


Optimal Selection of Conductor Sizes in Three-Phase Asymmetric Distribution Networks Considering Optimal Phase-Balancing: An Application of the Salp Swarm Algorithm




Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimal Conductor Selection | |||
|---|---|---|---|
| Solution Methodology | Objective Function | Year | Reference |
| Heuristic index directed method | Minimization of operating costs | 2000 | [14] |
| Constructive heuristic algorithm | Minimization of operating costs | 2002, 2017 | [27,28] |
| Harmony search algorithm | Minimization of operating costs | 2011 | [29] |
| Elitist non-dominated sorting algorithm | Minimization of operating costs | 2011 | [30] |
| Particle swarm optimization | Minimization of operating costs | 2012 | [31] |
| Genetic algorithm | Minimization of operating costs | 2013 | [32] |
| Bacterial search algorithm | Minimization of operating costs | 2015 | [33] |
| Imperialism competitive algorithm | Minimization of operating costs | 2015 | [33] |
| Sine-cosine optimization algorithm | Minimization of operating costs | 2017 | [34] |
| Crow search algorithm | Minimization of operating costs | 2017 | [35] |
| Tabu search algorithm | Minimization of operating costs | 2018, 2021 | [17,21] |
| Exact MINLP solution | Minimization of operating costs | 2018, 2021 | [17,36] |
| Branch wise minimization technique | Minimization of operating costs | 2018 | [19] |
| Whale optimization algorithm | Minimization of operating costs | 2019 | [18] |
| Evaporation rate water cycle algorithm | Minimization of operating costs | 2021 | [20] |
| Vortex search algorithm | Minimization of operating costs | 2021 | [13] |
| Optimal Phase-Balancing | |||
| Solution Methodology | Objective Function | Year | Reference |
| Simulated annealing algorithm | Minimization of power losses | 1999 | [15] |
| Genetic algorithm | Minimization of phase unbalance | 1999 | [37] |
| Chu & Beasley genetic algorithm | Minimization of power losses | 2004, 2012 | [10,25,38,39,40] |
| 2019, 2021, 2021 | |||
| Ant colony optimization algorithm | Minimization of energy costs | 2005 | [41] |
| Particle swarm optimization algorithm | Minimization of phase unbalance | 2006, 2018 | [42,43] |
| Immune optimization algorithm | Minimization of operating costs | 2008 | [44] |
| Differential evolution algorithm | Minimization of power losses | 2012 | [45] |
| Bacterial foraging algorithm | Minimization of power losses | 2012 | [46] |
| Vortex search algorithm | Minimization of power losses | 2021 | [10] |
| Mixed-integer conic reformulation | Minimization of power losses | 2021 | [22] |
| Crow search algorithm | Minimization of power losses | 2021 | [23] |
| Sine and cosine algorithm | Minimization of power losses | 2021 | [26] |
| Mixed-integer convex approximation | Minimization of average unbalance | 2021 | [47] |
| Mixed-integer convex model | Minimization of power losses | 2021 | [48] |
| Hurricane-based optimization algorithm | Minimization of power losses | 2022 | [24] |
- A new Mixed-Integer Nonlinear Programming (MINLP) model that represents the optimal conductor selection problem in asymmetric three-phase distribution systems considering an optimal phase-balancing.
- A new master–slave methodology to solve the proposed exact MINLP model. The master stage uses a discrete version of the SSA to define the set of conductors to be installed in all the network segments, as well as the phase connections at all the demand nodes that make up the system. The slave stage employs the three-phase version of the backward/forward sweep power flow method to determine the feasibility of each solution and the operating costs of the network over a year of operation.
- A new master-slave methodology that increases the possibility of finding a global optimum by solving the problem under analysis simultaneously—rather than separately or in stages—thus preventing the algorithm from falling into local optima.
2. Mathematical Formulation
2.1. Formulation of the Objective Function
2.2. Set of Constraints
- The first component in the objective function (i.e., ) defines the total investment and operating costs of the distribution system plan. Said component is affected by the network’s final voltage profiles, which clearly depend on the conductors selected for each distribution line as well as the final load connection. In addition, the components in the objective function that represent the investment in conductors and the cost balance (i.e., components and ) are also directly related to the type of conductors selected for each distribution line and the number of interventions required in the distribution network to reduce the load imbalance.
- The power balance constraint defined in Equation (5) is the most complicated constraint in this optimization problem since it represents the nonlinear non-convex relation between voltages and demand consumption. However, note that this set of constraints is dependent on the nodal admittance matrix, which is in turn defined as a function of the calibers selected for all the distribution lines.
- The verification of the feasibility of the solution space (regarding the current capabilities of the selected conductors) depends on the expected current flow in all the branches of the network (see Equation (6)). However, to calculate such feasibility, it is mandatory to solve the power balance constraints in (5). This implies that the model represents a complex MINLP model with intrinsic and implicit relations between all the constraints. For this reason, it is necessary to implement efficient solution techniques that enable us to deal with the complexities of the model via sequential programming.
2.3. Model Interpretation
- The presence of nonlinearities and nonconvexities in the complex power balance equation.
- The combination of binary and integer variables.
- The need to recalculate the power demand for each combination of phase connections.
- The need to recalculate the three-phase impedance matrix for each combination of conductor sizes.
3. Proposed Solution Methodology
3.1. Proposed Coding
3.2. Master Stage: Salp Swarm Algorithm
3.2.1. Initial Population
3.2.2. Salp Chain Movement
- Case 1: Movement with respect to the leader’s position
- 2.
- Case 2: Movement based on the principles of classical mechanics
3.2.3. Updating the Leader
| Algorithm 1 Salp swarm algorithm used to solve optimization problems. |
 |
3.3. Slave Stage: Formulation of the Three-Phase Power Flow Method
3.3.1. Modeling the Components of the Three-Phase Distribution System
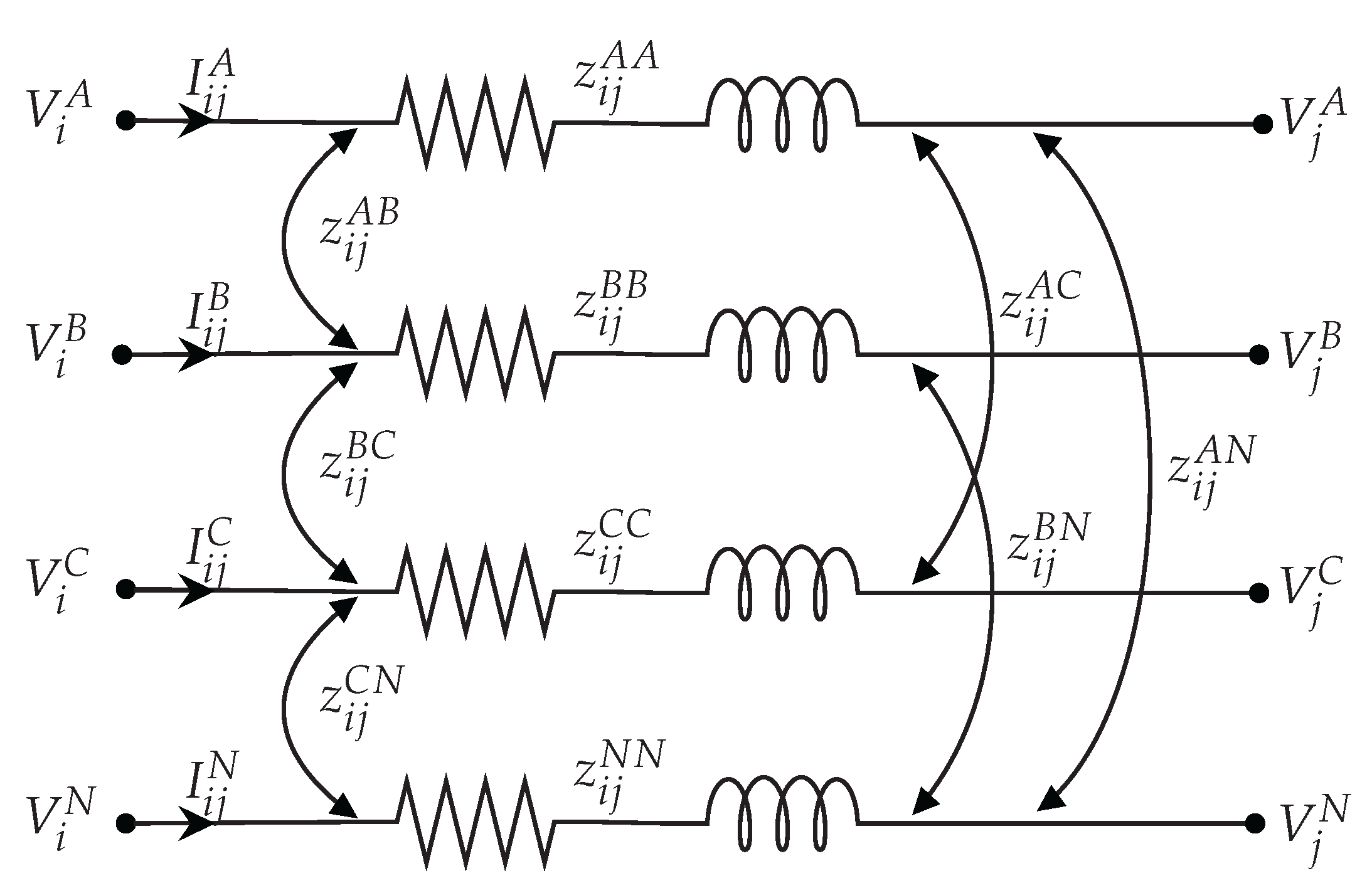
- Model of three-phase distribution lines
- 2.
