
Non-Contact In-Vehicle Occupant Monitoring System Based on Point Clouds from FMCW Radar


 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Related Works
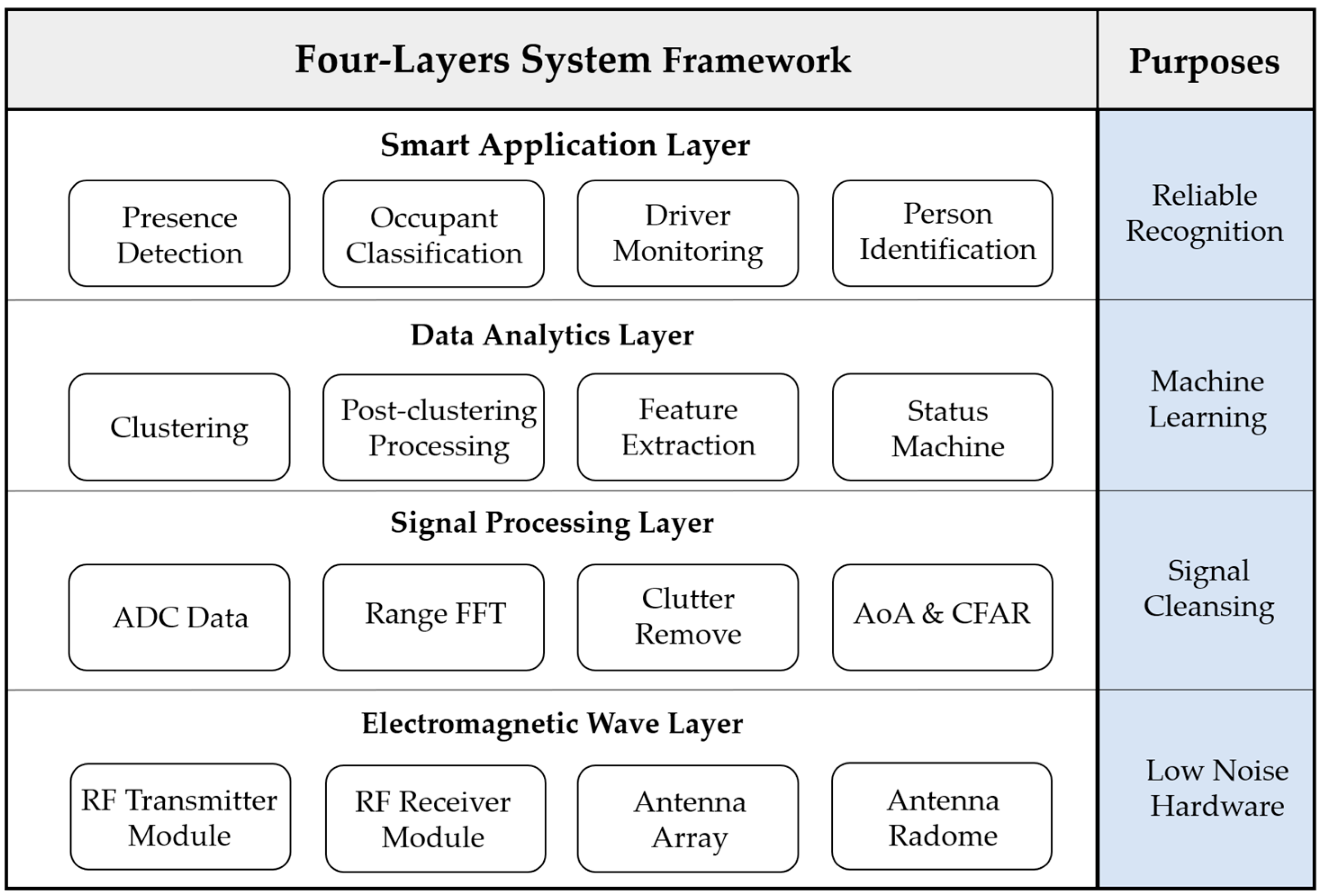
3. Layered System Framework for Occupant Monitoring
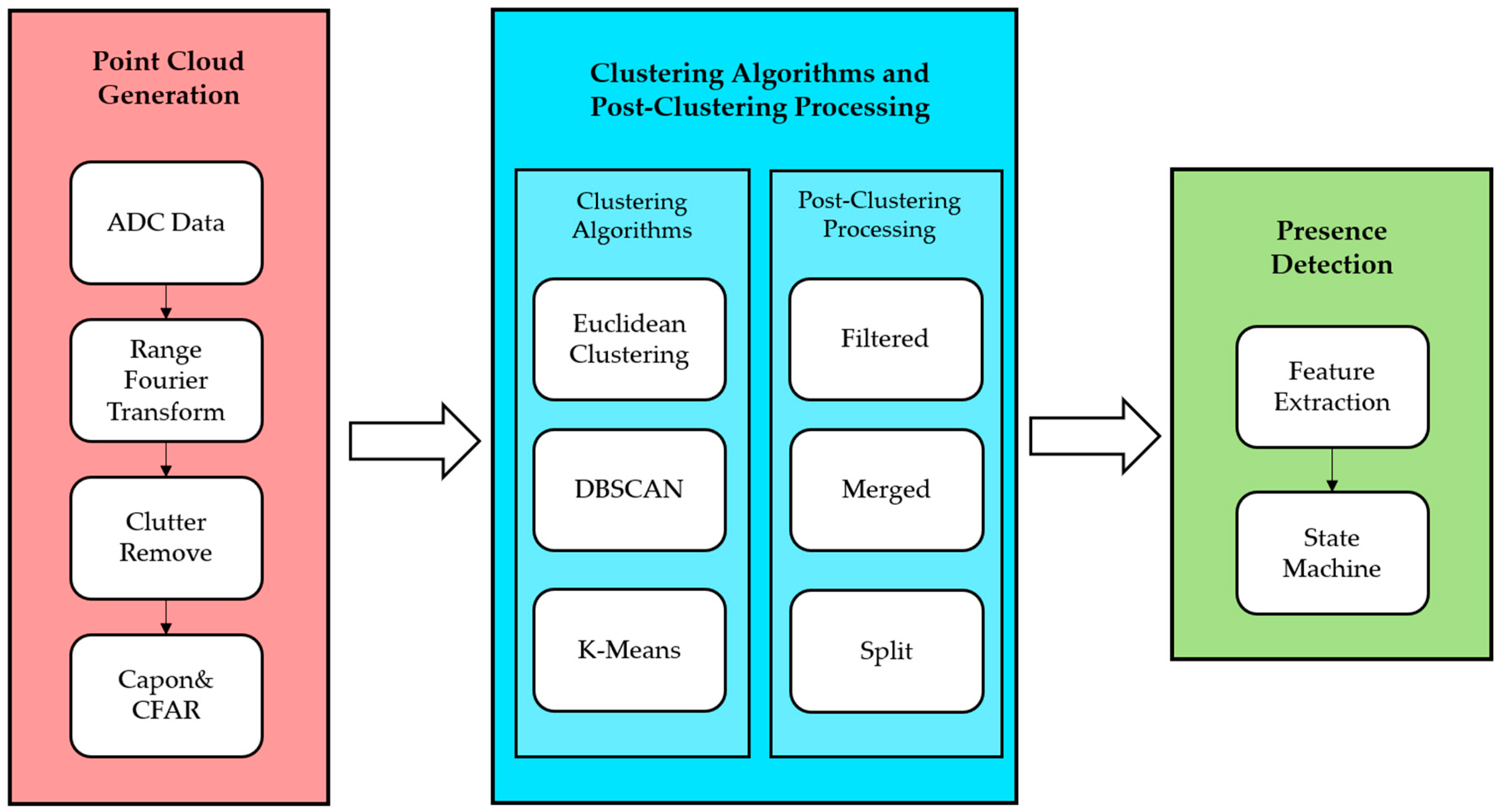
4. Processing Flow for In-Vehicle Monitoring
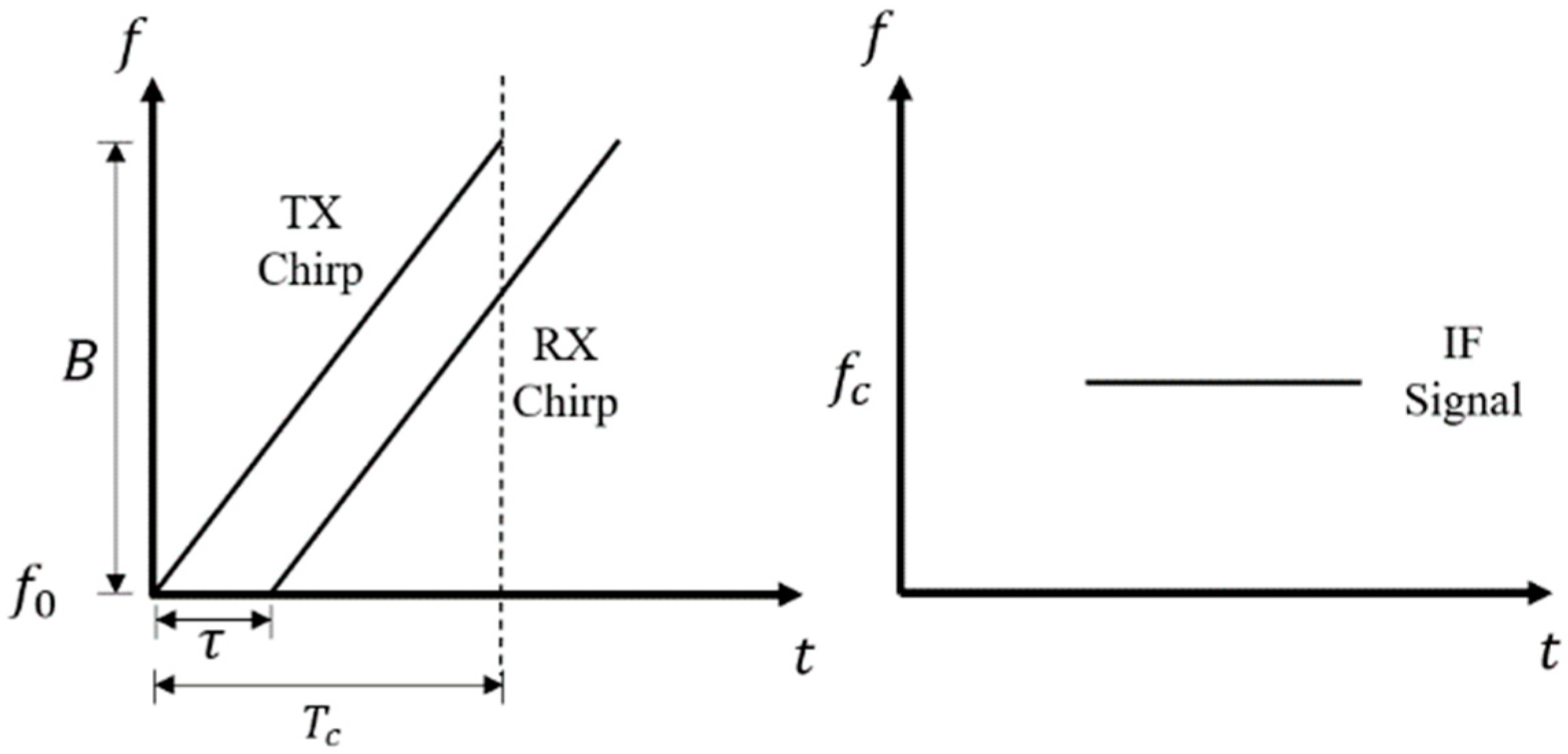
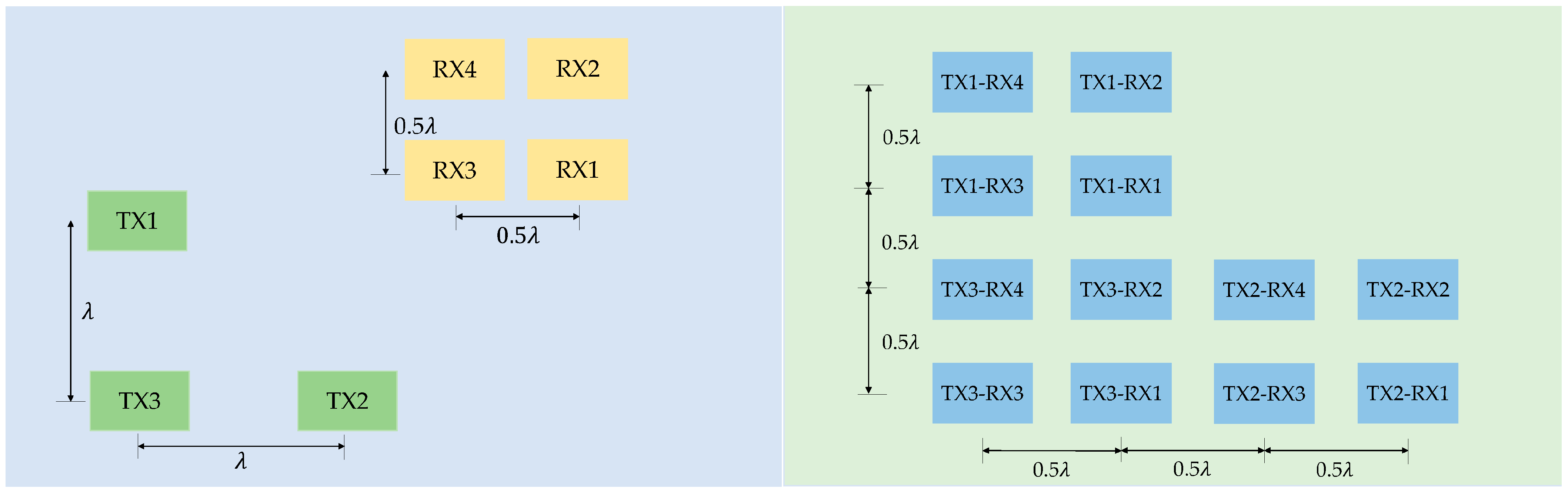
