
Rainfall-Induced Landslides from Initialization to Post-Failure Flows: Stochastic Analysis with Machine Learning


Abstract
:1. Introduction
2. Method
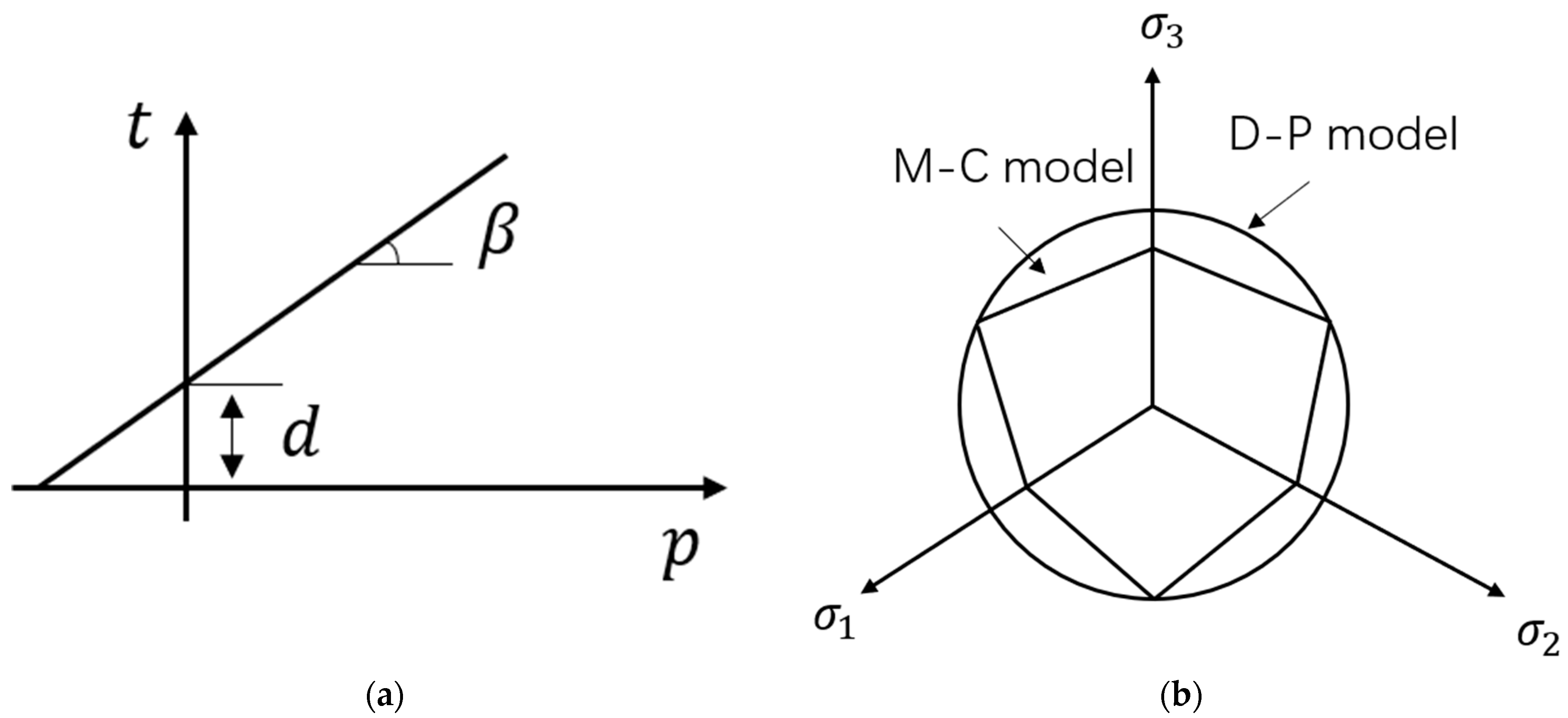
2.1. Soil Constitutive Model
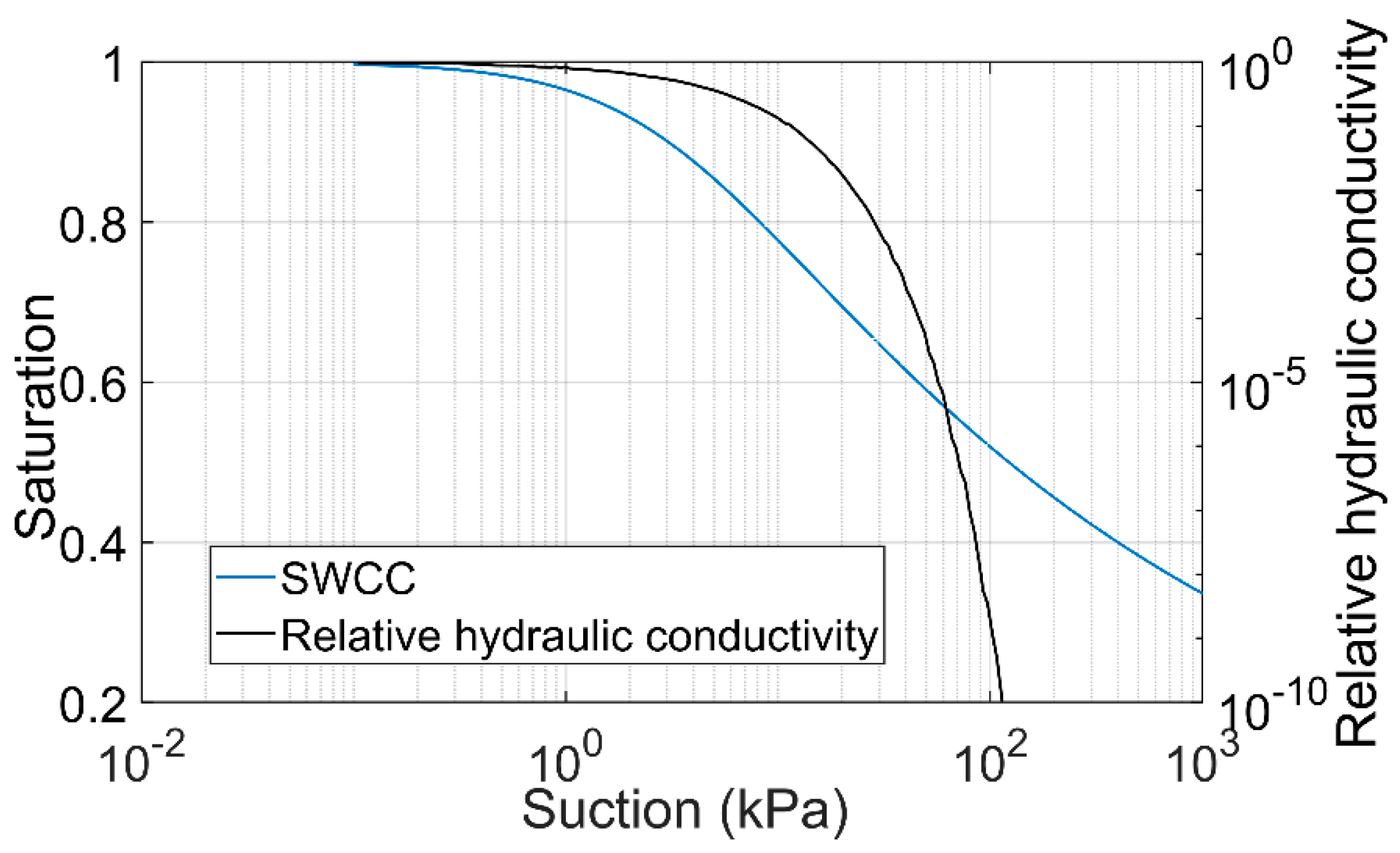
2.2. Coupled Hydro-Mechanical Analysis
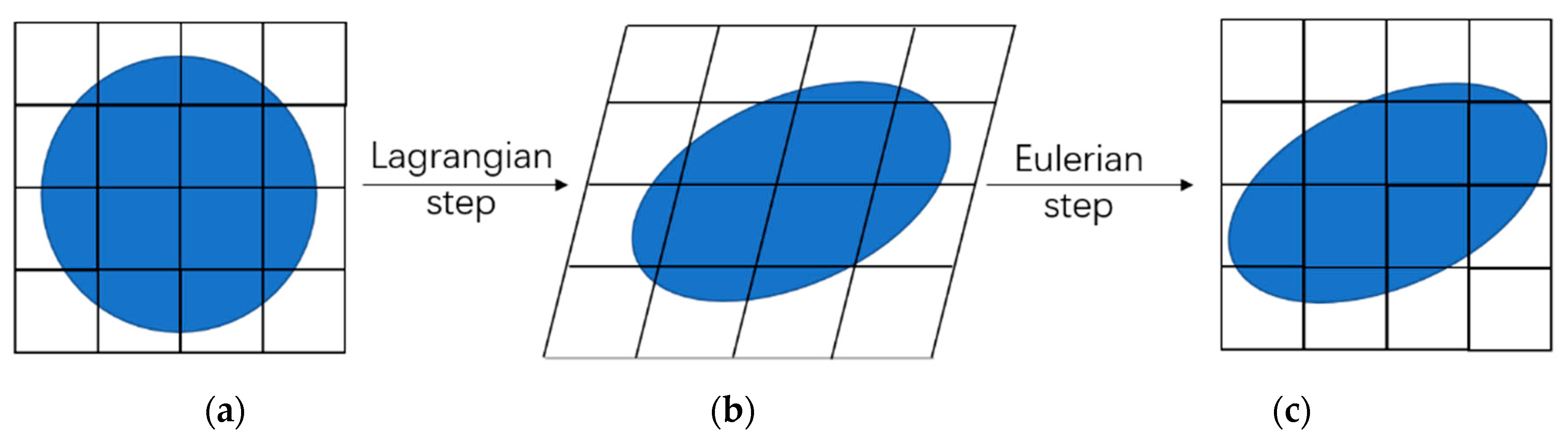
2.3. Coupled Eulerian–Lagrangian (CEL) Method
2.4. Transition between Finite Element Analysis and Coupled Eulerian–Lagrangian Analysis
3. Rainfall-Induced Landslide and Post-Failure Flow
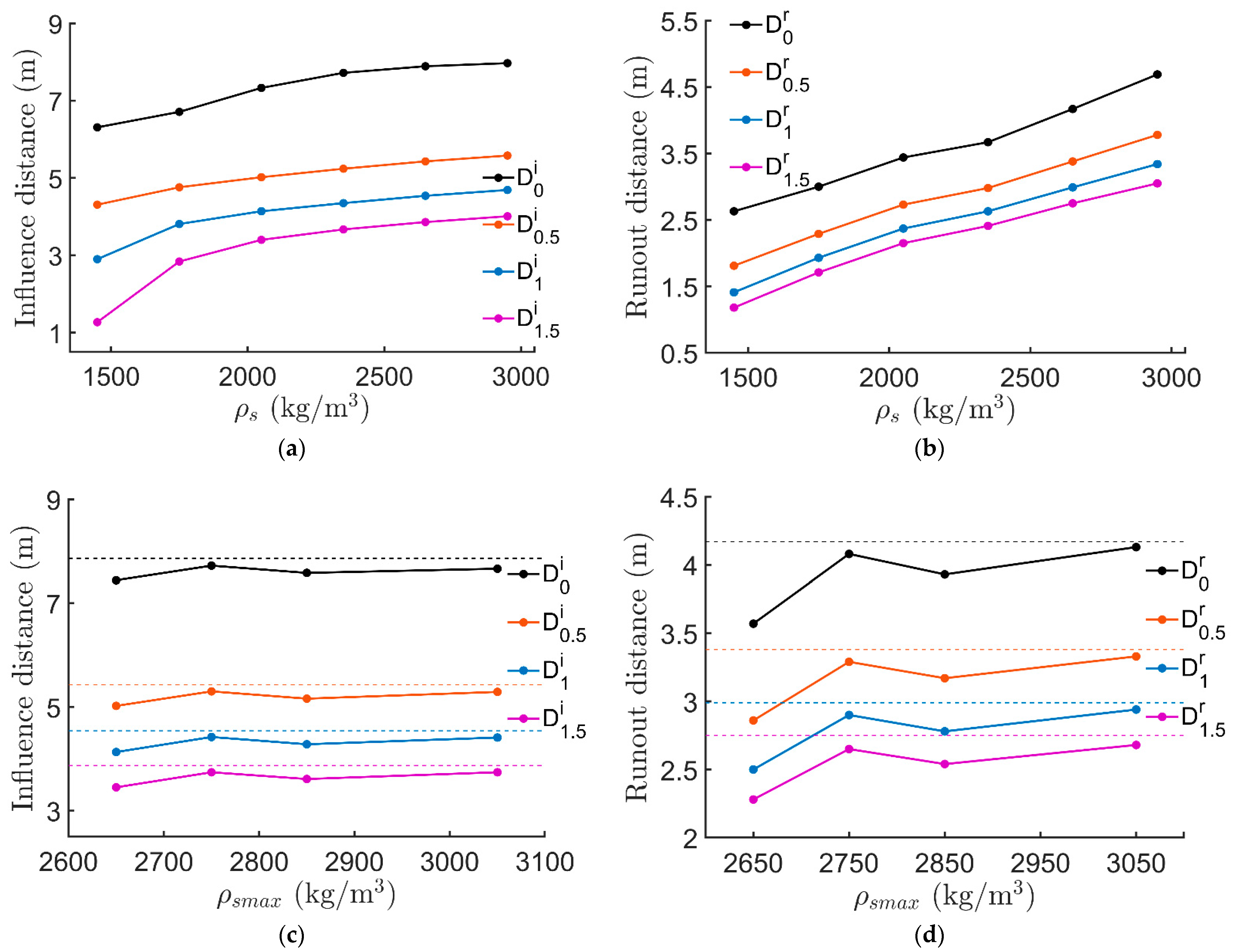
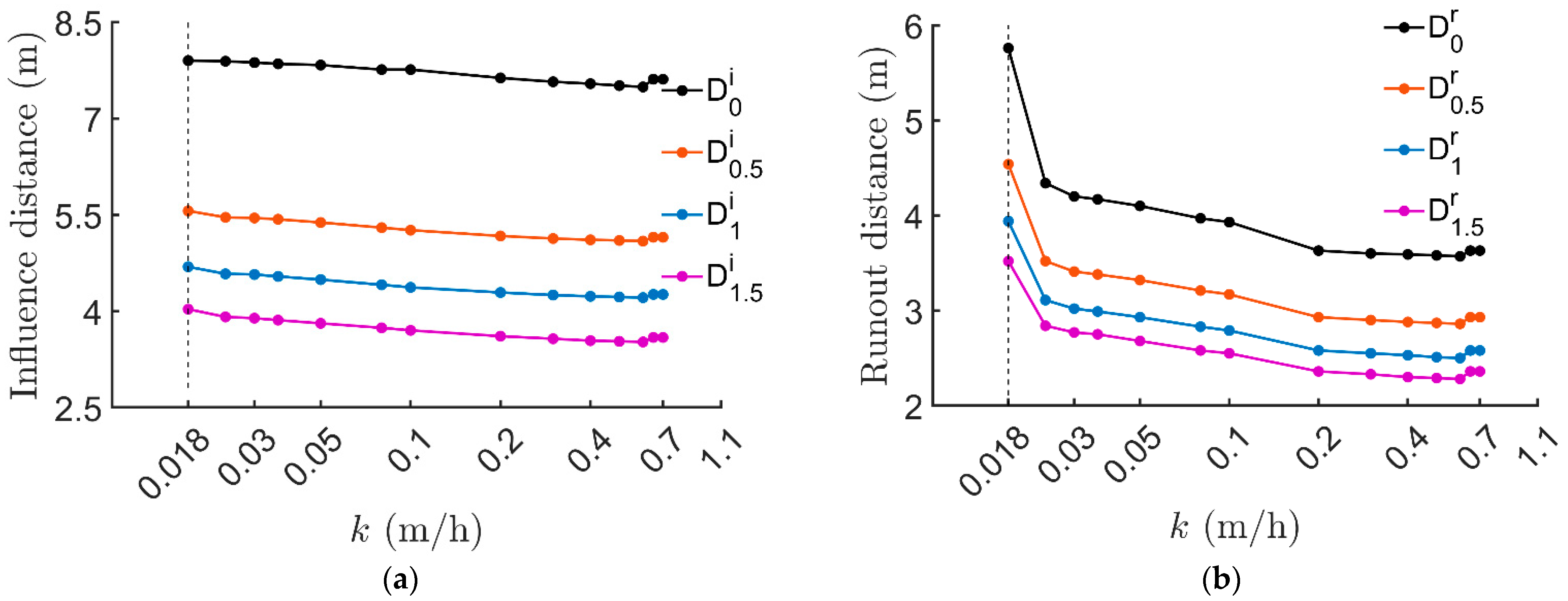
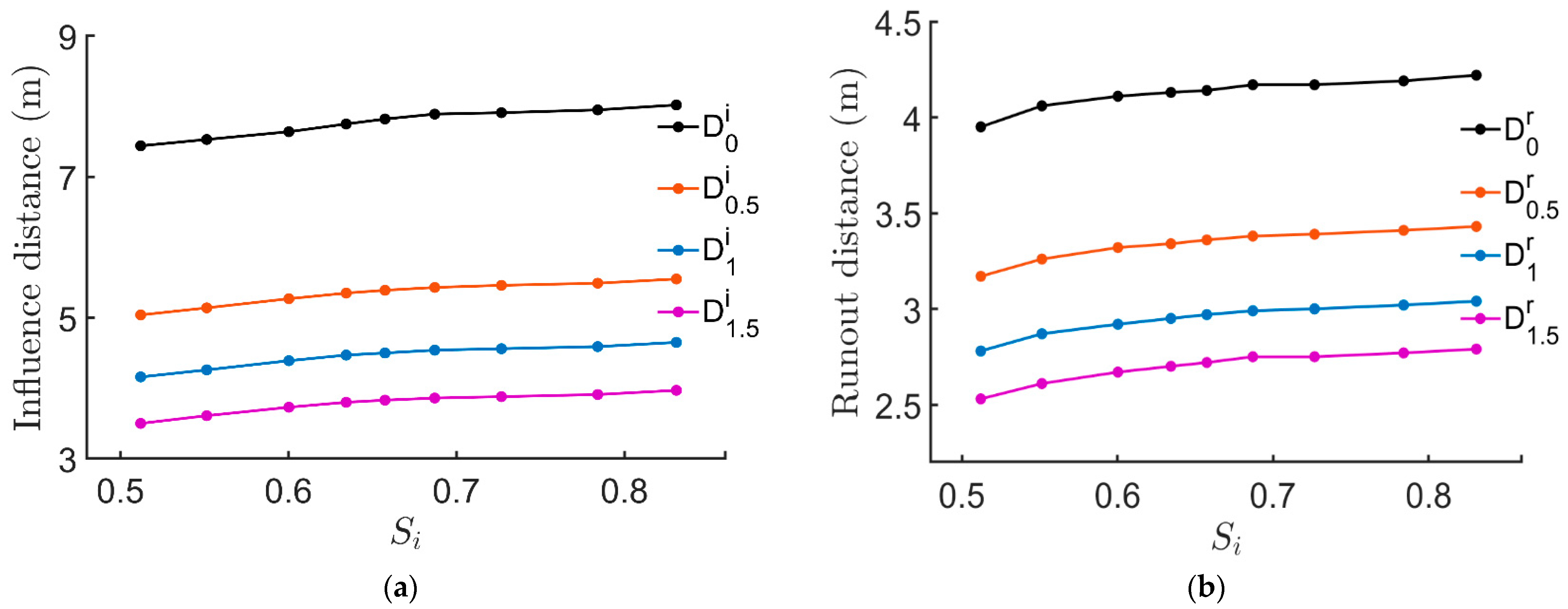
3.1. Effect of Soil and Rainfall Parameters
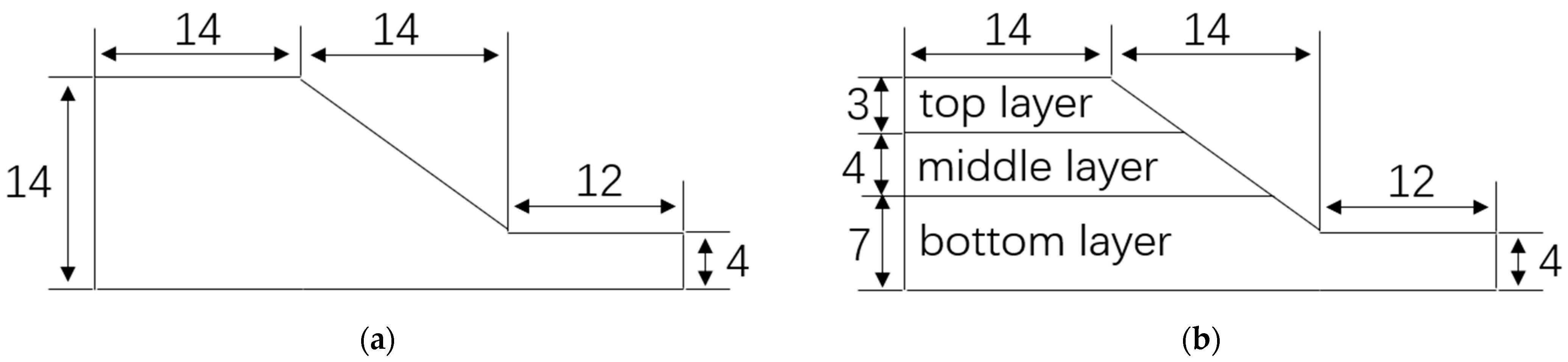
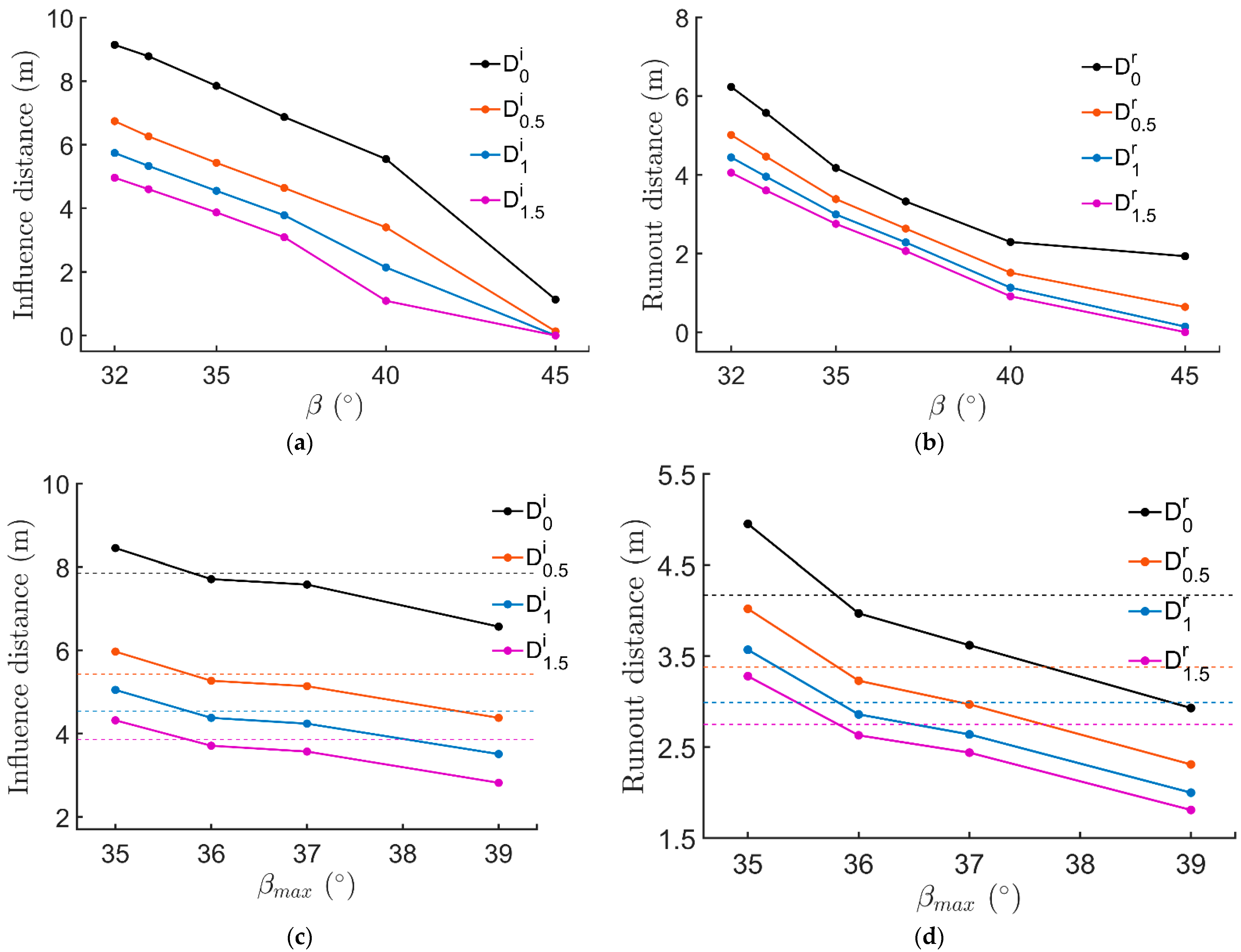
3.2. Effect of Slope Shapes
4. Stochastic Analysis with Machine Learning
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ekanayake, J.C.; Phillips, C.J. Slope Stability Thresholds for Vegetated Hillslopes: A Composite Model. Can. Geotech. J. 2002, 39, 849–862. [Google Scholar] [CrossRef]
- Take, W.A.; Bolton, M.D.; Wong, P.C.P.; Yeung, F.J. Evaluation of Landslide Triggering Mechanisms in Model Fill Slopes. Landslides 2004, 1, 173–184. [Google Scholar] [CrossRef]
- Wang, F.W.; Sassa, K.; Wang, G. Mechanism of a Long-Runout Landslide Triggered by the August 1998 Heavy Rainfall in Fukushima Prefecture, Japan. Eng. Geol. 2002, 63, 169–185. [Google Scholar] [CrossRef]
- Nwazelibe, V.E.; Unigwe, C.O.; Egbueri, J.C. Integration and Comparison of Algorithmic Weight of Evidence and Logistic Regression in Landslide Susceptibility Mapping of the Orumba North Erosion-Prone Region, Nigeria. Model. Earth Syst. Environ. 2022, 1–20. [Google Scholar] [CrossRef]
- Egbueri, J.C.; Igwe, O.; Unigwe, C.O. Gully Slope Distribution Characteristics and Stability Analysis for Soil Erosion Risk Ranking in Parts of Southeastern Nigeria: A Case Study. Environ. Earth Sci. 2021, 80, 292. [Google Scholar] [CrossRef]
