
Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security


Abstract
:1. Introduction
- (1)
- A UAV-assisted communication scheme was studied, which combines the average transmit power, the peak transmit power, path planning, and both the uplink and downlink secure EE;
- (2)
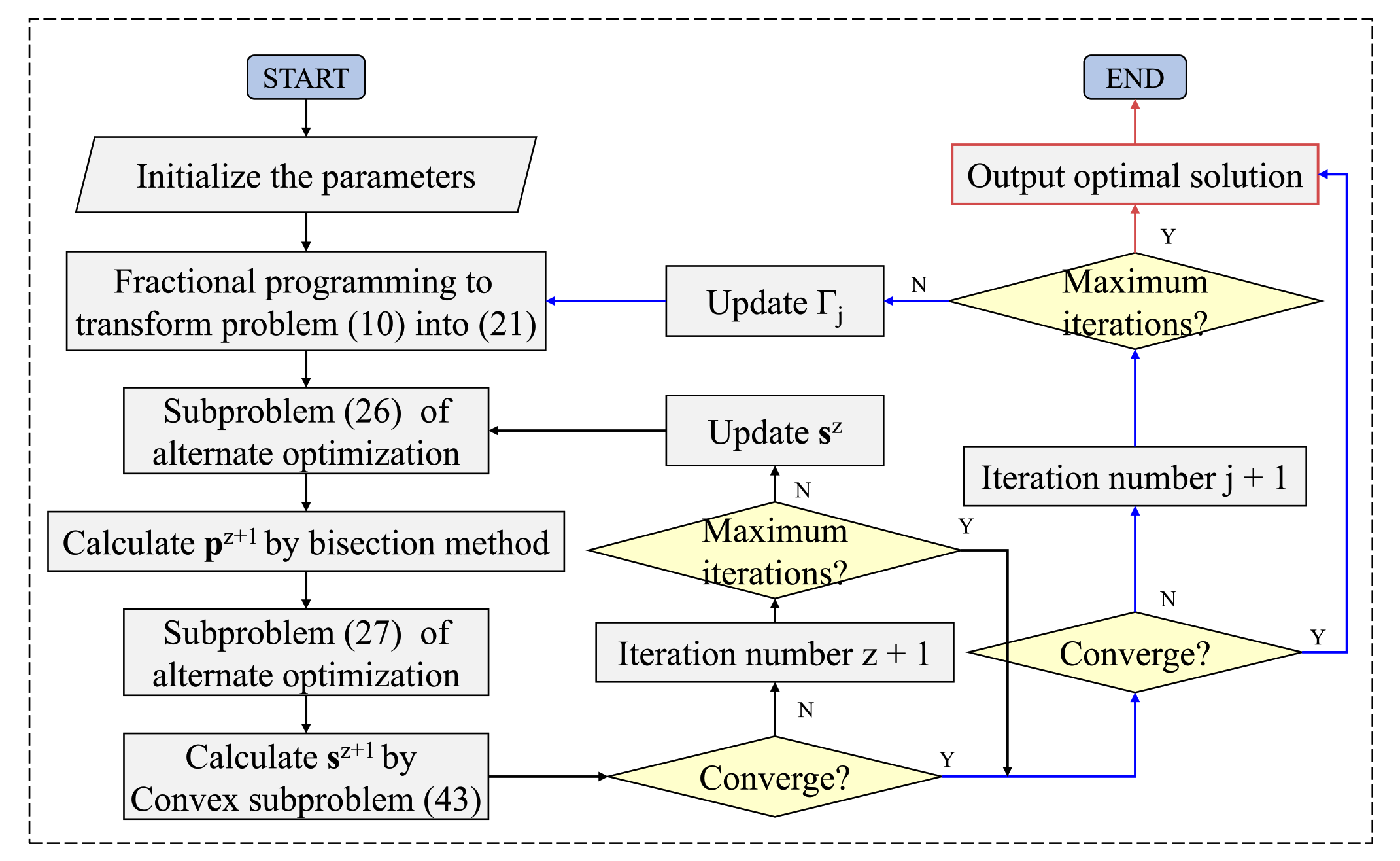
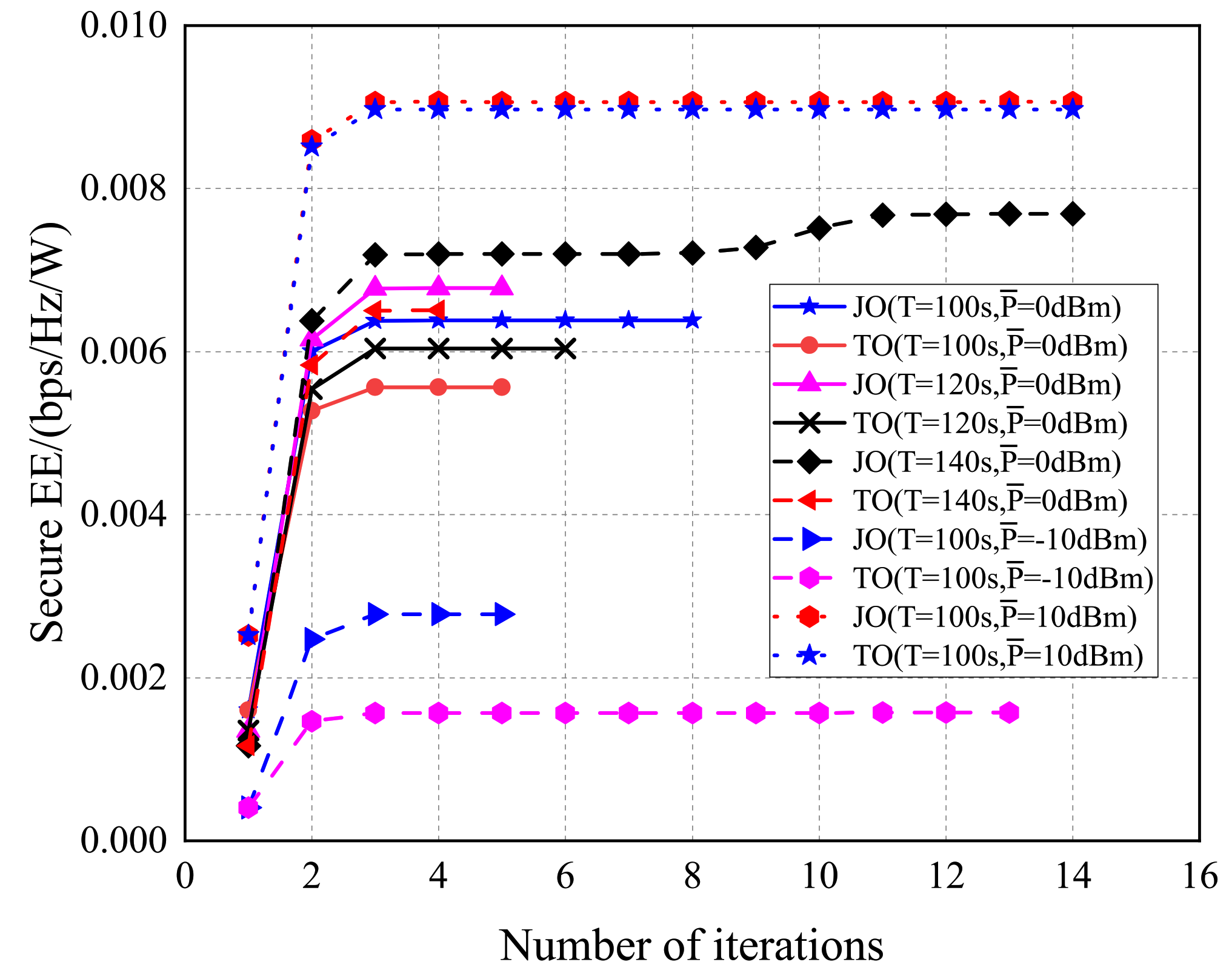
- Due to the optimization problems and constraints having strong coupling and non-convexity, a composite solution of joint fractional programming, alternate optimization, the bisection method, and the interior point method is proposed to solve the problem, which can quickly obtain the optimal trajectory and transmit power;