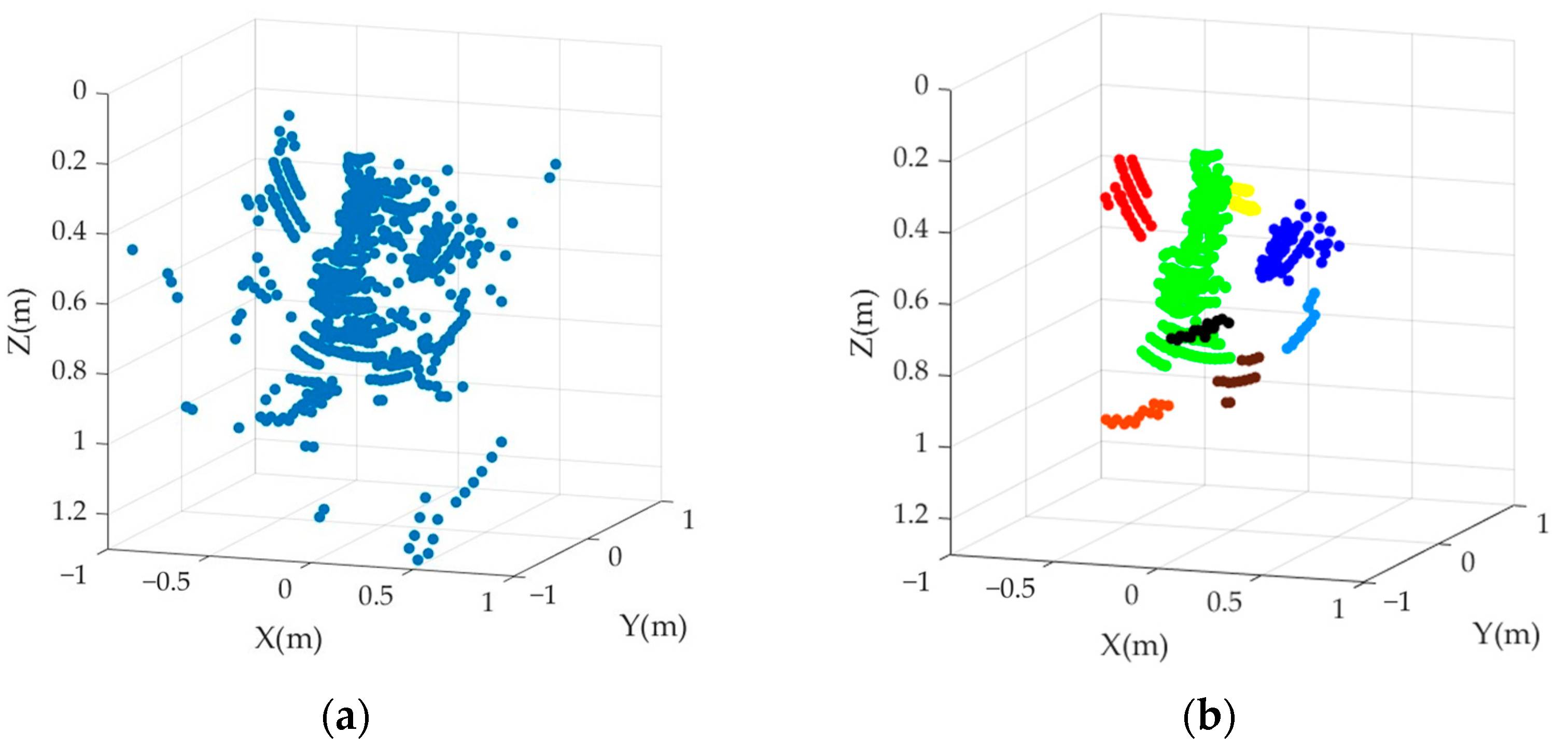
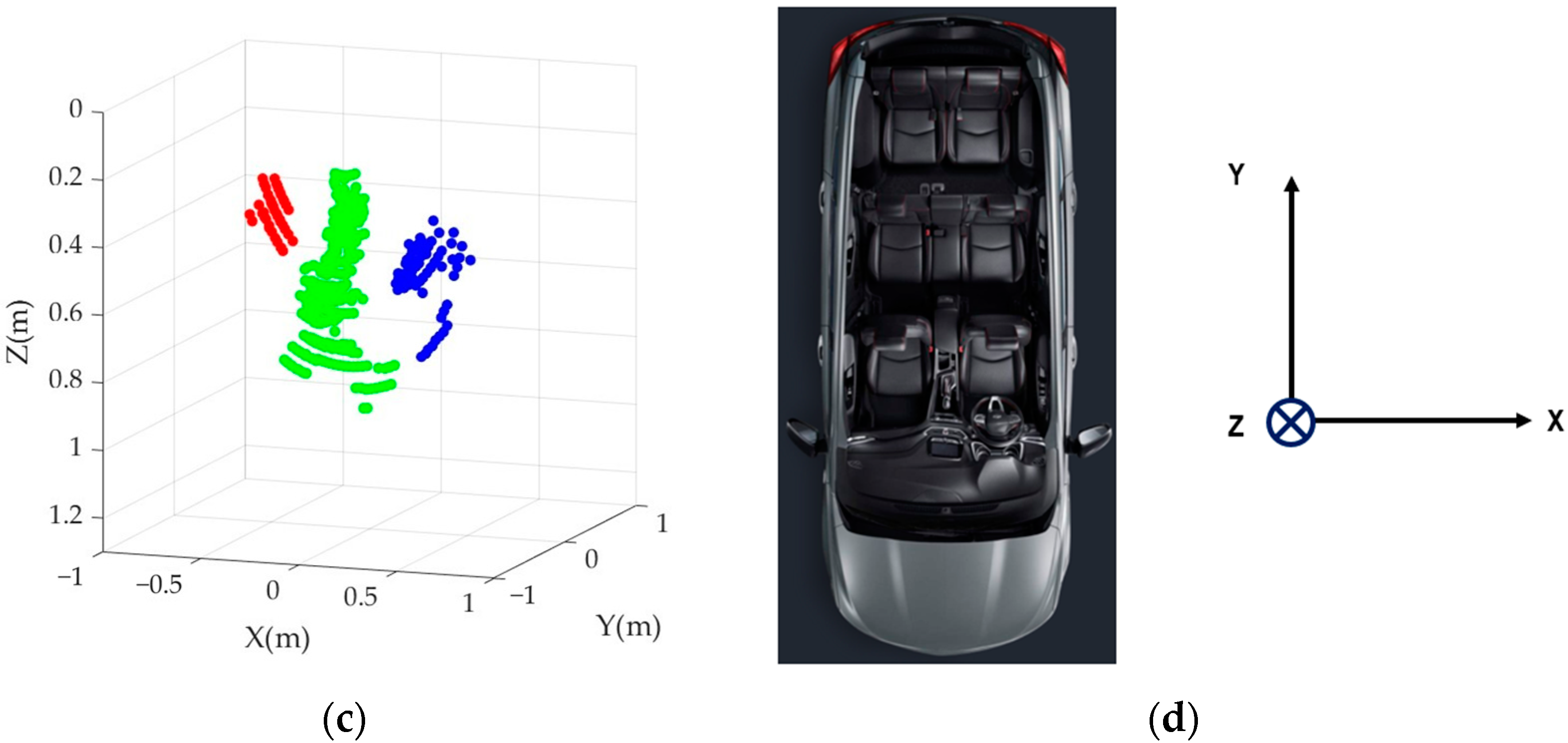
4.1. Point Cloud Generation and Challenges
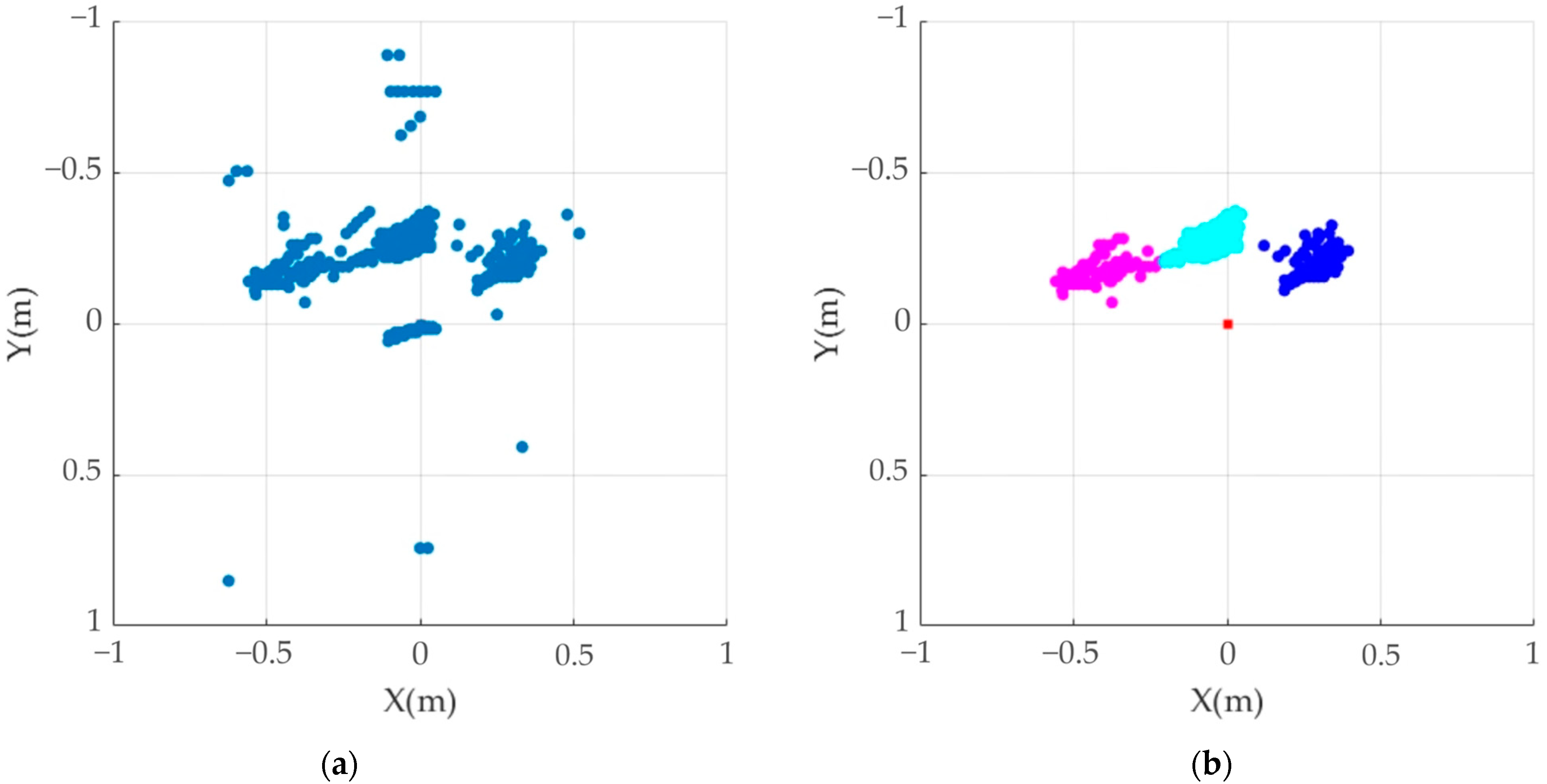
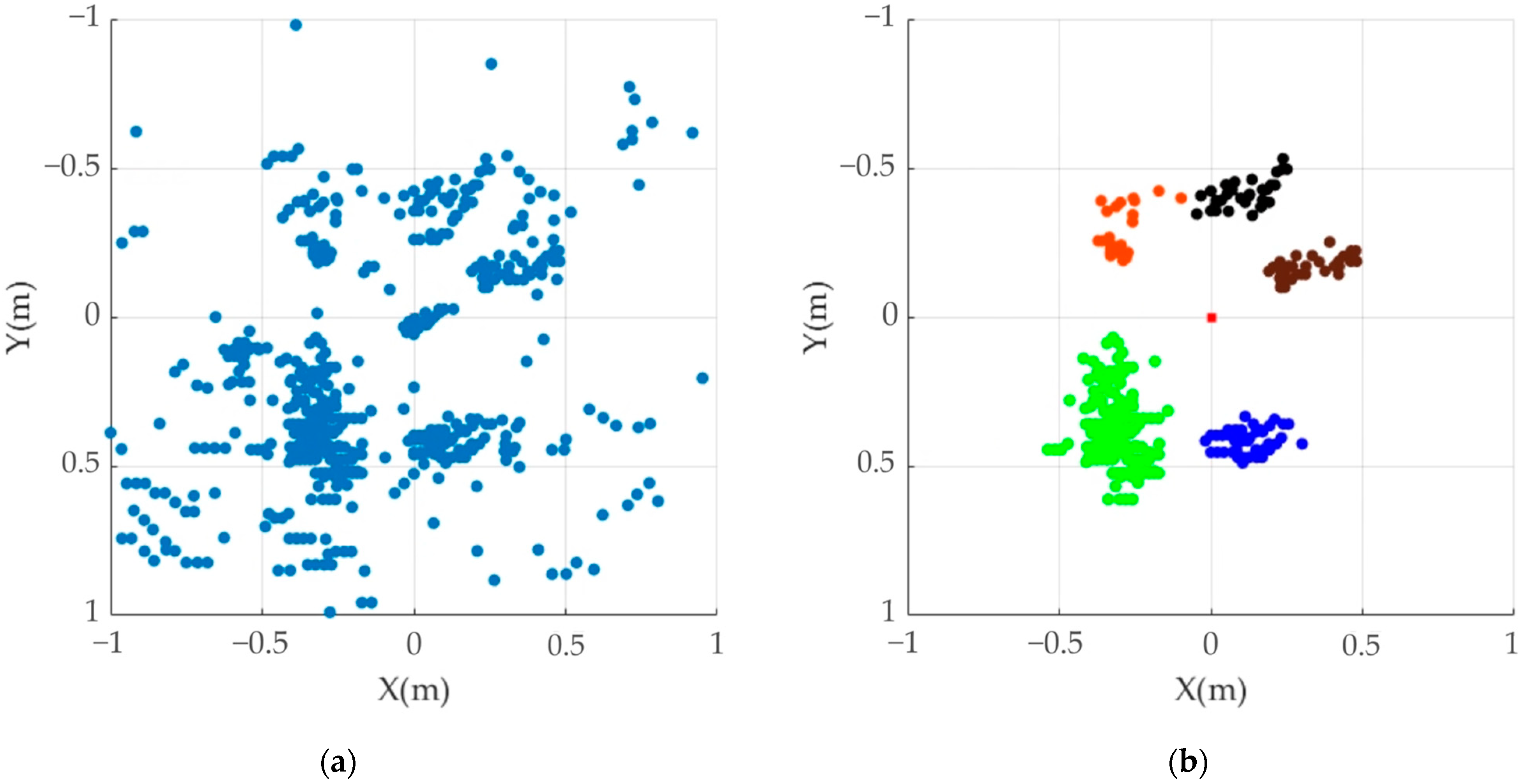
4.2. Point Cloud Clustering Principle
4.2.1. Euclidean Clustering Principle
4.2.2. DBSCAN Principle
4.2.3. K-Means Principle
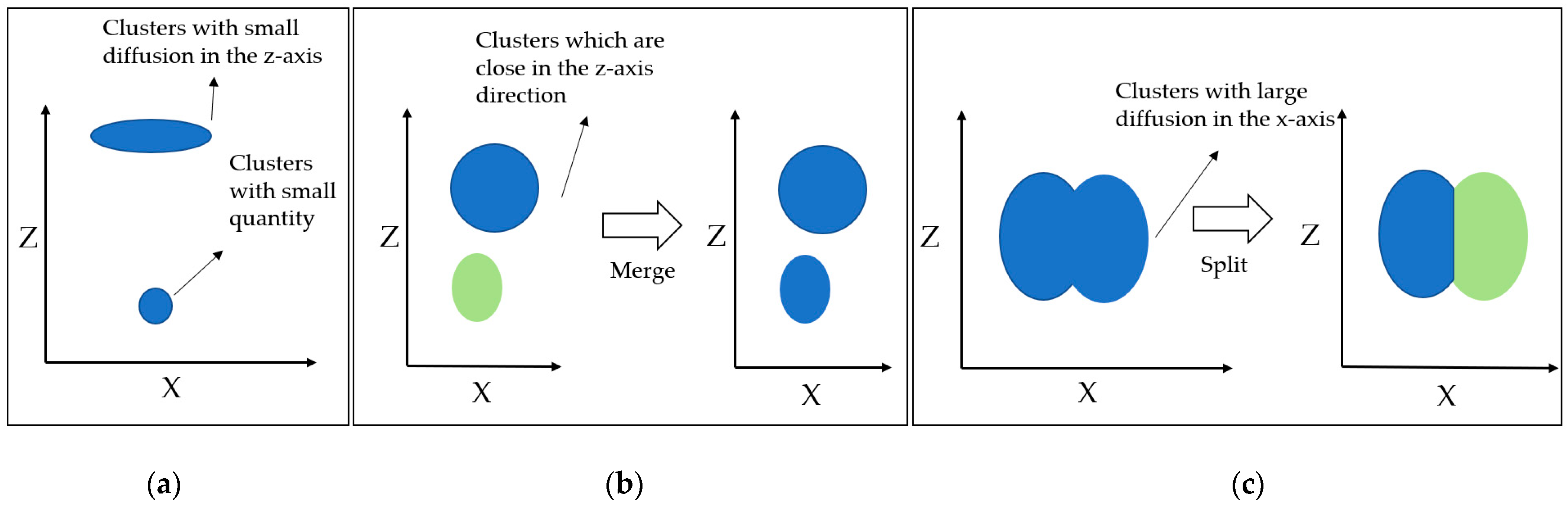
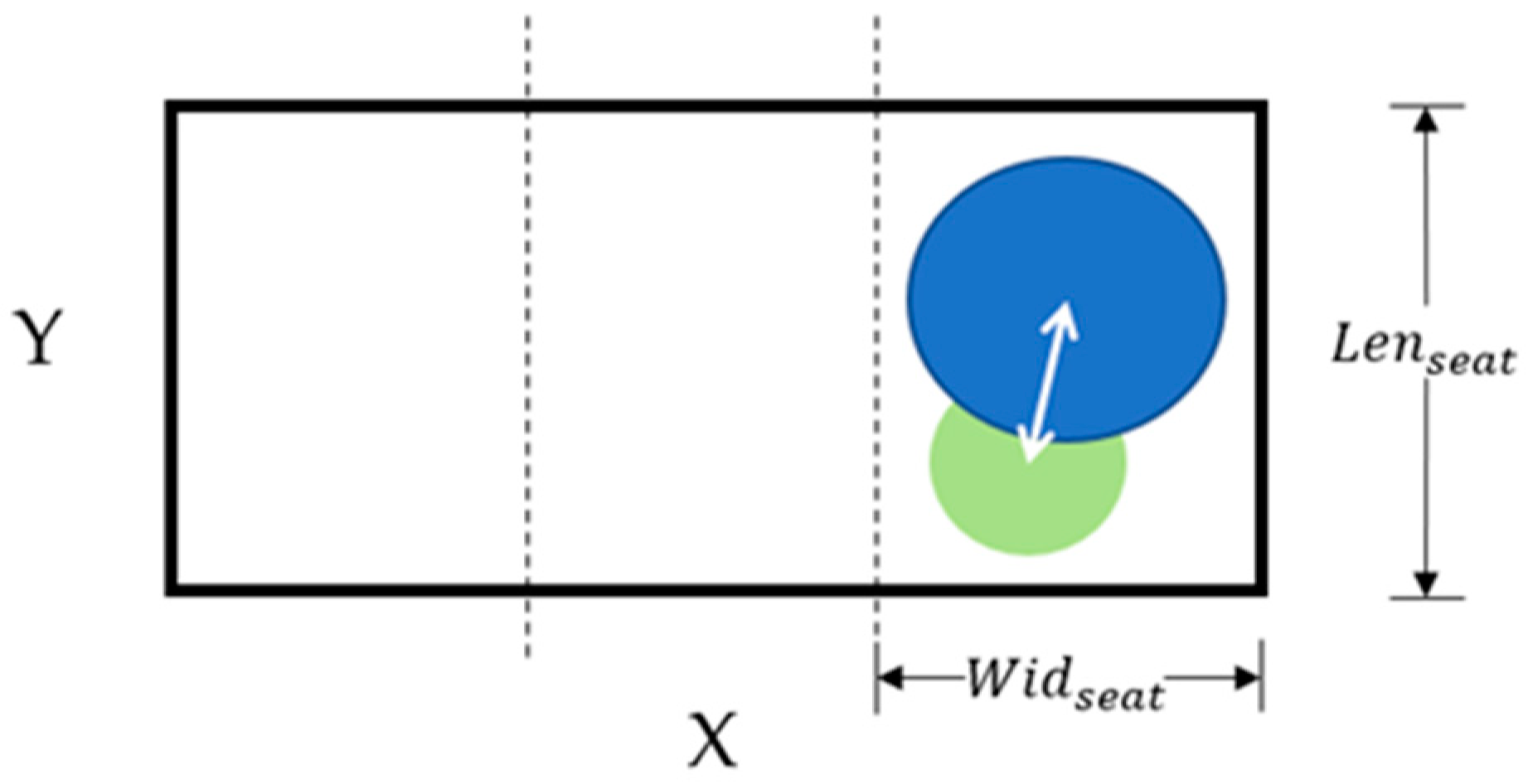
