
Stabilization for Stochastic Coupled Kuramoto Oscillators via Nonlinear Distributed Feedback Control


Abstract
:1. Introduction
- A novel nonlinear distributed feedback control is designed to stabilize the SCKOs.
- By constructing a new Lyapunov function for SCKOs and applying some stochastic analysis skills, sufficient criteria for the stability of SCKOs which can be easily checked are obtained.
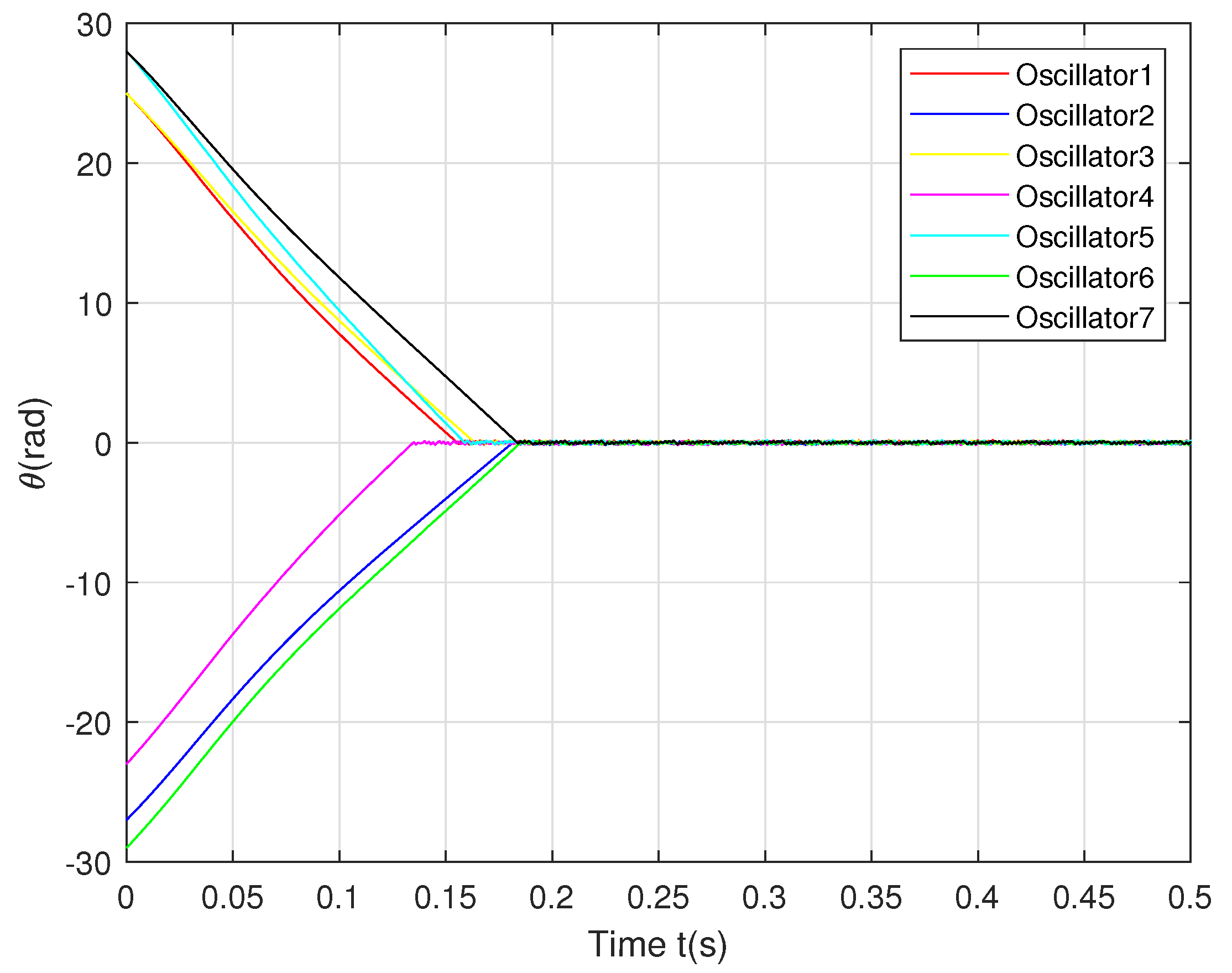
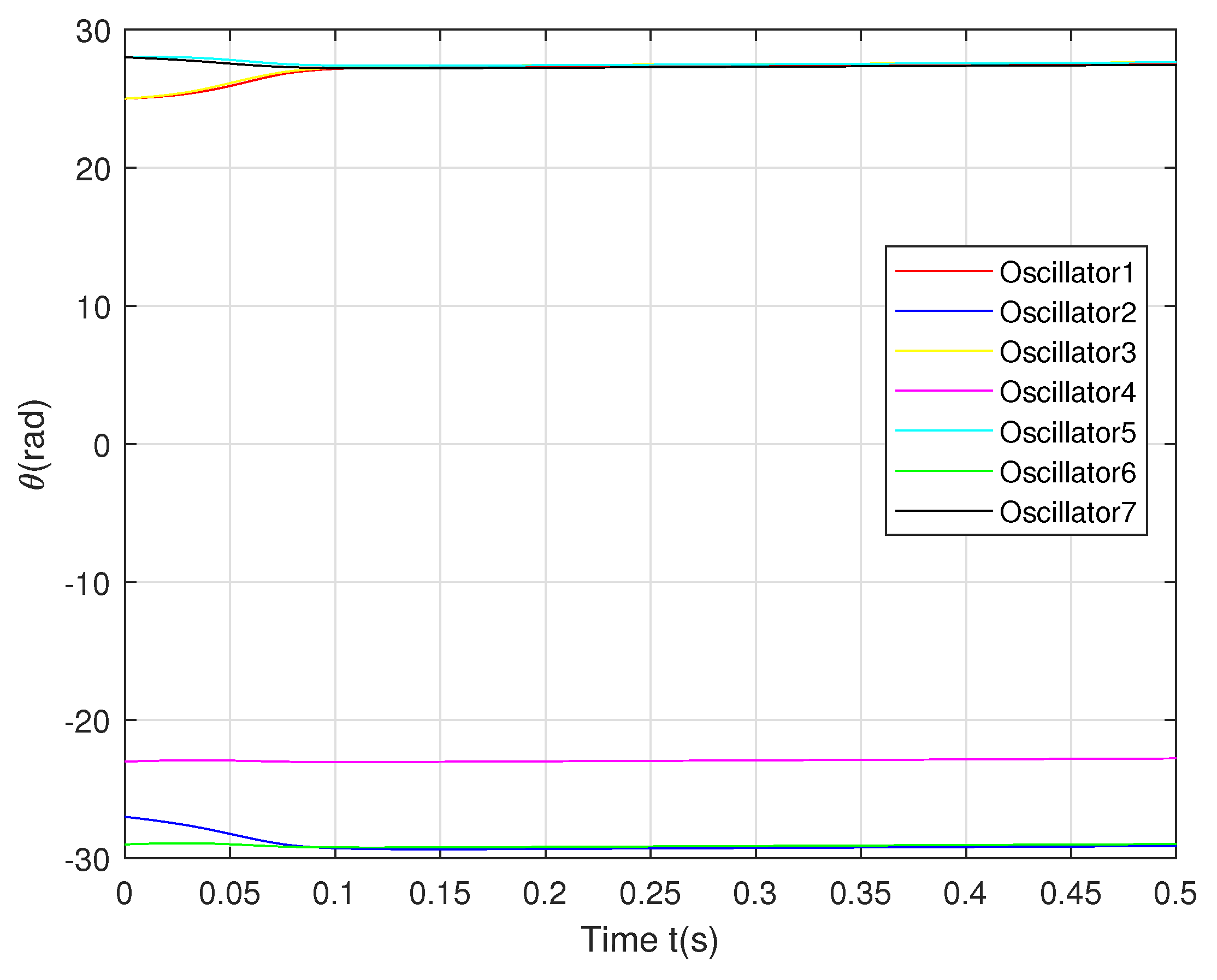
- A numerical simulation is performed to verify the effectiveness and applicability of our theoretical result.