- (3)
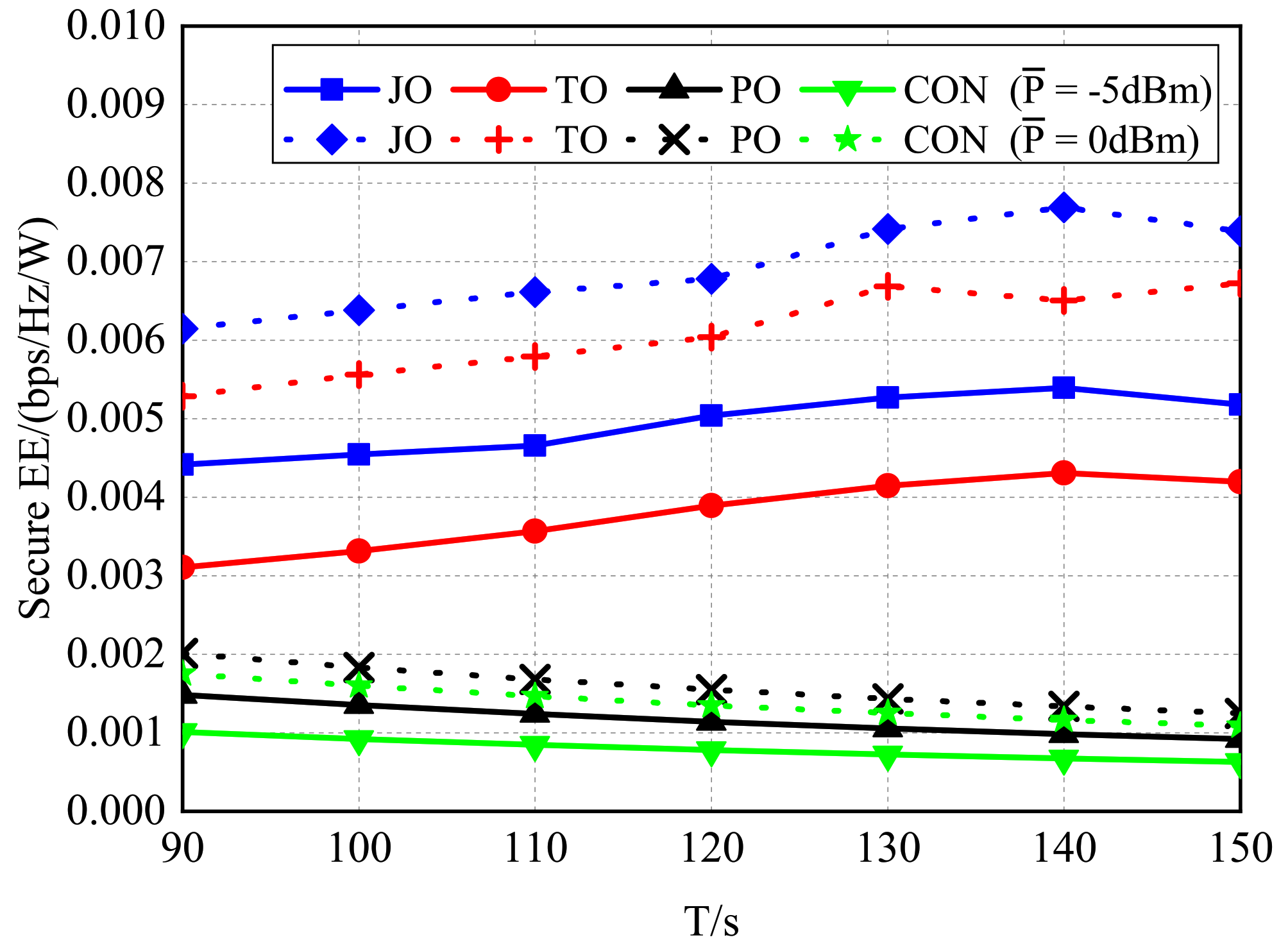
- The variation trend of secure EE affected by the average power and flight time was analyzed. Generally, secure EE improves with the increase of the average transmit power in the downlink and converges to a stable value as the flight time increases;
- (4)
- Compared with the comparable benchmarks, the proposed scheme achieved a higher secure EE. In the downlink communication, the secure EE was improved at least 12%, which is four-times that of the worst benchmark scheme. For uplink channels, the secure EE improved by at least 13%, which is two-times that of the worst benchmark.