4.2.4. Post-Clustering Processing of Clustered Results
4.3. Presence Detection Based on a State Machine Diagram
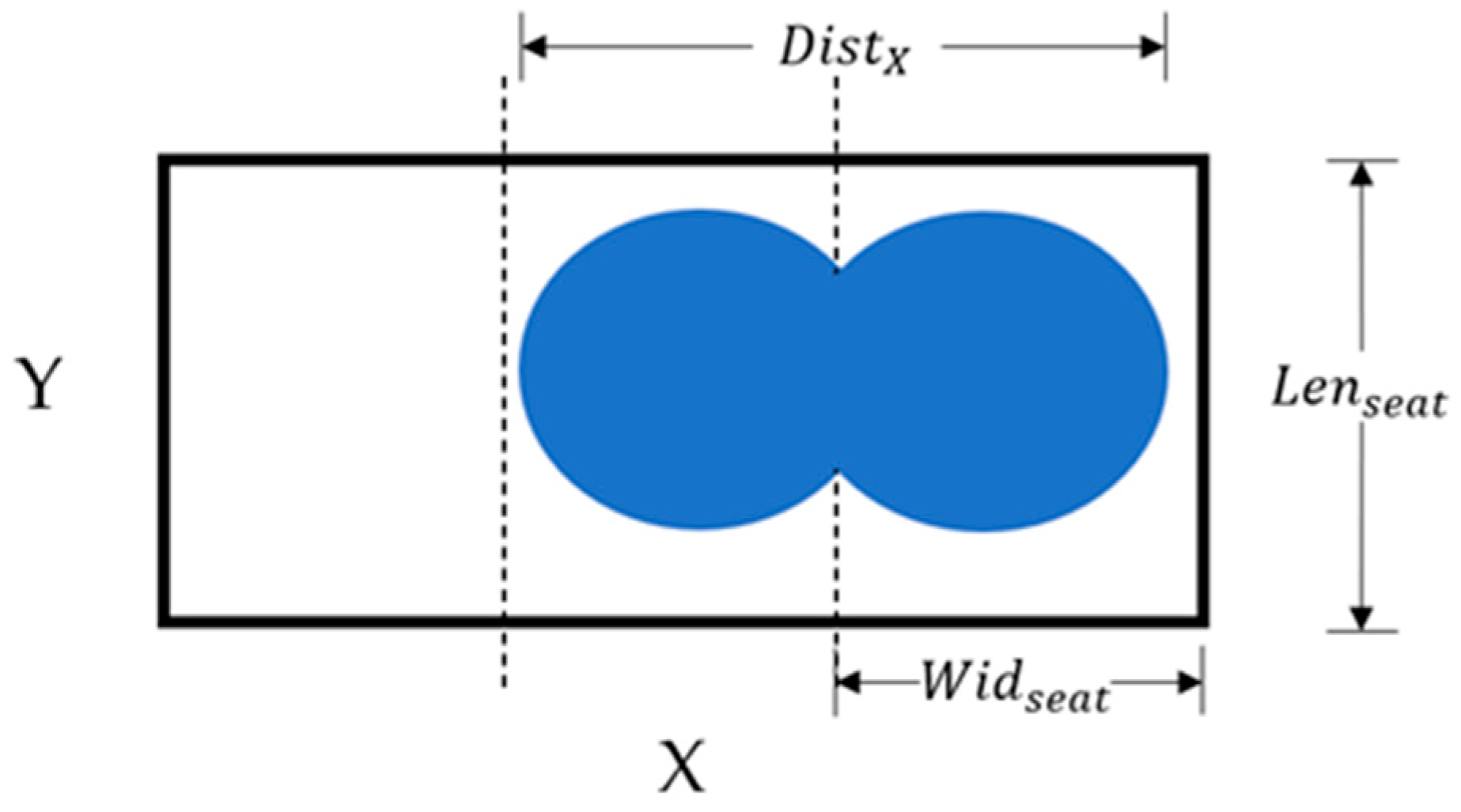
4.3.1. Feature Extraction
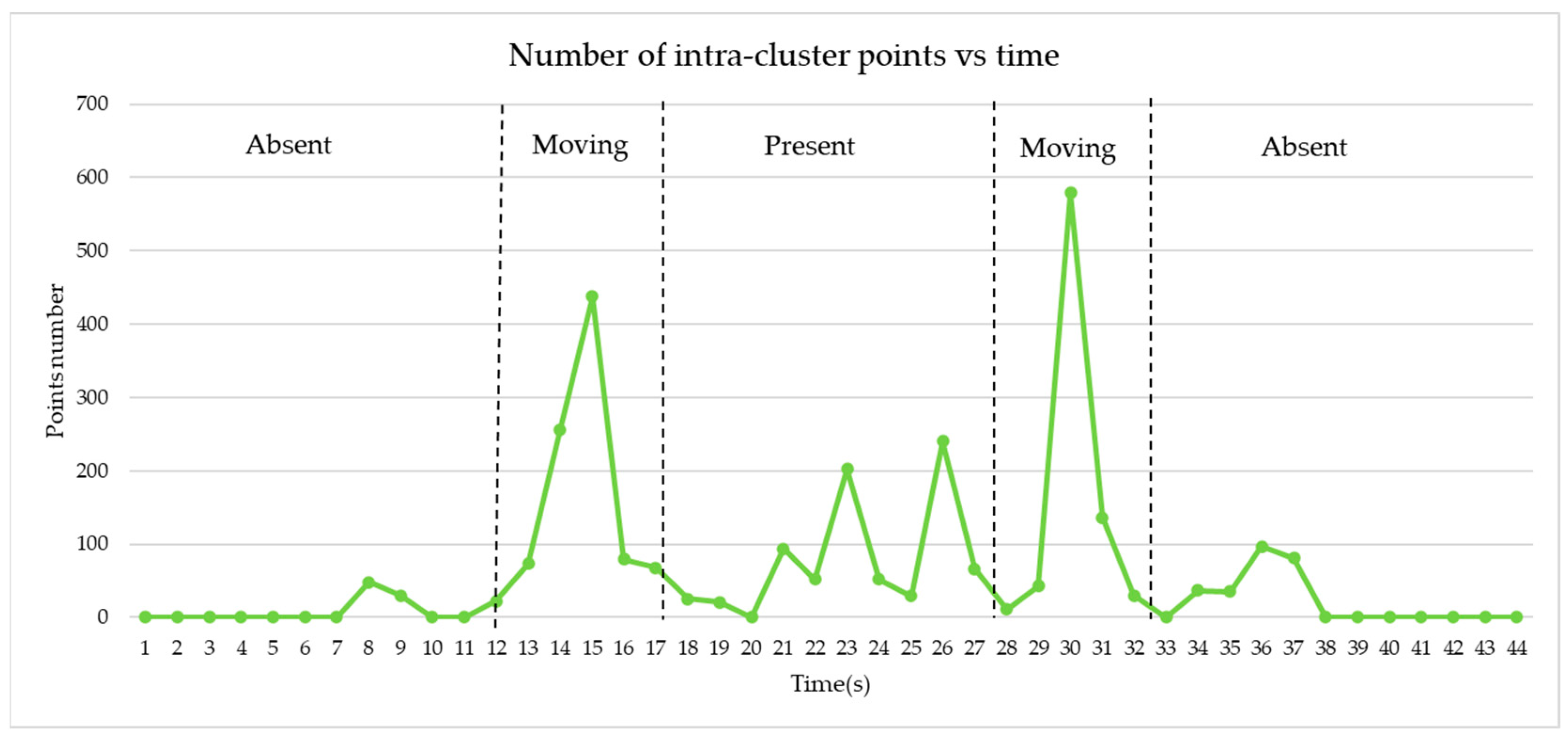
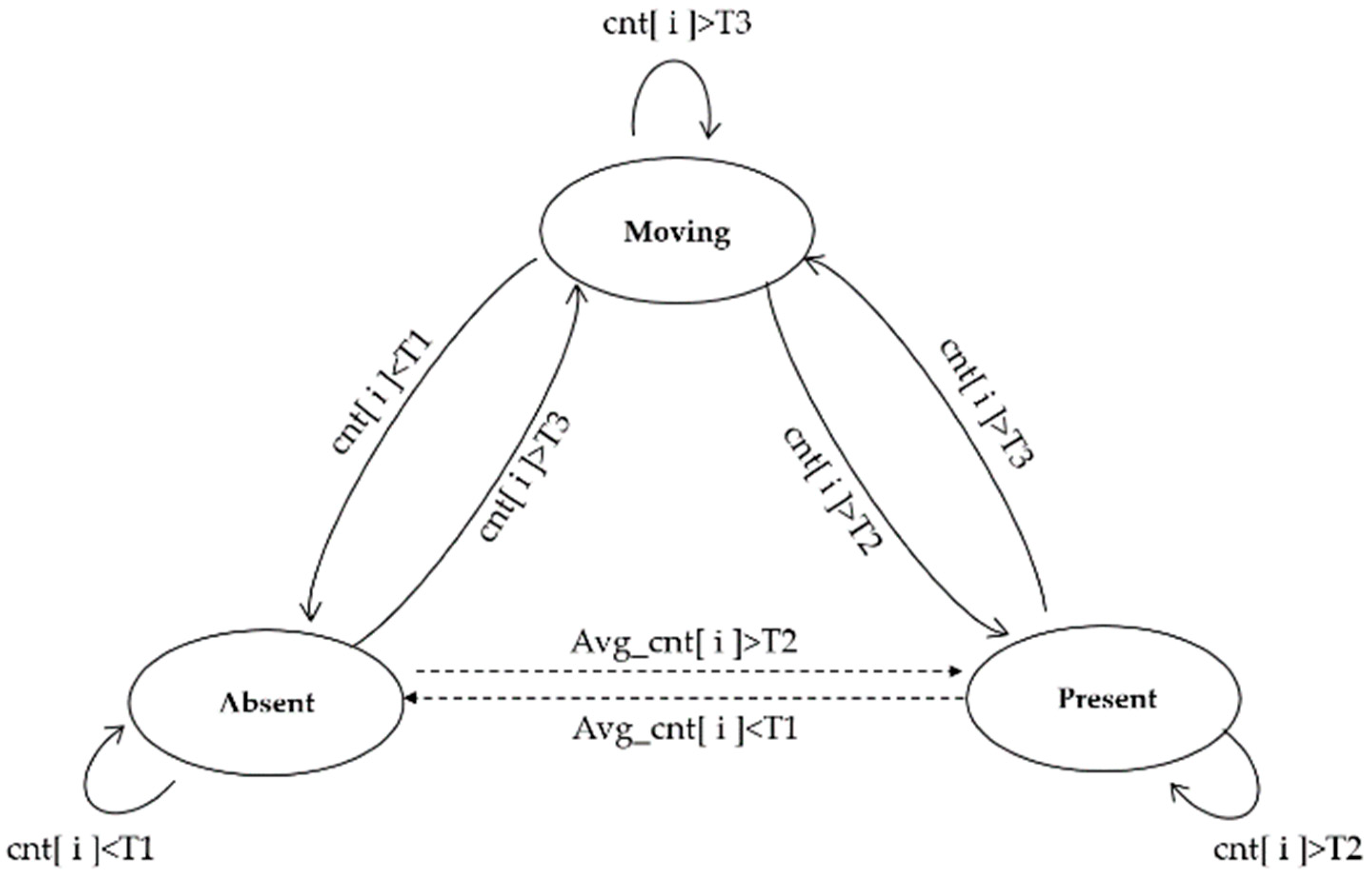
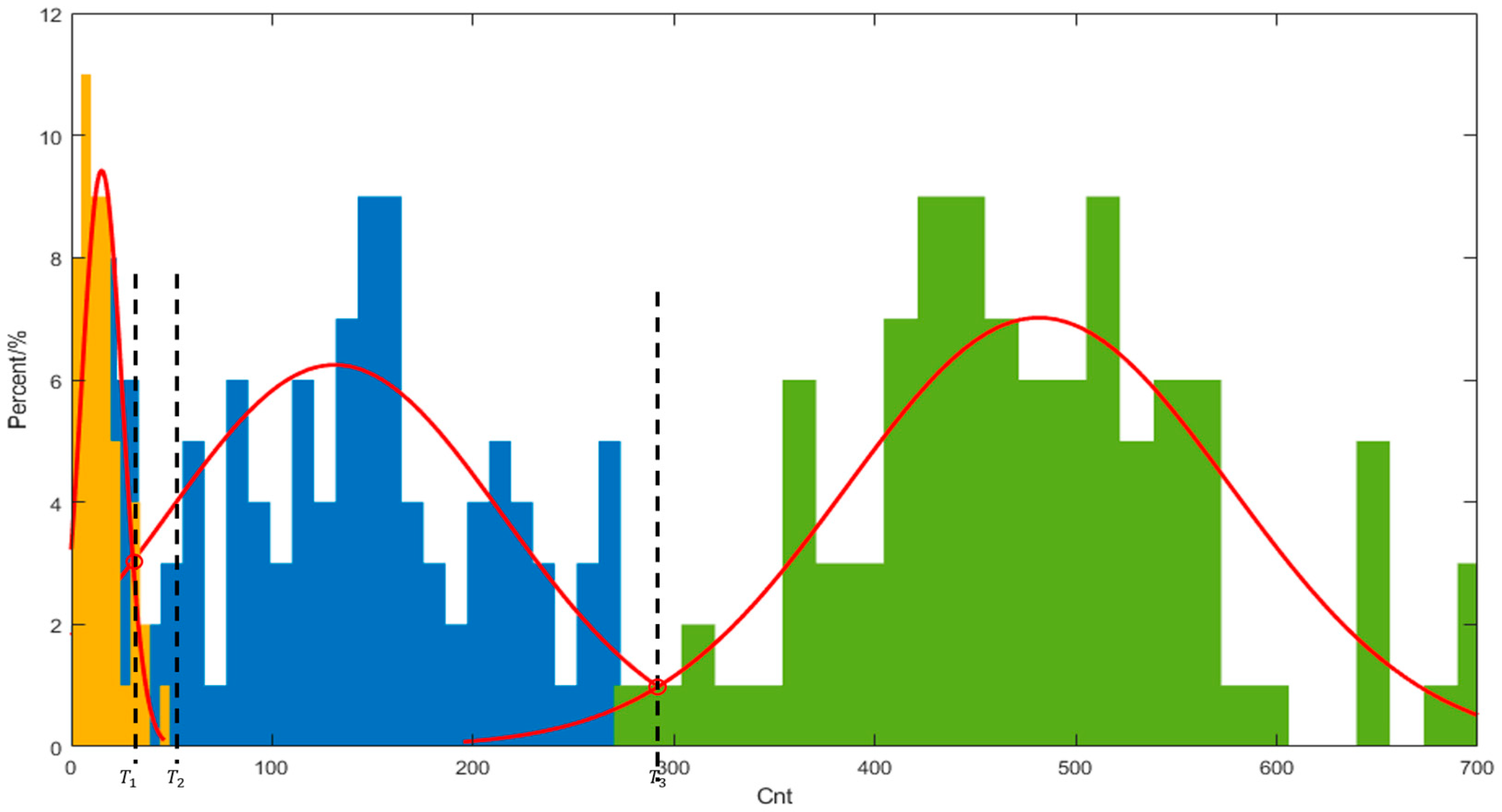
4.3.2. State Machine
| Algorithm 1 Presence detection based on state machine |
| Initialize model parameters |
