
Maneuvering Spacecraft Orbit Determination Using Polynomial Representation


Abstract
:1. Introduction
2. Problem Formulation
2.1. State Model
2.2. Measurement Model
3. Orbit Determination Using Polynomial Representation
3.1. Polynomial Representation for Unknown Maneuver
3.2. Extended Kalman Filter with Polynomial Representation
3.2.1. Time Update
- Given the estimated state and covariance matrix at .
- Calculate the predicted states .where is the discrete form of the state model in Equation (9).
- Calculate the predicted covariance matrix .
3.2.2. Measurement Update
- Calculate the predicted measurement .
- Calculate the predicted associated covariance , .where is the covariance matrix of the measurement noise, is the Jacobian matrix of the measurement model:
- On the receipt of the measurement , calculate the estimated state and covariance matrix at .
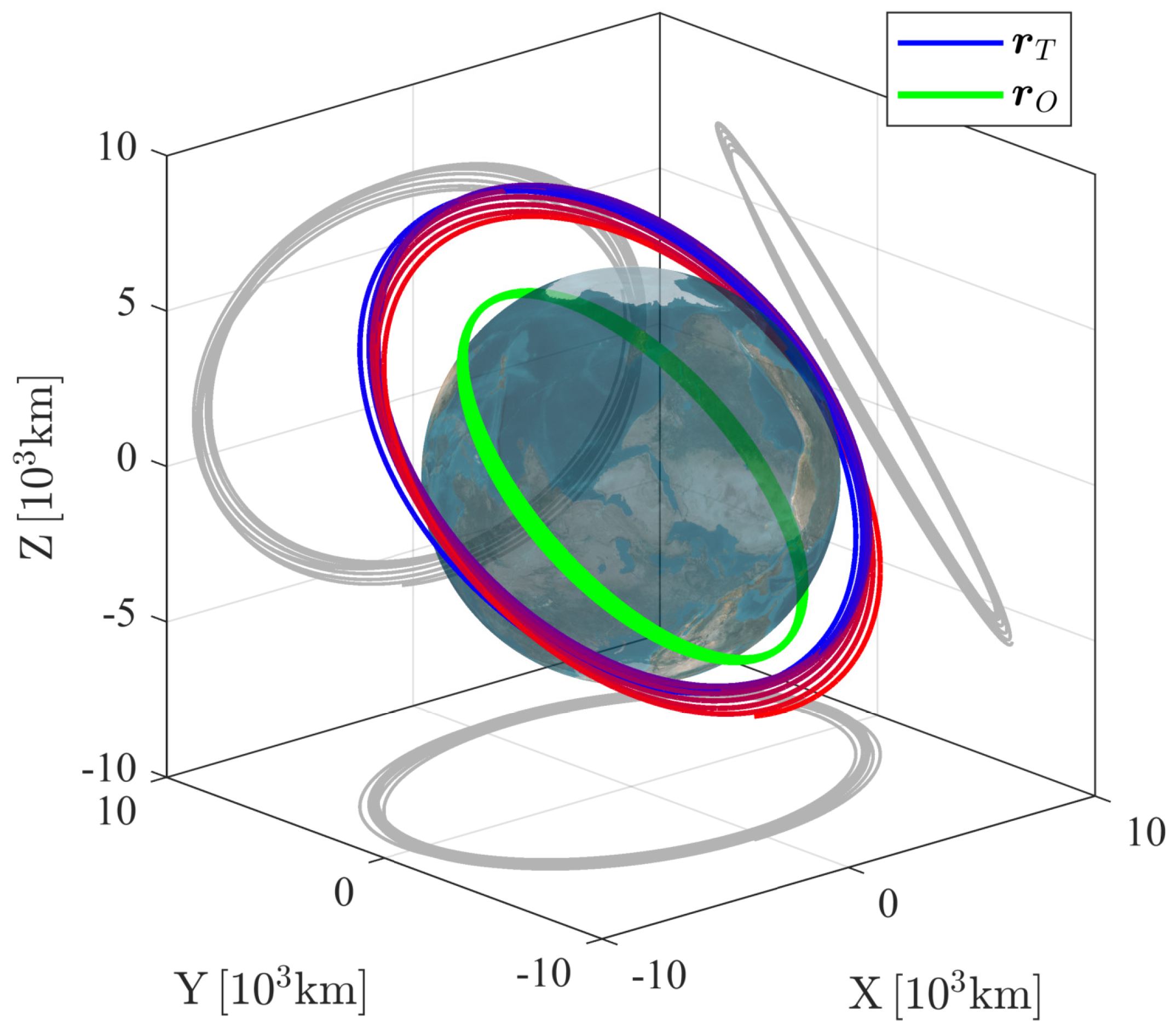
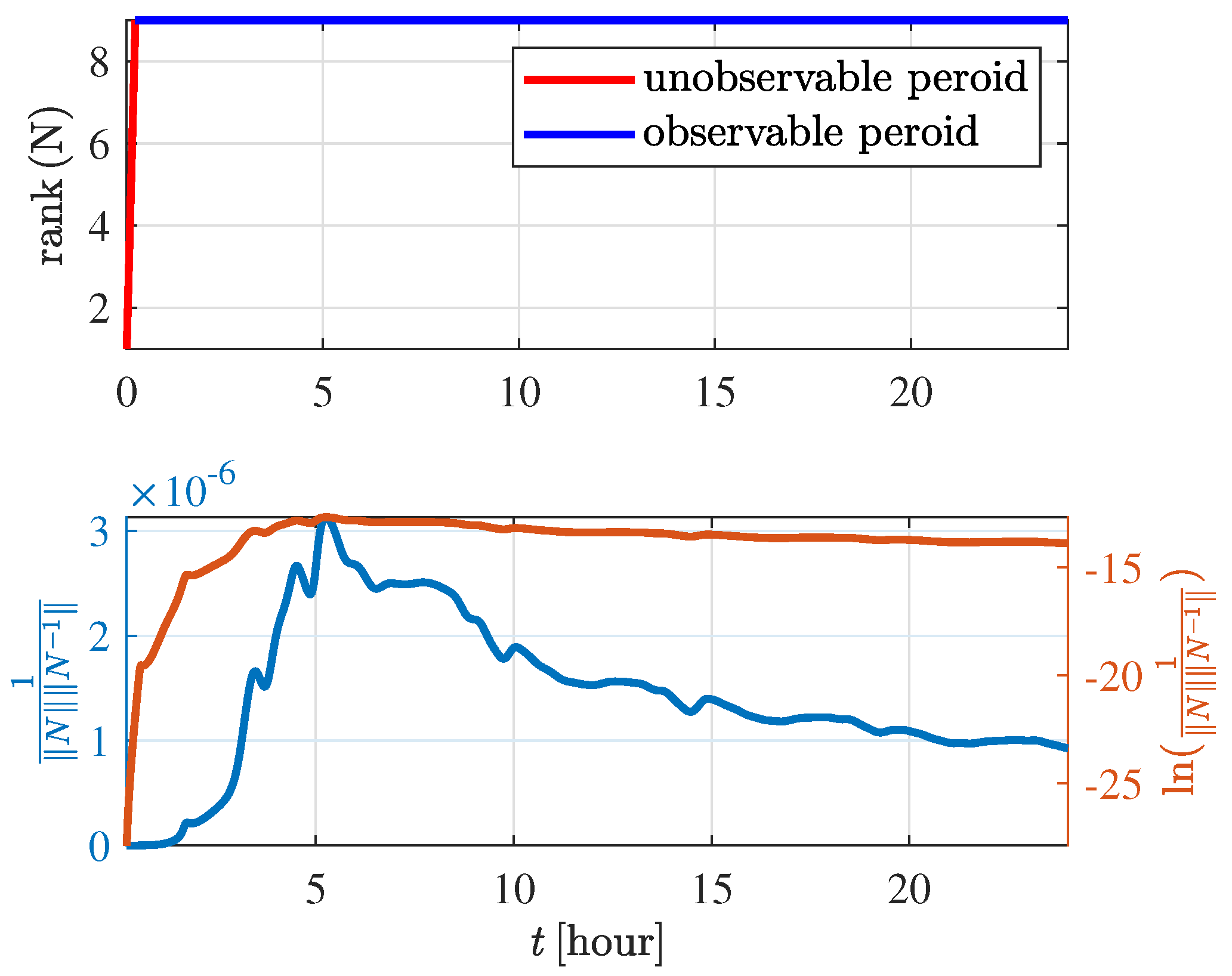
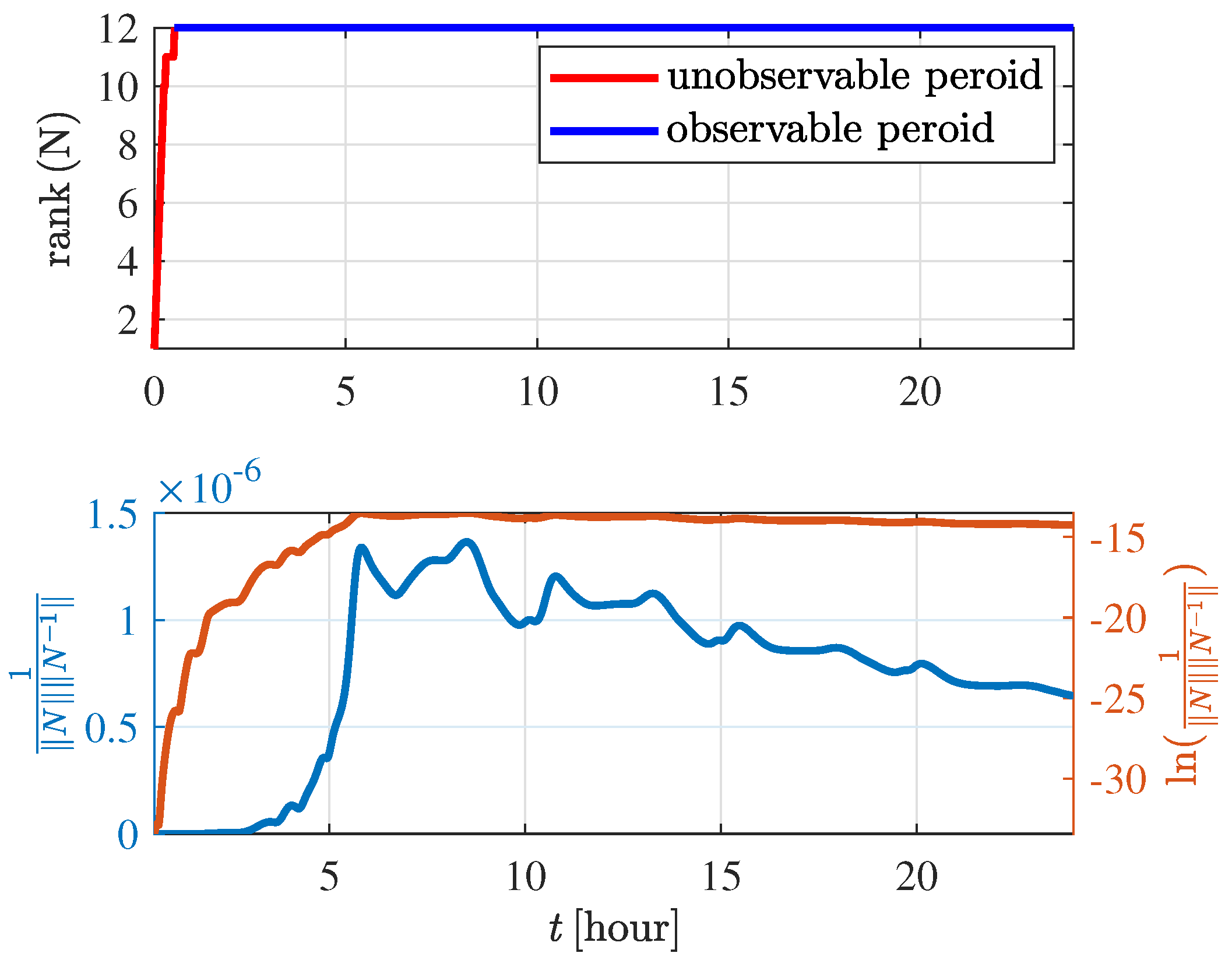
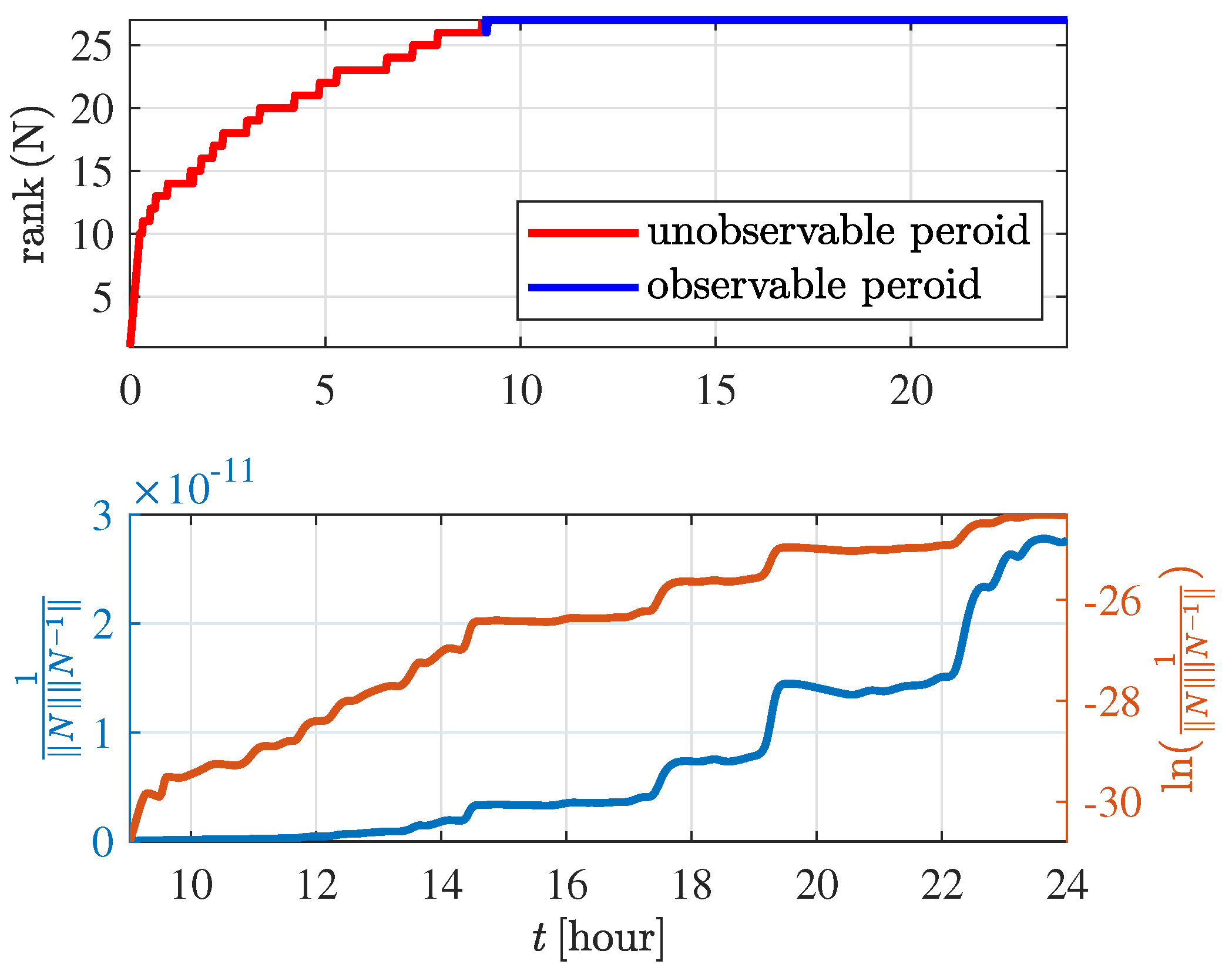
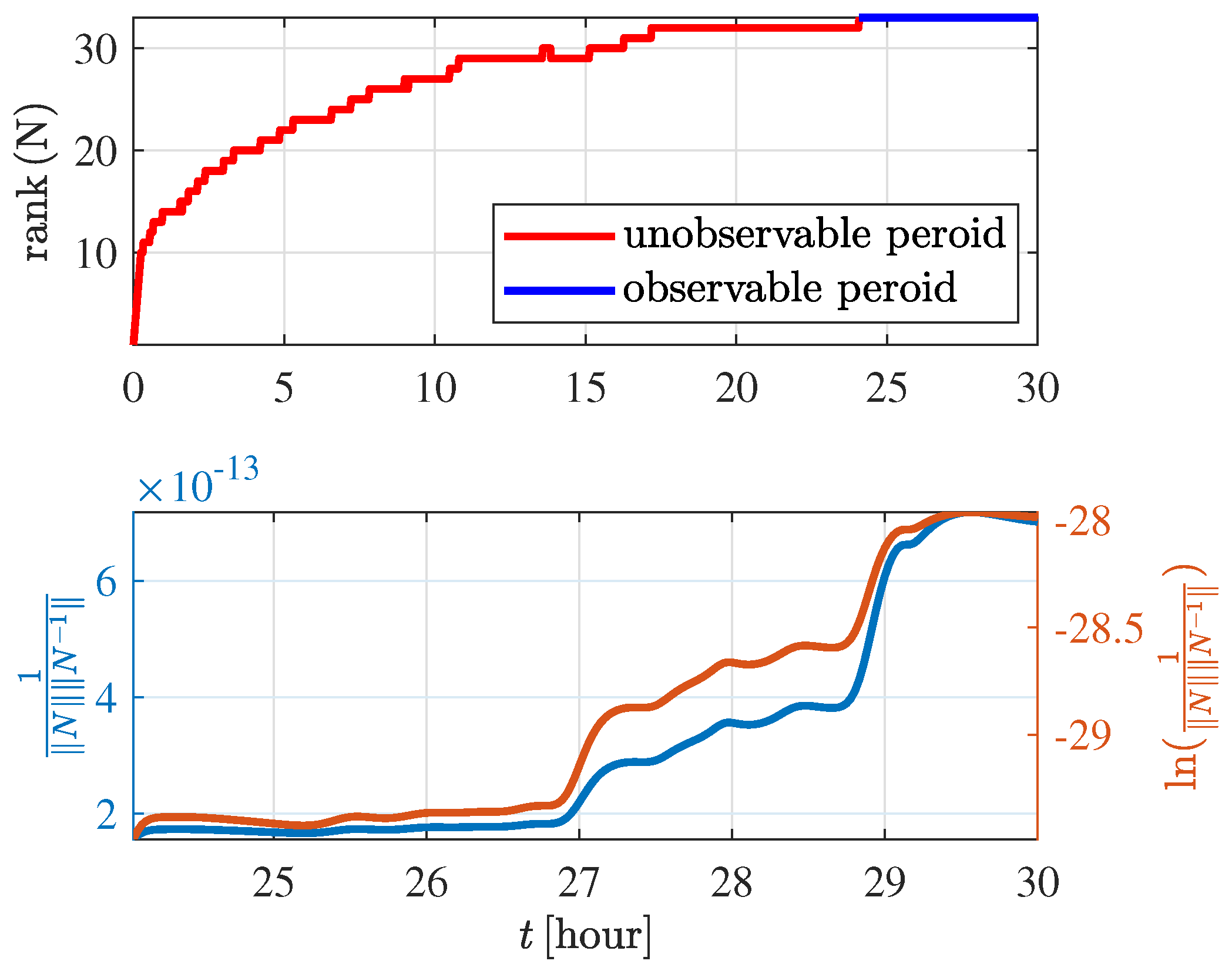
4. Observability Analysis
4.1. Observability Matrix
4.2. Observability Analysis Results
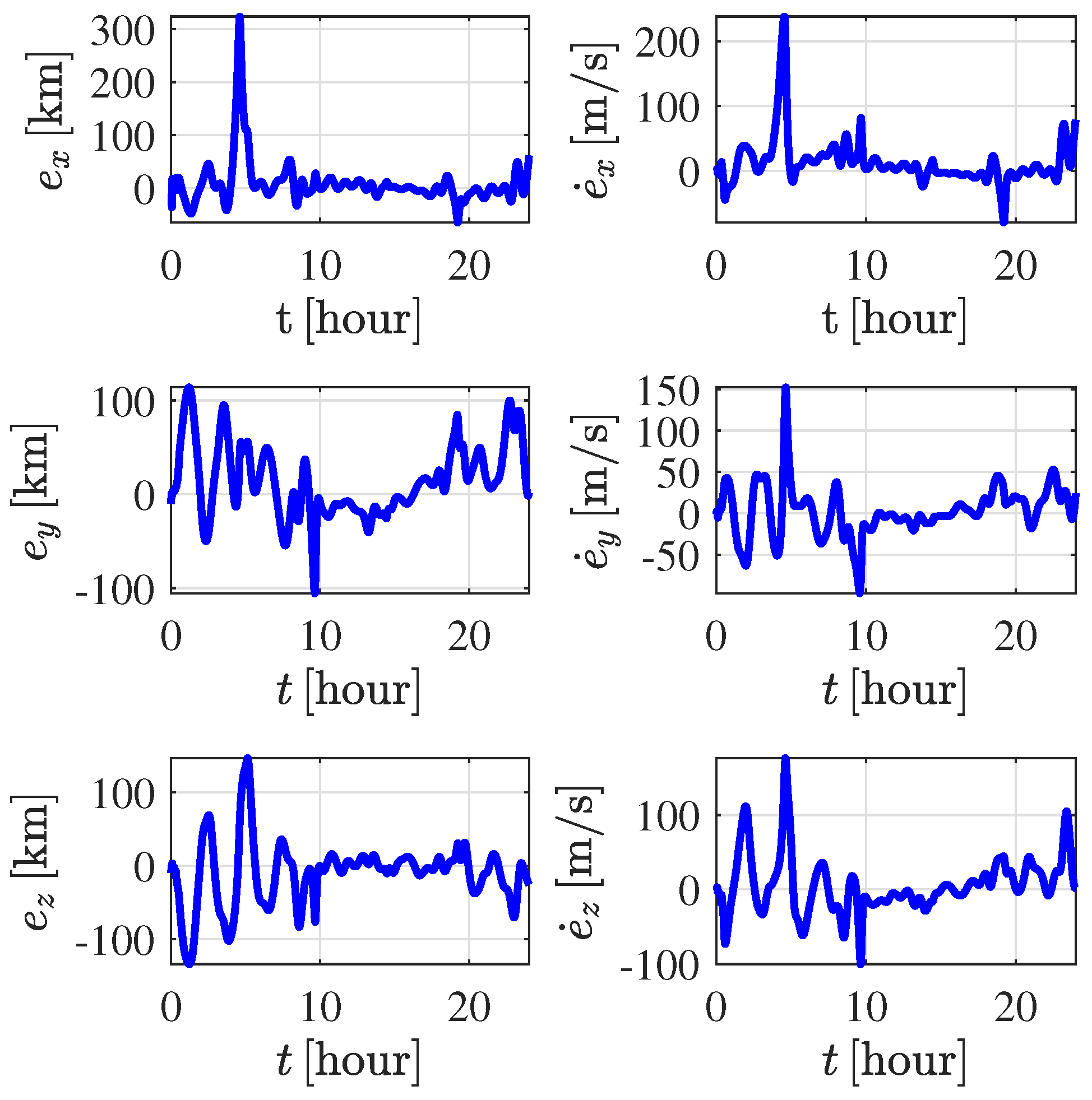
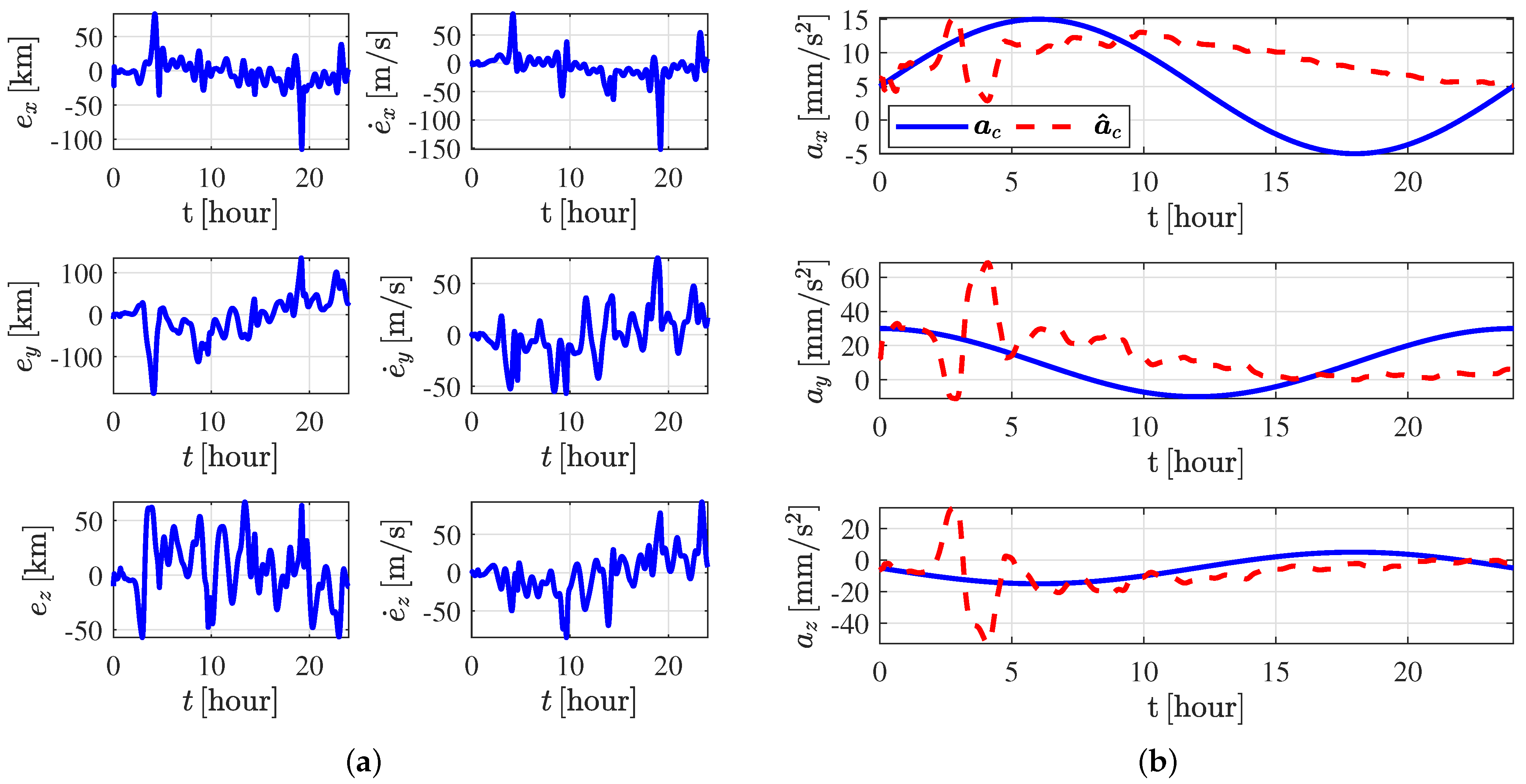
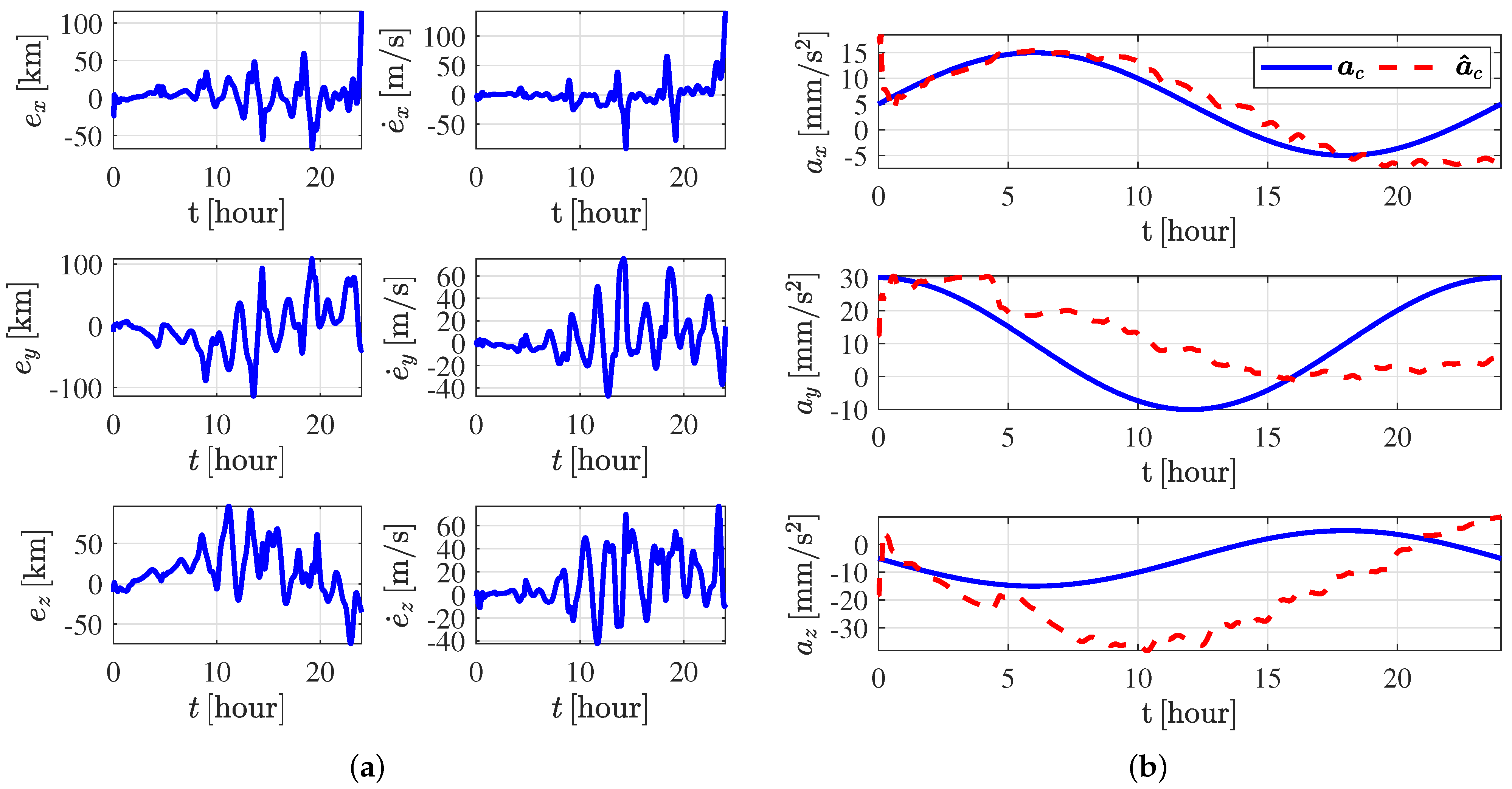
5. Performance Analysis
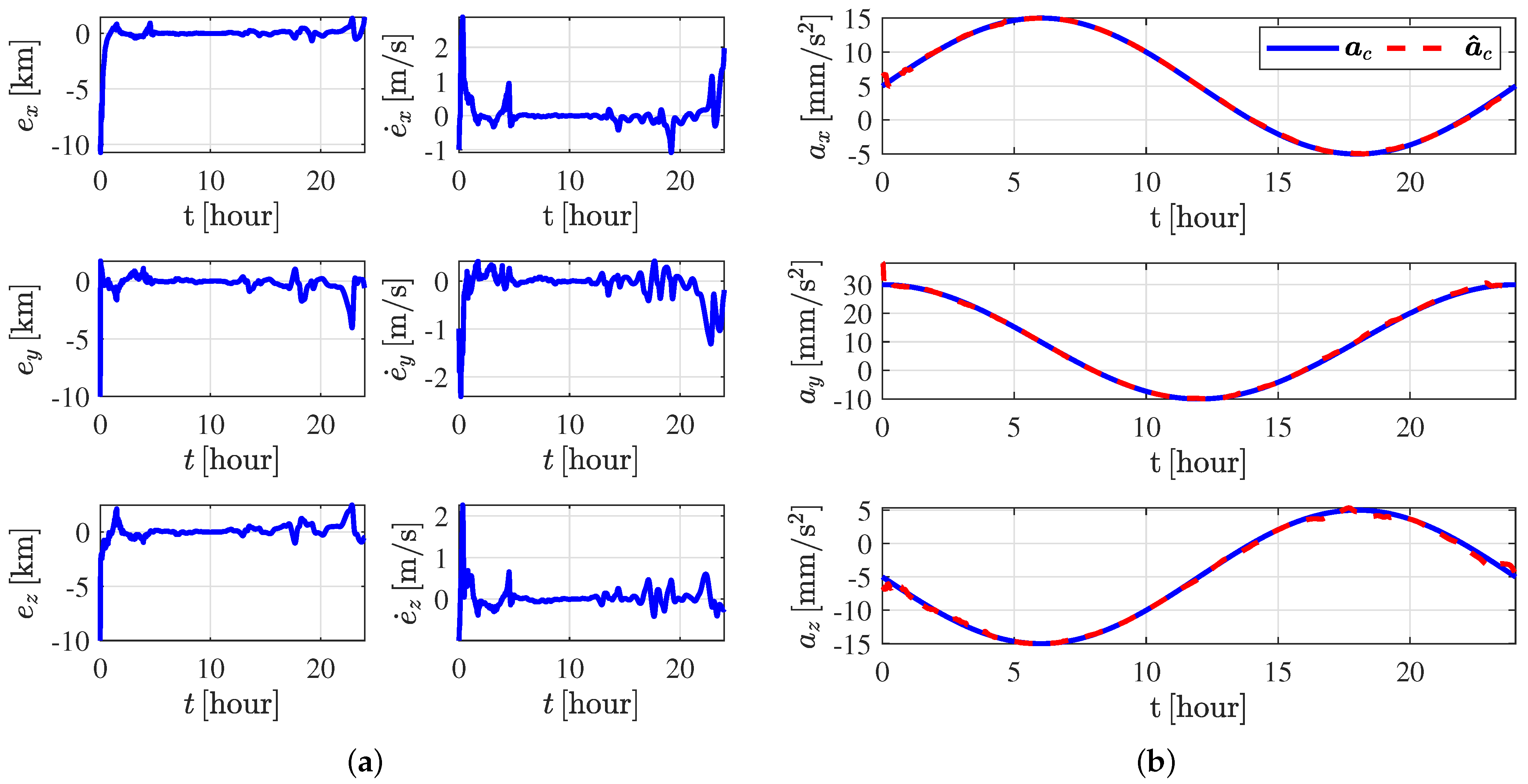
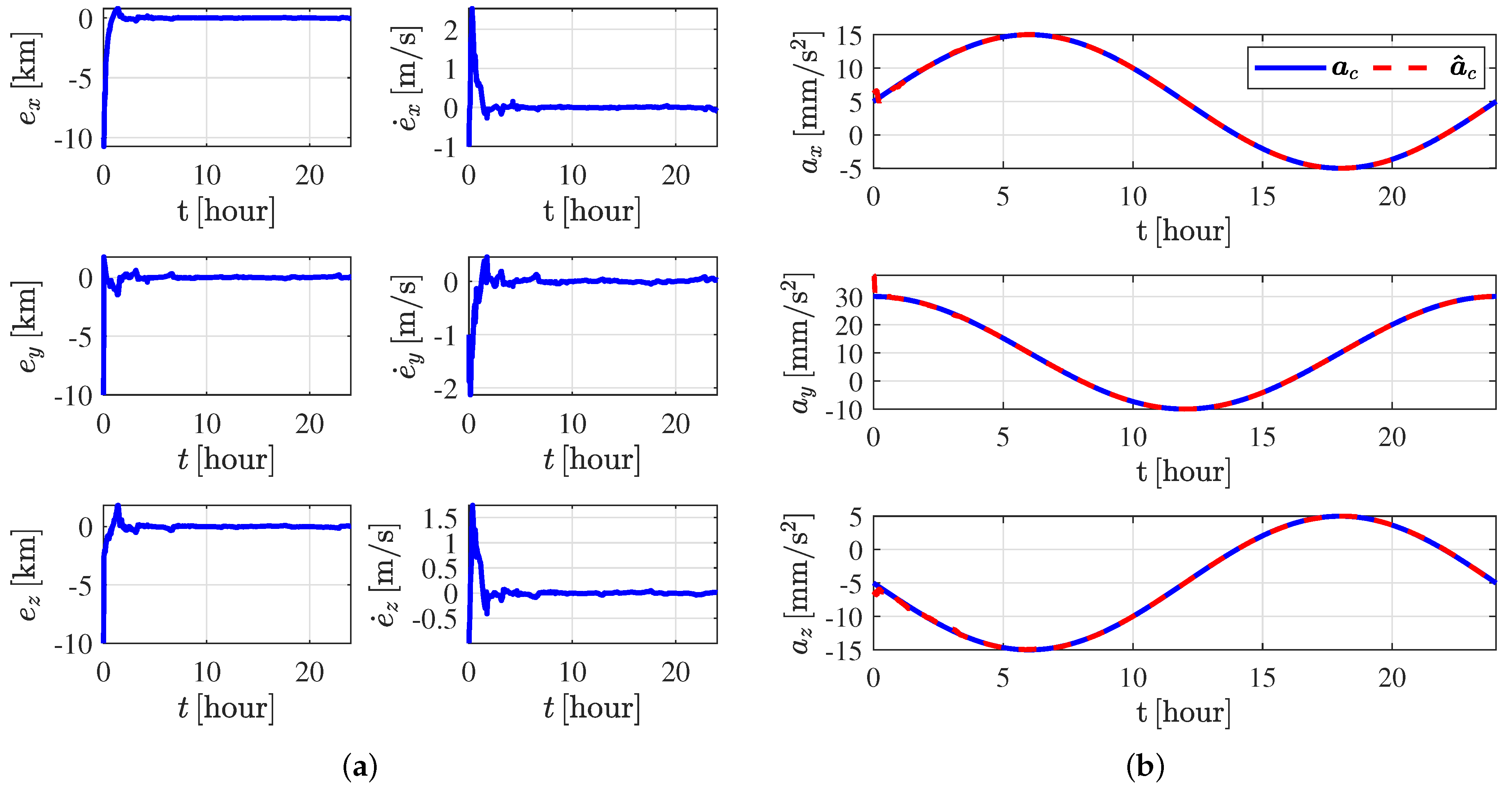
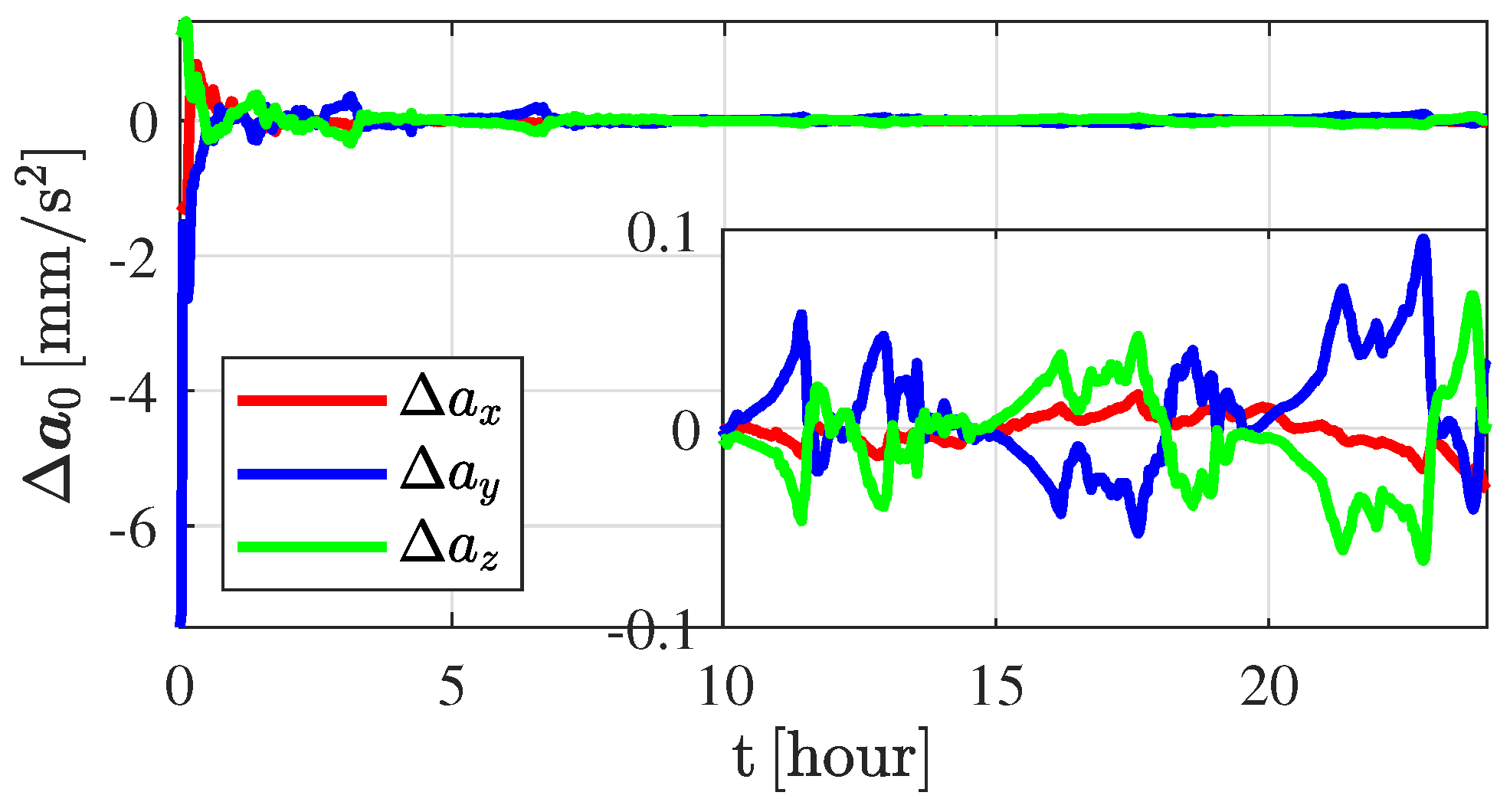
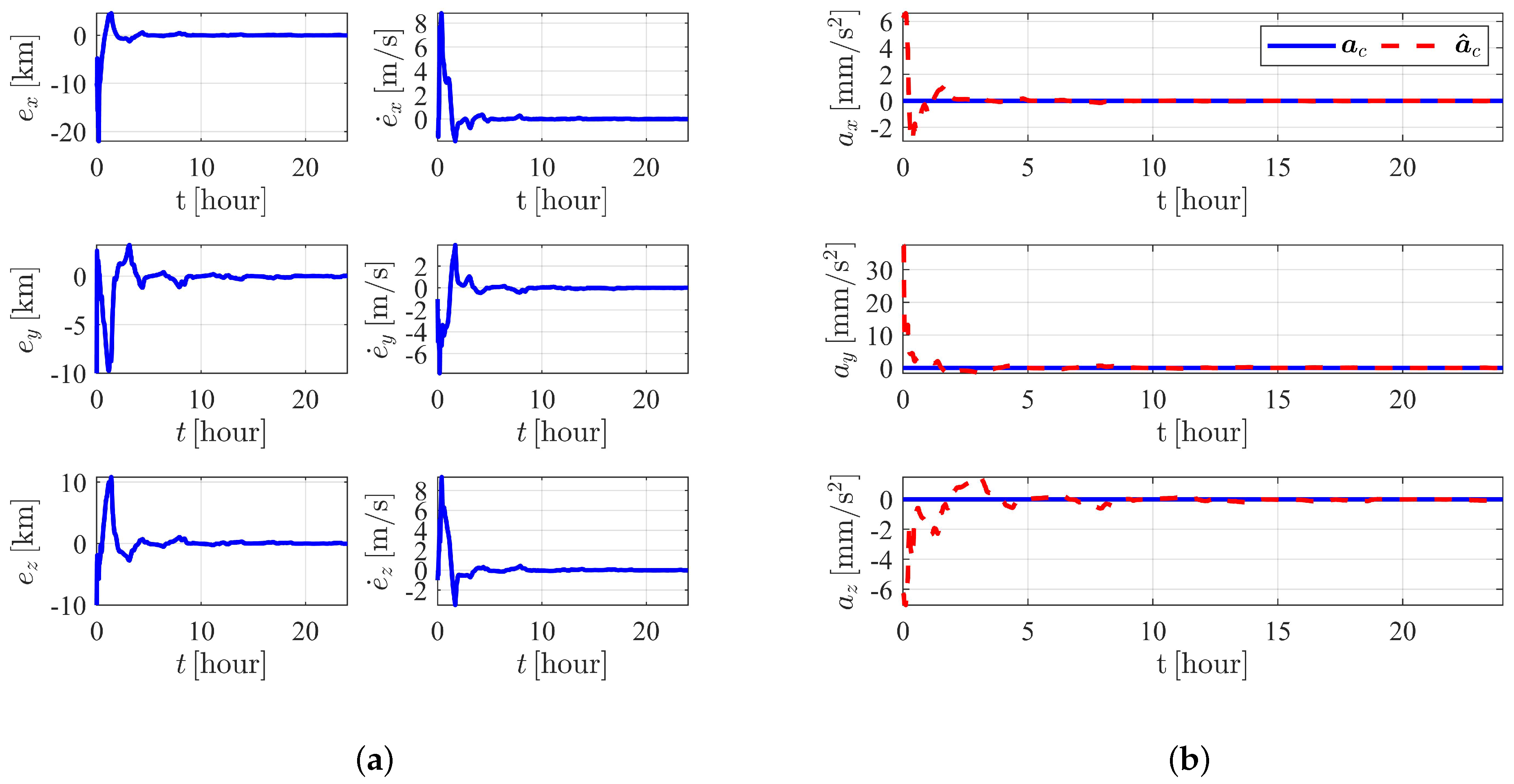
