2. Kinematic Modeling of Three-Axis SOTM Antenna
The three-axis SOTM antenna structure under study in this paper is illustrated in
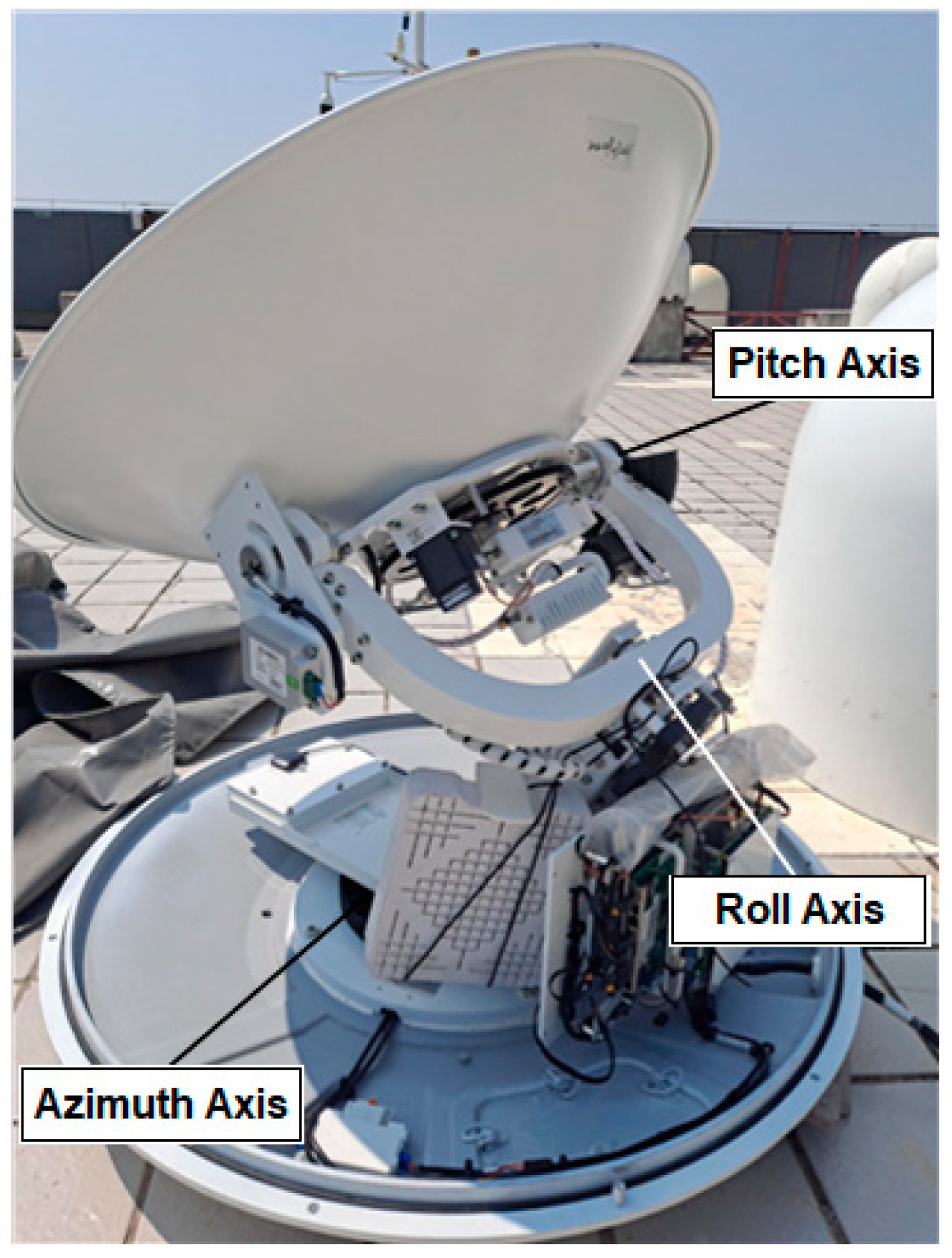
Figure 1. The entire system is installed on a fixed base, which is firmly attached to the carrier. Typically, bearings are employed to drive the base unit for rotational movement and mechanical linkage.