| if Avg_cnt[i]>T2 then |
| current_state = Present |
| else |
| current_state = Absent |
| while True |
| do |
| if current_state = Present then |
| if cnt[i]>T2 then next_state = Present |
| elseif cnt[i]>T3 then next_state = Moving |
| elseif Avg_cnt[i]<T1 then next_state = Absent |
| elseif current_state = Absent then |
| if cnt[i]<T1 then next_state = Absent |
| elseif cnt[i]>T3 then next_state = Moving |
| elseif Avg_cnt[i]>T2 then next_state = Present |
| elseif current_state = Moving then |
| if cnt[i]>T3 then next_state = Moving |
| elseif cnt[i]>T2 then next_state = Present |
| elseif cnt[i]<T1 then next_state = Absent |
| current_state = next_state |
| endwhile |
5. Experiment and Evaluation
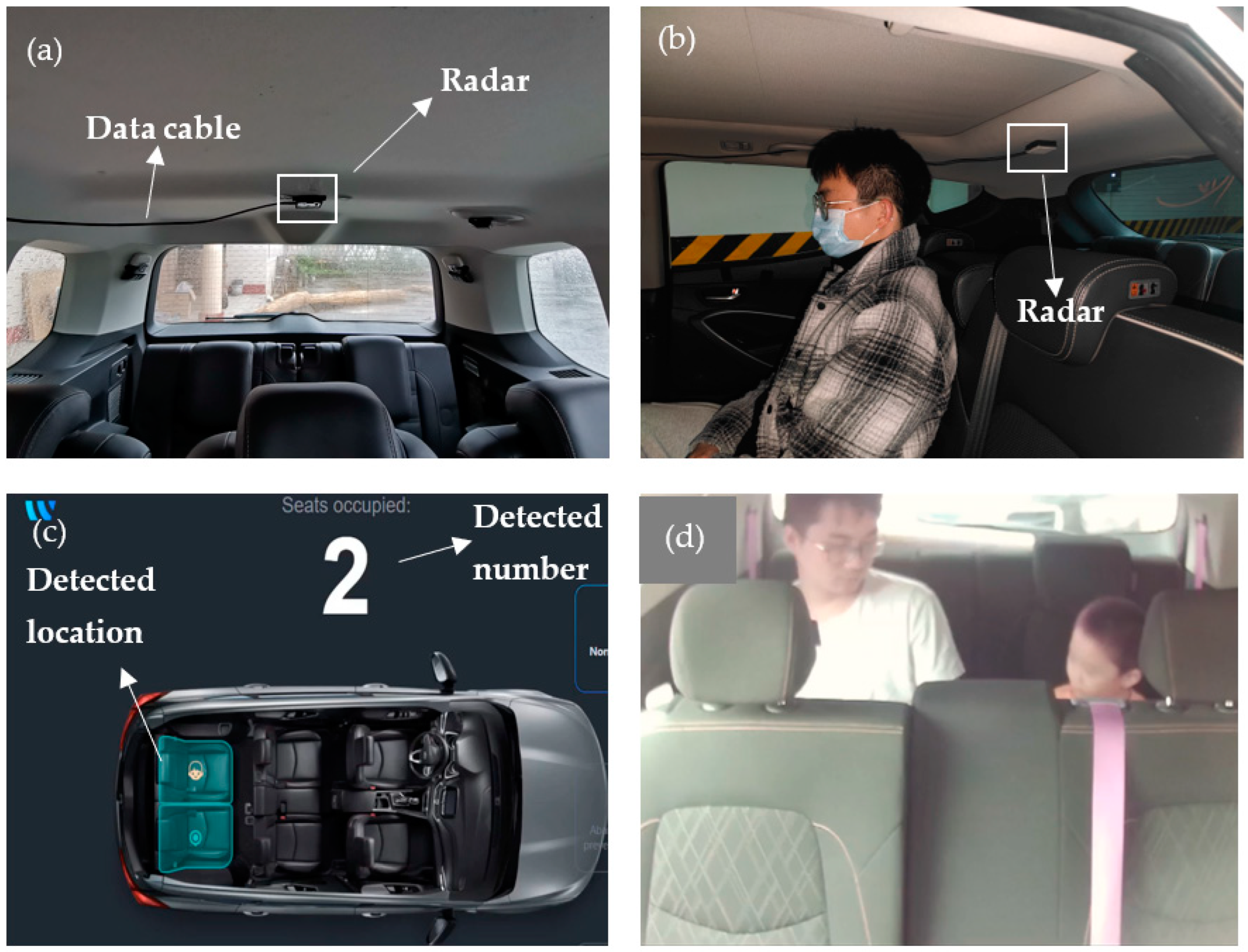
5.1. Experimental Environment and Test Cases for Data Acquisition