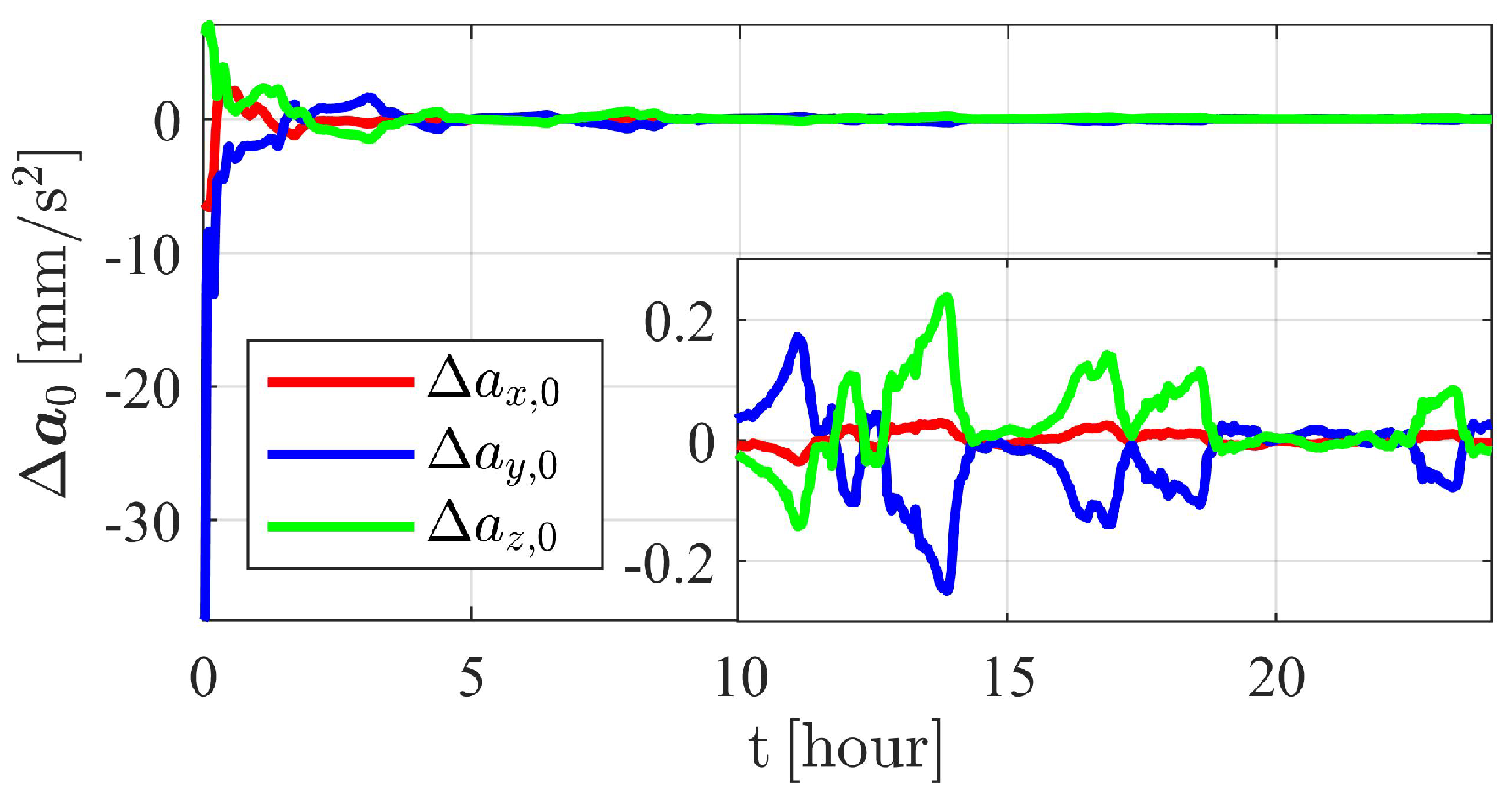
5.1. Maneuvering Case
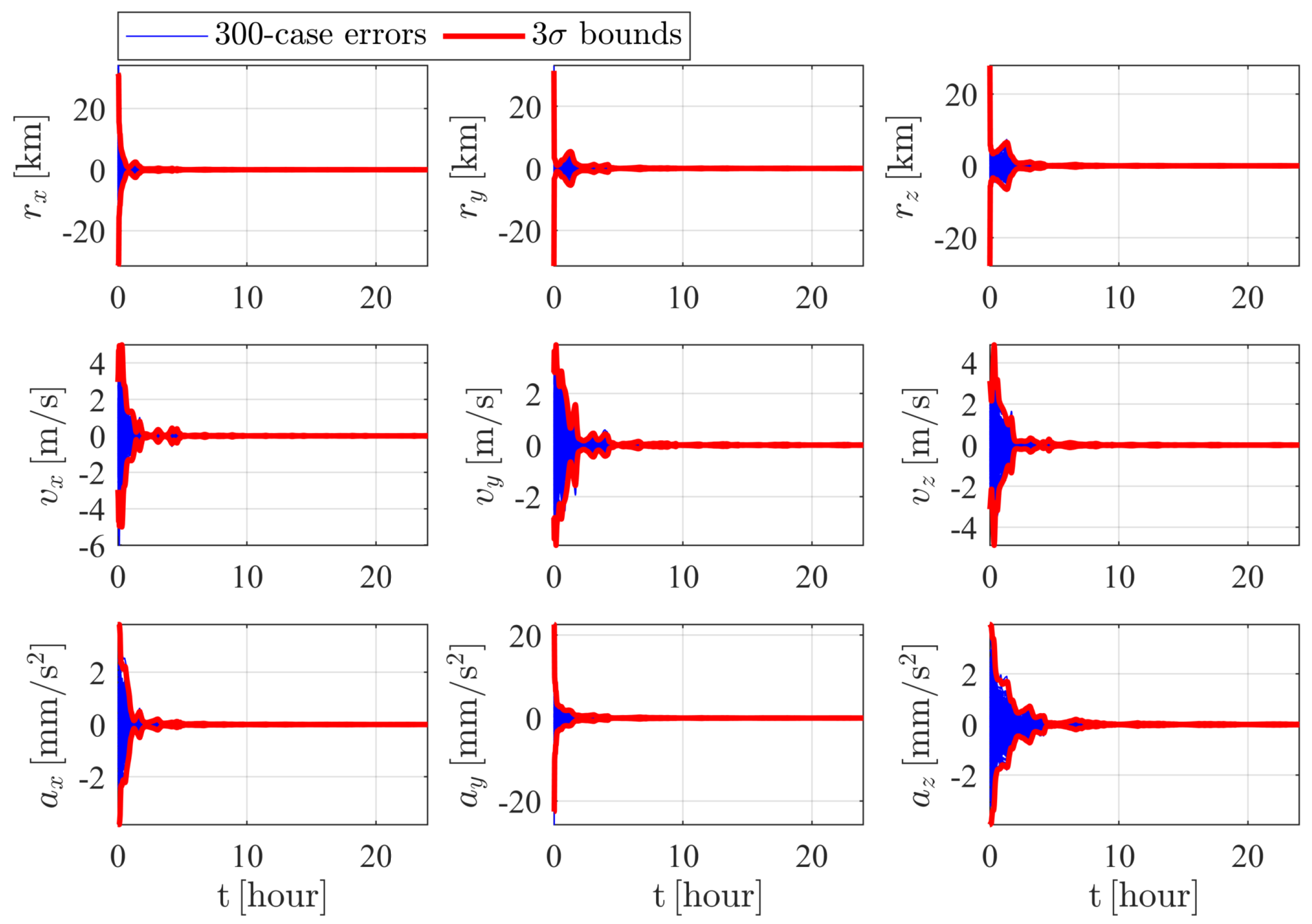
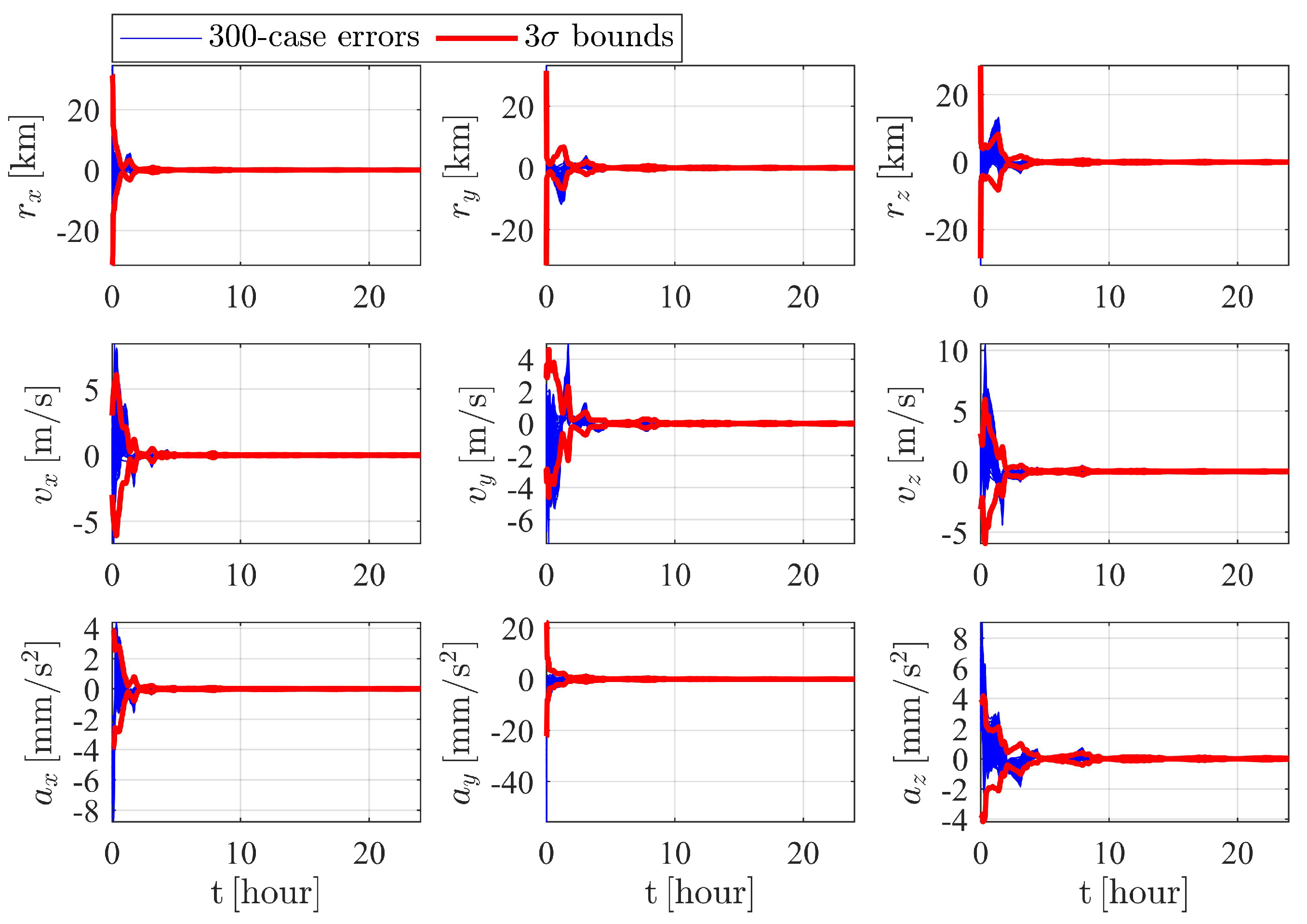
5.2. Non-Maneuvering Case
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cui, P.Y.; Qiao, D.; Cui, H.T.; Luan, E.J. Target selection and transfer trajectories design for exploring asteroid mission. Sci. China Technol. Sci. 2010, 53, 1150–1158. [Google Scholar] [CrossRef]
- Yang, H.; Li, S.; Bai, X. Fast homotopy method for asteroid landing trajectory optimization using approximate initial costates. J. Guid. Control Dyn. 2019, 42, 585–597. [Google Scholar] [CrossRef]
- Colagrossi, A.; Lavagna, M. Fault Tolerant Attitude and Orbit Determination System for Small Satellite Platforms. Aerospace 2022, 9, 46. [Google Scholar] [CrossRef]
- Wang, Y.; Qiao, D.; Cui, P. Design of optimal impulse transfers from the Sun-Earth libration point to asteroid. Adv. Space Res. 2015, 56, 176–186. [Google Scholar] [CrossRef]
- Pesce, V.; Silvestrini, S.; Lavagna, M. Radial basis function neural network aided adaptive extended Kalman filter for spacecraft relative navigation. Aerosp. Sci. Technol. 2020, 96, 105527. [Google Scholar] [CrossRef]
- Cloutier, J.R.; Lin, C.F.; Yang, C. Maneuvering target tracking via smoothing and filtering through measurement concatenation. J. Guid. Control Dyn. 1993, 16, 377–384. [Google Scholar] [CrossRef]