- Lacerda, W. The Behavior of Colluvial Slopes in a Tropical Environment. In Landslides: Evaluation and Stabilization/Glissement de Terrain: Evaluation et Stabilisation, Set of 2 Volumes; CRC Press: Boca Raton, FL, USA, 2004; pp. 1315–1342. [Google Scholar] [CrossRef]
- Froude, M.J.; Petley, D.N. Global Fatal Landslide Occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef] [Green Version]
- Schuster, R.L.; Highland, L.M. The Third Hans Cloos Lecture. Urban Landslides: Socioeconomic Impacts and Overview of Mitigative Strategies. Bull. Eng. Geol. Environ. 2007, 66, 1–27. [Google Scholar] [CrossRef]
- Huang, B.; Yin, Y.; Du, C. Risk Management Study on Impulse Waves Generated by Hongyanzi Landslide in Three Gorges Reservoir of China on June 24, 2015. Landslides 2016, 13, 603–616. [Google Scholar] [CrossRef]
- Egbueri, J.C.; Igwe, O.; Ifediegwu, S.I. Erosion Risk Mapping of Anambra State in Southeastern Nigeria: Soil Loss Estimation by RUSLE Model and Geoinformatics. Bull. Eng. Geol. Environ. 2022, 81, 91. [Google Scholar] [CrossRef]
- Nebeokike, U.C.; Igwe, O.; Egbueri, J.C.; Ifediegwu, S.I. Erodibility Characteristics and Slope Stability Analysis of Geological Units Prone to Erosion in Udi Area, Southeast Nigeria. Model. Earth Syst. Environ. 2020, 6, 1061–1074. [Google Scholar] [CrossRef]
- Unigwe, C.O.; Igwe, O.; Onwuka, O.S.; Egbueri, J.C.; Omeka, M.E. Roles of Hydro-Geotechnical and Slope Stability Characteristics in the Erosion of Ajali and Nanka Geologic Formations in Southeastern Nigeria. Arab. J. Geosci. 2022, 15, 1492. [Google Scholar] [CrossRef]
- Cascini, L.; Cuomo, S.; Pastor, M.; Sorbino, G. Modeling of Rainfall-Induced Shallow Landslides of the Flow-Type. J. Geotech. Geoenviron. Eng. 2010, 136, 85–98. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, L.; Zhang, L.; Zhou, Y.; Ye, G.; Guo, N. Modelling Rainfall-Induced Landslides from Initiation of Instability to Post-Failure. Comput. Geotech. 2021, 129, 103877. [Google Scholar] [CrossRef]