- Model of three-phase loads
- Solidly-grounded Y-connected loadsAs reported in [70], the three-phase current demanded at node k for a solidly-grounded Y-connected load can be written in a matrix form as shown in the following equation:where is the vector containing the current per phase demanded at node k; , a positive-definite diagonal matrix; , a vector containing the voltage per phase demanded at node k; and , the vector containing the complex power per phase demanded at node k.
- -connected loadsAccording to [70], the three-phase current demanded at node k for a -connected load can be expressed in a matrix form as shown in the following equation:where matrices and have the following structure:.
3.3.2. Three-Phase Version of the Backward/Forward Sweep Power Flow Method
| Algorithm 2 Solution to the multi-period three-phase power flow problem using the backward/forward sweep power flow method in order to calculate the fitness function of the optimization problem under study. |
 |
4. Three-Phase Test Systems and Additional Considerations
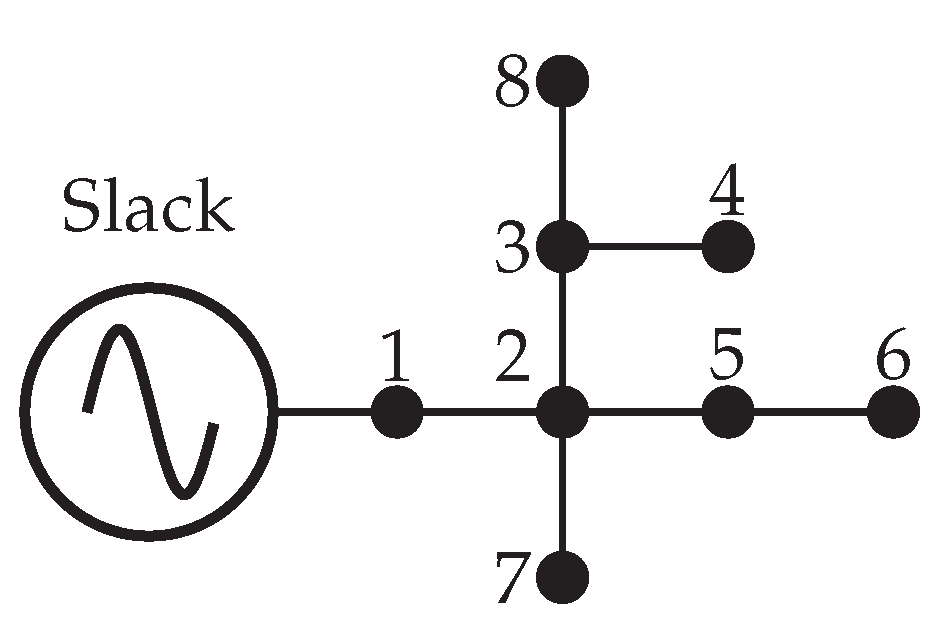
4.1. 8-Node Test System
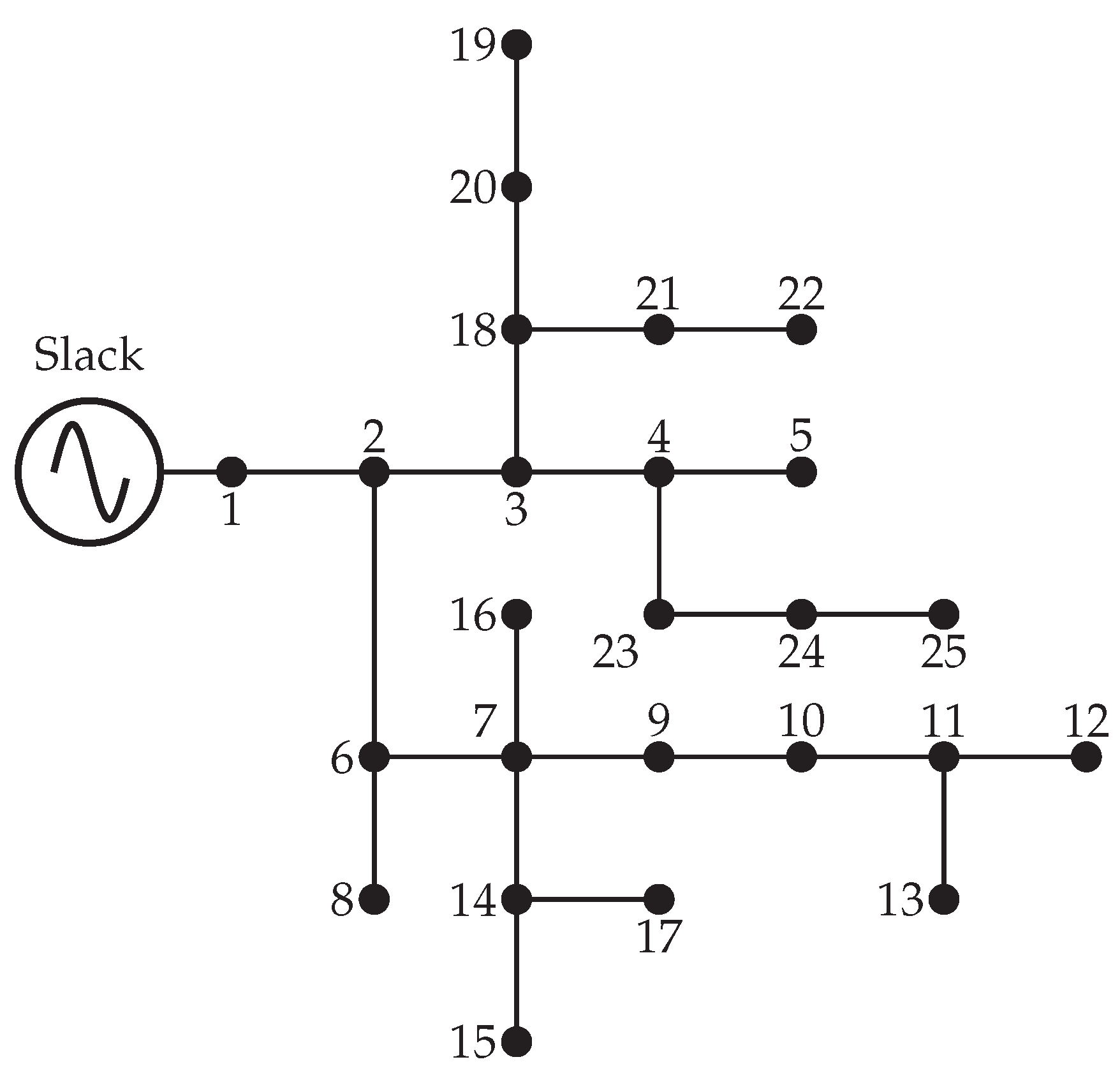
4.2. 25-Node Test System
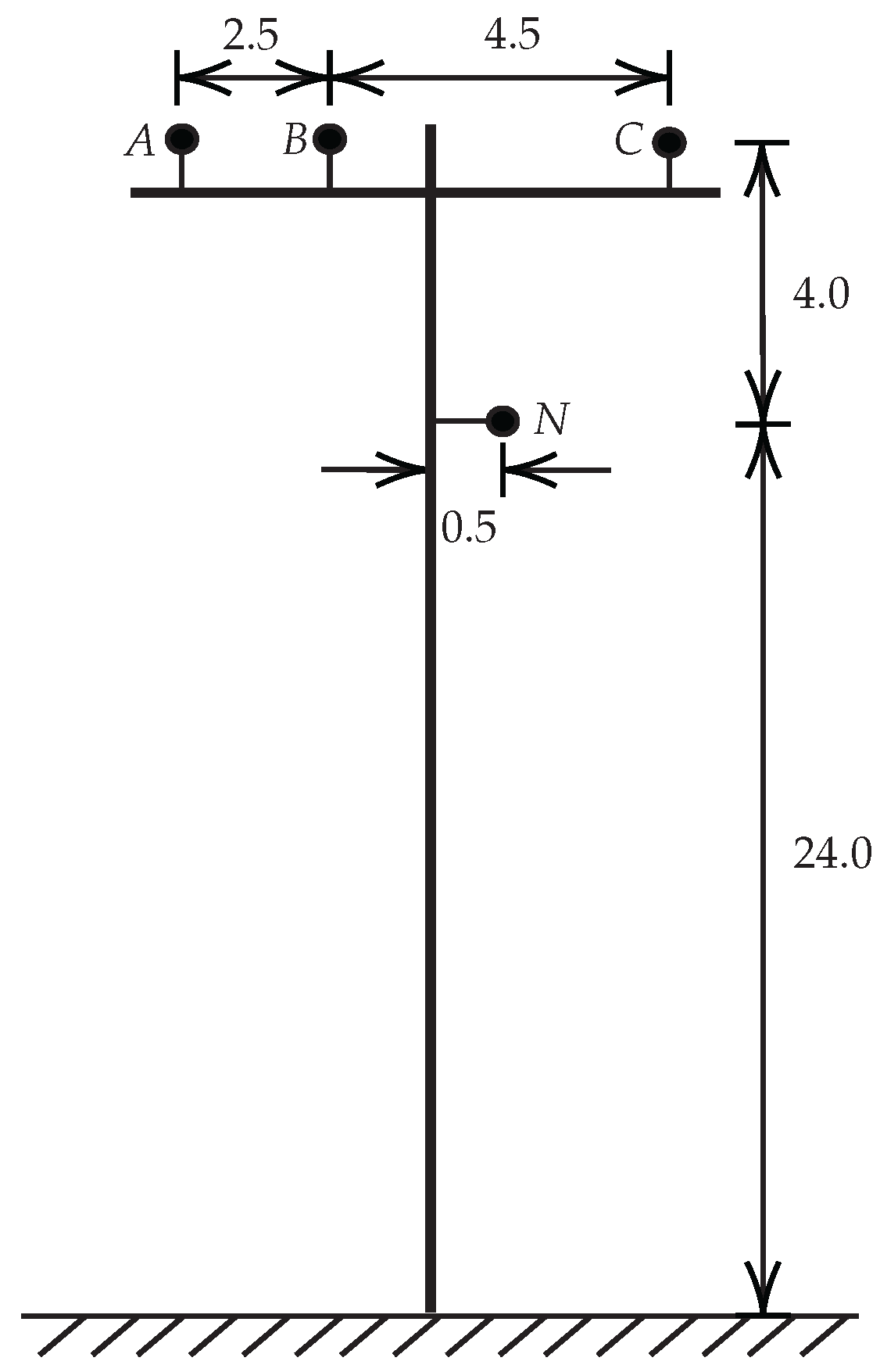
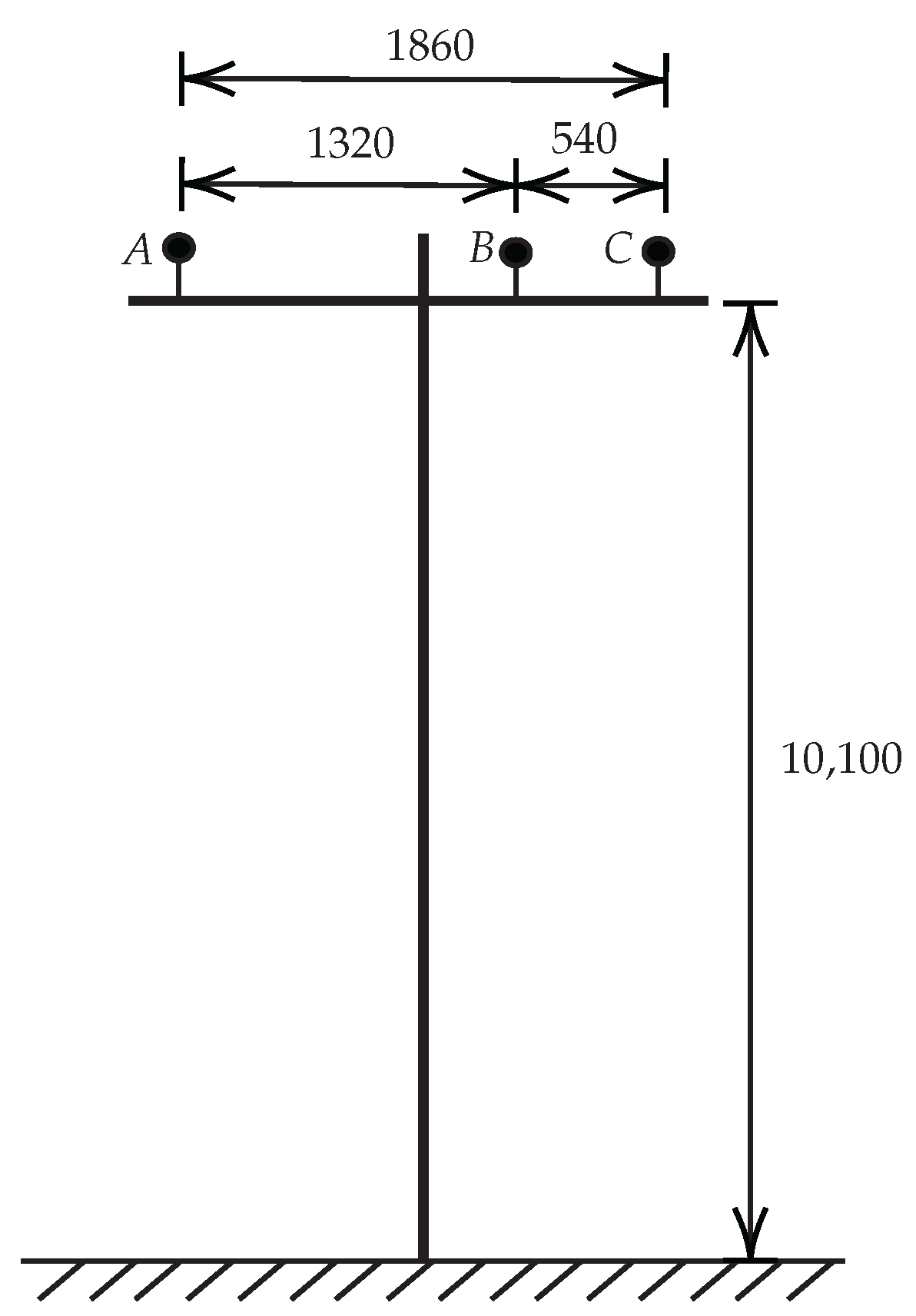
4.3. Overhead Line Configuration and Set of Available Conductors
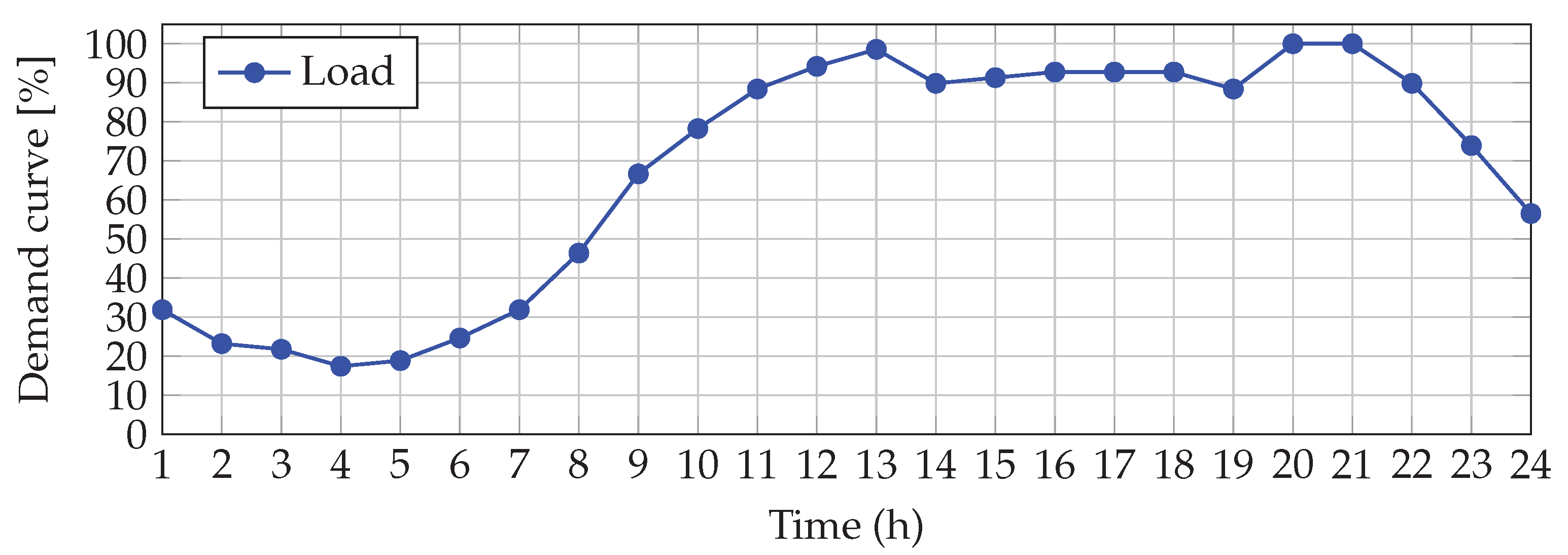
4.4. Load Profile Curve
5. Numerical Results and Discussion
5.1. Results in the 8-Node Test System
5.1.1. Numerical Results
5.1.2. Statistical Analysis
5.1.3. Feasibility Check
5.2. Results in the 25-Node Test System
5.2.1. Numerical Results
5.2.2. Statistical Analysis
5.2.3. Feasibility Check
6. Conclusions and Future Work
- 🗸
- In the 8-node test system, the SSA achieved a reduction in total annual operating costs of 0.0021% compared to the SCA. In the 25-node test system, it achieved a reduction of 1.97% compared to the SCA and of 3.63% compared to the HOA.