- Yu, S.; Wang, X.; Zhu, T. Maneuver detection methods for space objects based on dynamical model. Adv. Space Res. 2021, 68, 71–84. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Jia, F. Investigation of Stable Regions of Spacecraft Motion in Binary Asteroid Systems by Terminal Condition Maps. J. Astronaut. Sci. 2021, 68, 891–915. [Google Scholar] [CrossRef]
- Ko, H.C.; Scheeres, D.J. Tracking maneuvering satellite using thrust-fourier-coefficient event representation. J. Guid. Control Dyn. 2016, 39, 216–221. [Google Scholar] [CrossRef]
- Jia, F.; Li, X.; Huo, Z.; Qiao, D. Mission Design of an Aperture-Synthetic Interferometer System for Space-Based Exoplanet Exploration. Space Sci. Technol. 2022, 2022, 9835234. [Google Scholar] [CrossRef]
- Kelecy, T.; Jah, M. Detection and orbit determination of a satellite executing low thrust maneuvers. Acta Astronaut. 2010, 66, 798–809. [Google Scholar] [CrossRef]
- Chan, Y.T.; Hu, A.G.; Plant, J.B. A Kalman Filter Based Tracking Scheme with Input Estimation. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 237–244. [Google Scholar] [CrossRef]
- Zhou, X.; Cheng, Y.; Qiao, D.; Huo, Z. An adaptive surrogate model-based fast planning for swarm safe migration along halo orbit. Acta Astronaut. 2022, 194, 309–322. [Google Scholar] [CrossRef]
- Lubey, D.P.; Scheeres, D.J.; Erwin, R.S. Maneuver Detection and Reconstruction of Station-keeping Spacecraft at GEO using the Optimal Control-Based Estimator. IFAC-PapersOnLine 2015, 48, 216–221. [Google Scholar] [CrossRef]