- Li, H.; Tang, H.; Qin, Q.; Zhou, J.; Qin, Z.; Fan, C.; Su, P.; Wang, Q.; Zhong, C. Characteristics, Formation Periods and Genetic Mechanisms of Tectonic Fractures in the Tight Gas Sandstones Reservoir: A Case Study of Xujiahe Formation in YB Area, Sichuan Basin, China. J. Pet. Sci. Eng. 2019, 178, 723–735. [Google Scholar] [CrossRef]
- Li, H. Research Progress on Evaluation Methods and Factors Influencing Shale Brittleness: A Review. Energy Rep. 2022, 8, 4344–4358. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Yang, C.; Wu, Y.; Gao, Z.; Jiang, S. Geological Characteristics and Controlling Factors of Deep Shale Gas Enrichment of the Wufeng-Longmaxi Formation in the Southern Sichuan Basin, China. Lithosphere 2022, 2022, 4737801. [Google Scholar] [CrossRef]
- Schrefler, B.A.; Scotta, R. A Fully Coupled Dynamic Model for Two-Phase Fluid Flow in Deformable Porous Media. Comput. Methods Appl. Mech. Eng. 2001, 190, 3223–3246. [Google Scholar] [CrossRef]
- Yang, K.-H.; Uzuoka, R.; Thuo, J.N.; Lin, G.-L.; Nakai, Y. Coupled Hydro-Mechanical Analysis of Two Unstable Unsaturated Slopes Subject to Rainfall Infiltration. Eng. Geol. 2017, 216, 13–30. [Google Scholar] [CrossRef]
- Zhang, L.L.; Zhang, J.; Zhang, L.M.; Tang, W.H. Stability Analysis of Rainfall-Induced Slope Failure: A Review. Proc. Inst. Civ. Eng.-Geotech. Eng. 2011, 164, 299–316. [Google Scholar] [CrossRef]
- Zhang, X.; Krabbenhoft, K.; Sheng, D.; Li, W. Numerical Simulation of a Flow-like Landslide Using the Particle Finite Element Method. Comput. Mech. 2015, 55, 167–177. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y. Probabilistic Simulation of Entire Process of Rainfall-Induced Landslides Using Random Finite Element and Material Point Methods with Hydro-Mechanical Coupling. Comput. Geotech. 2021, 132, 103989. [Google Scholar] [CrossRef]