- 🗸
- The proposed solution methodology presented a low standard deviation when it solved the optimal conductor selection and phase-balancing problems in the 8- and 25-node test systems (1506.07 USD/year and 717.61 USD/year, respectively). These values were lower than those of the two methods used here for comparison (i.e., the SCA and the HOA), which confirms the repeatability and robustness of the proposed SSA when it solves the problem under study. Also, this ensures that, in each evaluation, its solution falls within a range of 1507 USD/year in the 8-node system and of 718 USD/year in the 25-node system with respect to the average value obtained for each system.
- 🗸
- The processing time required by the proposed methodology to find an optimal and feasible solution to the problem under study was 57.47 s in the 8-node test system and 526.19 s in its 25-node counterpart. These processing times are acceptable, considering that the SSA evaluated approximately 240,000 three-phase power flows and explored and exploited a solution space with a size of in the 8-node test system and of in the 25-node test system. Therefore, we may conclude that the proposed solution methodology is independent of the number of nodes, as long as the system under study has a radial topology. Nevertheless, if the number of nodes in the system increases, the solution space expands, lengthening the processing time needed to find a solution to the problem. This increase in time, however, is not critical in the planning of three-phase distribution systems because its most important concern is the quality of the solution.
- 🗸
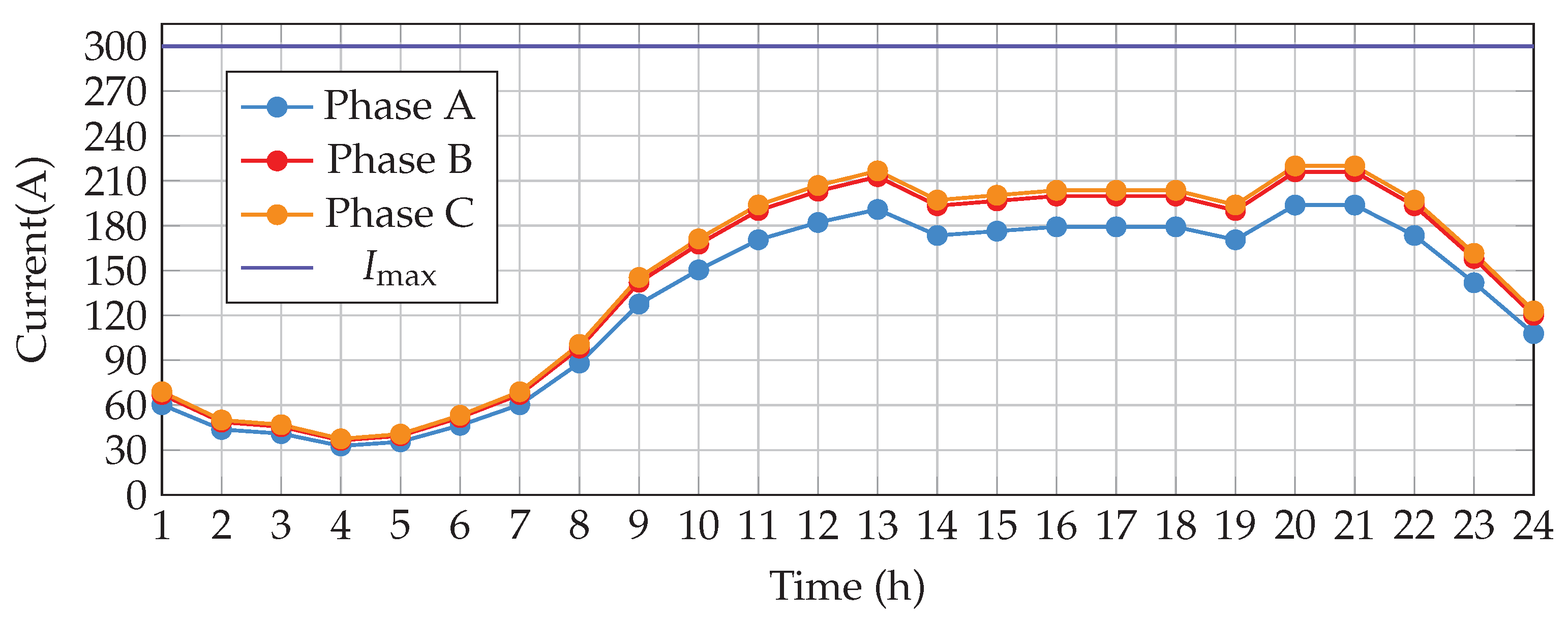
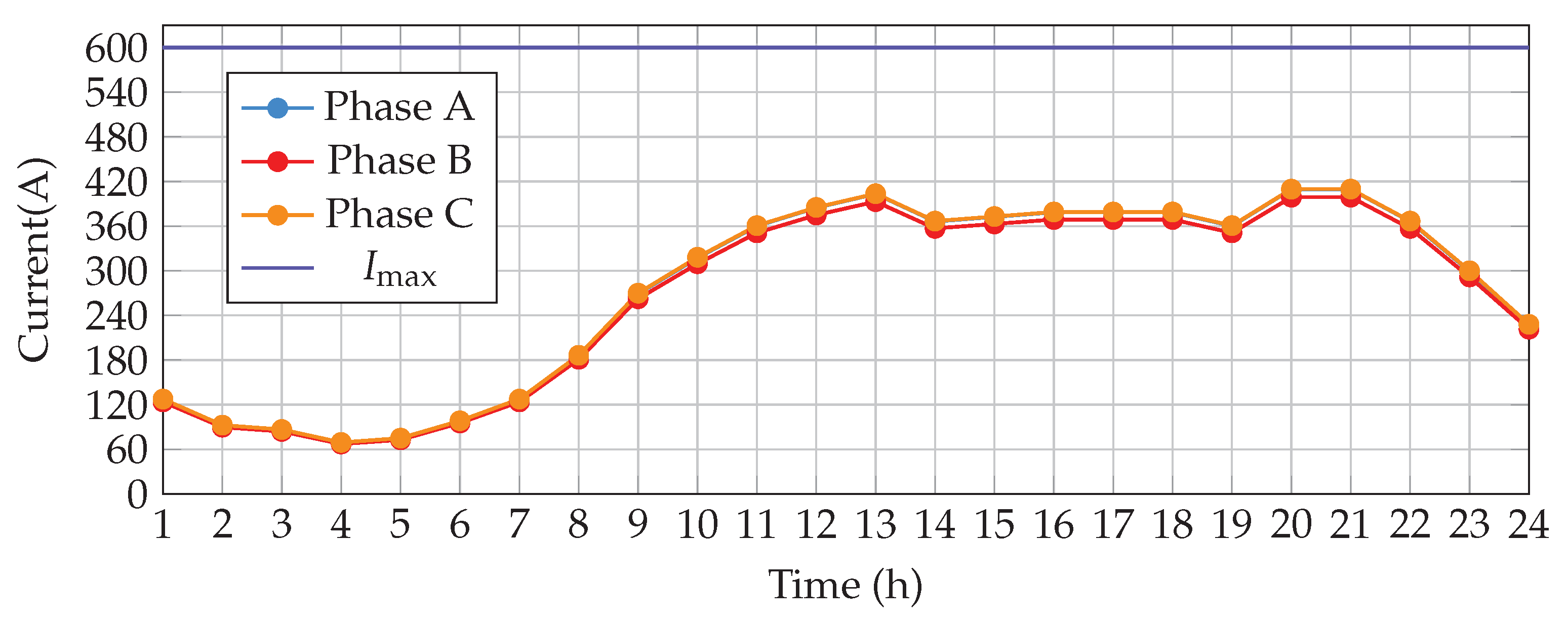
- In both test systems, the three-phase current reached its highest value in all the conductors in the system during the period of peak demand (from 20 to 21 h). Particularly, the most critical case was that of distribution line 1, with values of 193.75 A in phase A, 216.01 A in phase B, and 219.90 A in phase C in the 8-node test system and of 409.44 A in phase A, 398.90 A in phase B, and 409.71 A in phase C in the 25-node test system. These results confirm that, in both test systems, the thermal current limit constraint set for the installed conductors was respected because, in the most critical case, the loadability of line 1 in the 8-node test system was 64.58% in phase A, 72% in phase B, and 73.3% in phase C, while that in the 25-node test system was 68.24% in phase A, 66.48% in phase B, and 68.29% in phase C.