2. System Model and Problem Formulation
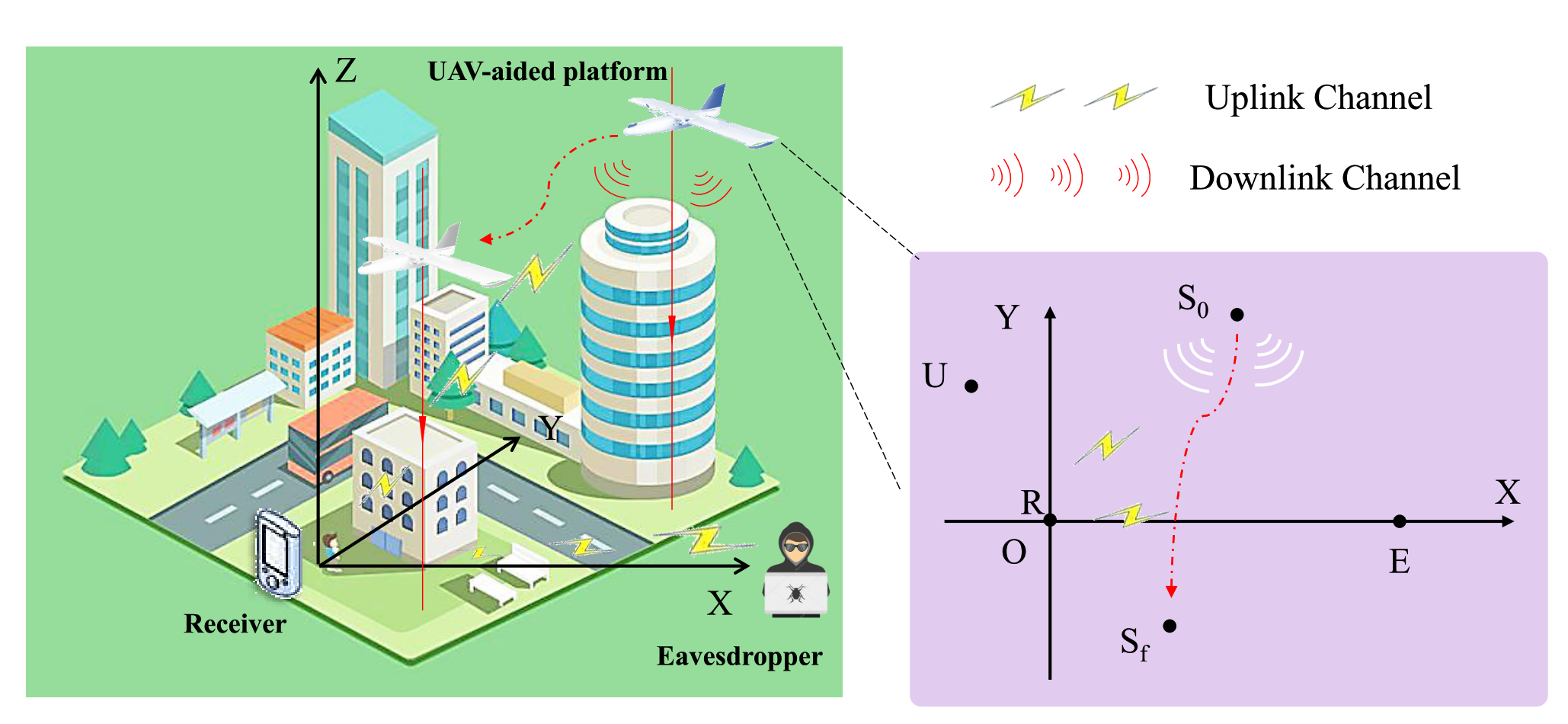
2.1. Downlink Scenario
2.1.1. System Model
2.1.2. Energy Model
2.1.3. Optimization Problem Formulation
2.2. Uplink Scenario
2.2.1. System Model
2.2.2. Optimization Problem Formulation
- (1)
- The transmit sources of downlink and uplink scenarios are different, as the former is the UAV, while the latter is the ground station;
- (2)
- The channels from the transmit sources to the eavesdropper of the two scenarios are distinct. Explicitly, the two channels are respectively air-to-ground communication and ground-to-ground communication.
3. Secure EE Maximization
3.1. Fractional Programming
| Algorithm 1: Fractional programming algorithm. |
3.2. Alternate Optimization
| Algorithm 2: Alternate optimization algorithm. |
|
3.3. Bisection Method
3.4. Convex Approximation
3.5. Computational Complexity Analysis
4. Simulation Results and Performance Analysis
4.1. Downlink Performances of PO/JO/TO/CON
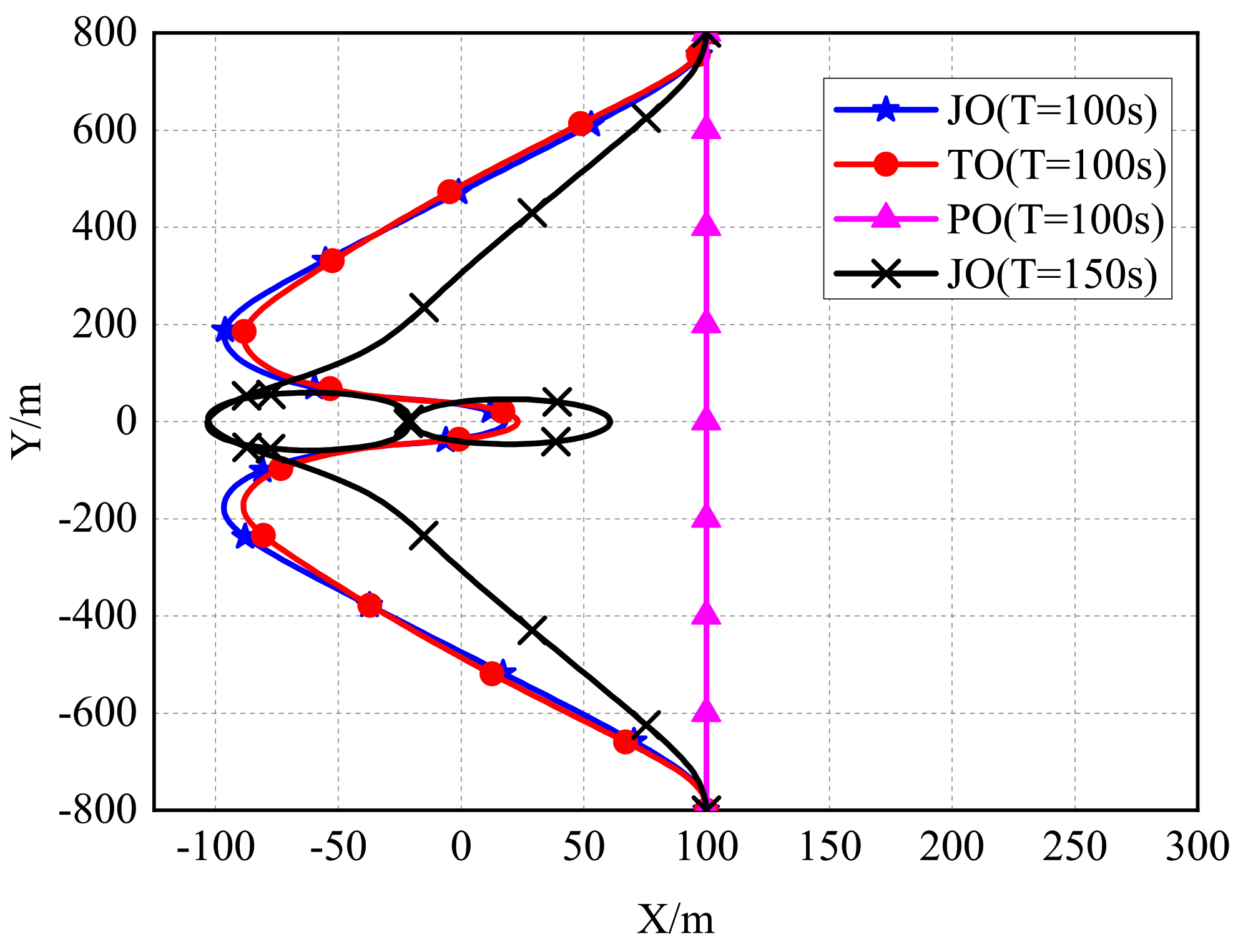
4.1.1. Trajectory Comparison of PO/JO/TO
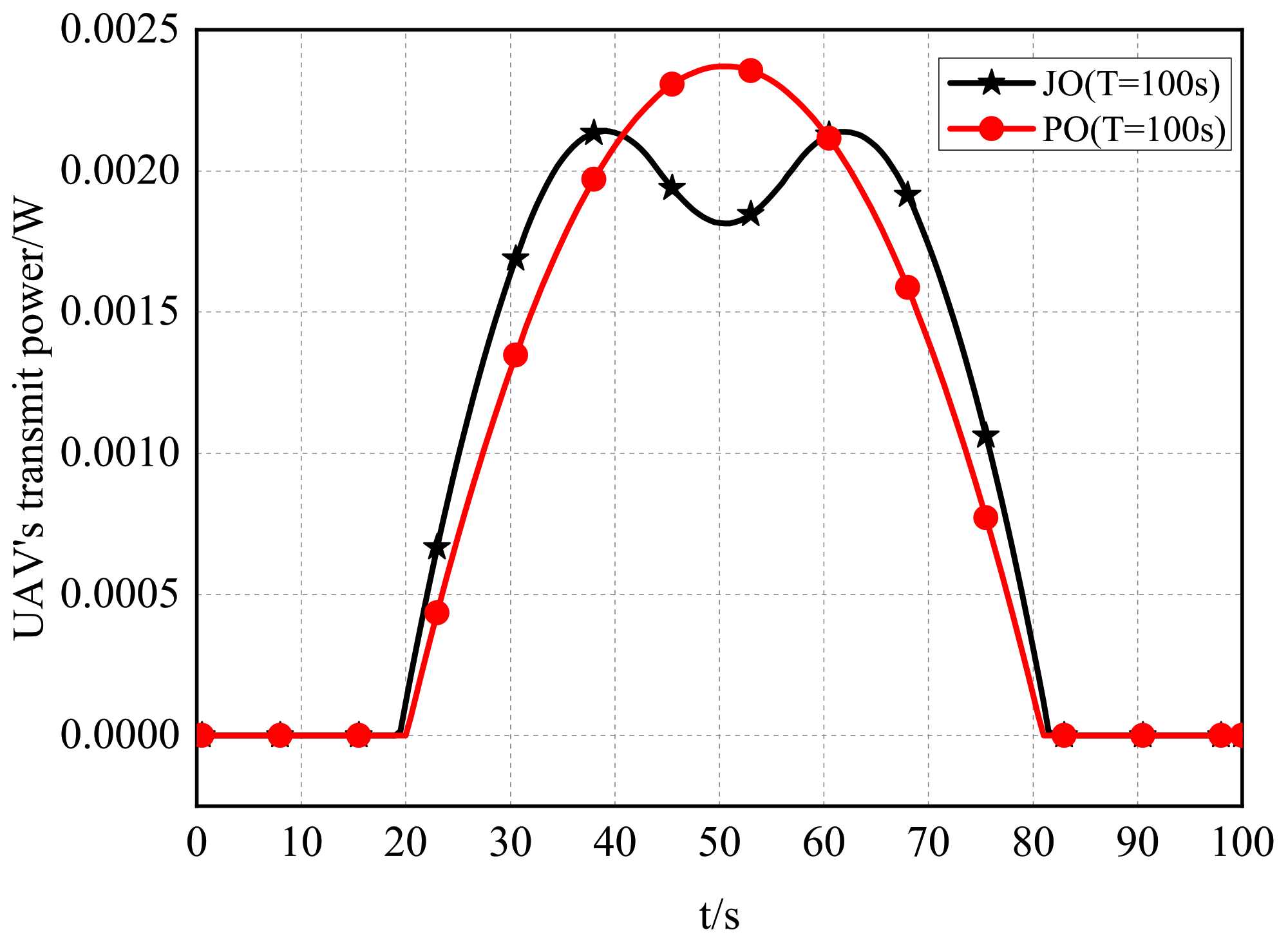
4.1.2. Comparison of the Transmit Power of PO/JO
4.1.3. Comparison of the Secure EE of PO/JO/TO/CON with Various Flight Times
4.1.4. Comparison of the Secure EE of PO/JO/TO/CON with Different Average Transmit Powers
4.2. Uplink Performance of PO/JO/TO/CON
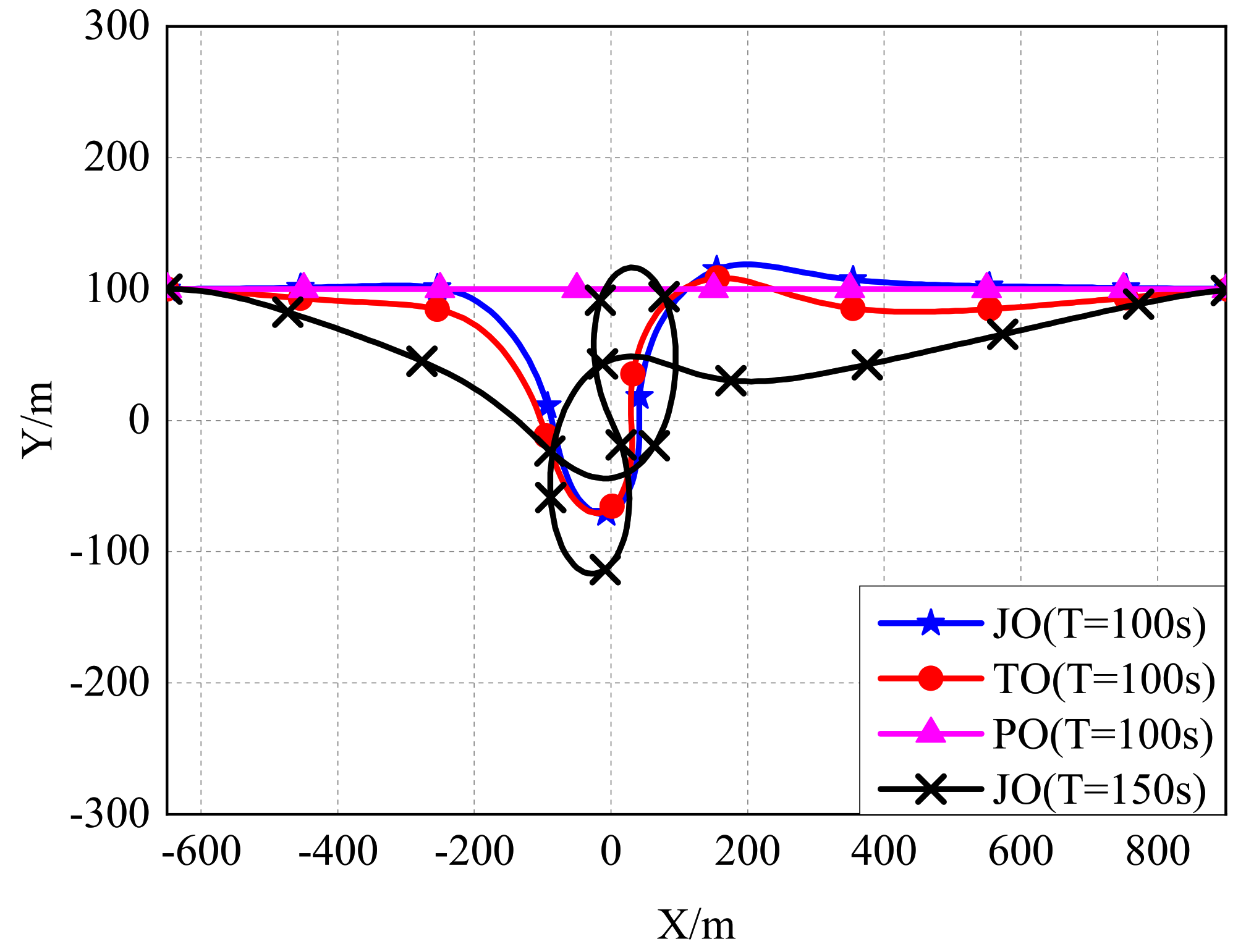
4.2.1. Trajectories of PO/JO/TO
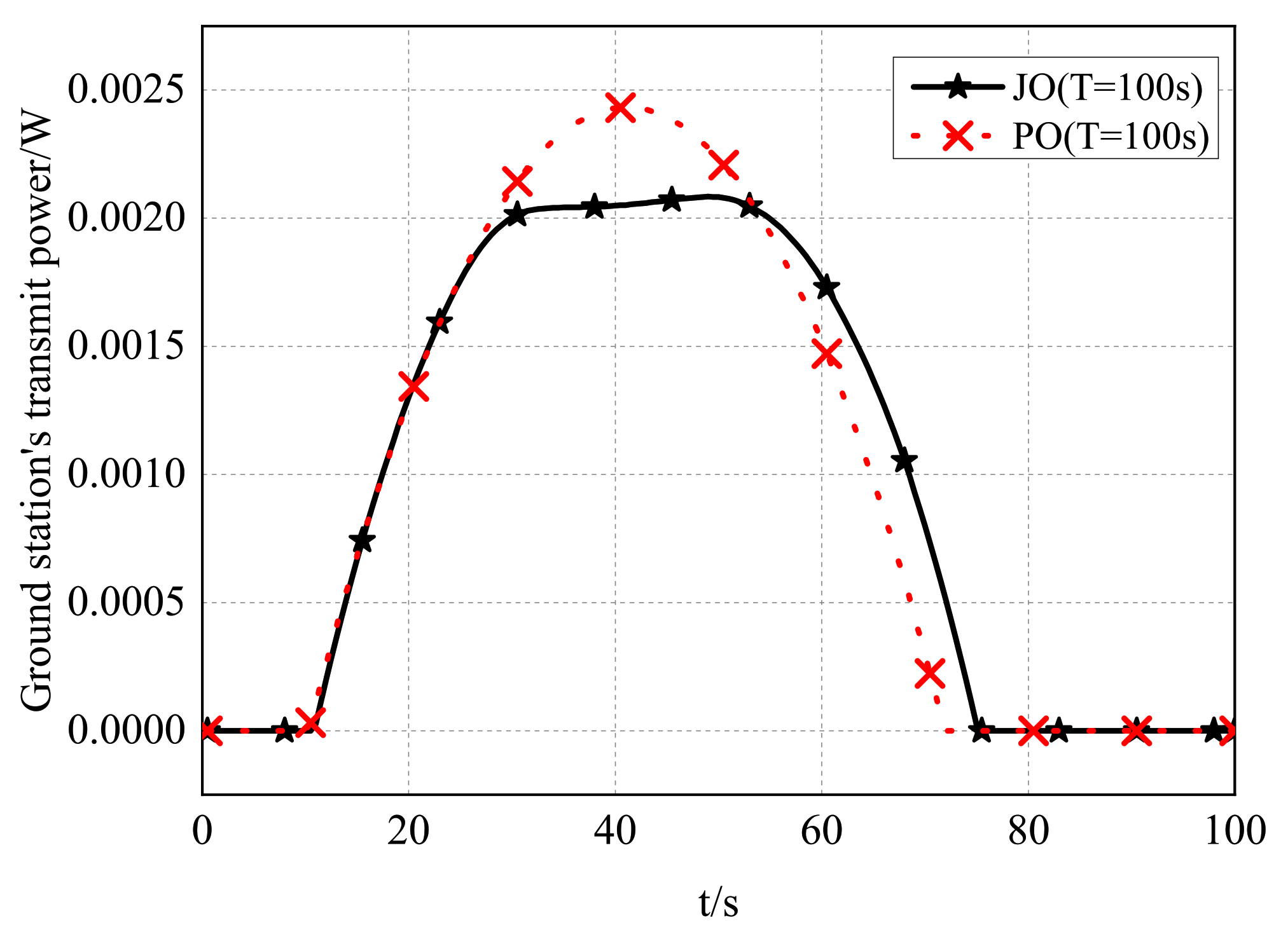
4.2.2. Transmit Powers of PO/JO