- He, X.; Liang, D.; Bolton, M.D. Run-out of Cut-Slope Landslides: Mesh-Free Simulations. Geotechnique 2018, 68, 50–63. [Google Scholar] [CrossRef] [Green Version]
- Bandara, S.; Soga, K. Coupling of Soil Deformation and Pore Fluid Flow Using Material Point Method. Comput. Geotech. 2015, 63, 199–214. [Google Scholar] [CrossRef]
- Bandara, S.; Ferrari, A.; Laloui, L. Modelling Landslides in Unsaturated Slopes Subjected to Rainfall Infiltration Using Material Point Method. Int. J. Numer. Anal. Methods Geomech. 2016, 40, 1358–1380. [Google Scholar] [CrossRef]
- Wang, B.; Vardon, P.J.; Hicks, M.A. Rainfall-Induced Slope Collapse with Coupled Material Point Method. Eng. Geol. 2018, 239, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, A.; Babu, G.L.S.; Haldar, S. Influence of Spatial Variability of Permeability Property on Steady State Seepage Flow and Slope Stability Analysis. Eng. Geol. 2010, 110, 93–101. [Google Scholar] [CrossRef]
- Li, H.; Zhou, J.; Mou, X.; Guo, H.; Wang, X.; An, H.; Mo, Q.; Long, H.; Dang, C.; Wu, J. Pore Structure and Fractal Characteristics of the Marine Shale of the Longmaxi Formation in the Changning Area, Southern Sichuan Basin, China. Front. Earth Sci. 2022, 10, 1018274. [Google Scholar] [CrossRef]
- Egbueri, J.C.; Igwe, O. The Impact of Hydrogeomorphological Characteristics on Gullying Processes in Erosion-Prone Geological Units in Parts of Southeast Nigeria. Geol. Ecol. Landsc. 2021, 5, 227–240. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.E. Probabilistic Analysis of Seepage That Considers the Spatial Variability of Permeability for an Embankment on Soil Foundation. Eng. Geol. 2012, 133–134, 30–39. [Google Scholar] [CrossRef]