- 🗸
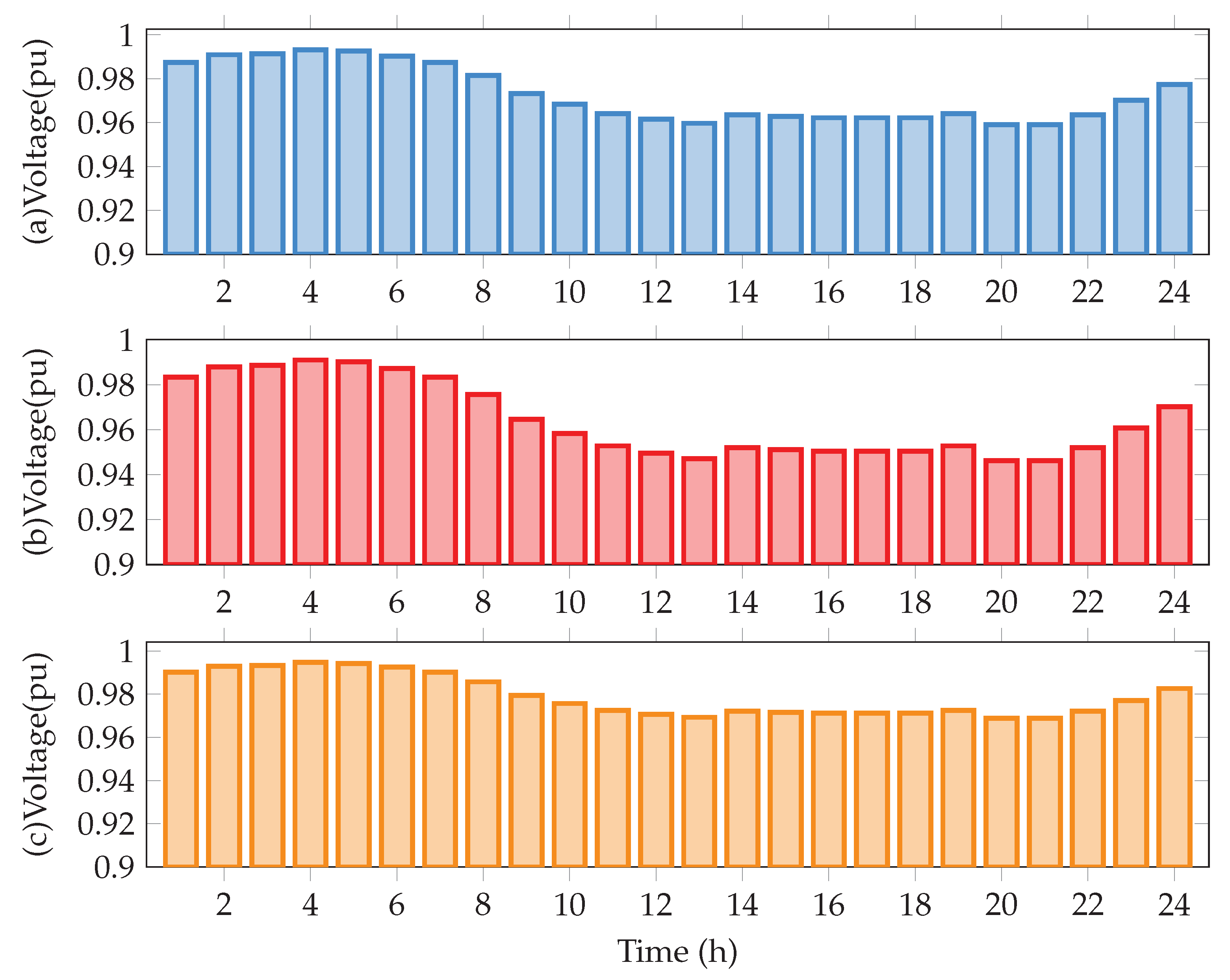
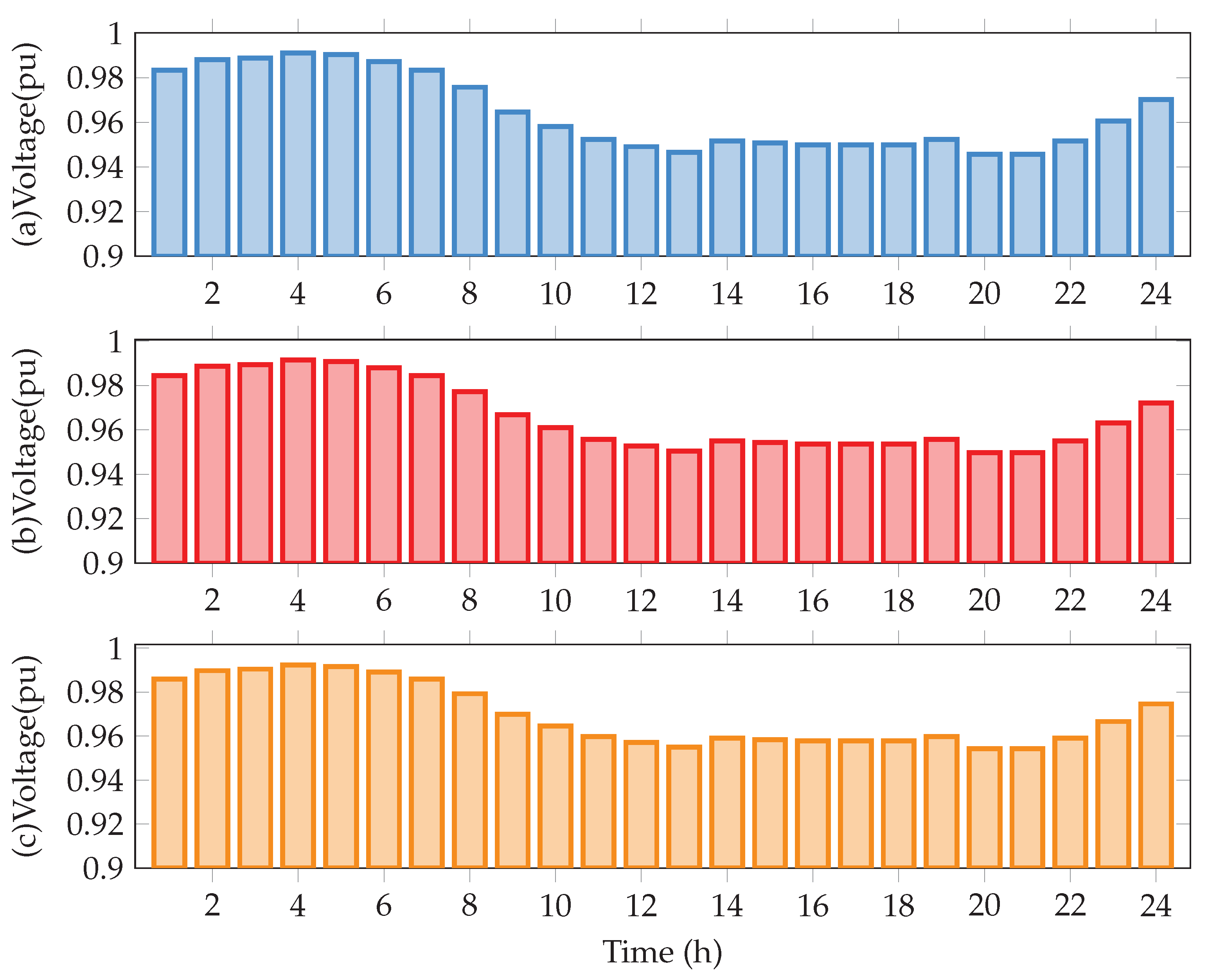
- Regarding the voltage profiles, the minimum voltage during the period of peak demand was 0.9591 pu in phase A, 0.9463 pu in phase B, and 0.9689 pu in phase C in the 8-node test system and 0.9457 pu in phase A, 0.9498 pu in phase B, and 0.9543 pu in phase C in the 25-node test system. This demonstrates that the solution provided by the SSA respected the voltage regulation constraint established for the system, which was set at .