5.2. Evaluation Results
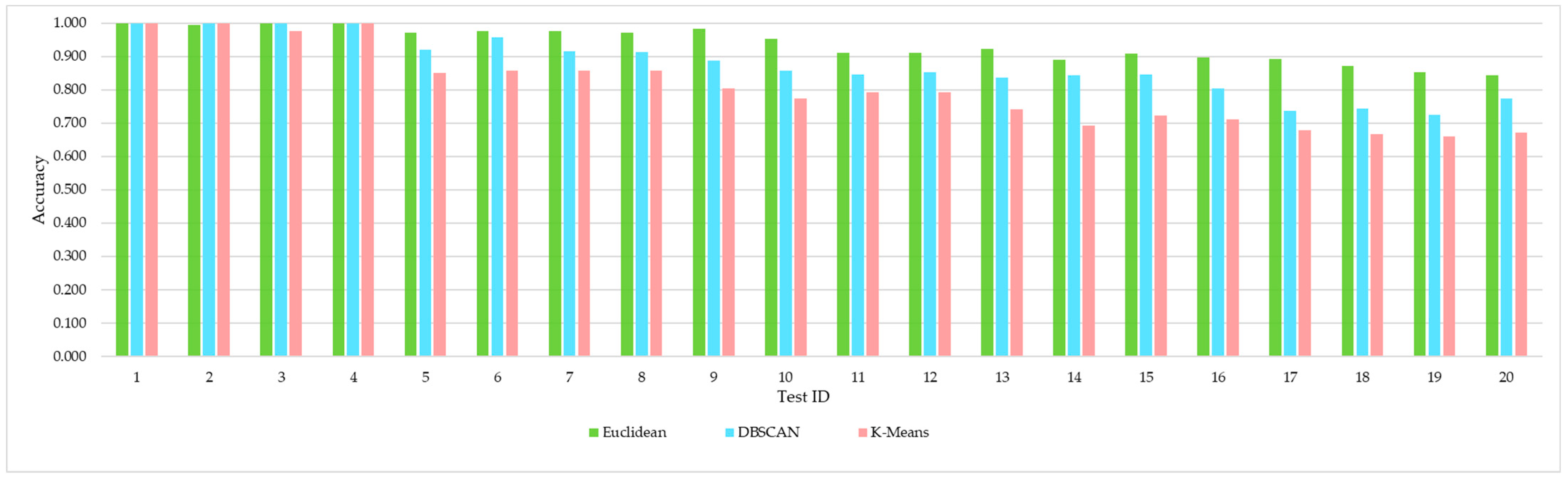
5.2.1. Presence Detection Results of Static Test Cases
5.2.2. Presence Detection Results of Dynamic Test Cases
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Highway Traffic Safety Administration (NHTSA). Motor Vehicle Crash Data Querying and Reporting. Available online: https://cdan.dot.gov/SASStoredProcess/guest (accessed on 24 September 2021).