- Huang, J.; Fenton, G.; Griffiths, D.V.; Li, D.; Zhou, C. On the Efficient Estimation of Small Failure Probability in Slopes. Landslides 2017, 14, 491–498. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, T.; Hu, Y.; Phoon, K.-K. Simulation of Random Fields with Trend from Sparse Measurements without Detrending. J. Eng. Mech. 2019, 145, 04018130. [Google Scholar] [CrossRef]
- Kang, F.; Xu, Q.; Li, J. Slope Reliability Analysis Using Surrogate Models via New Support Vector Machines with Swarm Intelligence. Appl. Math. Model. 2016, 40, 6105–6120. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Cheng, Y.-M.; Liang, L. Advanced Reliability Analysis of Slopes in Spatially Variable Soils Using Multivariate Adaptive Regression Splines. Geosci. Front. 2019, 10, 671–682. [Google Scholar] [CrossRef]
- He, X.; Xu, H.; Sabetamal, H.; Sheng, D. Machine Learning Aided Stochastic Reliability Analysis of Spatially Variable Slopes. Comput. Geotech. 2020, 126, 103711. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Z.; Liu, Y.; Liao, J. The Material Point Method: A Continuum-Based Particle Method for Extreme Loading Cases; Elsevier Science & Technology: San Diego, CA, USA, 2016; pp. 196–205. ISBN 9780124077164. [Google Scholar]
- Systèmes, D. Abaqus/CAE User’s Manual; Dassault Systèmes Simulia Corp: Providence, RI, USA, 2014. [Google Scholar]
- Arifin, Y.F.; Schanz, T. Osmotic Suction of Highly Plastic Clays. Acta Geotech. 2009, 4, 177–191. [Google Scholar] [CrossRef]
- Borja, R.I.; White, J.A. Continuum Deformation and Stability Analyses of a Steep Hillside Slope under Rainfall Infiltration. Acta Geotech. 2010, 5, 1–14. [Google Scholar] [CrossRef]
- Fredlund, D.G. Unsaturated Soil Mechanics in Engineering Practice. J. Geotech. Geoenviron. Eng. 2006, 132, 286–321. [Google Scholar] [CrossRef] [Green Version]
- Mukhlisin, M.; Taha, M.R.; Kosugi, K. Numerical Analysis of Effective Soil Porosity and Soil Thickness Effects on Slope Stability at a Hillslope of Weathered Granitic Soil Formation. Geosci. J. 2008, 12, 401–410. [Google Scholar] [CrossRef]