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Löfquist, L. Is there a universal human right to electricity? Int. J. Hum. Rights 2020, 24, 711–723. [Google Scholar] [CrossRef]
- Sarkodie, S.A.; Adams, S. Electricity access, human development index, governance and income inequality in Sub-Saharan Africa. Energy Rep. 2020, 6, 455–466. [Google Scholar] [CrossRef]
- Ghiasi, M. Detailed study, multi-objective optimization, and design of an AC-DC smart microgrid with hybrid renewable energy resources. Energy 2019, 169, 496–507. [Google Scholar] [CrossRef]
- Shen, T.; Li, Y.; Xiang, J. A Graph-Based Power Flow Method for Balanced Distribution Systems. Energies 2018, 11, 511. [Google Scholar] [CrossRef]
- Ghiasi, M.; Niknam, T.; Dehghani, M.; Siano, P.; Alhelou, H.H.; Al-Hinai, A. Optimal Multi-Operation Energy Management in Smart Microgrids in the Presence of RESs Based on Multi-Objective Improved DE Algorithm: Cost-Emission Based Optimization. Appl. Sci. 2021, 11, 3661. [Google Scholar] [CrossRef]
- Ouali, S.; Cherkaoui, A. An improved backward/forward sweep power flow method based on a new network information organization for radial distribution systems. J. Electr. Comput. Eng. 2020, 2020, 5643410. [Google Scholar] [CrossRef]
- Aboshady, F.; Thomas, D.W.; Sumner, M. A wideband single end fault location scheme for active untransposed distribution systems. IEEE Trans. Smart Grid 2019, 11, 2115–2124. [Google Scholar] [CrossRef]
- Arias, J.; Calle, M.; Turizo, D.; Guerrero, J.; Candelo-Becerra, J.E. Historical load balance in distribution systems using the branch and bound algorithm. Energies 2019, 12, 1219. [Google Scholar] [CrossRef]
- Garcés-Ruiz, A. Power Flow in Unbalanced Three-Phase Power Distribution Networks Using Matlab: Theory, analysis, and quasi-dynamic simulation. Ingeniería 2022, 27, e19252. [Google Scholar] [CrossRef]
- Cortés-Caicedo, B.; Avellaneda-Gómez, L.S.; Montoya, O.D.; Alvarado-Barrios, L.; Chamorro, H.R. Application of the Vortex Search Algorithm to the Phase-Balancing Problem in Distribution Systems. Energies 2021, 14, 1282. [Google Scholar] [CrossRef]
- Cabrera, J.B.; Veiga, M.F.; Morales, D.X.; Medina, R. Reducing power losses in smart grids with cooperative game theory. In Advanced Communication and Control Methods for Future Smartgrids; Intechopen: London, UK, 2019; p. 49. [Google Scholar]
- Trentini, C.; de Oliveira Guedes, W.; de Oliveira, L.W.; Dias, B.H.; Ferreira, V.H. Maintenance planning of electric distribution systems—A review. J. Control. Autom. Electr. Syst. 2021, 32, 186–202. [Google Scholar] [CrossRef]
- Martínez-Gil, J.F.; Moyano-García, N.A.; Montoya, O.D.; Alarcon-Villamil, J.A. Optimal Selection of Conductors in Three-Phase Distribution Networks Using a Discrete Version of the Vortex Search Algorithm. Computation 2021, 9, 80. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, H.; Yu, D.C.; Wang, X.; Song, H. A practical approach to the conductor size selection in planning radial distribution systems. IEEE Trans. Power Deliv. 2000, 15, 350–354. [Google Scholar] [CrossRef]
- Zhu, J.; Bilbro, G.; Chow, M.Y. Phase balancing using simulated annealing. IEEE Trans. Power Syst. 1999, 14, 1508–1513. [Google Scholar] [CrossRef]
- Han, X.; Wang, H.; Liang, D. Master-slave game optimization method of smart energy systems considering the uncertainty of renewable energy. Int. J. Energy Res. 2021, 45, 642–660. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grajales, A.; Hincapié, R.A. Optimal Selection of Conductors in Distribution Systems Using Tabu Search Algorithm [Selección óptima de Conductores en Sistemas de Distribución Empleando el Algoritmo Búsqueda Tabú]. 2018. Available online: https://www.scielo.cl/scielo.php?script=sci_arttext&pid=S0718-33052018000200283&lng=en&nrm=iso (accessed on 3 July 2022).
- Ismael, S.M.; Aleem, S.; Abdelaziz, A.Y. Optimal conductor selection in radial distribution systems using whale optimization algorithm. J. Eng. Sci. Technol. 2019, 14, 87–107. [Google Scholar]
- Kumari, M.; Singh, V.; Ranjan, R. Optimal selection of conductor in RDS considering weather condition. In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 28–29 September 2018; pp. 647–651. [Google Scholar]
- Mohanty, S.; Kasturi, K.; Nayak, M.R. Application of ER-WCA to Determine Conductor Size for Performance Improvement in Distribution System. In Proceedings of the 2021 International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies (ICAECT), Bhilai, India, 19–20 February 2021; pp. 1–5. [Google Scholar]
- Montoya, O.D.; Serra, F.M.; De Angelo, C.H.; Chamorro, H.R.; Alvarado-Barrios, L. Heuristic Methodology for Planning AC Rural Medium-Voltage Distribution Grids. Energies 2021, 14, 5141. [Google Scholar] [CrossRef]
- Garces, A.; Gil-González, W.; Montoya, O.D.; Chamorro, H.R.; Alvarado-Barrios, L. A Mixed-Integer Quadratic Formulation of the Phase-Balancing Problem in Residential Microgrids. Appl. Sci. 2021, 11, 1972. [Google Scholar] [CrossRef]
- Cortés-Caicedo, B.; Avellaneda-Gómez, L.S.; Montoya, O.D.; Alvarado-Barrios, L.; Álvarez-Arroyo, C. An improved crow search algorithm applied to the phase swapping problem in asymmetric distribution systems. Symmetry 2021, 13, 1329. [Google Scholar] [CrossRef]
- Cruz-Reyes, J.L.; Salcedo-Marcelo, S.S.; Montoya, O.D. Application of the Hurricane-Based Optimization Algorithm to the Phase-Balancing Problem in Three-Phase Asymmetric Networks. Computers 2022, 11, 43. [Google Scholar] [CrossRef]
- Montoya, O.D.; Molina-Cabrera, A.; Grisales-Noreña, L.F.; Hincapié, R.A.; Granada, M. Improved genetic algorithm for phase-balancing in three-phase distribution networks: A master-slave optimization approach. Computation 2021, 9, 67. [Google Scholar] [CrossRef]
- Montoya, O.D.; Alarcon-Villamil, J.A.; Hernández, J.C. Operating cost reduction in distribution networks based on the optimal phase-swapping including the costs of the working groups and energy losses. Energies 2021, 14, 4535. [Google Scholar] [CrossRef]
- Mandal, S.; Pahwa, A. Optimal selection of conductors for distribution feeders. IEEE Trans. Power Syst. 2002, 17, 192–197. [Google Scholar] [CrossRef]
- Joshi, D.; Burada, S.; Mistry, K.D. Distribution system planning with optimal conductor selection. In Proceedings of the 2017 Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 26–27 October 2017; pp. 263–268. [Google Scholar]
- Rao, R.S.; Satish, K.; Narasimham, S. Optimal conductor size selection in distribution systems using the harmony search algorithm with a differential operator. Electr. Power Compon. Syst. 2011, 40, 41–56. [Google Scholar] [CrossRef]
- López, L.; Hincapié, R.A.; Gallego, R.A. Multi-objective Distribution System Planning using an NSGA II Evolutionary Algorithm [Planeamiento multiobjetivo de sistemas de distribución usando un algoritmo evolutivo NSGA-II]. Rev. EIA 2011, 8, 141–151. Available online: https://revistas.eia.edu.co/index.php/reveia/article/view/252 (accessed on 9 November 2021).