Figure 2 displays a physical image of a three-axis SOTM antenna manufactured by SATPRO M&C Tech Co., Ltd. (located in Xi’an, China). The three-axis antenna system includes an azimuth sub-system, a roll sub-system and a pitch sub-system. Each of the three sub-systems has a rotating axis, which is used to adjust the antenna attitude, isolate the carrier disturbance and keep the antenna stable. Due to the limitation of the mechanical structure of the SOTM system, there is an angle less than 90° between the roll axis and the system base (generally 30°–35°) [
23]. Brushless DC motors are usually used to drive the movement of each axis through gears or belt drives. The antenna used to transmit and receive satellite signals is installed on the pitch sub-system and moves with the pitch axis. The system uses a high-gain antenna to achieve wideband multimedia satellite communication. When the SOTM antenna tracking satellite error exceeds a certain range, it may interfere with adjacent satellites, causing the antenna to fail to transmit radio frequency signals. Therefore, the antenna pointing fluctuation must be kept within a sufficiently small range [
24]. When measuring the antenna direction, a sensing system with sufficiently high precision and high sampling rate must be selected to quickly and accurately feed location and attitude information to the controller. The controller adjusts the antenna attitude by driving the motor, thereby ensuring that the antenna always points to the target satellite [
25]. During continuous communication with the satellite, the servo system needs to continuously calculate the rotation angles of the three motors.
The three-axis SOTM antenna structure has three rotating axes, namely the azimuth axis, the pitch axis and the roll axis. In this section, we introduce an NMDH method based on the modified DH method [
26,
27,
28,
29] to establish the kinematic model of the three-axis SOTM antenna.
Based on the mechanical structure of the three-axis SOTM antenna, the antenna coordinate system configuration is obtained as shown in
Figure 3. Among them, the coordinate system 0 is the reference coordinate system, which is firmly attached to the base. When the rotation angle of the azimuth axis is 0, the coordinate system 1 coincides with the reference coordinate system, the z-axis of the reference coordinate system coincides with the axis of the azimuth axis and
represents the azimuth axis. Beta is the fixed angle between the roll axis and the base. The existence of this angle can improve the rigidity of the mechanical structure to improve the mechanical performance of the antenna, but it will increase the difficulty of modeling the antenna kinematic model. Since beta (
) is a fixed angle, it is difficult to directly use the modified DH method for system modeling. For this reason, a virtual coordinate system 2 is added in the coordinate system shown in
Figure 3. In addition, due to the spatial relationship characteristics between
and
,
and
in
Figure 3, the correct link length cannot be obtained along
and
respectively. Therefore, auxiliary coordinate system 3 and 5 are added in
Figure 3 respectively. In
Figure 3, the origins of the virtual coordinate system 2 and the auxiliary coordinate system 3 coincide, and the auxiliary coordinate system 5 and the origins of the coordinate system 6 coincide. In order to make
Figure 3 clear,
and
are set in the figure to represent the two groups of coincident coordinate systems. Coordinate systems 4 and 6 represent the roll and pitch axes, with
and
denoting the rotation axes of the roll and pitch axes, respectively. This paper refers to the above method as the NMDH method.
Aiming at the global coordinate system configuration of the three-axis SOTM antenna mechanical structure shown in
Figure 3, the D-H table of the three-axis SOTM antenna mechanical structure kinematic model is shown in
Table 1.
According to the link parameters shown in the D-H table of the three-axis SOTM antenna system, the transformation matrices between each link
are obtained as follows:
The total transformation matrix between the reference coordinate system 0 and the end pitch axis coordinate system 6 in the three-axis antenna system can be obtained from the above equations, then the forward kinematics model is calculated as follows:
Let
,
,
,
. Then,
where
,
,
,
,
,
,
,
,
,
,
,
,
is the direction matrix pointing the antenna towards the target satellite.
Next, the inverse kinematics solution of the three-axis SOTM antenna will be obtained, so as to obtain the real-time rotation angles of the azimuth axis, pitch axis and roll axis during the operation of the three-axis SOTM antenna.
in Equation (7) can be calculated by the following equation:
where
represents the rotation matrix from coordinate system
to coordinate system
.
The inverse kinematics solution of the three-axis SOTM antenna contains the following two cases:
(1) During the process of pointing the antenna towards the satellite in SOTM, the entire hemisphere can be scanned using azimuth and pitch axes. When the pitch angle of the tracking antenna is not 90°, the roll axis is fixed and is set to 0.