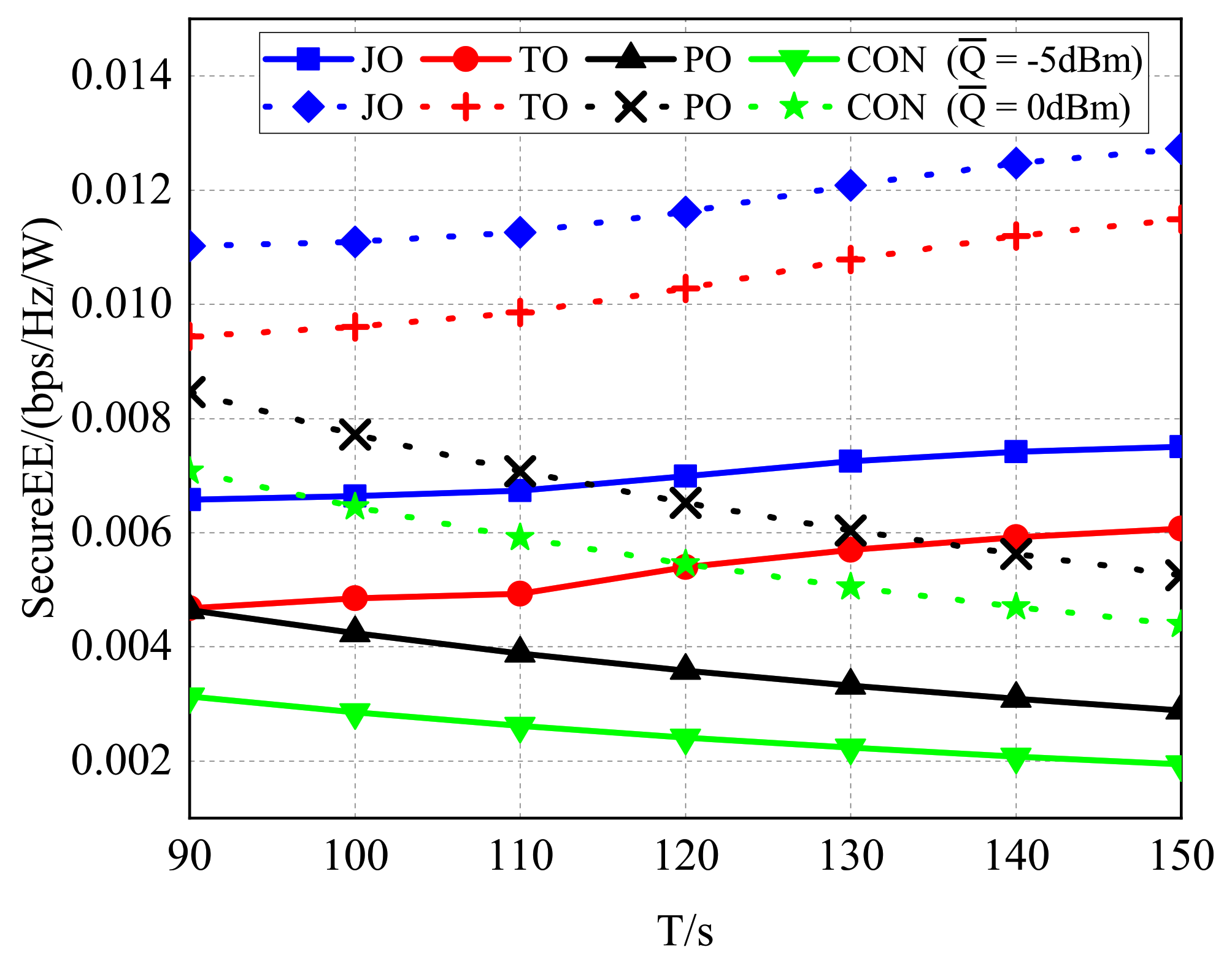
4.2.3. Comparison of the Secure EE of PO/JO/TO/CON with Various Flight Times


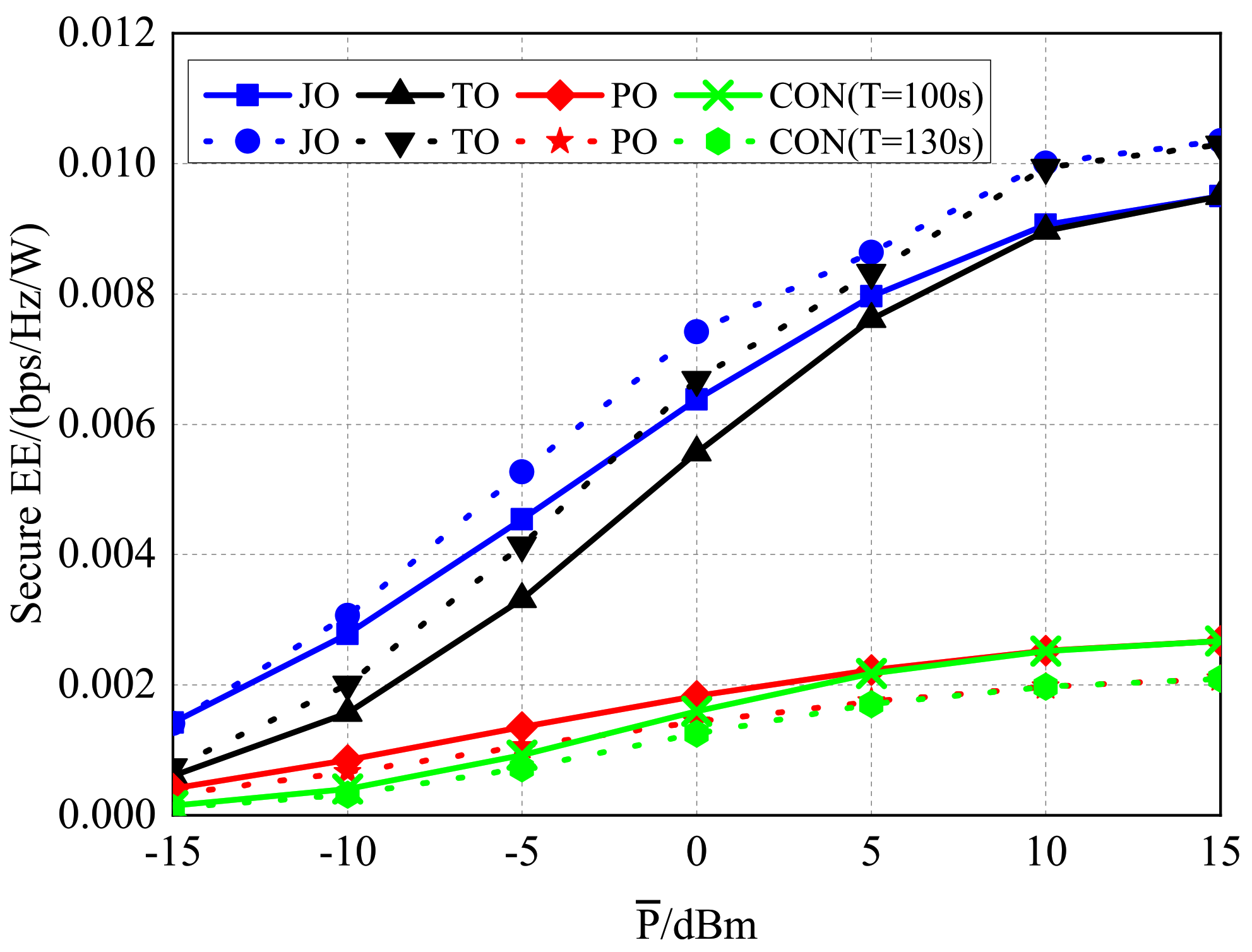
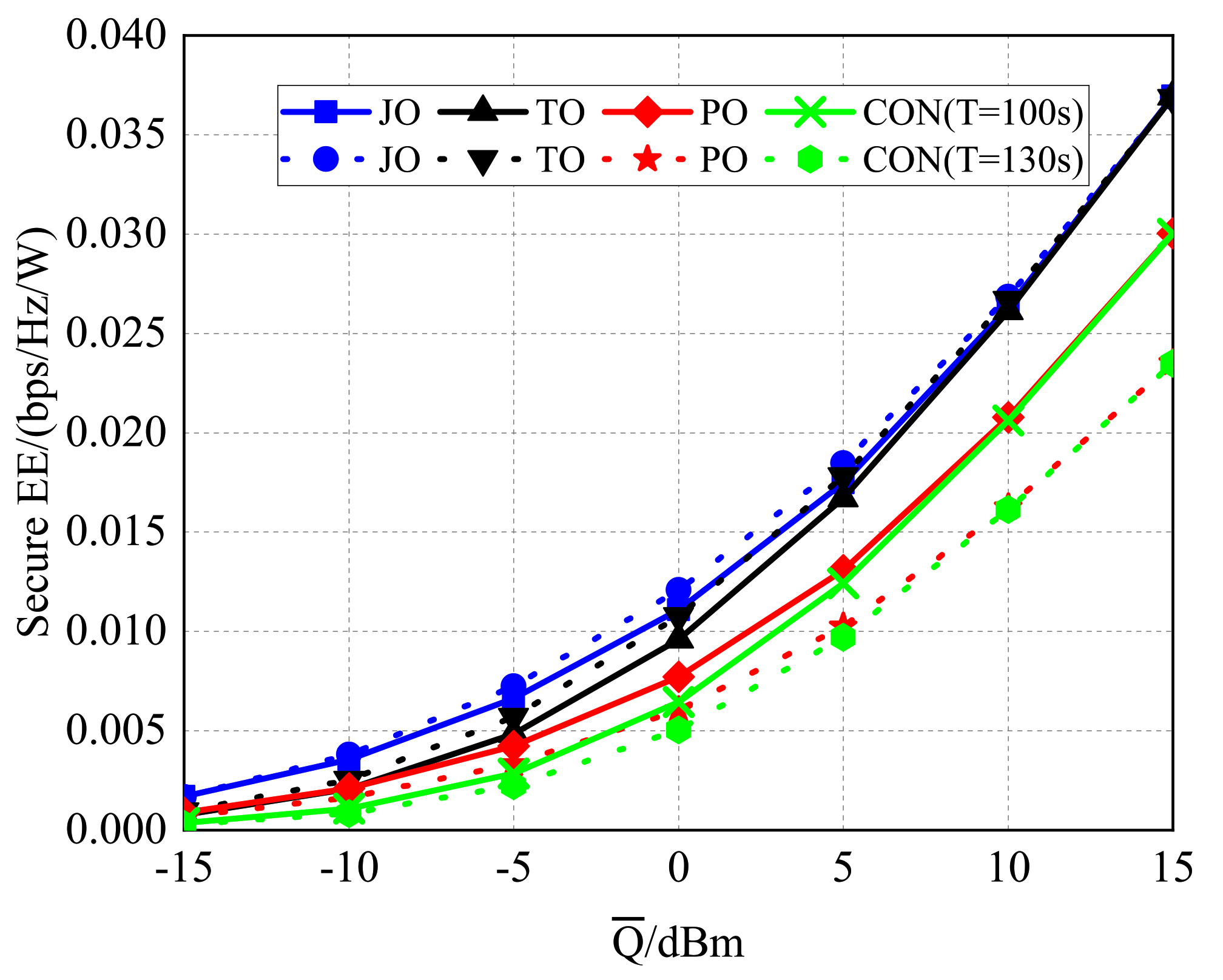
4.2.4. Comparison of the Secure EE of PO/JO/TO/CON with Different Average Transmit Powers
5. Conclusions
- (1)
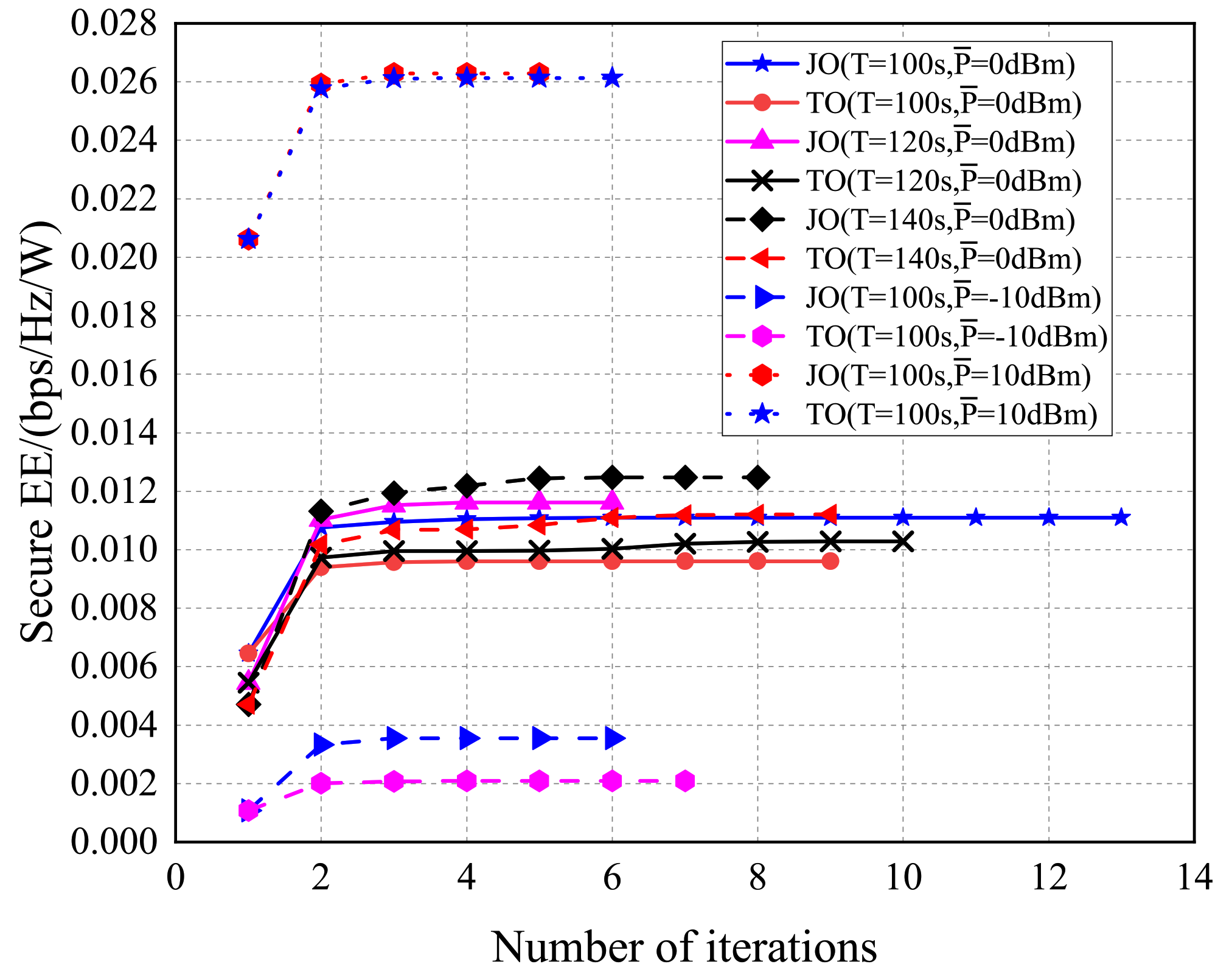
- As for the original non-convex problems, the design scheme was feasible to solve both the downlink and uplink problems effectively, which could obtain the optimal solution quickly;
- (2)
- The proposed scheme achieved a higher secure EE, with a downlink channel increase of at least 12% and at least 13% in the uplink channels when T = 120 s and = 0 dBm, which were several times better than the worst benchmarks;
- (3)
- In downlink, the secure EE of the proposed scheme increased with the increase of the flight time and average transmit power, which converged to a stable value. However, in uplink, the secure EE also grew with the increase of the flight time and average transmit power, while it increased rapidly with the improvement of the average transmit power;
- (4)
- The overall computational complexity of the proposed algorithm was affected by the convergence threshold and the maximum allowed iterative number of each subalgorithm, as well as the number of time slots. Considering the low complexity of the interior-point method and the bisection method, the overall computational complexity was comparatively low.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, Y.; Yang, Y.; Ma, X.; Li, S. Computational optimal launching control for balloon-borne solar-powered unmanned aerial vehicles in near-space. Sci. Prog. 2019, 103, 36850419877755. [Google Scholar] [CrossRef] [PubMed]
