
Water-Cycle-Algorithm-Tuned Intelligent Fuzzy Controller for Stability of Multi-Area Multi-Fuel Power System with Time Delays

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
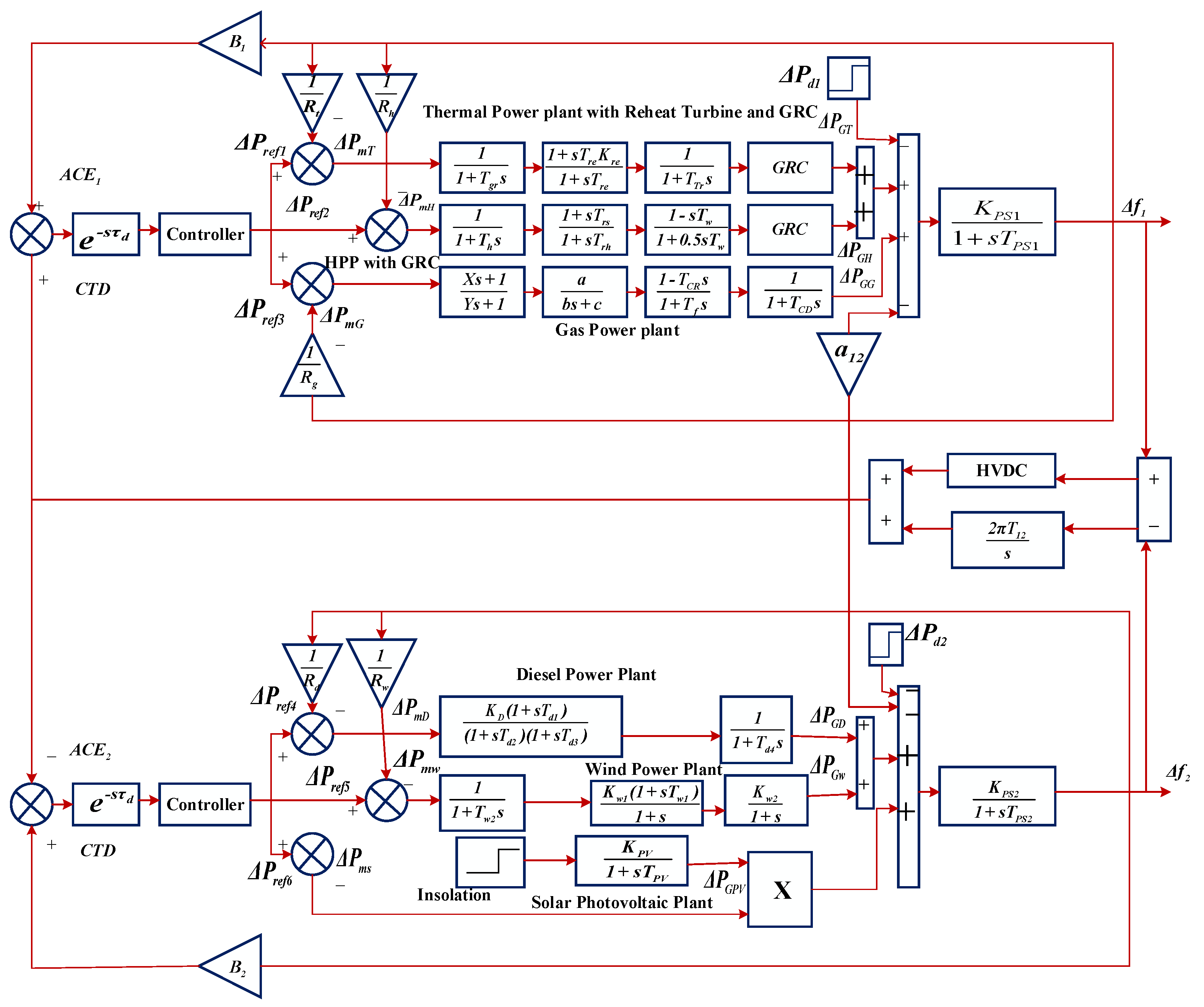
- An LFC for a MAMF IPS depicted in Figure 1 is developed in MATLAB/Simulink version R2016a.
- A WCA-based FPID is presented as a frequency regulator whose efficacy is revealed compared to conventional PIDD/PID controllers.
- System non-linearity constraints of GRC and CTDs are considered, to conduct research that is close to realistic practice.