2. Notations and Preliminary Knowledge
2.1. Notations
2.2. Preliminaries
3. Main Result
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CKOs | Coupled Kuramoto oscillators |
| SCKOs | Stochastic coupled Kuramoto oscillators |
References
- Yang, X.; Song, Q.; Cao, J.; Lu, J. Synchronization of Coupled Markovian Reaction-Diffusion Neural Networks with Proportional Delays Via Quantized Control. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 951–958. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Wu, B. On input-to-state stability for stochastic coupled control systems on networks. Appl. Math. Comput. 2015, 262, 90–101. [Google Scholar]
- El-Sayed, A.M.A.; Fouad, H.A. On a Coupled System of Stochastic Itô’s-Differential and the Arbitrary (Fractional) Order Differential Equations with Nonlocal Random and Stochastic Integral Conditions. Mathematics 2021, 9, 2571. [Google Scholar] [CrossRef]
- Zada, A.; Fatima, S.; Ali, Z.; Xu, J.; Cui, Y. Stability Results for a Coupled System of Impulsive Fractional Differential Equations. Mathematics 2019, 7, 927. [Google Scholar] [CrossRef]
- Lou, S.; Hu, X.; Zhao, L.; Li, S. Event-triggered neural adaptive backstepping control of the K chaotic PMSGs coupled system. Int. J. Electr. Power Energy Syst. 2022, 135, 107475. [Google Scholar]
- Wu, Y.; Wang, C.; Li, W. Generalized quantized intermittent control with adaptive strategy on finite-time synchronization of delayed coupled systems and applications. Nonlinear Dyn. 2019, 95, 1361–1377. [Google Scholar] [CrossRef]
- Rao, S.C.S.; Chaturvedi, A.K.; Su, H. Analysis and implementation of a computational technique for a coupled system of two singularly perturbed parabolic semilinear—Diffusion equations having discontinuous source terms. Nonlinear Anal.-Hybrid Syst. 2022, 108, 106232. [Google Scholar] [CrossRef]
- Wang, M.; Li, W. Stability of random impulsive coupled systems on networks with Markovian switching. Stoch. Anal. Appl. 2019, 37, 1107–1132. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, W.; Ding, X. Input-to-state stability for stochastic multi-group models with multi-dispersal and time-varying delay. Appl. Math. Comput. 2019, 343, 114–127. [Google Scholar] [CrossRef]
- Li, S.; Lv, C.; Ding, X. Synchronization of stochastic hybrid coupled systems with multi-weights and mixed delays via aperiodically adaptive intermittent control. Nonlinear Anal.-Hybrid Syst. 2020, 35, 100819. [Google Scholar] [CrossRef]
- Gao, S.; Guo, H.; Chen, T. The existence of periodic solutions for discrete-time coupled systems on networks with time-varying delay. Physics A 2019, 526, 120876. [Google Scholar] [CrossRef]
- Fabien, K.; Martine, L.W.; Hervé, S.; Adoum, D.A.; Pierre, M.A.N.; Mahamat, B.; Sévérin, N. Effects of damping on the dynamics of an electromechanical system consisting of mechanical network of discontinuous coupled system oscillators with irrational nonlinearities: Application to sand sieves. Chaos Solitons Fractals 2022, 156, 111805. [Google Scholar]
- Li, W.; Wang, S.; Su, H.; Wang, K. Global exponential stability for stochastic networks of coupled oscillators with variable delay. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 877–888. [Google Scholar] [CrossRef]
- Franci, A.; Chaillet, A. Existence and robustness of phase-locking in coupled Kuramoto oscillators under mean-field feedback. Automatica 2011, 47, 1193–1202. [Google Scholar] [CrossRef]
- Meier, M.; Haschke, R.; Ritter, H.J. Perceptual grouping through competition in coupled oscillator networks. Neurocomputing 2014, 141, 76–83. [Google Scholar] [CrossRef]
- Umberto, B.; Enrique, Z. A stochastic approach to the synchronization of coupled oscillators. Front. Energy Res. 2020, 8, 115. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539–1564. [Google Scholar]
- Ross, A.; Kyrychko, S.N.; Blyuss, K.B.; Kyrychko, Y.N. Dynamics of coupled Kuramoto oscillators with distributed delays. Chaos 2021, 31, 103107. [Google Scholar] [CrossRef]
- Dénes, K.; Sándor, B.; Néda, Z. Pattern selection in a ring of Kuramoto oscillators. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104868. [Google Scholar] [CrossRef]
- Jaćimović, V. Computing the Douady–Earle extension using Kuramoto oscillators. IEEE Trans. Power Syst. 2019, 9, 523–529. [Google Scholar] [CrossRef]