The inverse kinematic solution for the azimuth angle
is obtained as:
The inverse kinematic solution for the pitch angle
is:
or
Since the pitch angle must be between [0°, 90°], therefore should be within the range of [0°, 90°].
(2) When the pitch angle of the SOTM antenna reaches 90°, the antenna is in a locked state, and changing the azimuth axis cannot change the system’s orientation. In this case, the roll axis needs to be used, with the azimuth axis in a fixed state and is taken as the angle at which the antenna was last operated before entering the locked state; at this point, is known.
The inverse kinematic solution for the roll angle
is obtained as:
According to Equation (12), it can be obtained that:
The inverse kinematic solution for the pitch angle
is:
According to Equation (14), it can be obtained that:
3. Modified ADRC Servo Control Design
Currently, PID control is widely used in the servo control of SOTM antennas. After long-term development, the advantages of PID control, which are widely applicable and easy to design, have been widely recognized. PID control does not require an exact mathematical model of the controlled object; adjusting only three tunable parameters—the proportional constant, integral constant and differential constant, it can achieve good control effects and performance in most applications. However, PID control has some inherent disadvantages: it relies on an error-based design concept to eliminate errors, creating a certain time delay between system control action and disturbances. To swiftly suppress errors, higher control efforts are necessary, increasing the likelihood of overshoot, or even significant overshoot; when solely using the proportional part for control, the system may exhibit steady-state error. To eliminate this steady-state error, the integral element is introduced, but it may cause phase lag in the system and the integral element cannot effectively suppress specific disturbances. The mathematical model of the differential element is non-regular, making it a non-causal system that cannot be directly implemented. In digital PID controllers, the differential element is often replaced with a difference element, which reduces the efficiency of the differential element and subsequently affects the control effects of the PID controller. While combining PID and feedforward control can enhance the disturbance rejection capability of the controller, it is generally effective only for specific disturbances and necessitates a highly accurate system model, limiting its practical engineering applications.
A common scheme for servo control is to adopt a multi-loop design. The loops typically selected include the position loop, current loop, speed loop and others. For example, reference [
30] proposed a design concept and method of adding an RC filtering network in the innermost loop to suppress high-frequency noise based on a multi-closed-loop design scheme. Each loop is designed using the PI control method, but the system’s uncertainties and nonlinearities were not considered. Building upon this foundation, reference [
31,
32] considered the nonlinear characteristics of the SOTM antenna system and introduced sliding mode control to enhance the stability of the control system and reduce steady-state errors based on the multi-loop control design concept. This method requires high modeling accuracy for the object and is unable to simultaneously meet the requirements of rapidity and overshoot. References [
33,
34] proposed a design scheme combining feedback control structure with feedforward control. By predicting the trend of system disturbances and providing feedforward compensation, it partially overcomes the shortcomings of traditional PID controllers in suppressing system disturbances. However, the premise is that the disturbances and the system model are known, so the disturbance rejection effect of feedforward control is not significant in complex disturbance environments. Reference [
35] introduced feedback linearization methods and nonlinear system switching systems methods from modern control theory to enhance the robust stability of the control system. This method involves complex system design and requires high modeling accuracy. The aforementioned approaches cannot guarantee stable satellite communication in SOTM antenna system. Therefore, in the engineering field, PID control remains the mainstream design scheme for SOTM antenna servo control. However, there is the contradiction between rapidity and overshoot in PID control, and it does not address disturbances specifically but passively eliminates errors based on error. Therefore, using PID control SOTM antenna servo control systems cannot fully harness the efficiency of SOTM antenna systems.
For the SOTM antenna, when the aperture of parabolic antennas is small, the energy of the antenna beam relatively diverges, resulting in a wider antenna beam. Therefore, although it is easier to locate and track satellites with the small aperture of SOTM parabolic antennas, their communication quality is generally relatively poor. On the other hand, for large-aperture of parabolic antennas, due to the larger aperture size, the energy of the antenna beam is more concentrated, resulting in a narrower beam. While the narrow beam of large-aperture of SOTM parabolic antennas makes satellite acquisition and tracking more challenging, the concentrated antenna energy during steady-state satellite tracking with SOTM antennas enables large-aperture of parabolic antennas to achieve better communication quality. In the field of SOTM antenna applications, from the perspective of communication quality, if the installation size of the moving carrier allows, a system design using larger aperture antennas is generally preferred.