- The effect of CTDs on the MAMF IPS performance is visualized and justified.
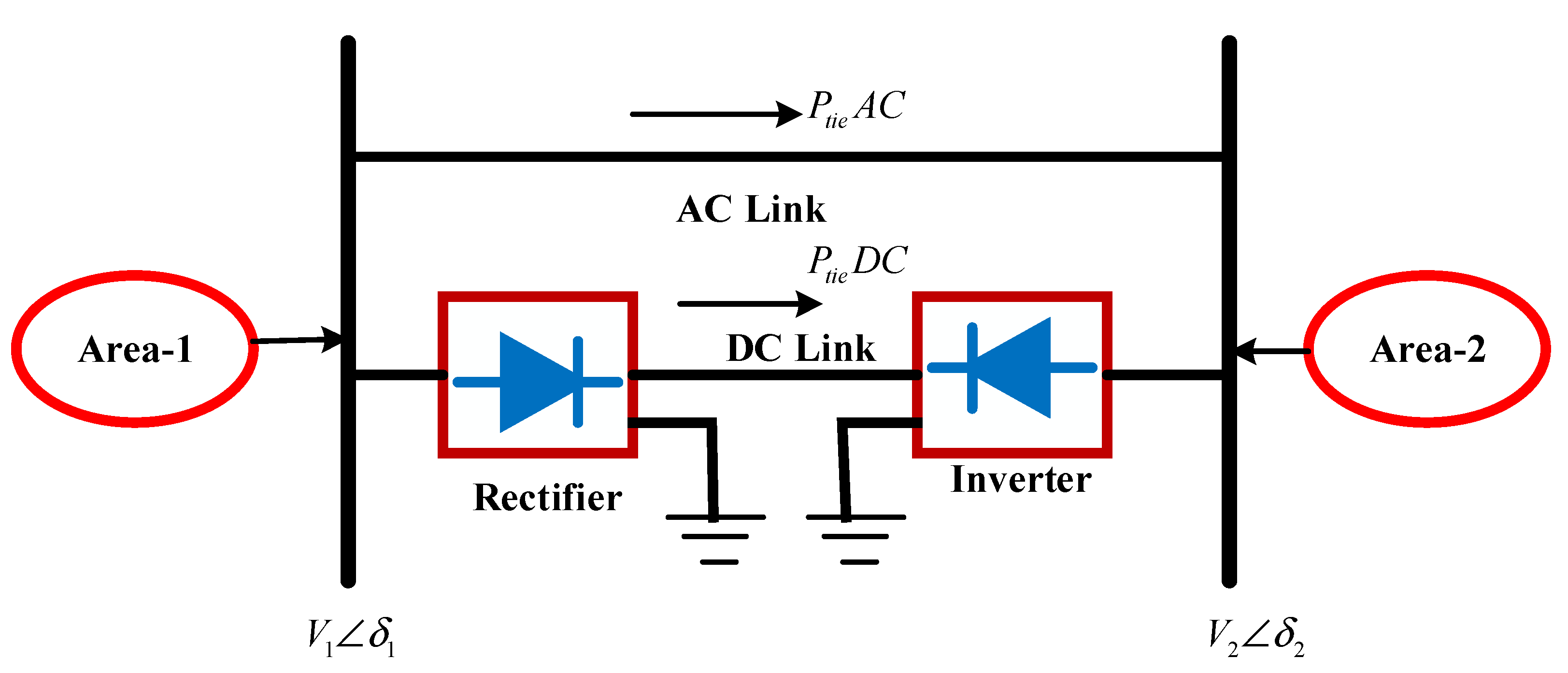
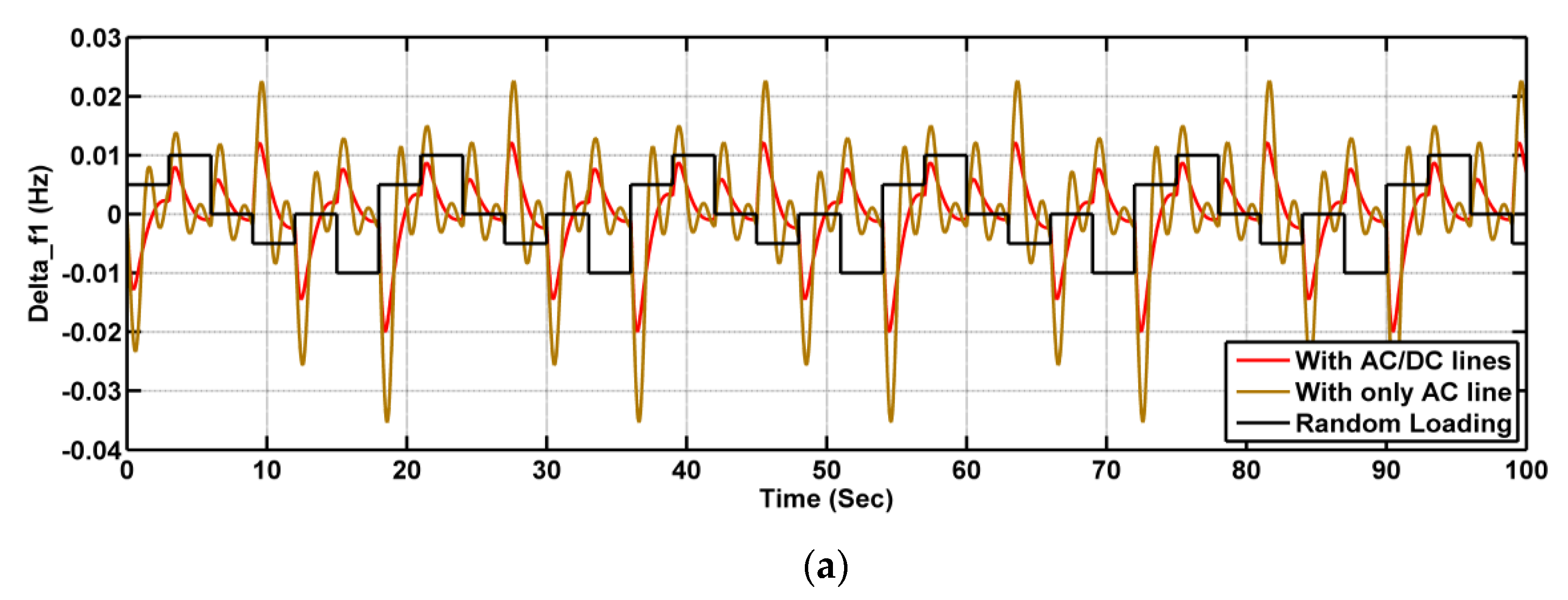
- The territorial control strategy of AC/DC