonard, J.M.; Antresian, P.G.; Nelson, D.; Sahr, E.; Pelgrift, J.; Lessac-Chenen, E.J.; Geeraert, J.; Lauretta, D. OSIRIS-REx Landmark Optical Navigation Performance During Orbital and Close Proximity Operations at Asteroid Bennu. In Proceedings of the AIAA SCITECH 2022 Forum, Reston, VA, USA, 15 December 2022; p. 2520. [Google Scholar] [CrossRef]
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Bloise, I.; Feruglio, L.; Lunghi, P.; Lavagna, M.; Varile, M. Optical navigation for Lunar landing based on Convolutional Neural Network crater detector. Aerosp. Sci. Technol. 2022, 123, 107503. [Google Scholar] [CrossRef]
- Christian, J.A. Optical navigation using iterative horizon reprojection. J. Guid. Control. Dyn. 2016, 39, 1092–1103. [Google Scholar] [CrossRef]
- Teil, T.; Schaub, H.; Kubitschek, D. Centroid and Apparent Diameter Optical Navigation on Mars Orbit. J. Spacecr. Rocket. 2021, 58, 1107–1119. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Z.y.; Wang, B.d.; Jin, Z.h.; Crassidis, J.L. Infrared Earth sensor with a large field of view for low-Earth-orbiting micro-satellites. Front. Inf. Technol. Electron. Eng. 2021, 22, 262–271. [Google Scholar] [CrossRef]
- Hu, J.; Yang, B.; Liu, F.; Zhu, Q.; Li, S. Optimization of short-arc ellipse fitting with prior information for planetary optical navigation. Acta Astronaut. 2021, 184, 119–127. [Google Scholar] [CrossRef]
- Christian, J.A.; Robinson, S.B. Noniterative horizon-based optical navigation by cholesky factorization. J. Guid. Control. Dyn. 2016, 39, 2757–2765. [Google Scholar] [CrossRef]
- Christian, J.A. A Tutorial on Horizon-Based Optical Navigation and Attitude Determination with Space Imaging Systems. IEEE Access 2021, 9, 19819–19853. [Google Scholar] [CrossRef]
- Franzese, V.; Di Lizia, P.; Topputo, F. Autonomous optical navigation for the lunar meteoroid impacts observer. J. Guid. Control. Dyn. 2019, 42, 1579–1586. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Junkins, J.L. Optimal Estimation of Dynamic Systems; CRC Press: Boca Raton, FL, USA, 2012; Chapters 2 and 8. [Google Scholar]
- Crassidis, J.L.; Cheng, Y. Error-covariance analysis of the total least-squares problem. J. Guid. Control. Dyn. 2014, 37, 1053–1063. [Google Scholar] [CrossRef] [Green Version]
- Crassidis, J.L.; Cheng, Y. Maximum likelihood analysis of the total least squares problem with correlated errors. J. Guid. Control. Dyn. 2019, 42, 1204–1217. [Google Scholar] [CrossRef]
- Wang, B.; Li, J.; Liu, C.; Yu, J. Generalized Total Least Squares Prediction Algorithm for Universal 3D Similarity Transformation. Adv. Space Res. 2017, 59, 815–823. [Google Scholar] [CrossRef]
- Cheng, Y.; Crassidis, J.L. A Total Least-Squares Estimate for Attitude Determination. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–9 January 2019; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2019; p. 1176. [Google Scholar] [CrossRef] [Green Version]
- Almekkawy, M.; Carević, A.; Abdou, A.; He, J.; Lee, G.; Barlow, J. Regularization in ultrasound tomography using projection-based regularized total least squares. Inverse Probl. Sci. Eng. 2020, 28, 556–579. [Google Scholar] [CrossRef]
- Zhou, Z.; Rui, Y.; Cai, X.; Lu, J. Constrained total least squares method using TDOA measurements for jointly estimating acoustic emission source and wave velocity. Measurement 2021, 182, 109758. [Google Scholar] [CrossRef]
- Maleki, S.; Crassidis, J.L.; Cheng, Y.; Schmid, M. Total Least Squares for Optimal Pose Estimation. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1222. [Google Scholar] [CrossRef]