- Khalil, T.M.; Gorpinich, A.V. Optimal conductor selection and capacitor placement for loss reduction of radial distribution systems by selective particle swarm optimization. In Proceedings of the 2012 Seventh International Conference on Computer Engineering & Systems (ICCES), Cairo, Egypt, 27–29 September 2012; pp. 215–220. [Google Scholar]
- Legha, M.M.; Javaheri, H.; Legha, M.M. Optimal Conductor Selection in Radial Distribution Systems for Productivity Improvement Using Genetic Algorithm. Iraqi J. Electr. Electron. Eng. 2013, 9, 29–35. [Google Scholar] [CrossRef]
- Legha, M.M.; Noormohamadi, H.; Barkhori, A. Optimal conductor selection in radial distribution using bacterial foraging algorithm and comparison with ICA method. WALIA J. 2015, 31, 37–43. [Google Scholar]
- Ismael, S.M.; Aleem, S.H.A.; Abdelaziz, A.Y. Optimal selection of conductors in Egyptian radial distribution systems using sine-cosine optimization algorithm. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 September 2017; pp. 103–107. [Google Scholar]
- Abdelaziz, A.Y.; Fathy, A. A novel approach based on crow search algorithm for optimal selection of conductor size in radial distribution networks. Eng. Sci. Technol. Int. J. 2017, 20, 391–402. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Norena, L.F. On the mathematical modeling for optimal selecting of calibers of conductors in DC radial distribution networks: An MINLP approach. Electr. Power Syst. Res. 2021, 194, 107072. [Google Scholar] [CrossRef]
- Chen, T.H.; Cherng, J.T. Optimal phase arrangement of distribution transformers connected to a primary feeder for system unbalance improvement and loss reduction using a genetic algorithm. In Proceedings of the 21st International Conference on Power Industry Computer Applications. Connecting Utilities. PICA 99. To the Millennium and Beyond (Cat. No. 99CH36351), Santa Clara, CA, USA, 21 May 1999; pp. 145–151. [Google Scholar]
- Gandomkar, M. Phase balancing using genetic algorithm. In Proceedings of the 39th International Universities Power Engineering Conference (UPEC 2004), Bristol, UK, 6–8 September 2004; Volume 1, pp. 377–379. [Google Scholar]
- Granada Echeverri, M.; Gallego Rendón, R.A.; López Lezama, J.M. Optimal phase balancing planning for loss reduction in distribution systems using a specialized genetic algorithm. Ing. Cienc. 2012, 8, 121–140. [Google Scholar] [CrossRef]
- Rios, M.A.; Castano, J.C.; Garcés, A.; Molina-Cabrera, A. Phase Balancing in Power Distribution Systems: A heuristic approach based on group-theory. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Garcés-Ruiz, A.; Granada-Echeverri, M.; Gallego, R.A. Balance de fases usando colonia de hormigas. Ing. Compet. 2005, 7, 43–52. [Google Scholar] [CrossRef]
- Tuppadung, Y.; Kurutach, W. The modified particle swarm optimization for phase balancing. In Proceedings of the TENCON 2006-2006 IEEE Region 10 Conference, Hong Kong, China, 14–17 November 2006; pp. 1–4. [Google Scholar]
- Toma, N.; Ivanov, O.; Neagu, B.; Gavrila, M. A PSO algorithm for phase load balancing in low voltage distribution networks. In Proceedings of the 2018 International Conference and Exposition on Electrical And Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 0857–0862. [Google Scholar]
- Huang, M.Y.; Chen, C.S.; Lin, C.H.; Kang, M.S.; Chuang, H.J.; Huang, C.W. Three-phase balancing of distribution feeders using immune algorithm. IET Gener. Transm. Distrib. 2008, 2, 383–392. [Google Scholar] [CrossRef]
- Sathiskumar, M.; Lakshminarasimman, L.; Thiruvenkadam, S. A self adaptive hybrid differential evolution algorithm for phase balancing of unbalanced distribution system. Int. J. Electr. Power Energy Syst. 2012, 42, 91–97. [Google Scholar] [CrossRef]
- Hooshmand, R.; Soltani, S. Simultaneous optimization of phase balancing and reconfiguration in distribution networks using BF–NM algorithm. Int. J. Electr. Power Energy Syst. 2012, 41, 76–86. [Google Scholar] [CrossRef]
- Montoya, O.D.; Arias-Londoño, A.; Grisales-Noreña, L.F.; Barrios, J.Á.; Chamorro, H.R. Optimal Demand Reconfiguration in Three-Phase Distribution Grids Using an MI-Convex Model. Symmetry 2021, 13, 1124. [Google Scholar] [CrossRef]
- Montoya, O.D.; Grisales-Noreña, L.F.; Rivas-Trujillo, E. Approximated Mixed-Integer Convex Model for Phase Balancing in Three-Phase Electric Networks. Computers 2021, 10, 109. [Google Scholar] [CrossRef]
- Hu, R.; Li, Q.; Qiu, F. Ensemble learning based convex approximation of three-phase power flow. IEEE Trans. Power Syst. 2021, 36, 4042–4051. [Google Scholar] [CrossRef]
- Carreno, I.L.; Scaglione, A.; Saha, S.S.; Arnold, D.; Ngo, S.T.; Roberts, C. Log (v) 3LPF: A Linear Power Flow Formulation for Unbalanced Three-Phase Distribution Systems. IEEE Trans. Power Syst. 2022. [Google Scholar] [CrossRef]
- Lavorato, M.; Franco, J.F.; Rider, M.J.; Romero, R. Imposing radiality constraints in distribution system optimization problems. IEEE Trans. Power Syst. 2011, 27, 172–180. [Google Scholar] [CrossRef]
- Devikanniga, D.; Vetrivel, K.; Badrinath, N. Review of meta-heuristic optimization based artificial neural networks and its applications. J. Phys. Conf. Ser. 2019, 1362, 012074. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Salimon, S.A.; Aderinko, H.A.; Fajuke, F.; Suuti, K.A. Load flow analysis of nigerian radial distribution network using backward/forward sweep technique. J. VLSI Des. Adv. 2019, 2, 1–11. [Google Scholar] [CrossRef]
- Jabari, F.; Sohrabi, F.; Pourghasem, P.; Mohammadi-Ivatloo, B. Backward-forward sweep based power flow algorithm in distribution systems. In Optimization of Power System Problems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 365–382. [Google Scholar]
- Hegazy, A.E.; Makhlouf, M.; El-Tawel, G.S. Improved salp swarm algorithm for feature selection. J. King Saud Univ.-Comput. Inf. Sci. 2020, 32, 335–344. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Ibrahim, R.A.; Ewees, A.A.; Oliva, D.; Abd Elaziz, M.; Lu, S. Improved salp swarm algorithm based on particle swarm optimization for feature selection. J. Ambient. Intell. Humaniz. Comput. 2019, 10, 3155–3169. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, T.; Ye, X.; Heidari, A.A.; Liang, G.; Chen, H.; Pan, Z. Differential evolution-assisted salp swarm algorithm with chaotic structure for real-world problems. Eng. Comput. 2022. [Google Scholar] [CrossRef]
- Adetunji, K.E.; Hofsajer, I.W.; Abu-Mahfouz, A.M.; Cheng, L. A review of metaheuristic techniques for optimal integration of electrical units in distribution networks. IEEE Access 2020, 9, 5046–5068. [Google Scholar] [CrossRef]
- Faris, H.; Mirjalili, S.; Aljarah, I.; Mafarja, M.; Heidari, A.A. Salp swarm algorithm: Theory, literature review, and application in extreme learning machines. Nat.-Inspir. Optim. 2020, 811, 185–199. [Google Scholar] [CrossRef]
- Castelli, M.; Manzoni, L.; Mariot, L.; Nobile, M.S.; Tangherloni, A. Salp Swarm Optimization: A critical review. Expert Syst. Appl. 2022, 189, 116029. [Google Scholar] [CrossRef]
- Montano, J.; Mejia, A.F.T.; Rosales Muñoz, A.A.; Andrade, F.; Garzon Rivera, O.D.; Palomeque, J.M. Salp Swarm Optimization Algorithm for Estimating the Parameters of Photovoltaic Panels Based on the Three-Diode Model. Electronics 2021, 10, 3123. [Google Scholar] [CrossRef]
- Asl, D.K.; Seifi, A.R.; Rastegar, M.; Mohammadi, M. Optimal energy flow in integrated energy distribution systems considering unbalanced operation of power distribution systems. Int. J. Electr. Power Energy Syst. 2020, 121, 106132. [Google Scholar]
- Pandey, A.; Jereminov, M.; Wagner, M.R.; Bromberg, D.M.; Hug, G.; Pileggi, L. Robust power flow and three-phase power flow analyses. IEEE Trans. Power Syst. 2018, 34, 616–626. [Google Scholar] [CrossRef]
- Kersting, W.H. Distribution System Modeling and Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Souza, B.; Araujo, L.; Penido, D. An Extended Kron Method for Power System Applications. IEEE Lat. Am. Trans. 2020, 18, 1470–1477. [Google Scholar] [CrossRef]
- Kersting, W.H. Radial distribution test feeders. IEEE Trans. Power Syst. 1991, 6, 975–985. [Google Scholar] [CrossRef]
- Mwakabuta, N.; Sekar, A. Comparative study of the IEEE 34 node test feeder under practical simplifications. In Proceedings of the 2007 39th North American Power Symposium, Las Cruces, NM, USA, 30 September–2 October 2007; pp. 484–491. [Google Scholar]
- Montoya, O.D.; Giraldo, J.S.; Grisales-Noreña, L.F.; Chamorro, H.R.; Alvarado-Barrios, L. Accurate and Efficient Derivative-Free Three-Phase Power Flow Method for Unbalanced Distribution Networks. Computation 2021, 9, 61. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Grisales-Noreña, L.F.; Perea-Moreno, A.J.; Hernandez-Escobedo, Q. Optimal placement and sizing of wind generators in AC grids considering reactive power capability and wind speed curves. Sustainability 2020, 12, 2983. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Giral, D.A. On the Matricial Formulation of Iterative Sweep Power Flow for Radial and Meshed Distribution Networks with Guarantee of Convergence. Appl. Sci. 2020, 10, 5802. [Google Scholar] [CrossRef]
- Sahoo, R.R.; Ray, M. PSO based test case generation for critical path using improved combined fitness function. J. King Saud-Univ.-Comput. Inf. Sci. 2020, 32, 479–490. [Google Scholar] [CrossRef]
- Zhang, X.; Beram, S.M.; Haq, M.A.; Wawale, S.G.; Buttar, A.M. Research on algorithms for control design of human–machine interface system using ML. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 462–469. [Google Scholar] [CrossRef]
- Harman, M.; Jia, Y.; Zhang, Y. Achievements, open problems and challenges for search based software testing. In Proceedings of the 2015 IEEE 8th International Conference on Software Testing, Verification and Validation (ICST), Graz, Austria, 13–17 April 2015; pp. 1–12. [Google Scholar]
- Enel Codensa, S.A. LA202 Circuito Primario Sencillo Construcción Tangencial, Bogotá, Colombia. Available online: https://likinormas.micodensa.com/Norma/lineas_aereas_urbanas_distribucion/lineas_aereas_11_4_13_2_kv/la202_circuito_primario_sencillo_construccion_tangencial (accessed on 5 May 2022).