lines is employed to further enhance the MAMF system dynamical behaviour.
- The robustness of the presented control schemes is validated by subjecting the MAMF system to a wide range of load fluctuations in both areas.
2. Power System Model
3. Communication Time Delays
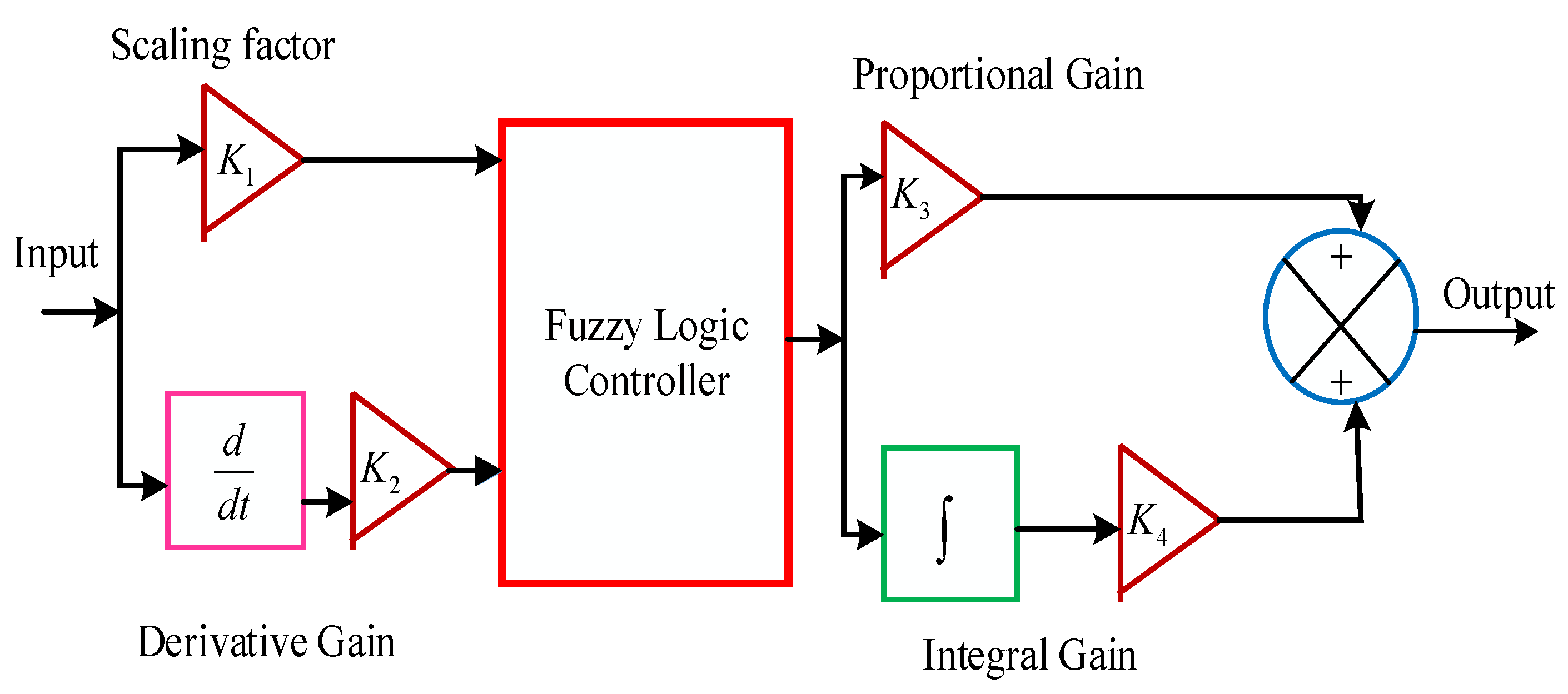
4. Controller and Objective Function
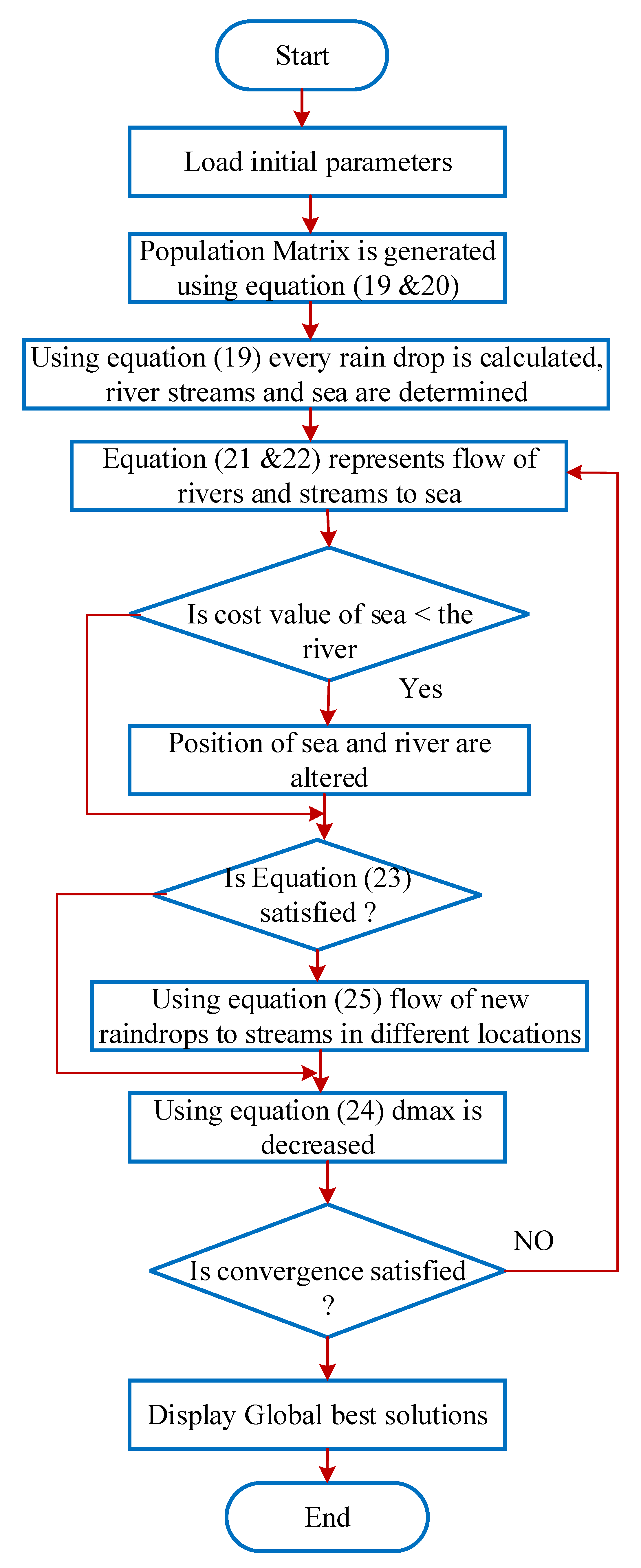
5. Water Cycle Algorithm