- Foust, J. SpaceX’s space-Internet woes: Despite technical glitches, the company plans to launch the first of nearly 12,000 satellites in 2019. IEEE Spectr. 2019, 56, 50–51. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Wang, D.; Zhang, Z. Mission-oriented cooperative 3d path planning for modular solar-powered aircraft with energy optimization. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Gu, J.; Wang, H.; Ding, G.; Xu, Y.; Xue, Z.; Zhou, H. Energy-Constrained Completion Time Minimization in UAV-Enabled Internet of Things. IEEE Internet Things J. 2020, 7, 5491–5503. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, Y.; Hu, Y.; Ma, X. Channel-Aware Potential Field Trajectory Planning for Solar-Powered Relay UAV in Near-Space. IEEE Access 2020, 8, 143950–143961. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Li, R.; Ng, D.W.K.; Yuan, J. Energy-Efficient Resource Allocation for Secure UAV Communication Systems. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–8. [Google Scholar]
- Yang, G.; Dai, R.; Liang, Y.-C. Energy-efficient uav backscatter communication with joint trajectory design and resource optimization. IEEE Trans. Wirel. Commun. 2020, 20, 926–941. [Google Scholar] [CrossRef]
- Yang, N.; Wang, L.; Geraci, G.; Elkashlan, M.; Yuan, J.; Renzo, M.D. Safeguarding 5g wireless communication networks using physical-layer security. IEEE Commun. Mag. 2015, 53, 20–27. [Google Scholar] [CrossRef]
- Liang, Y.; Poor H., V.; Shamai, S. Secure communication over fading channels. IEEE Trans. Inf. Theory 2008, 54, 2470–2492. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Bai, B.; Chen, W.; Han, Z. Secure green communication via untrusted two-way relaying: A physical layer approach. IEEE Trans. Commun. 2016, 64, 1861–1874. [Google Scholar] [CrossRef]
- Zhu, Y.; Zheng, G.; Fitch, M. Secrecy Rate Analysis of UAV-Enabled mmWave Networks Using Matérn Hardcore Point Processes. IEEE J. Sel. Areas Commun. 2018, 36, 1397–1409. [Google Scholar] [CrossRef] [Green Version]
- Cai, Y.; Wei, Z.; Li, R.; Ng, D.W.K.; Yuan, J. Joint trajectory and resource allocation design for energy-efficient secure uav communication systems. IEEE Trans. Commun. 2020, 68, 4536–4553. [Google Scholar] [CrossRef] [Green Version]
- Hua, M.; Wang, Y.; Wu, Q.; Dai, H.; Huang, Y.; Yang, L. Energy-Efficient Cooperative Secure Transmission in Multi-UAV-Enabled Wireless Networks. IEEE Trans. Veh. Technol. 2019, 68, 7761–7775. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Xu, Y.; Yang, D.; Zeng, Y. Secrecy energy efficiency maximization for uav-enabled mobile relaying. IEEE TGCN 2019, 4, 180–193. [Google Scholar] [CrossRef] [Green Version]