- Serra, R.; Yanez, C.; Frueh, C. Tracklet-to-orbit association for maneuvering space objects using optimal control theory. Acta Astronaut. 2021, 181, 271–281. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, W.; Qiao, D.; Li, X. Effect of orbital shadow at an Earth-Moon Lagrange point on relay communication mission. Sci. China Inf. Sci. 2017, 60, 112301. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, Z.; Wang, N.; Hoque, M.; Wang, L.; Li, R.; Zhang, Y.; Yuan, H. Real-Time Precise Orbit Determination for LEO between Kinematic and Reduced-Dynamic with Ambiguity Resolution. Aerospace 2022, 9, 25. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Li, P. Bounded trajectory design and self-adaptive maintenance control near non-synchronized binary systems comprised of small irregular bodies. Acta Astronaut. 2018, 152, 768–781. [Google Scholar] [CrossRef]
- Li, T.; Li, K.; Chen, L. New manoeuvre detection method based on historical orbital data for low Earth orbit satellites. Adv. Space Res. 2018, 62, 554–567. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Chen, H. Interplanetary transfer optimization using cost function with variable coefficients. Astrodynamics 2019, 3, 173–188. [Google Scholar] [CrossRef]
- Hough, M.E. Reentry maneuver estimation using nonlinear Markov acceleration models. J. Guid. Control Dyn. 2017, 40, 1693–1710. [Google Scholar] [CrossRef]
- Guang, Z.; Xingzi, B.; Hanyu, Z.; Bin, L. Non-cooperative maneuvering spacecraft tracking via a variable structure estimator. Aerosp. Sci. Technol. 2018, 79, 352–363. [Google Scholar] [CrossRef]
