
Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions



Abstract
:1. Introduction
2. Sequential Modelling Strategy
2.1. Overview and Modelling Strategy
2.1.1. Overall Modelling Strategy and Assumptions
2.1.2. Space Debris System Dynamics Assumptions
2.1.3. Net System Dynamics Assumptions
2.1.4. Net and Debris Object Contact Assumptions
2.2. Net Dynamics
2.2.1. Relative Reference System
- x: Radial direction.
- y: Along-track or flight direction.
- z: Cross-track direction.
2.2.2. Net Characteristics
- The net is square-shaped with a side length of .
- The net mass is distributed among point masses, , referred to as nodes (for ).
- Four equal bullets with masses are externally attached to the corners.
- All threads have the same unstretched length, , and diameter, .
- The threads can only stretch in the longitudinal direction.
- The elastic behaviour of all threads is solely characterised by the axial stiffness, , and damping coefficient, .
2.2.3. Equations of Motion for Net Systems
2.3. Contact Dynamics
2.3.1. Contact Detection Strategy
2.3.2. Normal and Friction Contact Force
2.4. Spacecraft Dynamics with Structural Considerations
2.4.1. Reference Frames
2.4.2. Single Rigid-Body Dynamics
2.4.3. Two Rigid-Body Dynamics
2.4.4. Hinge Dynamic Loading
2.5. Structural Modelling
2.5.1. Identifying Weak Locations
2.5.2. Structural Forces and Moments
2.6. Verification and Validation
3. Net Impact and Capturing Risks
3.1. Simulation Inputs and Integration Details
3.2. Net Impact Contact Forces and Moments
3.3. Dynamic Risks
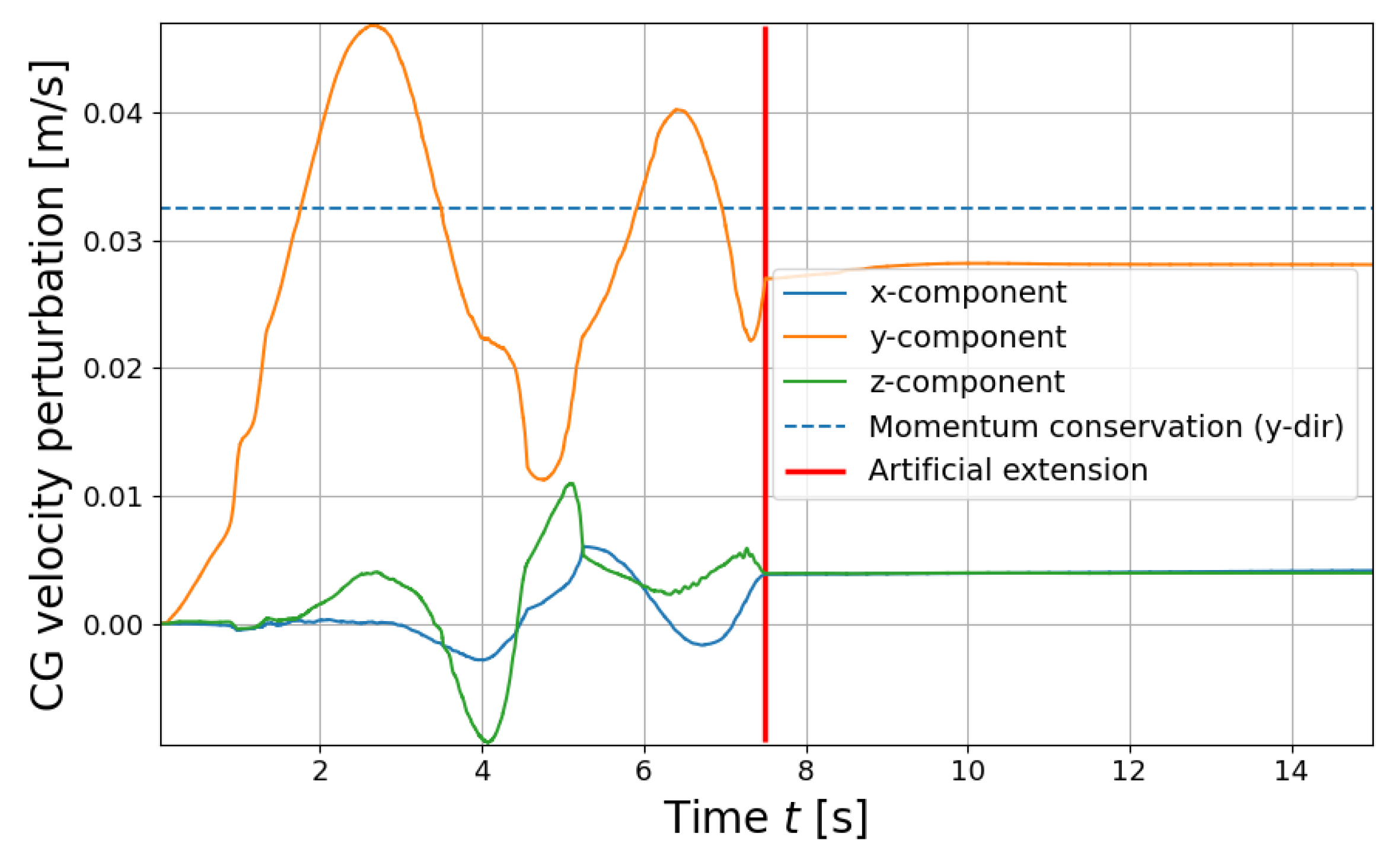
3.3.1. Translational Dynamics Risks
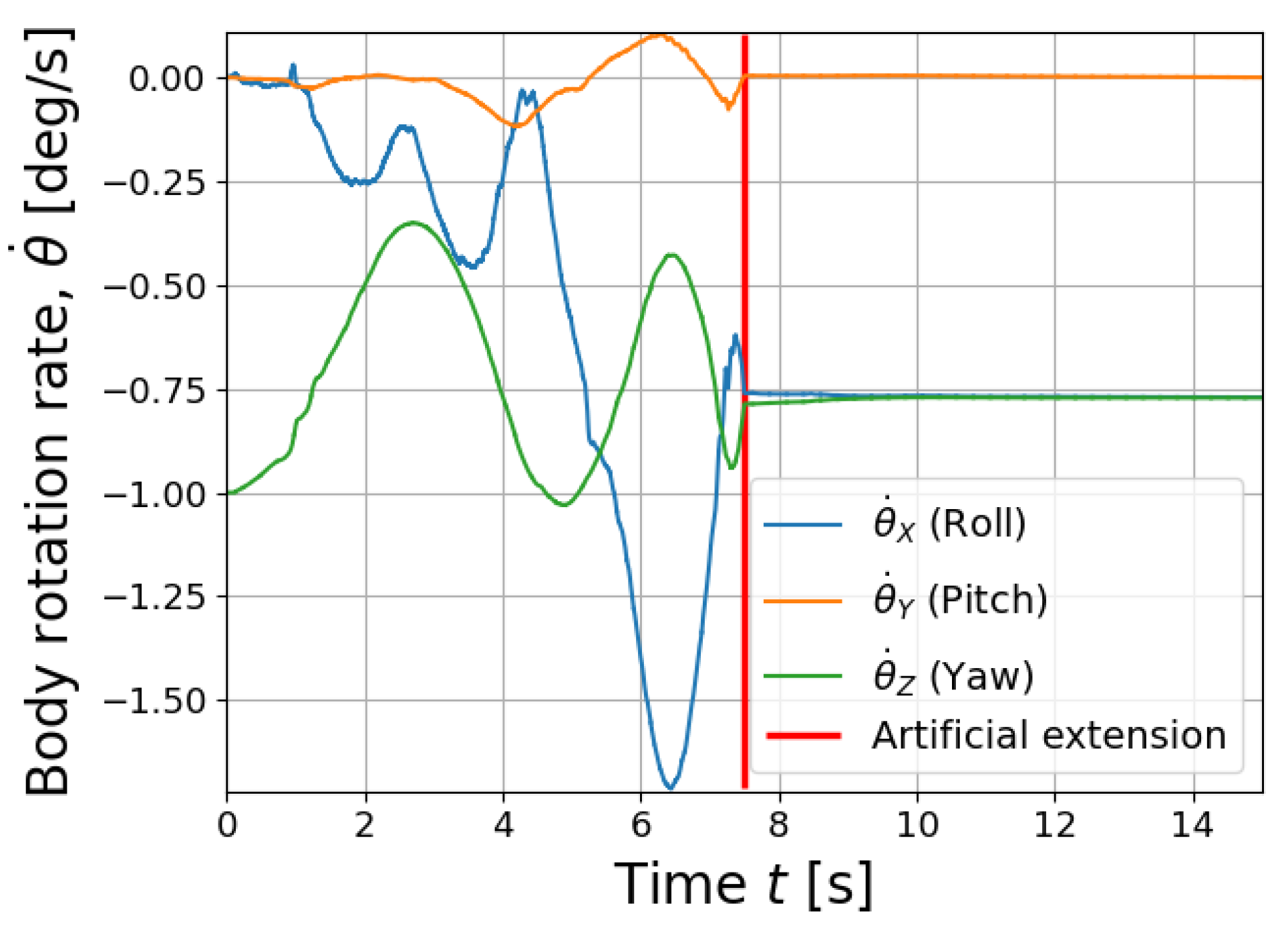
3.3.2. Rotational Dynamics Risks