- Shakoor, S.; Kaleem, Z.; Do, D.-T.; Dobre, O.A.; Jamalipour, A. Joint optimization of UAV 3D placement and path loss factor for energy efficient maximal coverage. IEEE IoT J. 2021, 8, 9776–9786. [Google Scholar]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV communications via joint trajectory and power control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef] [Green Version]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]
- Schaible, S. Fractional programming. II, on Dinkelbach’s algorithm. Manag. Sci. 1976, 22, 868–873. [Google Scholar] [CrossRef]
- Bezdek, J.C.; Hathaway, R.J. Some notes on alternating optimization. In Proceedings of the 2002 AFSS International Conference on Fuzzy Systems, Calcutta, India, 3–6 February 2002; pp. 288–300. [Google Scholar]
- Gopala, P.K.; Lai, L.; Gamal, H.E. On the secrecy capacity of fading channels. IEEE Trans. Inf. Theory 2008, 54, 4687–4698. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Bai, B.; Zhao, W.; Han, Z. A survey of optimization approaches for wireless physical-layer security. IEEE Commun. Surv. Tutor. 2018, 21, 1878–1911. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004; pp. 561–630. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Names | Descriptions | Parameters |
|---|---|---|
| JO | Our proposed scheme | Calculated |
| TO | Trajectory optimization with given power | Choose as the given power |
| PO | Power optimization with a given trajectory | Choose as the constant velocity |
| CON | Given power and trajectory | Choose and |
| Parameter Definition | Notations | Value |
|---|---|---|
| Common Parameter Settings | ||
| The height the UAV flies at | H | 100 m |
| The coordinates of R | ||