- Child Hot Car Deaths Data Analysis. Available online: https://www.kidsandcars.org/wp-content/uploads/2020/07/Child-Hot-Car-Deaths-Data-Analysis.pdf (accessed on 5 October 2021).
- Sun, Z.; Chen, S.-K. Automotive Active Safety Systems [Introduction to the special section]. IEEE Control Syst. 2010, 30, 36–37. [Google Scholar]
- Leuven, B. Euro NCAP 2025 Roadmap. Available online: https://cdn.euroncap.com/media/30700/euroncap-roadmap-2025-v4.pdf (accessed on 3 October 2020).
- Tao, L.; Zhang, K.; Tian, H.; Liu, Y.; Wang, D.; Chen, Y.; Yang, Y.; Ren, T. Graphene-Paper Pressure Sensor for Detecting Human Motions. ACS Nano 2017, 11, 8790–8795. [Google Scholar] [CrossRef] [PubMed]
- Márquez-Sánchez, S.; Campero-Jurado, I.; Robles-Camarillo, D.; Rodríguez, S.; Corchado-Rodríguez, J. BeSafe B2.0 Smart Multisensory Platform for Safety in Workplaces. Sensors 2021, 21, 3372. [Google Scholar] [CrossRef] [PubMed]
- Perra, C.; Kumar, A.; Losito, M.; Pirino, P.; Moradpour, M.; Gatto, G. Monitoring Indoor People Presence in Buildings Using Low-Cost Infrared Sensor Array in Doorways. Sensors 2021, 21, 4062. [Google Scholar] [CrossRef] [PubMed]
- Papakis, I.; Sarkar, A.; Svetovidov, A.; Hickman, J.S.; Abbott, A.L. Convolutional Neural Network-Based In-Vehicle Occupant Detection and Classification Method using Second Strategic Highway Research Program Cabin Images. Transp. Res. Rec. 2021, 2675, 443–457. [Google Scholar] [CrossRef]
- Liu, C.; Szirányi, T. Real-Time Human Detection and Gesture Recognition for On-Board UAV Rescue. Sensors 2021, 21, 2180. [Google Scholar] [CrossRef] [PubMed]
- Al-Naji, A.; Al-Askery, A.; Gharghan, S.; Chahl, J. A System for Monitoring Breathing Activity Using an Ultrasonic Radar Detection with Low Power Consumption. J. Sens. Actuator Netw. 2019, 8, 32. [Google Scholar] [CrossRef] [Green Version]
- Jae, H.; Sung, C. Seat Belt Reminder System In Vehicle Using IR-UWB Radar. In Proceedings of the 2018 6th IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Guiyang, China, 22–24 August 2018. [Google Scholar]
- Lim, S.; Jung, J.; Kim, S.; Lee, S. Deep Neural Network-Based In-Vehicle People Localization Using Ultra-Wideband Radar. IEEE Access 2020, 8, 96606–96612. [Google Scholar] [CrossRef]
- Lazaro, A.; Lazaro, M.; Villarino, R.; Girbau, D. Seat-Occupancy Detection System and Breathing Rate Monitoring Based on a Low-Cost Mm-Wave Radar at 60 GHz. IEEE Access 2021, 9, 115403–115414. [Google Scholar] [CrossRef]
- Hyun, E.; Jin, Y.-S.; Park, J.-H.; Yang, J.-R. Machine Learning-Based Human Recognition Scheme Using a Doppler Radar Sensor for In-Vehicle Applications. Sensors 2020, 20, 6202. [Google Scholar] [CrossRef] [PubMed]
- Caddemi, A.; Cardillo, E. Automotive Anti-Abandon Systems: A Millimeter-wave Radar Sensor for the Detection of Child Presence. In Proceedings of the 14th International Conference on Advanced Technologies, Systems and Services in Telecommunications (TELSIKS), Niš, Serbia, 23–25 October 2019. [Google Scholar]
- Song, H.; Youngkeun, Y.; Shin, H. In-Vehicle Passenger Detection Using FMCW Radar. In Proceedings of the International Conference on Information Networking (ICOIN), Jeju Island, Republic of Korea, 13–16 January 2021. [Google Scholar]
- Emanuele, C.; Luigi, F.; Changzhi, L. Microwave and Millimeter-Wave Radar Circuits for the Next Generation Contact-Less In-Cabin Detection. In Proceedings of the 2022 Asia-Pacific Microwave Conference (APMC), Yokohama, Japan, 29 November–2 December 2022. [Google Scholar]
- Diewald, A.R.; Fox, A.; Dimitri, T. Thorough Analysis of Multipath Propagation Effects for Radar Applications in the Vehicle Interior. In Proceedings of the 11th German Microwave Conference (GeMiC), Freiburg, Germany, 12–14 March 2018. [Google Scholar]
- Abedi, H.; Magnier, C.; Mazumdar, V.; Shaker, G. Improving Passenger Safety in Cars Using Novel Radar Signal Processing. Eng. Rep. 2021, 3, e12413. [Google Scholar] [CrossRef]
- Song, H.; Shin, H. Single-Channel FMCW-Radar-Based Multi-Passenger Occupancy Detection Inside Vehicle. Entropy 2021, 23, 1472. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Geng, X.; Lin, Y. Comprehensive mPoint: A Method for 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO mm-Wave Radar. Sensors 2021, 21, 6455. [Google Scholar] [CrossRef] [PubMed]
- Abedi, H.; Luo, S.; Shaker, G. On the Use of Low-Cost Radars and Machine Learning for In-Vehicle Passenger Monitoring. In Proceedings of the IEEE 20th Topical Meeting on Silicon Monolithic Integrated Circuits in RF Systems (SiRF), San Antonio, TX, USA, 26–29 January 2020. [Google Scholar]
- 60GHz mmWave Sensor EVMs (Rev. E). Available online: https://www.ti.com/lit/ug/swru546e/swru546e.pdf?ts=1678516150321&ref_url=https%253A%252F%252Fwww.ti.com%252Ftool%252FIWR6843ISK (accessed on 24 March 2021).
- Child-Presence and Occupant-Detection Reference Design Using 60-GHz Antenna-on-Package MmWave Sensor. Available online: https://www.ti.com.cn/cn/lit/ug/tiduey3/tiduey3.pdf?ts=1640230645441&ref_url=https%253A%252F%252Fwww.ti.com.cn%252Ftool%252Fcn%252FTIDEP-01023 (accessed on 16 May 2021).