3.3.3. Solar Array Dynamics Risks
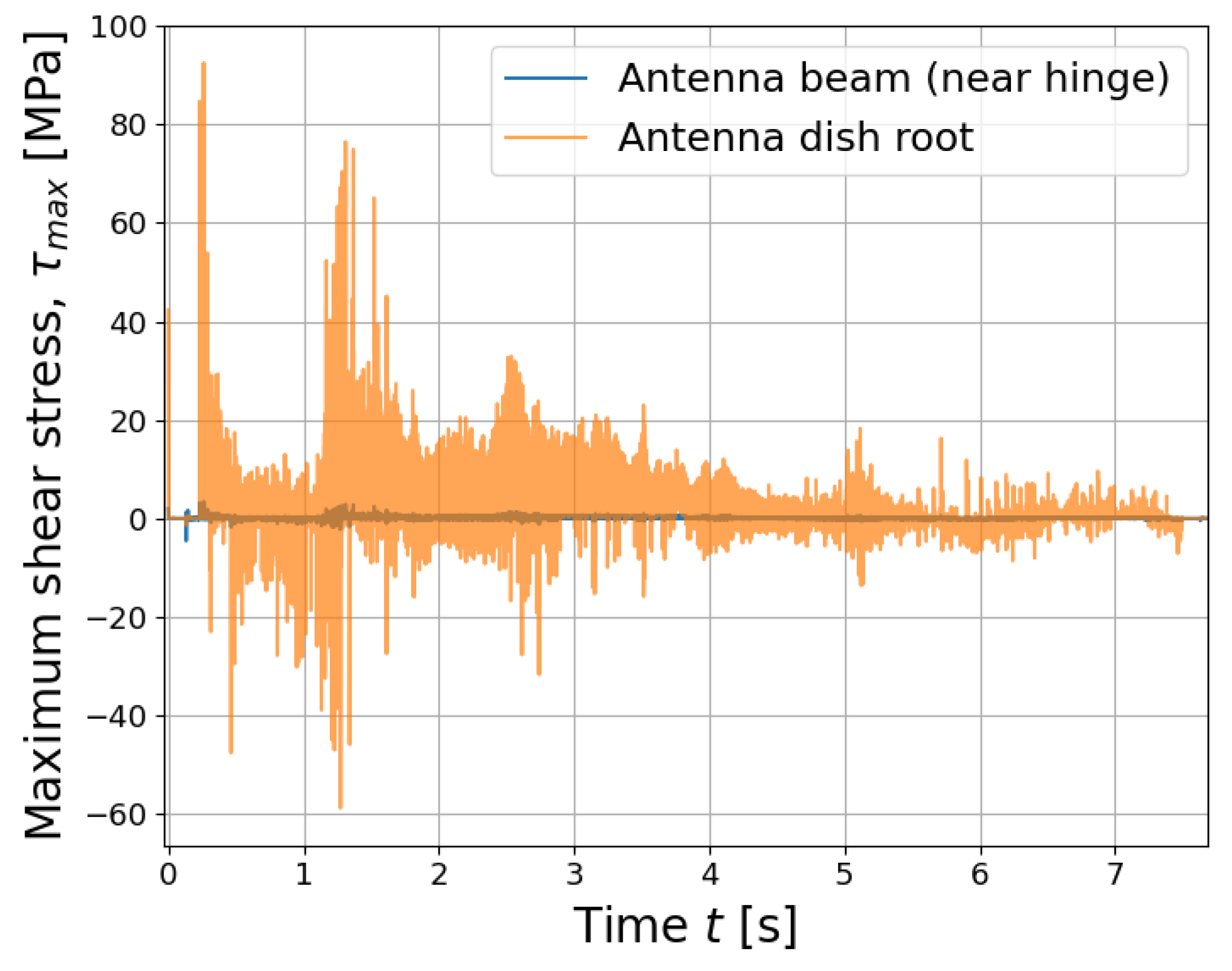
3.4. Structural Risks
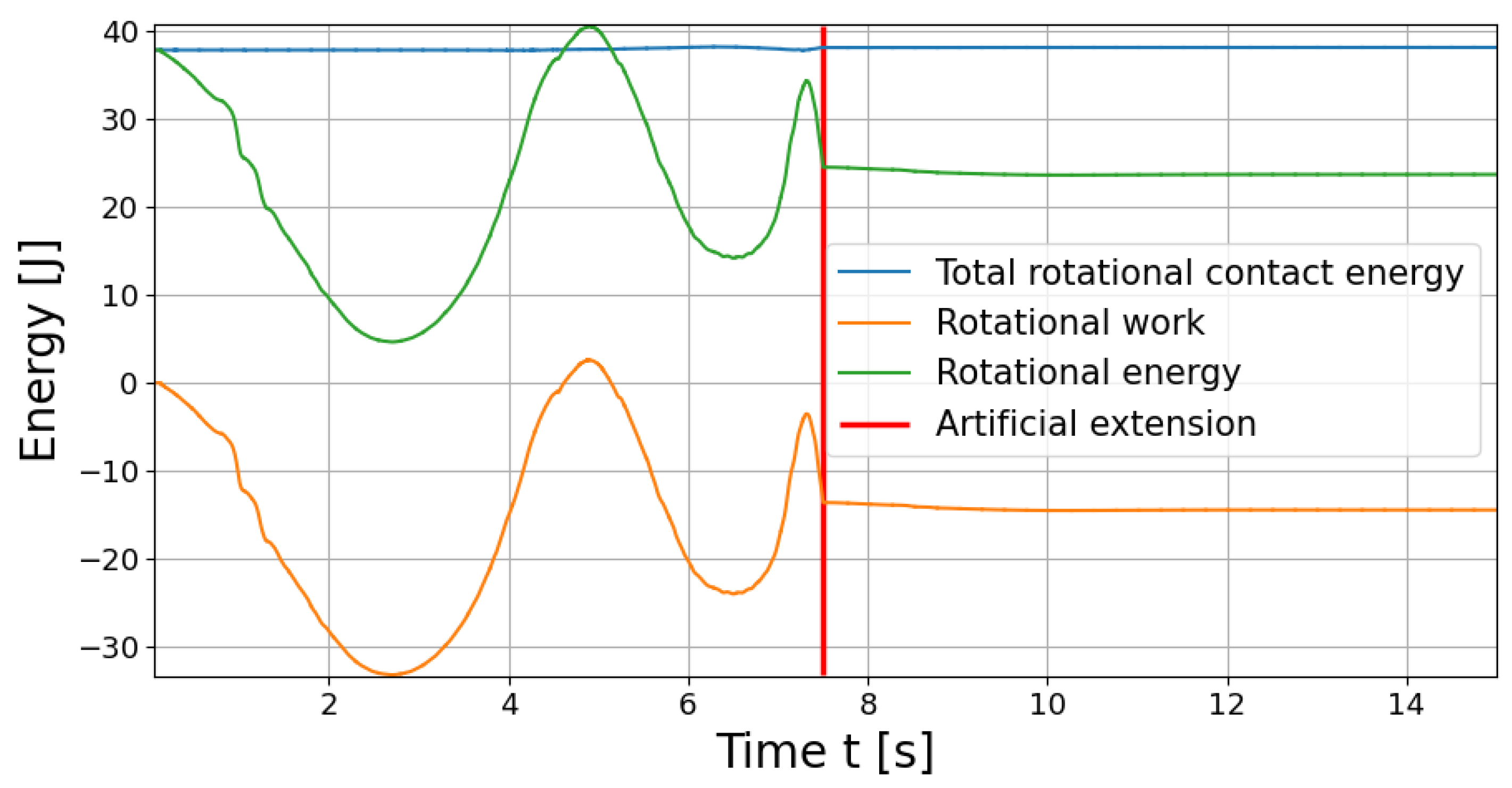
3.5. Energy and Work Validation
- Total rotational energy is approximately constant with a maximum variation of 1 J at .
- Due to the rotational instability around the X-axis and the predicted effect of the modelling strategy itself, the rotational energy exceeds the total rotational energy from to by ∼.
- The system’s energy is entirely conserved without variation during the artificial extension from .
4. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ASAR | Advanced Synthetic Aperture Radar |
| ASDR | Active Space Debris Removal |
| ANCF | Absolute Nodal Coordinate Formulation |
| CFRP | Carbon Fibre-Reinforced Polymer |
| CG or cg | Centre of Gravity |
| CM | Centre of Mass |
| ECM | Elastic Continuum Model |
| EOL | End-of-Life |
| EoM | Equation of Motion |
| Envisat | ENVIronmental SATellite |
| GEO | Geostationary Earth Orbit |
| LEO | Low Earth Orbit |
| LVLH | Local-Vertical-Local-Horizontal |
| MDOF | Multiple Degree of Freedom |
| MEO | Medium Earth Orbit |
| MMOI | Mass Moment of Inertia |
| MSD | Mass-spring-damper model |
| MRB | Multi-rigid-body model |
| PDM | Primary Deployment Mechanism |
| PIP | PDM Interface Plate |
| RK4 | Runge–Kutta 4 (integrator) |
| ROGER | Robotic Geostationary Orbit Restorer |
| SDOF | Single Degree of Freedom |
| TSR | Tethered Space Robot |
Appendix A. Graphical Representations
Appendix A.1. Modelling Strategy Graphical Representation

Appendix A.2. Detection Strategy Graphical Representation

References
- NASA. Orbital Debris Quarterly News, Volume 26—Issue 1. 2022. Available online: https://orbitaldebris.jsc.nasa.gov/quarterly-news/ (accessed on 25 December 2022).
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Formiga, J.K.S.; dos Santos, D.P.S.; de Almeida Prado, A.F.B.; de Moraes, R.V.; Diaz, J.A.A. Ground-based laser effect on space debris maneuvering. Eur. Phys. J. Spec. Top. 2023, 232, 3059–3072. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, Q.; Zhen, M.; Liu, H. “Dynamics and Design of Space Nets for Orbital Capture”; Springer-Verlag GmbH: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Mankala, K.K.; Agrawal, S.K. Dynamic modeling and simulation of satellite tethered systems. J. Vib. Acoust. 2005, 127, 144–156. [Google Scholar] [CrossRef]
- Gao, S.; Yin, Y.; Sun, X.; Sun, Y. Dynamic simulation of fishing net based on cubic B-spline surface. Commun. Comput. Inf. Sci. 2012, 325, 141–148. [Google Scholar] [CrossRef]
- Benvenuto, R.; Lavagna, M.; Salvi, S. Multibody dynamics driving GNC and system design in tethered nets for active debris removal. Adv. Space Res. 2016, 58, 45–63. [Google Scholar] [CrossRef]
- Benvenuto, R.; Salvi, S.; Lavagna, M. Dynamics analysis and GNC design of flexible systems for space debris active removal. Acta Astronaut. 2015, 110, 247–265. [Google Scholar] [CrossRef]
- Botta, E.M.; Sharf, I.; Misra, A.K. Energy and momentum analysis of the deployment dynamics of nets in space. Acta Astronaut. 2017, 140, 554–564. [Google Scholar] [CrossRef]
- Botta, E.M. Deployment and Capture Dynamics of Tether-Nets for Active Space Debris Removal. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 2018. [Google Scholar]
- Liu, L.; Shan, J.; Ren, Y.; Zhou, Z. Deployment dynamics of throw-net for active debris removal. In Proceedings of the 65th International Astronautical Congress, Toronto, ON, Canada, 29 September–3 October 2014. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E. IAC-15-A6.5.7 An analysis of critical deployment parameters for tethered-net capturing for space debris removal. In Proceedings of the International Astronautical Congress, IAC, Jerusalem, Israel, 12–16 October 2015; Volume 3, pp. 2262–2267. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E.; Gołȩbiowski, W. Validation of Space Net Deployment Modeling Methods Using Parabolic Flight Experiment. J. Guid. Control. Dyn. 2017, 40, 3319–3327. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Contact Dynamics on Net Capturing of Tumbling Space Debris. J. Guid. Control Dyn. 2018, 41, 2063–2072. [Google Scholar] [CrossRef]
- Shan, M. Net Deployment and Contact Dynamics of Capturing Space Debris Objects. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar] [CrossRef]
- Salvi, S. Flexible Devices for Active Space Debris Removal: The Net Simulation Tool. Master’s Thesis, Politecnico Di Milano, Milan, Italy, 2014. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E. Deployment dynamics of tethered-net for space debris removal. Acta Astronaut. 2017, 132, 293–302. [Google Scholar] [CrossRef]