- Zhai, G.; Wang, Y.; Zhao, Q. Tracking the maneuvering spacecraft propelled by swing propulsion of constant magnitude. J. Syst. Eng. Electron. 2020, 31, 370–382. [Google Scholar] [CrossRef]
- Maybeck, P.S.; Hentz, K.P. Investigation of moving-bank multiple model adaptive algorithms. J. Guid. Control Dyn. 1987, 10, 90–96. [Google Scholar] [CrossRef]
- Lee, S.; Lee, J.; Hwang, I. Maneuvering spacecraft tracking via state-dependent adaptive estimation. J. Guid. Control Dyn. 2016, 39, 2034–2043. [Google Scholar] [CrossRef]
- Linares, R.; Furfaro, R. Space Objects Maneuvering Detection and Prediction via Inverse Reinforcement Learning. In Proceedings of the Advanced Maui Optical and Space Surveillance, Maui, HI, USA, 19–22 September 2017; Volume 46, p. 46. [Google Scholar]
- Wang, Y.; Bai, X.; Peng, H.; Chen, G.; Shen, D.; Blasch, E.; Sheaff, C.B. Gaussian-Binary classification for resident space object maneuver detection. Acta Astronaut. 2021, 187, 438–446. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Improving orbit prediction accuracy through supervised machine learning. Adv. Space Res. 2018, 61, 2628–2646. [Google Scholar] [CrossRef] [Green Version]
- Silvestrini, S.; Lavagna, M. Neural-based predictive control for safe autonomous spacecraft relative maneuvers. J. Guid. Control. Dyn. 2021, 44, 2303–2310. [Google Scholar] [CrossRef]