| The coordinates of E | ||
| Time slot | 0.5 s | |
| Maximum velocity | m/s | |
| Maximum acceleration | m/s | |
| Channel gain | 50 dB | |
| Noise power | 100 dBm | |
| Energy consumption parameters | ||
| Convergence threshold | , | , |
| Specific Parameter Settings for Downlink Communication | ||
| The UAV’s initial and final positions | , | , |
| Maximum UAV’s transmit power | ||
| Average UAV’s transmit power | dBm | |
| Flight time | T | s |
| The UAV’s initial and final velocities | ||
| Specific Parameter Settings for Uplink Communication | ||
| The UAV’s initial and final positions | , | , |
| Maximum UAV’s transmit power | ||
| Average UAV’s transmit power | dBm | |
| Flight time | T | s |
| The UAV’s initial and final velocities | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Z.; Yang, Y.; Wang, D.; Ma, X. Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security. Aerospace 2022, 9, 50. https://doi.org/10.3390/aerospace9020050
Yuan Z, Yang Y, Wang D, Ma X. Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security. Aerospace. 2022; 9(2):50. https://doi.org/10.3390/aerospace9020050
Chicago/Turabian StyleYuan, Ziwei, Yanping Yang, Dong Wang, and Xiaoping Ma. 2022. "Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security" Aerospace 9, no. 2: 50. https://doi.org/10.3390/aerospace9020050
APA StyleYuan, Z., Yang, Y., Wang, D., & Ma, X. (2022). Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security. Aerospace, 9(2), 50. https://doi.org/10.3390/aerospace9020050