- Cuadrat-Grzybowski, M. Risks of Secondary Space Debris Generation from Net Capturing in Active Space Debris Removal Missions. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2023. [Google Scholar]
- Gao, Q.; Zhang, Q.; Feng, Z.; Tang, Q. Study on launch scheme of space-net capturing system. PLoS ONE 2017, 12, e0183770. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Gao, Q.; Feng, Z.; Tang, Q.; Zhang, G. Design and optimization of a space net capture system based on a multi-objective evolutionary algorithm. Acta Astronaut. 2020, 167, 286–295. [Google Scholar] [CrossRef]
- Gilardi, G.; Sharf, I. Literature survey of contact dynamics modelling. Mech. Mach. Theory 2002, 37, 1213–1239. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Contact Dynamic Models of Space Debris Capturing Using A Net. Acta Astronaut. 2017, 158, 198–205. [Google Scholar] [CrossRef]
- Si, J.; Pang, Z.; Du, Z.; Cheng, C. Dynamics modeling and simulation of self-collision of tether-net for space debris removal. Adv. Space Res. 2019, 64, 1675–1687. [Google Scholar] [CrossRef]
- Clohessy, W.H.; Wiltshire, R.S. Terminal Guidance System for Satellite Rendezvous. J. Aerosp. Sci. 1960, 27, 653–658. [Google Scholar] [CrossRef]
- Allard, C.; Schaub, H.; Piggott, S. General hinged rigid-body dynamics approximating first-order spacecraft solar panel flexing. J. Spacecr. Rocket. 2018, 55, 1290–1298. [Google Scholar] [CrossRef]
- Lacoursière, C. A Regularized Time Stepper for Multibody Systems; Department of Computing Science, Umeaa University: Umeå, Sweden, 2006. [Google Scholar]
- Shan, M.; Shi, L. Post-capture control of a tumbling space debris via tether tension. Acta Astronaut. 2021, 180, 317–327. [Google Scholar] [CrossRef]
- ASAR Overview—Envisat Instruments, ESA. Available online: https://earth.esa.int/eogateway/instruments/asar/description (accessed on 20 March 2023).
- Serrano, J.; SanMillan, J.; Santiago, R. Antenna pointing mechanism for ESA ENVISAT polar platform. In Proceedings of the 30th Aerospace Mechanisms Symposium, Hampton, VA, USA, 15–17 May 1996. [Google Scholar]
- Wuxi Huaxin Radar Engineering CO., Ltd. HUAXIN ANTENNA|Products|Vehicle-Mounted Antenna. Available online: https://www.hxantenna.com/Home.html (accessed on 15 April 2023).
- Titanium Ti-6Al-4V—ASM Material Data Sheet. Available online: https://asm.matweb.com/search/SpecificMaterial.asp?bassnum=mtp641 (accessed on 10 September 2023).
- Mirdehghan, S.A. Fibrous Polymeric Composites; Woodhead Publishing: Sawston, UK, 2021; pp. 1–58. [Google Scholar] [CrossRef]
- Mas-Albaiges, J.; Huertas, L. Communicating with the Polar Platform/Envisat—The DRS Terminal. ESA Bull. 1996, 88, 58–65. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Input | Value |
|---|---|
| Net mesh size | m |
| Net size | m |
| Average thread stiffness | 62,308.25 N/m |
| Average thread damping | N/(m/s) |
| Bullet mass | kg |
| Impact velocity | 20 m/s |
| Simulation Input | Value |
|---|---|
| Mock-up Envisat reduction factor | |
| Thread radius | 1 mm |
| Bullet radius | 1 cm [15] |
| Static friction coefficient | [10] |
| Dynamic friction coefficient | [10] |
| Material constant | [10,15] |
| Contact stiffness | N/m1.5 |
| Hunt–Crossley damping constant | [10] |
| Maximum penetration | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuadrat-Grzybowski, M.; Gill, E. Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions. Aerospace 2024, 11, 236. https://doi.org/10.3390/aerospace11030236
Cuadrat-Grzybowski M, Gill E. Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions. Aerospace. 2024; 11(3):236. https://doi.org/10.3390/aerospace11030236
Chicago/Turabian StyleCuadrat-Grzybowski, Michal, and Eberhard Gill. 2024. "Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions" Aerospace 11, no. 3: 236. https://doi.org/10.3390/aerospace11030236
APA StyleCuadrat-Grzybowski, M., & Gill, E. (2024). Generation of Secondary Space Debris Risks from Net Capturing in Active Space Debris Removal Missions. Aerospace, 11(3), 236. https://doi.org/10.3390/aerospace11030236