- Wu, W.; Tang, Y.; Zhang, L.; Qiao, D. Design of communication relay mission for supporting lunar-farside soft landing. Sci. China Inf. Sci. 2018, 61, 040305. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Li, P. Frozen orbit design and maintenance with an application to small body exploration. Aerosp. Sci. Technol. 2019, 92, 170–180. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Qiao, D.; Mao, Q.; Jiang, J. Transfer to near-Earth asteroids from a lunar orbit via Earth flyby and direct escaping trajectories. Acta Astronaut. 2017, 133, 177–184. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Barucci, M.A. Analysis of equilibria in the doubly synchronous binary asteroid systems concerned with non-spherical shape. Astrodynamics 2018, 2, 133–146. [Google Scholar] [CrossRef]
- Qin, T.; Macdonald, M.; Qiao, D. Fully Decentralized Cooperative Navigation for Spacecraft Constellations. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2383–2394. [Google Scholar] [CrossRef]
- Qin, T.; Qiao, D.; Macdonald, M. Relative orbit determination using only intersatellite range measurements. J. Guid. Control Dyn. 2019, 42, 703–710. [Google Scholar] [CrossRef]
- Qin, T.; Qiao, D.; Macdonald, M. Relative orbit determination for unconnected spacecraft within a constellation. J. Guid. Control Dyn. 2021, 44, 614–621. [Google Scholar] [CrossRef]
- Luo, Y.; Qin, T.; Zhou, X. Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination. Aerospace 2022, 9, 166. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a/km | e | i/deg | /deg | /deg | n/deg | |
|---|---|---|---|---|---|---|