For larger-aperture SOTM antennas, if the SOTM antenna servo control system faces a contradiction between rapidity and overshoot, it may lead to the following issues: When the servo control system controls the antenna to quickly converge to the target direction, it may produce a large overshoot. At this point, once the SOTM antenna has aligned with the satellite, the presence of overshoot causes the antenna direction to keep adjusting, leading the antenna away from the optimal position. This deviation can result in reduced communication quality in the SOTM system and may even lead to interruptions in satellite communication if the antenna strays beyond the satellite beam coverage range. Additionally, because the carrier’s attitude and location may continuously change, the presence of the aforementioned overshoot further increases the difficulty of tracking satellites with the SOTM antenna. On the other hand, when the servo control system has a small overshoot or no overshoot, the antenna direction often requires a longer time to converge to the target direction. If the carrier’s location and altitude change little or not at all, the impact of this situation will be relatively minor. However, the SOTM system requires providing stable satellite communication services to users while the carrier is in motion. In a certain control cycle, due to the poor rapidity of the control system, when the servo control system has not yet adjusted the antenna direction to converge to the target direction, the carrier’s altitude and location may change, generating a new target direction for the SOTM antenna. This will cause the SOTM antenna to never converge to the ideal target direction, reducing the satellite communication quality of the SOTM system and even leading to interruptions in SOTM satellite communication. From the perspective of disturbance suppression, there are many sources of disturbance during the operation of the SOTM system, such as: environmental and atmospheric changes causing signal attenuation and multipath effects, changes in the motion carrier’s attitude and location and inherent vibrations, electromagnetic interference from the SOTM system itself, the moving carrier, or the surrounding environment, nonlinear characteristics introduced by gear backlash in servo transmission devices, production and installation errors between different batches of products, etc. The internal and external disturbances of the above-mentioned SOTM system generally have characteristics of being random, unpredictable and having no fixed features, making it difficult to effectively suppress these disturbances through conventional schemes.
Active Disturbance Rejection Control (ADRC) was proposed by Professor Jingqing Han of the Chinese Academy of Sciences in the 1990s, based on the principle of invariance. The core idea of ADRC is to treat the controlled object as a series integral type and to consider everything outside the series integral type object in the control system as the system’s equivalent total disturbance. By real-time estimation and elimination of this equivalent total disturbance, the control of complex controlled objects is simplified to that of a basic series integral type controlled object.
Figure 4 shows the block diagram of the ADRC structure. ADRC mainly consists of three major parts: the tracking differentiator (TD), the extended state observer (ESO) and the nonlinear state error feedback (NLSEF). The following sections will introduce these three parts of ADRC individually.
Tracking differentiator (TD):
For PID controllers, since the differential element is non-regular, an ideal differentiator is essentially physically unrealizable and can only be approximated by a differentiator with a filter or by a differencer. In the case of SOTM antenna systems, which use digital control technology, the differentiator is typically approximated by a differencer. Furthermore, due to the presence of significant random noise signals in SOTM antenna systems, random noise signals may be amplified, making the approximate differentiator unusable due to excessive deviation. Therefore, in the engineering application of SOTM antenna systems, PI controllers are commonly used. Due to the absence of the differential element, the dynamic performance of the system may be reduced. The main function of the tracking differentiator is to extract discontinuous or signal with random noise from the actual system as well as the differential of the signal. Additionally, it mitigates the contradiction between the rapidity and overshoot of the control system by arranging a transient process.
ADRC establishes an optimal synthesis function, based on which the Tracking Differentiator is designed to achieve rapid and synchronous extraction of the input signal and its differential, thereby reducing the amplification of random noise in the signal. Moreover, through the tracking differentiator, a smooth differential signal can be extracted. Simultaneously, by coordinating with the optimal synthesis function to arrange the transient process, it is possible to achieve rapid tracking of the input signal with minimal or even no overshoot.