- Sheng, D.; Zhou, A.-N. Coupling Hydraulic with Mechanical Models for Unsaturated Soils. Can. Geotech. J. 2011, 48, 826–840. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, L.M.; Xiao, T. Evaluating Stability of Anisotropically Deposited Soil Slopes. Can. Geotech. J. 2019, 56, 753–760. [Google Scholar] [CrossRef]
- Le, T.M.H.; Gallipoli, D.; Sanchez, M.; Wheeler, S. Rainfall-Induced Differential Settlements of Foundations on Heterogeneous Unsaturated Soils. Géotechnique 2013, 63, 1346–1355. [Google Scholar] [CrossRef] [Green Version]
- Marks, B.; Eriksen, J.A.; Dumazer, G.; Sandnes, B.; Måløy, K.J. Size Segregation of Intruders in Perpetual Granular Avalanches. J. Fluid Mech. 2017, 825, 502–514. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Su, Z.; Cheng, Q.; Ren, Y.; Cai, F. High Mobility of Rock-Ice Avalanches: Insights from Small Flume Tests of Gravel-Ice Mixtures. Eng. Geol. 2019, 260, 105260. [Google Scholar] [CrossRef]
- Sandwell, D.T. Biharmonic Spline Interpolation of GEOS-3 and Seasat Altimeter Data. Deep. Sea Res. Part B Oceanogr. Lit. Rev. 1987, 34, 763. [Google Scholar] [CrossRef] [Green Version]
- Cascini, L.; Cuomo, S.; di Mauro, A.; di Natale, M.; di Nocera, S.; Matano, F. Multidisciplinary Analysis of Combined Flow-like Mass Movements in a Catchment of Southern Italy. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2021, 15, 41–58. [Google Scholar] [CrossRef]
- Zhao, N.; Yan, E.; Cai, J. A Quasi Two-Dimensional Friction-Thermo-Hydro-Mechanical Model for High-Speed Landslides. Eng. Geol. 2018, 246, 198–211. [Google Scholar] [CrossRef]
- van Asch, T.W.J.; Malet, J.-P.; van Beek, L.P.H. Influence of Landslide Geometry and Kinematic Deformation to Describe the Liquefaction of Landslides: Some Theoretical Considerations. Eng. Geol. 2006, 88, 59–69. [Google Scholar] [CrossRef]