| Target | 8871.14 | 0.05 | 45 | 94.8 | 199.0 | 305.87 |
| Observer | 6871.14 | 0.01 | 45.5 | 29.93 | 132.9 | 252.26 |
| Position (km) | Velocity (m/s) | |||||
|---|---|---|---|---|---|---|
| Case without polynomials | 42.9745 | 41.0717 | 45.2176 | 37.5253 | 29.8473 | 38.3986 |
| First-order polynomials | 18.7515 | 38.5372 | 33.1376 | 21.1524 | 22.7494 | 25.2830 |
| Sixth-order polynomials | 0.8887 | 0.7339 | 0.6962 | 0.3923 | 0.3587 | 0.2428 |
| Eighth-order polynomials | 0.8247 | 0.4135 | 0.4614 | 0.2751 | 0.2305 | 0.2104 |
| Ninth-order polynomials | 0.8572 | 0.4014 | 0.4641 | 0.2774 | 0.2375 | 0.2028 |
| Tenth-order polynomials | 0.8572 | 0.4014 | 0.4640 | 0.2774 | 0.2375 | 0.2028 |
| One-Step Run Time (s) | Mean Value | Maximum | Minimum |
|---|---|---|---|
| Zeroth-order polynomials | 0.0405 | 0.1731 | 0.0214 |
| First-order polynomials | 0.0495 | 0.2083 | 0.0261 |
| Sixth-order polynomials | 0.1143 | 0.3482 | 0.0598 |
| Eighth-order polynomials | 0.1405 | 0.5584 | 0.0733 |
| Ninth-order polynomials | 0.1852 | 0.6222 | 0.0841 |
| Tenth-order polynomials | 0.2015 | 0.6507 | 0.0911 |
| x-Axis | y-Axis | z-Axis | ||
|---|---|---|---|---|
| Position (km) | Initial STDs | 10.5165 | 10.4778 | 9.2985 |
| Final STDs | 0.0042 | 0.0045 | 0.0013 | |
| Convergence ratio, % | 99.9597 | 99.9562 | 99.9850 | |
| Velocity (m/s) | Initial STDs | 0.9874 | 0.9388 | 1.0395 |
| Final STDs | 0.0048 | 0.0013 | 0.0006 | |
| Convergence ratio, % | 99.5121 | 99.8581 | 99.9360 | |