The continuous tracking differentiator model is:
The corresponding discrete tracking differentiator model is:
In Equations (16) and (17),
is the input signal,
is the input signal extracted by the tracking differentiator, which is the tracking of the input signal,
is the extracted differential signal and
is the sampling period.
function refers to the optimal synthesis function mentioned earlier and its expression is as follows:
In the function, is the response to the tracking speed of the input signal, known as the speed factor. while filters the noise carried by the signal, known as the filtering factor. Both the speed factor and the filtering factor are adjustable parameters. It is important to note that the filtering factor in the function and the sampling period in Equation (17) are not the same variable. The sampling period is determined at the beginning of system design and does not change, while the filtering factor is an adjustable parameter that can be modified according to changes in the control objective.
In the optimal synthesis function
described by Equation (18),
is the sign function and the specific expression of the
function is shown in Equation (19):
Extended state observer (ESO):
In PID control, its ability to suppress system disturbances is relatively limited. When disturbance signals do not have specific characteristics and are unknown, PID struggles to effectively suppress all disturbances in the control system. In ADRC, the concepts of the nominal model and total disturbance are introduced. The nominal model is an expected model that deviates slightly from the system’s actual state, typically modeled as a series integral type. The difference between the actual model of the object and the desired nominal model is considered as the system’s internal disturbance, generally including inaccuracies in the model establishment and the unmodeled parts of the actual system contained within the established model. The starting point of ADRC in suppressing disturbances is to model the object as the desired nominal model, no longer distinguishing between internal and external disturbances, but rather treating them uniformly as the system’s total disturbance.
In the actual implementation process, an extended state observer was designed, which can observe the total disturbance of the system and expand it as a state to be output by the extended state observer. Leveraging the convergence of the extended state observer, it can accurately observe and extract the total disturbance of the system, making the observed total disturbance close to the true value. This design scheme does not differentiate between internal and external disturbances, reducing the complexity of disturbance analysis from a design perspective. The extended state observer is a focal point in the design of ADRC, addressing how to acquire system disturbances during the control process. It not only observes the state and the differential of state variables to differentiate from the output of the tracking differentiator, but also can expand the observed total internal and external disturbances of the system into a state. The extended state observer observes total disturbances without targeting disturbances with specific characteristics and does not require measurement through sensors to obtain a more accurate disturbance, simplifying the control system’s process of dealing with disturbances. Moreover, because the extended state observer can observe the total system disturbance in real-time accurately, appropriate compensation can be applied to enhance the system’s disturbance suppression performance significantly.
The continuous nonlinear extended state observer model is:
The corresponding discrete nonlinear extended state observer model is:
Wherein
is the estimated value of the system state observed by the extended state observer,
is the estimated value of the differential of the system state observed by the extended state observer,
is the total disturbance of the system observed by the extended state observer,
is the sampling period of the discrete system. In Equations (20) and (21),
,
,
and
are adjustable parameters of the controller. The specific mathematical description of the conventional
function is:
Nonlinear state error feedback (NLSEF):
In PID control, the proportional, integral and differential elements are linearly weighted and summed. Studies show that this is not an efficient method for designing control systems. ADRC adopts a nonlinear feedback scheme and practical applications have shown that, compared to linear feedback, nonlinear feedback can enhance the control precision of the system and the feedback coefficients exhibit stronger adaptability.
In PID control, the integral term is used to eliminate steady-state error and suppress the adverse effects of disturbances on the system. When the system is subject to constant or persistent disturbances, the integral element can accumulate and gradually eliminate the resulting errors, ensuring that the system’s output can gradually return to the set point. This means that the integral element helps the control system better cope with persistent interference, thereby improving the system’s stability and robustness. However, in ADRC, because of the presence of the extended state observer, the total disturbance of the system can be estimated and the system can compensate for the adverse effects of the total disturbance. Therefore, in ADRC, the integration of the error signal is usually not used and only the error signal and its differential are needed. By using the input signal and its differential extracted by the tracking differentiator and the estimated values of the system’s state variables and their differential obtained through the extended state observer, the error signal and its differential can be obtained by taking the difference.
Nonlinear state error feedback generally has two forms of expression, one of which is:
Another form of expression is:
In Equations (23) and (24), is the error signal, is the differential of the error signal and , , , , , and are adjustable parameters of the controller.