- Llano-Serna, M.A.; Farias, M.M.; Pedroso, D.M. An Assessment of the Material Point Method for Modelling Large Scale Run-out Processes in Landslides. Landslides 2016, 13, 1057–1066. [Google Scholar] [CrossRef]
- van Genuchten, M.T. A Closed-Form Equation for Predicting the Hydraulic Conductivity of Unsaturated Soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef]
- Gardner, W.R. Some Steady-State Solutions of the Unsaturated Moisture Flow Equation with Application to Evaporation from a Water Table. Soil Sci. 1958, 85, 228–232. [Google Scholar] [CrossRef]
- Müller, S.; Schüler, L.; Zech, A.; Heße, F. GSTools v1.3: A Toolbox for Geostatistical Modelling in Python. Geosci. Model Dev. Discuss. 2021, 2021, 1–33. [Google Scholar] [CrossRef]
- He, X.; Wang, F.; Li, W.; Sheng, D. Deep Learning for Efficient Stochastic Analysis with Spatial Variability. Acta Geotech. 2021, 17, 1031–1051. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations (ICLR 2015), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Young’s modulus | 100 MPa |
| Poisson’s ratio | 0.3 |
| Cohesion in Drucker–Prager | 10 kPa |
| Friction angle in Drucker–Prager | 35° |
| Dilation angle | 0° |
| Soil particle density | 2650 kg/m3 |
| Water density | 1000 kg/m3 |
| Initial porosity | 0.3 |
| Rainfall intensity | 0.018 m/h |
| Duration | 20 h |
| Initial matric suction | 20 kPa |
| Hydraulic conductivity | 0.036 m/h |
| SWCC parameter | 0.31 m−1 |
| SWCC parameter | 1.19 |
| Hydraulic conductivity parameter | 1.962 m−1 |
| Test Label | Top | Middle | Bottom | Mean | Max | |
|---|---|---|---|---|---|---|
| Cohesion (kPa) | D1 | 5 | 7.5 | 10 | 7.5 | 10 |
| D2 | 7.5 | 10 | 12.5 | 10 | 12.5 | |
| D3 | 5 | 10 | 15 | 10 | 15 | |
| D4 | 15 | 20 | 25 | 20 | 25 | |
| Friction angle (°) | F1 | 31 | 33 | 35 | 33 | 35 |
| F2 | 34 | 35 | 36 | 35 | 36 | |
| F3 | 33 | 35 | 37 | 35 | 37 | |
| F4 | 35 | 37 | 39 | 37 | 39 | |
| Soil particle density (kg/ m3) | R1 | 2250 | 2450 | 2650 | 2450 | 2650 |