6. Simulation Results
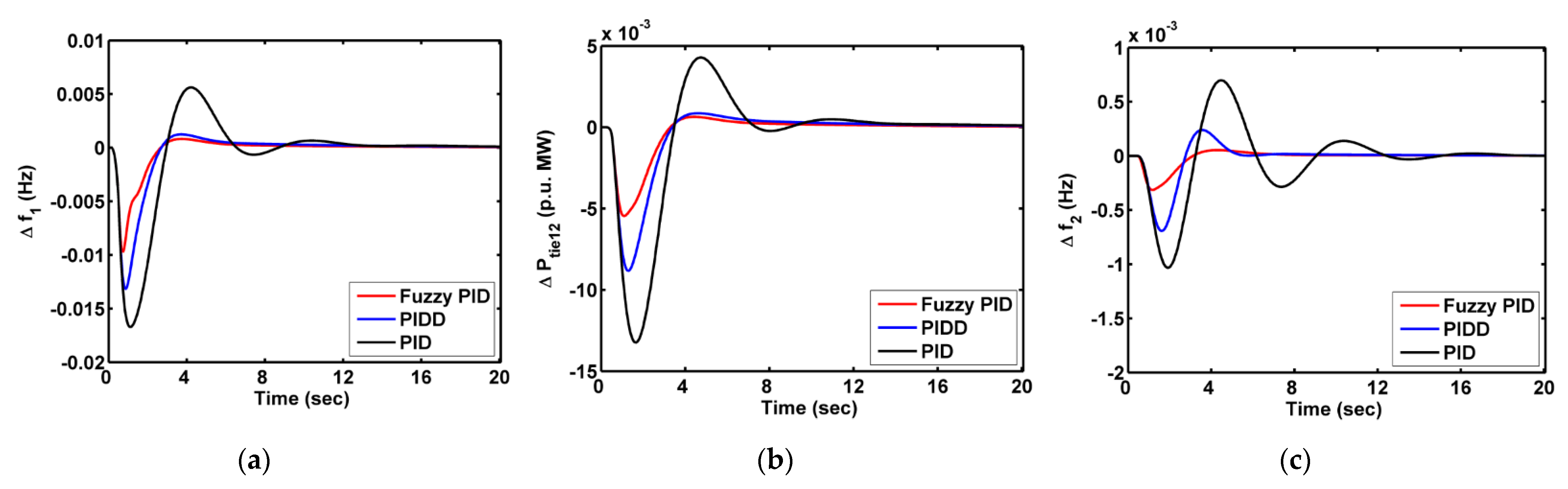
6.1. Case 1: Analysis of MAMF System without Considering CTDs
6.2. Case 2: Analysis of MAMF System with CTDs Considered
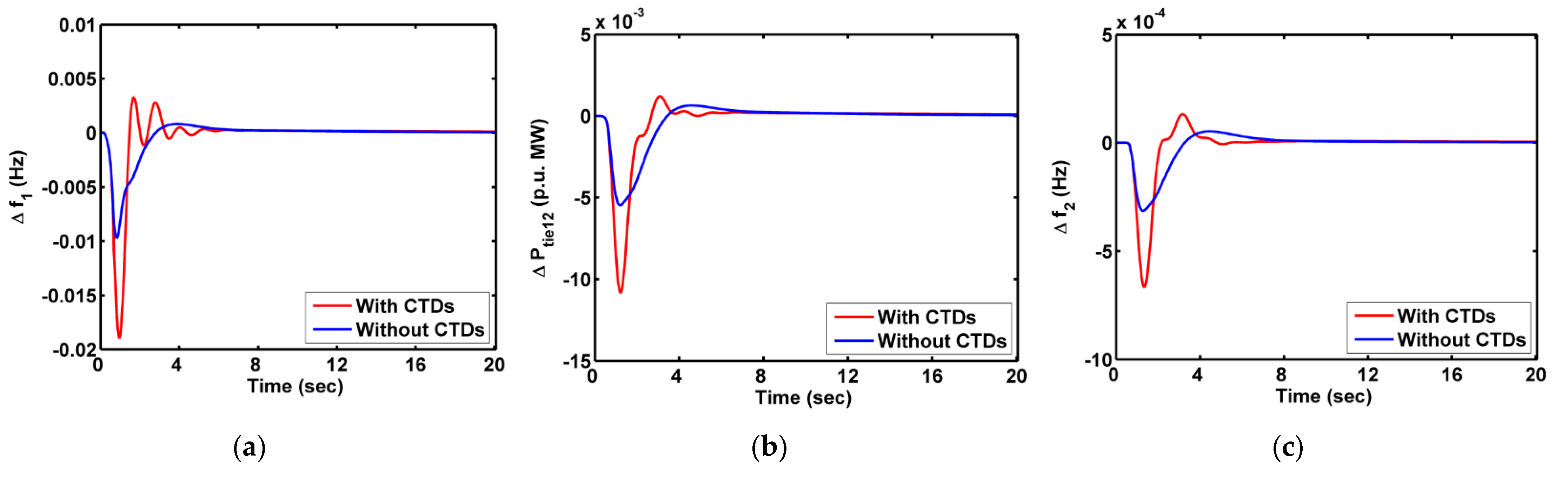