In ADRC, the performance of the extended state observer significantly impacts the control effect of the control system. The control system needs to compensate for the total disturbance, which is observed and estimated by the extended state observer. The
function, derived from engineering practice through fitting, does not have a unique form. In ADRC, the
function is a continuous function, but it has non-differentiable points, namely at
and
in Equation (22), where the left and right derivatives of the
function are not equal. These points are cusp points, indicating that it is a continuous but non-smooth function. Studies have shown that the continuous smoothness of the
function significantly affects the control effect of ADRC [
36]. Thus, the
function may adversely affect the control system, there is a need to develop a new
function [
37,
38,
39]. Therefore, this paper introduces a new
function as presented in Equation (25):
where
In this paper, the
function described by Equation (25) is referred to as the improved
function, whereas the ADRC based on this improved
function is referred to as the modified ADRC. Next, we verify whether the improved
function is a smooth continuous function. Firstly, we verify its continuity, taking the point
as an example for analysis. Let
,
, then:
The following can be obtained:
This implies that the improved function is continuous at the point . Using the same method, it can be concluded that the improved function is also continuous at the point .
Secondly, we verify the smoothness of the improved
function, primarily by checking whether the left and right derivatives of the
function at points
and
are equal.
Given that the left and right derivatives of the improved function are equal at , it indicates that the improved function is smooth at . Applying the same method, it is possible to deduce that the improved function is also smooth at .
Summarizing the above process, the improved function is a smooth and continuous function at both and .
Next, we verify the symmetry of the improved function.
When
, it can be easily derived,
In summary, the improved function is centrosymmetric about the origin.
As shown in
Figure 5, it is a comparison of the curves between the conventional
function and the improved
function. In the figure, taking
, it can be observed that at two separate points
and
, the conventional
function is continuous but not smooth, whereas the improved
function is both continuous and smooth. Furthermore, both the conventional
function and the improved
function are symmetric about the origin, which is consistent with the theoretical deductions previously discussed.
Although the improved function is a smooth and continuous function, it is much more complex than the conventional function when , including nonlinear elements such as trigonometric functions. Likewise, when , the improved function involves nonlinear elements such as exponential calculations. The equation for the improved function is known and from a mathematical standpoint, its implementation is relatively straightforward and does not require further discussion. However, from the perspective of implementation in SOTM systems, due to the presence of the aforementioned complex calculations, microprocessors need to perform repeated floating-point multiplications, divisions and other operations when processing these calculations, which typically require more clock cycles to complete, consuming more computing resources and time. Especially for low-cost, low-power microprocessors, this requires more computational resources and time. Although the performance of microprocessors has improved, enabling high-end microprocessors to feature specialized hardware or instruction sets optimized for these complex calculations to enhance performance and computational efficiency. For most microprocessors, exponential and trigonometric calculations require substantial computing resources and time, presenting a significant challenge for microprocessors serving as controllers. Based on this, this paper proposes a piecewise linearization method for the improved function by approximating segmented straight lines to simplify calculations, thereby reducing the processing difficulty for microprocessors, enhancing their computational efficiency and decreasing the consumption of computational resources and time on the microprocessor.
A schematic diagram of the piecewise linearization method for the improved
function is shown in
Figure 6. It should be noted that the method of selecting points described in this paper is not the only one. It can be adjusted according to different parameters of the improved
function and verified by experiments or simulations.
Figure 6 provides only one example. In
Figure 6, several points, namely
,
,
,
, are selected on the curve of the
function, with line segments
,
,
,
connecting two adjacent points. Since the coordinates of points
,
,
,
are known, the equations for line segments
,
,
,
can be easily obtained:
From
Figure 6, it can be seen that the line formed by connecting segments
,
,
,
closely approximates the curve of the improved
function. For the aforementioned piecewise linearization method, it is sufficient to store the parameters of each line and the coordinates of each point locally in the microprocessor to easily compute the improved
function. Since the expression for each segment is a linear function, it can be calculated quickly and efficiently to obtain the value of the improved
function by microprocessors with hardware floating-point capabilities. This method consumes less computing resources and time for microprocessors. Additionally, as mentioned earlier, since the improved
function is symmetrical about the origin, it is only necessary to select points and connect them with line segments either after or before the
point of the improved
function. The other half can be easily obtained by utilizing the central symmetry property of the improved
function, which can reduce the consumption of the microprocessor’s local storage resources to some extent.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}