- Zhao, A.; Jiang, H.; Li, S. Improved Capon Estimators for DOD and DOA Estimation in Large Array MIMO Radar: A Random Matrix Method. In Proceedings of the IEEE Radar Conference (RadarConf’18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1140–1145. [Google Scholar]
- Wen, L.; He, L.; Gao, Z. Research on 3D Point Cloud De-Distortion Algorithm and Its Application on Euclidean Clustering. IEEE Access 2019, 7, 86041–86053. [Google Scholar] [CrossRef]
- Ram, A.; Jalal, S.; Jalal, A.; Kumar, M. A Density Based Algorithm for Discovering Density Varied Clusters in Large Spatial Databases. Int. J. Comput. Appl. 2010, 3, 1–4. [Google Scholar] [CrossRef]
- Callow, J.; May, S.; Leopold, M. Drone Photogrammetry and K-Means Point Cloud Filtering to Create High Resolution Topographic and Inundation Models of Coastal Sediment Archives. Earth Surf. Process. Landf. 2018, 43, 2603–2615. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Technology | Sensor Type | Feature and problems |
|---|---|---|---|
| Contact | Embedded | Pressure sensor [5] | Uses an embedded pressure sensor for estimating the weight on a seat, but it cannot distinguish between heavy objects and human bodies. |
| Wearable | Motion sensor [6] | Uses machine learning models for human movements recognition, which is inconvenient to operate. | |
| Non-contact | Non-radar based | Infrared sensor [7] | Uses a pattern recognition algorithm for detecting the presence of people in indoor environments, but it cannot detect fixed people. |
| Camera [8] | Uses DNN for in-vehicle occupant presence detection, but its result is heavily influenced by the light factor. Moreover, privacy is a problem. | ||
| Thermal image sensor [9] | Uses thermal imaging methods to determine the presence of a person and uses image density for estimating the number of persons. Its cost is high. | ||
| Ultrasonic sensor [10] | Used for obtaining vital sign information of static targets; however, it cannot easily handle dynamic targets. | ||
| Radar-based | Ultra-wide band radar [11,12] | Uses signal processing techniques for measurement of vital signs such as respiration and heart rate monitoring. It is characterized by high computational complexity and high cost. | |
| Pulsed coherent radar [13] | Uses vital signs for identifying living organisms in the car. It has experimented with baby simulators. | ||
| Continuous wave radar [14] | Uses micro-Doppler and neural networks for classification of occupancy in vehicles. Its results may be influenced by a person’s movement. | ||
| FMCW [15,16,17,18,19,20,21,22] | Uses two types of features, i.e., respiratory signs of a person and output of angle-of-arrival (AoA) algorithms, for classification of occupancy in vehicles. Neural network methods are commonly applied to it. The problem is that it requires enormous computation, thus making it difficult to implement in radar chips. |
| Participant | Height (cm) | Weight (kg) | Age (Years Old) | Gender |
|---|---|---|---|---|
| Adult A | 178 | 60 | 24 | Male |
| Adult B | 175 | 55 | 23 | Male |
| Adult C | 165 | 50 | 23 | Female |
| Child A | 139 | 31 | 9 | Female |
| Child B | 118 | 26 | 6 | Male |
| Use Cases | Detection Accuracy (%) | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Euclidean | DBSCAN | K-Means | ||||||||||||||
| Test ID | Number of People—Sitting Posture | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 |
| 1 | 1-normal | 100.0 | 100.0 | 100.0 | ||||||||||||
| 2 | 1-leaning forward | 100.0 | 100.0 | 100.0 | ||||||||||||
| 3 | 1-leaning left | 100.0 | 100.0 | 97.6 | 2.4 | |||||||||||
| 4 | 1-leaning right | 100.0 | 100.0 | 100.0 | ||||||||||||
| 5 | 2-normal | 100.0 | 8.0 | 92.0 | 13.1 | 85.1 | 1.8 | |||||||||
| 6 | 2-leaning forward | 97.6 | 2.4 | 4.4 | 95.6 | 1.3 | 85.7 | 13.0 | ||||||||
| 7 | 2-leaning left | 0.6 | 97.6 | 1.8 | 7.8 | 91.6 | 0.6 | 0.6 | 85.6 | 13.8 | ||||||
| 8 | 2-leaning right | 97.1 | 2.9 | 8.6 | 91.4 | 14.4 | 85.6 | |||||||||
| 9 | 3-normal | 3.6 | 96.4 | 11.3 | 88.7 | 19.6 | 80.4 | |||||||||
| 10 | 3-leaning forward | 2.6 | 95.2 | 2.2 | 14.3 | 85.7 | 21.4 | 77.4 | 1.2 | |||||||
| 11 | 3-leaning left | 3.6 | 92.9 | 3.6 | 15.5 | 84.5 | 17.3 | 79.2 | 3.6 | |||||||
| 12 | 3-leaning right | 4.6 | 92.3 | 3.1 | 13.0 | 85.2 | 1.8 | 16.6 | 79.3 | 4.1 | ||||||
| 13 | 4-normal | 5.4 | 92.2 | 2.4 | 16.3 | 83.7 | 23.5 | 74.1 | 2.4 | |||||||
| 14 | 4-leaning forward | 6.8 | 90.2 | 3.0 | 3.0 | 12.7 | 84.3 | 0.7 | 27.0 | 69.3 | 3.0 | |||||
| 15 | 4-leaning left | 1.2 | 5.6 | 90.7 | 2.5 | 4.6 | 10.8 | 84.6 | 0.8 | 24.5 | 72.2 | 2.5 | ||||
| 16 | 4-leaning right | 5.9 | 89.7 | 4.4 | 7.8 | 11.9 | 80.4 | 1.9 | 71.0 | 27.1 | ||||||
| 17 | 5-normal | 10.7 | 89.3 | 5.0 | 21.3 | 73.7 | 15.4 | 16.7 | 67.9 | |||||||
| 18 | 5-leaning forward | 3.2 | 9.6 | 87.2 | 9.2 | 16.4 | 74.4 | 5.3 | 13.4 | 14.6 | 66.7 | |||||
| 19 | 5-leaning left | 5.1 | 9.6 | 85.3 | 8.6 | 19.0 | 72.4 | 0.7 | 13.7 | 19.6 | 66.0 | |||||
| 20 | 5-leaning right | 7.5 | 8.2 | 84.2 | 5.8 | 16.8 | 77.4 | 14.7 | 18.2 | 67.1 | ||||||
| Use Cases | Detection Accuracy (%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| No Cluster Post-Processing | Cluster Post-Processing | ||||||||||
| Test ID | Number of People—Sitting Posture | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 |
| 1 | 1-normal | 100.0 | 100.0 | ||||||||
| 2 | 1-leaning forward | 100.0 | 100.0 | ||||||||
| 3 | 1-leaning left | 100.0 | 100.0 | ||||||||
| 4 | 1-leaning right | 100.0 | 100.0 | ||||||||
| 5 | 2-normal | 100.0 | 100.0 | ||||||||
| 6 | 2-leaning forward | 97.6 | 2.4 | 98.5 | 1.5 | ||||||
| 7 | 2-leaning left | 0.6 | 97.6 | 1.8 | 0.3 | 98.3 | 1.4 | ||||
| 8 | 2-leaning right | 97.1 | 2.9 | 0.2 | 97.8 | 2.0 | |||||
| 9 | 3-normal | 3.6 | 96.4 | 1.8 | 97.6 | 0.6 | |||||
| 10 | 3-leaning forward | 2.6 | 95.2 | 2.2 | 1.4 | 96.0 | 2.6 | ||||
| 11 | 3-leaning left | 3.6 | 92.9 | 3.6 | 2.7 | 94.2 | 3.1 | ||||
| 12 | 3-leaning right | 4.6 | 92.3 | 3.1 | 3.3 | 93.5 | 3.2 | ||||
| 13 | 4-normal | 5.4 | 92.2 | 2.4 | 3.2 | 92.6 | 4.2 | ||||
| 14 | 4-leaning forward | 6.8 | 90.2 | 3.0 | 5.5 | 92.7 | 1.8 | ||||
| 15 | 4-leaning left | 1.2 | 5.6 | 90.7 | 2.5 | 4.5 | 93.1 | 2.4 | |||
| 16 | 4-leaning right | 5.9 | 89.7 | 4.4 | 2.6 | 92.4 | 5.0 | ||||
| 17 | 5-normal | 10.7 | 89.3 | 4.6 | 4.8 | 90.6 | |||||
| 18 | 5-leaning forward | 3.2 | 9.6 | 87.2 | 3.4 | 5.9 | 90.7 | ||||
| 19 | 5-leaning left | 5.1 | 9.6 | 85.3 | 3.7 | 5.2 | 91.1 | ||||
| 20 | 5-leaning right | 7.5 | 8.2 | 84.2 | 3.8 | 5.8 | 90.4 | ||||
| Use Cases | Detection Accuracy(%) | |||||
|---|---|---|---|---|---|---|
| Test ID | Number of People Movement | 1 | 2 | 3 | 4 | 5 |
| 1 | 1-Boarding and alighting | 100.0 | ||||
| 2 | 1-Rocking in the seat | 100.0 | ||||
| 3 | 2-Boarding and alighting | 3.6 | 96.4 | |||
| 4 | 2-Rocking in the seat | 1.0 | 97.8 | 1.2 | ||
| 5 | 3-Boarding and alighting | 3.7 | 93.4 | 2.9 | ||
| 6 | 3-Rocking in the seat | 5.4 | 93.5 | 1.2 | ||
| 7 | 4-Boarding and alighting | 4.7 | 91.6 | 3.7 | ||
| 8 | 4-Rocking in the seat | 5.1 | 91.7 | 3.2 | ||
| 9 | 5-Boarding and alighting | 2.9 | 8.8 | 88.3 | ||
| 10 | 5-Rocking in the seat | 3.6 | 7.3 | 89.1 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Luo, Y.; Ma, J.; Qi, A.; Huang, R.; De Paulis, F.; Qi, Y. Non-Contact In-Vehicle Occupant Monitoring System Based on Point Clouds from FMCW Radar. Technologies 2023, 11, 39. https://doi.org/10.3390/technologies11020039
Chen Y, Luo Y, Ma J, Qi A, Huang R, De Paulis F, Qi Y. Non-Contact In-Vehicle Occupant Monitoring System Based on Point Clouds from FMCW Radar. Technologies. 2023; 11(2):39. https://doi.org/10.3390/technologies11020039
Chicago/Turabian StyleChen, Yixuan, Yunlong Luo, Jianhua Ma, Alex Qi, Runhe Huang, Francesco De Paulis, and Yihong Qi. 2023. "Non-Contact In-Vehicle Occupant Monitoring System Based on Point Clouds from FMCW Radar" Technologies 11, no. 2: 39. https://doi.org/10.3390/technologies11020039
APA StyleChen, Y., Luo, Y., Ma, J., Qi, A., Huang, R., De Paulis, F., & Qi, Y. (2023). Non-Contact In-Vehicle Occupant Monitoring System Based on Point Clouds from FMCW Radar. Technologies, 11(2), 39. https://doi.org/10.3390/technologies11020039