- Enel Codensa, S.A. LA006 Distancias de Construcción Para Circuitos de 13,2 -11,4 kv Y B.T., Bogotá, Colombia. Available online: https://likinormas.micodensa.com/Norma/lineas_aereas_urbanas_distribucion/la006_distancias_construccion_circuitos_13_2_11 (accessed on 5 May 2022).
- Gil-González, W.; Montoya, O.D.; Holguín, E.; Garces, A.; Grisales-Noreña, L.F. Economic dispatch of energy storage systems in dc microgrids employing a semidefinite programming model. J. Energy Storage 2019, 21, 1–8. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L.; Orozco-Henao, C.; Serra, F. Economic dispatch of BESS and renewable generators in DC microgrids using voltage-dependent load models. Energies 2019, 12, 4494. [Google Scholar] [CrossRef] [Green Version]
- Comisión de Regulación de Energía y Gas. Resolución 025 de 1995, Bogotá, Colombia. 1995. Available online: http://apolo.creg.gov.co/Publicac.nsf/Indice01/Resoluci%C3%B3n-1995-CRG95025 (accessed on 5 May 2022).












| Parameter | Value | Unit |
|---|---|---|
| Conductor size | 1/0 AWG | - |
| Conductor type | ACSR | - |
| 1.12000 | /mile | |
| 0.00446 | ||
| 2.50000 | ||
| 4.50000 | ||
| 7.00000 | ||
| 5.65685 | ||
| 4.27200 | ||
| 5.00000 |
| Branch | Node i | Node j | (km) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 1 | 519 | 250 | 259 | 126 | 515 | 250 |
| 2 | 2 | 3 | 1 | 0 | 0 | 259 | 126 | 486 | 235 |
| 3 | 2 | 5 | 1 | 0 | 0 | 0 | 0 | 226 | 109 |
| 4 | 2 | 7 | 1 | 486 | 235 | 0 | 0 | 0 | 0 |
| 5 | 3 | 4 | 1 | 0 | 0 | 0 | 0 | 324 | 157 |
| 6 | 3 | 8 | 1 | 0 | 0 | 267 | 129 | 0 | 0 |
| 7 | 5 | 6 | 1 | 0 | 0 | 0 | 0 | 145 | 70 |
| Branch | Node i | Node j | (km) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.3048 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 2 | 3 | 0.1524 | 36 | 21.6 | 28.8 | 19.2 | 42 | 26.4 |
| 3 | 2 | 6 | 0.1524 | 43.2 | 28.8 | 33.6 | 24 | 30 | 30 |
| 4 | 3 | 4 | 0.1524 | 57.6 | 43.2 | 4.8 | 3.4 | 48 | 30 |
| 5 | 3 | 18 | 0.1524 | 57.6 | 43.2 | 38.4 | 28.8 | 48 | 36 |
| 6 | 4 | 5 | 0.1524 | 43.2 | 28.8 | 28.8 | 19.2 | 36 | 24 |
| 7 | 4 | 23 | 0.1219 | 8.6 | 64.8 | 4.8 | 3.8 | 60 | 42 |
| 8 | 6 | 7 | 0.1524 | 0 | 0 | 0 | 0 | 0 | 0 |
| 9 | 6 | 8 | 0.3048 | 43.2 | 28.8 | 28.8 | 19.2 | 3.6 | 2.4 |
| 10 | 7 | 9 | 0.1524 | 72 | 50.4 | 38.4 | 28.8 | 48 | 30 |
| 11 | 7 | 14 | 0.1524 | 57.6 | 36 | 38.4 | 28.8 | 60 | 42 |
| 12 | 7 | 16 | 0.1524 | 57.6 | 4.3 | 3.8 | 28.8 | 48 | 36 |
| 13 | 9 | 10 | 0.1524 | 36 | 21.6 | 28.8 | 19.2 | 32 | 26.4 |
| 14 | 10 | 11 | 0.0914 | 50.4 | 31.7 | 24 | 14.4 | 36 | 24 |
| 15 | 11 | 12 | 0.0610 | 57.6 | 36 | 48 | 33.6 | 48 | 36 |
| 16 | 11 | 13 | 0.0610 | 64.8 | 21.6 | 33.6 | 21.1 | 36 | 24 |
| 17 | 14 | 15 | 0.0914 | 7.2 | 4.3 | 4.8 | 2.9 | 6 | 3.6 |
| 18 | 14 | 17 | 0.0914 | 57.6 | 43.2 | 33.6 | 24 | 54 | 38.4 |
| 19 | 18 | 20 | 0.1524 | 50.4 | 36 | 38.4 | 28.8 | 54 | 38.4 |
| 20 | 18 | 21 | 0.1219 | 5.8 | 4.3 | 3.4 | 2.4 | 5.4 | 3.8 |
| 21 | 20 | 19 | 0.1219 | 8.6 | 6.5 | 4.8 | 3.4 | 6 | 4.8 |
| 22 | 21 | 22 | 0.1219 | 72 | 50.4 | 57.6 | 43.2 | 60 | 48 |
| 23 | 23 | 24 | 0.1219 | 50.4 | 36 | 43.2 | 30.7 | 4.8 | 3.6 |
| 24 | 24 | 25 | 0.1219 | 8.6 | 6.5 | 4.8 | 2.9 | 6 | 4.2 |
| Conductor Size | r (/km) | (mm) | I (A) | (USD/km) |
|---|---|---|---|---|
| 1 | 1.0501 | 1.2741 | 180 | 1986 |
| 2 | 0.8575 | 1.2741 | 200 | 2790 |
| 3 | 0.6959 | 1.3594 | 230 | 3815 |
| 4 | 0.5561 | 1.5545 | 270 | 5090 |
| 5 | 0.4493 | 1.8288 | 300 | 8067 |
| 6 | 0.3679 | 2.4811 | 340 | 12,673 |
| 7 | 0.1609 | 8.4734 | 600 | 23,419 |
| 8 | 0.1155 | 9.5402 | 720 | 30,070 |
| Conductor Size (km) | |||
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | |||
| 8 | |||
| Method | Caliber | ||||
|---|---|---|---|---|---|
| Connection | |||||
| SCA | 125,351.07 | 62,690.07 | 62,361.00 | 300.00 | |
| HOA | 125,348.49 | 62,687.49 | 62,361.00 | 300.00 | |
| SSA | 125,348.49 | 62,687.49 | 62,361.00 | 300.00 | |
| Method | Best | Mean | Worst | SD | Avg. Time (s) |
|---|---|---|---|---|---|
| SCA | 125,351.07 | 131,673.85 | 146,483.13 | 3602.51 | 57.57 |
| HOA | 125,348.49 | 130,929.42 | 140,533.94 | 2911.76 | 60.25 |
| SSA | 125,348.49 | 128,498.41 | 130,443.99 | 1506.07 | 57.47 |
| Method | Conductor Size | ||||
|---|---|---|---|---|---|
| Connection | |||||
| HOA | 98,068.39 | 45,968.05 | 51,400.34 | 700.00 | |
| SCA | 96,404.47 | 48,661.03 | 46,843.43 | 900.00 | |
| SSA | 94,505.81 | 46,195.44 | 47,710.37 | 600.00 | |
| Method | Best | Mean | Worst | SD | Avg. Time (s) |
|---|---|---|---|---|---|
| HOA | 98,068.39 | 106,388.04 | 117,337.29 | 4191.39 | 451.00 |
| SCA | 96,404.47 | 109,539.42 | 135,192.31 | 8896.28 | 446.20 |
| SSA | 94,505.81 | 96,461.04 | 98,631.18 | 717.61 | 526.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortés-Caicedo, B.; Grisales-Noreña, L.F.; Montoya, O.D. Optimal Selection of Conductor Sizes in Three-Phase Asymmetric Distribution Networks Considering Optimal Phase-Balancing: An Application of the Salp Swarm Algorithm. Mathematics 2022, 10, 3327. https://doi.org/10.3390/math10183327
Cortés-Caicedo B, Grisales-Noreña LF, Montoya OD. Optimal Selection of Conductor Sizes in Three-Phase Asymmetric Distribution Networks Considering Optimal Phase-Balancing: An Application of the Salp Swarm Algorithm. Mathematics. 2022; 10(18):3327. https://doi.org/10.3390/math10183327
Chicago/Turabian StyleCortés-Caicedo, Brandon, Luis Fernando Grisales-Noreña, and Oscar Danilo Montoya. 2022. "Optimal Selection of Conductor Sizes in Three-Phase Asymmetric Distribution Networks Considering Optimal Phase-Balancing: An Application of the Salp Swarm Algorithm" Mathematics 10, no. 18: 3327. https://doi.org/10.3390/math10183327
APA StyleCortés-Caicedo, B., Grisales-Noreña, L. F., & Montoya, O. D. (2022). Optimal Selection of Conductor Sizes in Three-Phase Asymmetric Distribution Networks Considering Optimal Phase-Balancing: An Application of the Salp Swarm Algorithm. Mathematics, 10(18), 3327. https://doi.org/10.3390/math10183327