| Acceleration (mm/s2) | Initial STDs | 1.2727 | 7.5294 | 1.3175 |
| Final STDs | 0.0007 | 0.0026 | 0.0021 | |
| Convergence ratio, % | 99.9424 | 99.9652 | 99.8353 |
| x-Axis | y-Axis | z-Axis | ||
|---|---|---|---|---|
| Position (km) | Initial STDs | 10.5201 | 10.5118 | 9.5303 |
| Final STDs | 0.0121 | 0.0197 | 0.0123 | |
| Convergence ratio, % | 99.8846 | 99.8116 | 99.8706 | |
| Velocity (m/s) | Initial STDs | 0.9956 | 0.9425 | 1.0383 |
| Final STDs | 0.0077 | 0.0059 | 0.0061 | |
| Convergence ratio, % | 99.2178 | 99.3675 | 99.4073 | |
| Acceleration (mm/s2) | Initial STDs | 1.2749 | 7.3985 | 1.3145 |
| Final STDs | 0.0021 | 0.0110 | 0.0088 | |
| Convergence ratio, % | 99.8303 | 99.8500 | 99.3248 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Qin, T.; Meng, L. Maneuvering Spacecraft Orbit Determination Using Polynomial Representation. Aerospace 2022, 9, 257. https://doi.org/10.3390/aerospace9050257
Zhou X, Qin T, Meng L. Maneuvering Spacecraft Orbit Determination Using Polynomial Representation. Aerospace. 2022; 9(5):257. https://doi.org/10.3390/aerospace9050257
Chicago/Turabian StyleZhou, Xingyu, Tong Qin, and Linzhi Meng. 2022. "Maneuvering Spacecraft Orbit Determination Using Polynomial Representation" Aerospace 9, no. 5: 257. https://doi.org/10.3390/aerospace9050257
APA StyleZhou, X., Qin, T., & Meng, L. (2022). Maneuvering Spacecraft Orbit Determination Using Polynomial Representation. Aerospace, 9(5), 257. https://doi.org/10.3390/aerospace9050257