| R2 | 2550 | 2650 | 2750 | 2650 | 2750 | |
| R3 | 2450 | 2650 | 2850 | 2650 | 2850 | |
| R4 | 2650 | 2850 | 3050 | 2850 | 3050 |
| Parameter | COV | |||
|---|---|---|---|---|
| Cohesion | 10 kPa | 0.1 | 16 m | 8 m |
| Friction angle | 35° | 0.05 | 16 m | 8 m |
| Soil particle density | 2650 kg/m3 | 0.05 | 16 m | 8 m |
| Hydraulic conductivity | 0.036 m/h | 0.3 | 16 m | 8 m |
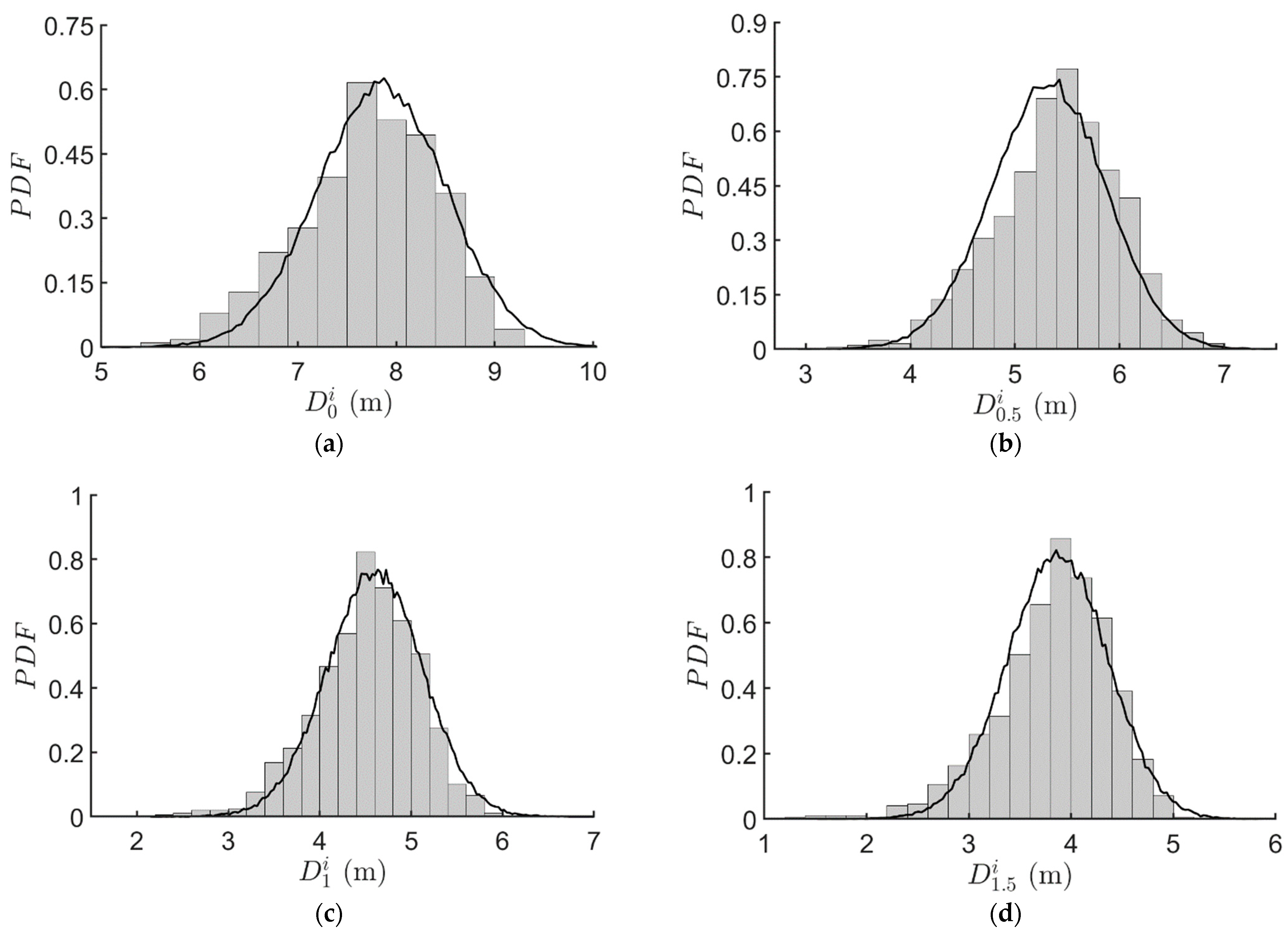
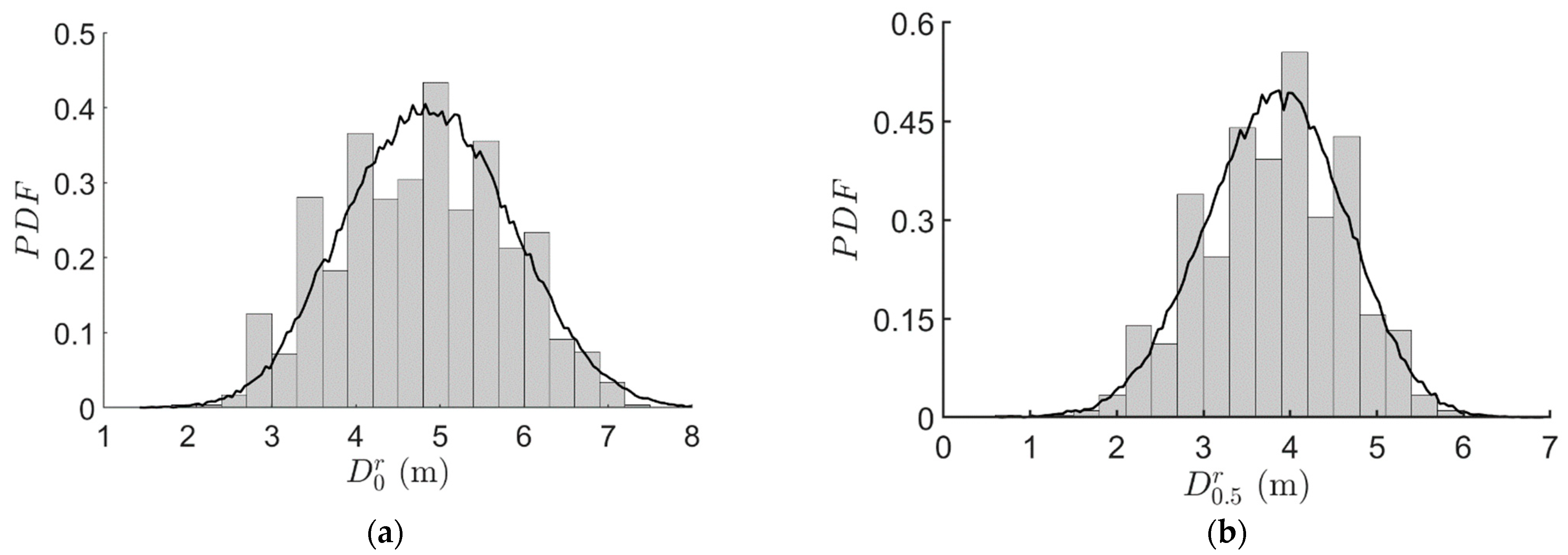
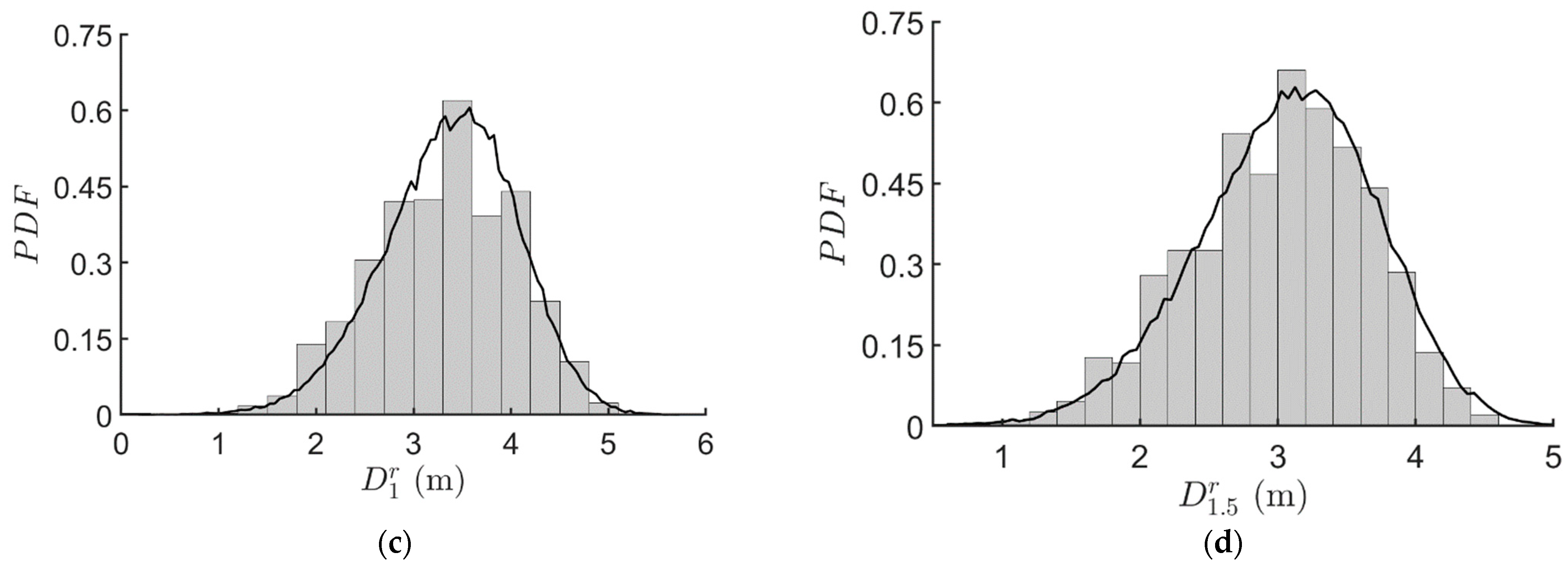
| Random Variable of Interest | Brute-Force Analysis | Machine-Learning-Aided | ||
|---|---|---|---|---|
| Mean | Standard Deviation | Mean | Standard Deviation | |
| 7.72 m | 0.72 m | 7.85 m | 0.66 m | |
| 5.40 m | 0.60 m | 5.32 m | 0.55 m | |
| 3.81 m | 0.58 m | 3.86 m | 0.49 m | |
| 4.79 m | 1.02 m | 4.88 m | 0.97 m | |
| 3.80 m | 0.82 m | 3.82 m | 0.80 m | |
| 3.32 m | 0.73 m | 3.37 m | 0.68 m | |
| 3.00 m | 0.65 m | 3.07 m | 0.65 m | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; He, X.; Sheng, D. Rainfall-Induced Landslides from Initialization to Post-Failure Flows: Stochastic Analysis with Machine Learning. Mathematics 2022, 10, 4426. https://doi.org/10.3390/math10234426
Xu H, He X, Sheng D. Rainfall-Induced Landslides from Initialization to Post-Failure Flows: Stochastic Analysis with Machine Learning. Mathematics. 2022; 10(23):4426. https://doi.org/10.3390/math10234426
Chicago/Turabian StyleXu, Haoding, Xuzhen He, and Daichao Sheng. 2022. "Rainfall-Induced Landslides from Initialization to Post-Failure Flows: Stochastic Analysis with Machine Learning" Mathematics 10, no. 23: 4426. https://doi.org/10.3390/math10234426
APA StyleXu, H., He, X., & Sheng, D. (2022). Rainfall-Induced Landslides from Initialization to Post-Failure Flows: Stochastic Analysis with Machine Learning. Mathematics, 10(23), 4426. https://doi.org/10.3390/math10234426