- Van Huffel, S.; Vandewalle, J. On the accuracy of total least squares and least squares techniques in the presence of errors on all data. Automatica 1989, 25, 765–769. [Google Scholar] [CrossRef]
- Schuermans, M.; Markovsky, I.; Wentzell, P.D.; Van Huffel, S. On the equivalence between total least squares and maximum likelihood PCA. Anal. Chim. Acta 2005, 544, 254–267. [Google Scholar] [CrossRef] [Green Version]
- Markovsky, I.; Van Huffel, S. Overview of Total Least-Squares Methods. Signal Process. 2007, 87, 2283–2302. [Google Scholar] [CrossRef] [Green Version]
- Forsyth, D.; Ponce, J. Computer Vision: A Modern Approach; Publishing House of Electronics Industry: Beijing, China, 2017; Chapters 1 and 2. [Google Scholar]
- Cheng, Y.; Crassidis, J.L.; Markley, F.L. Attitude estimation for large field-of-view sensors. J. Astronaut. Sci. 2006, 54, 433–448. [Google Scholar] [CrossRef] [Green Version]
- Shuster, M.D. Kalman filtering of spacecraft attitude and the QUEST model. J. Astronaut. Sci. 1990, 38, 377–393. [Google Scholar]
- Hikes, J.; Liounis, A.J.; Christian, J.A. Parametric covariance model for horizon-based optical navigation. J. Guid. Control. Dyn. 2017, 40, 170–178. [Google Scholar] [CrossRef]
- Community, B.O. Blender—A 3D Modelling and Rendering Package; Blender Foundation: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Scorsoglio, A.; Furfaro, R.; Linares, R.; Gaudet, B. Image-Based Deep Reinforcement Learning for Autonomous Lunar Landing. In Proceedings of the AIAA Scitech 2020 Forum, Charlotte, NC, USA, 31 January–4 February 2021; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2020. [Google Scholar] [CrossRef]
- Smith, K.W.; Anastas, N.; Olguin, A.; Fritz, M.; Sostaric, R.R.; Pedrotty, S.; Tse, T. Building Maps for Terrain Relative Navigation Using Blender: An Open Source Approach. In Proceedings of the AIAA Scitech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2022. [Google Scholar] [CrossRef]
- INOVE. Solar System Scope; 2017. Available online: https://www.solarsystemscope.com/textures/ (accessed on 6 April 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Direction | Mean Residuals, km | STD, km | MSTDR | RMSE, km |
|---|---|---|---|---|---|
| axis | −296.82 | 95.25 | 311.63% | 311.73 | |
| LS | axis | −39.71 | 13.18 | 301.23% | 41.84 |
| axis | 5717.96 | 1834.61 | 311.67% | 6005.01 | |
| axis | 0.84 | 95.77 | 0.88% | 95.76 | |
| EW−TLS | axis | 0.04 | 13.22 | 0.34% | 13.21 |
| axis | −16.24 | 1845.42 | 0.88% | 1845.30 | |
| axis | −1.89 | 95.87 | 1.97% | 95.88 | |
| AG−TLS | axis | −0.37 | 13.23 | 2.78% | 13.24 |
| axis | 36.54 | 1847.53 | 1.97% | 1847.71 |
| Parameter | Value |
|---|---|
| Semi-major axis | 9500 km |
| Eccentricity | 0.61 |
| Inclination | 87 |
| Argument of perige | 320 |
| RAAN | 64 |
| True anomaly | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, H.; Wang, H.; Liu, Y.; Jin, Z. Short-Arc Horizon-Based Optical Navigation by Total Least-Squares Estimation. Aerospace 2023, 10, 371. https://doi.org/10.3390/aerospace10040371
Deng H, Wang H, Liu Y, Jin Z. Short-Arc Horizon-Based Optical Navigation by Total Least-Squares Estimation. Aerospace. 2023; 10(4):371. https://doi.org/10.3390/aerospace10040371
Chicago/Turabian StyleDeng, Huajian, Hao Wang, Yang Liu, and Zhonghe Jin. 2023. "Short-Arc Horizon-Based Optical Navigation by Total Least-Squares Estimation" Aerospace 10, no. 4: 371. https://doi.org/10.3390/aerospace10040371
APA StyleDeng, H., Wang, H., Liu, Y., & Jin, Z. (2023). Short-Arc Horizon-Based Optical Navigation by Total Least-Squares Estimation. Aerospace, 10(4), 371. https://doi.org/10.3390/aerospace10040371