- Chen, S.H.; Hsia, C.H.; Shiue, M.C. On mathematical analysis of synchronization to bidirectionally coupled Kuramoto oscillators. Nonlinear Anal. Real World Appl. 2020, 56, 103169. [Google Scholar] [CrossRef]
- Markdahl, J.; Thunberg, J.; Goncalves, J. High-dimensional Kuramoto models on Stiefel manifolds synchronize complex networks almost globally. Automatica 2020, 113, 108736. [Google Scholar] [CrossRef]
- Mao, X. Stochastic Differential Equations and Applications; Horwood Publishing: Chichester, UK, 1997. [Google Scholar]
- Guo, Y.; Liu, Y.; Xu, Y. Synchronized stationary distribution of stochastic coupled systems based on graph theory. Math. Meth. Appl. Sci. 2019, 42, 4444–4455. [Google Scholar] [CrossRef]
- Zou, X.; Zheng, Y.; Zhang, L.; Lv, J. Survivability and stochastic bifurcations for a stochastic Holling type II predator-prey model. Commun. Nonlinear Sci. Numer. Simul. 2020, 83, 105136. [Google Scholar] [CrossRef]
- Rafail, K. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wang, C.; Zhou, X.; Shi, X.; Jin, Y. Robust control for uncertain variable fractional order differential systems considering time-varying delays and nonlinear perturbations. Optim. Control Appl. Methods 2022, 43, 979–993. [Google Scholar] [CrossRef]
- Aghayan, Z.S.; Alfi, A.; Tenreiro Machado, J.A. Guaranteed cost-based feedback control design for fractional-order neutral systems with input-delayed and nonlinear perturbations. ISA Trans. 2022, in press. [CrossRef]
- Fabien, K.; Pierre, M.A.N.; Eric, D.D.; Fabien, B.E.; Blaise, N.B.; Michael, S.T.O.; Hervé, S.; Alain, S.T.K.; Martine, L.W.; Emmanuel, E.; et al. Effects of time delay on the dynamics of nonlinear beam on elastic foundation under harmonic moving load: Chaotic detection and its control. J. Vib. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Fabien, K.; Jean, A.M.; Pierre, M.A.N.; Hervé, S.; Eric-Donald, D.; Timothé, T.O.E.; Hatou-Yvelin, D.; Fabien, B.E. Statistical approach of modulational instability in the class of nonlocal NLS equation involving nonlinear Kerr-like responses with non-locality: Exact and approximated solutions. Wave Motion 2022, 113, 102997. [Google Scholar]
- Li, M.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef]
- West, D.B. Introduction to Graph Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Trudeau, R. Introduction to Graph Theory; Courier Dover Publications: New York, NY, USA, 2013. [Google Scholar]
- Fabien, K.; Michael, S.T.O.; Hervé, S.; Alain, S.T.K.; Blaise, N.B.; Martine, L.W.; Emmanuel, E.; François, N. Effects of time delay on the dynamical behavior of nonlinear beam on elastic foundation under periodic loadings: Chaotic detection and it control. Results Phys. 2022, 35, 105305. [Google Scholar]
- Zhang, H.; Xia, J.; Zhuang, G.; Shen, H. Robust interval stability/stabilization and H∞ feedback control for uncertain stochastic Markovian jump systems based on the linear operator. Sci. China Inf. Sci. 2022, 65, 142202. [Google Scholar] [CrossRef]
- Wang, T.; Cheng, R.; Wu, Y. Stability analysis of heterogeneous traffic flow influenced by memory feedback control signal. Appl. Math. Model. 2022, 109, 693–708. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Anderson, D.R. On stability and feedback control of discrete fractional order singular systems with multiple time-varying delays. Chaos Solitons Fractals 2022, 155, 111740. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| No. | |||
|---|---|---|---|
| 1 | 2.2343 | 3 | |
| 2 | −4.8676 | 1 | |
| 3 | 5.5776 | 2 | |
| 4 | −1.7688 | 4 | |
| 5 | 5.1792 | 5 | |
| 6 | 2.4505 | 3 | |
| 7 | −3.9546 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, R.; Gao, S. Stabilization for Stochastic Coupled Kuramoto Oscillators via Nonlinear Distributed Feedback Control. Mathematics 2022, 10, 3329. https://doi.org/10.3390/math10183329
Kang R, Gao S. Stabilization for Stochastic Coupled Kuramoto Oscillators via Nonlinear Distributed Feedback Control. Mathematics. 2022; 10(18):3329. https://doi.org/10.3390/math10183329
Chicago/Turabian StyleKang, Rui, and Shang Gao. 2022. "Stabilization for Stochastic Coupled Kuramoto Oscillators via Nonlinear Distributed Feedback Control" Mathematics 10, no. 18: 3329. https://doi.org/10.3390/math10183329
APA StyleKang, R., & Gao, S. (2022). Stabilization for Stochastic Coupled Kuramoto Oscillators via Nonlinear Distributed Feedback Control. Mathematics, 10(18), 3329. https://doi.org/10.3390/math10183329