6.3. Case 3: Comparative Analysis of MAMF System Responses without and with Consideration of CTDs
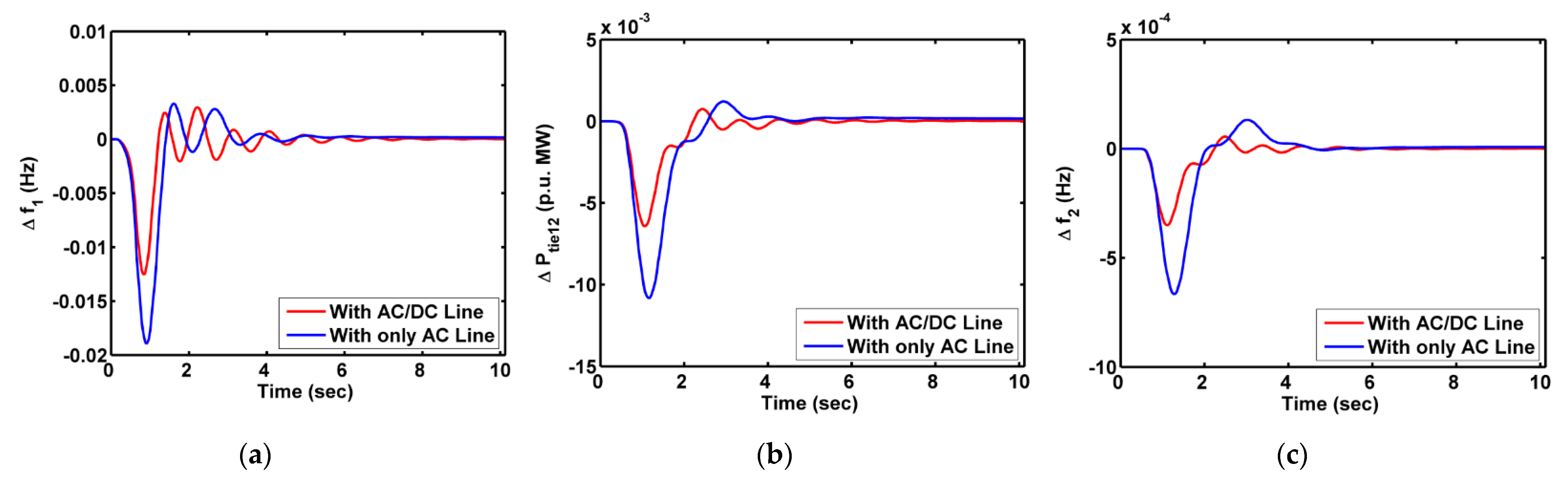
6.4. Case 4: Analysis of MAMF System with AC/DC Lines
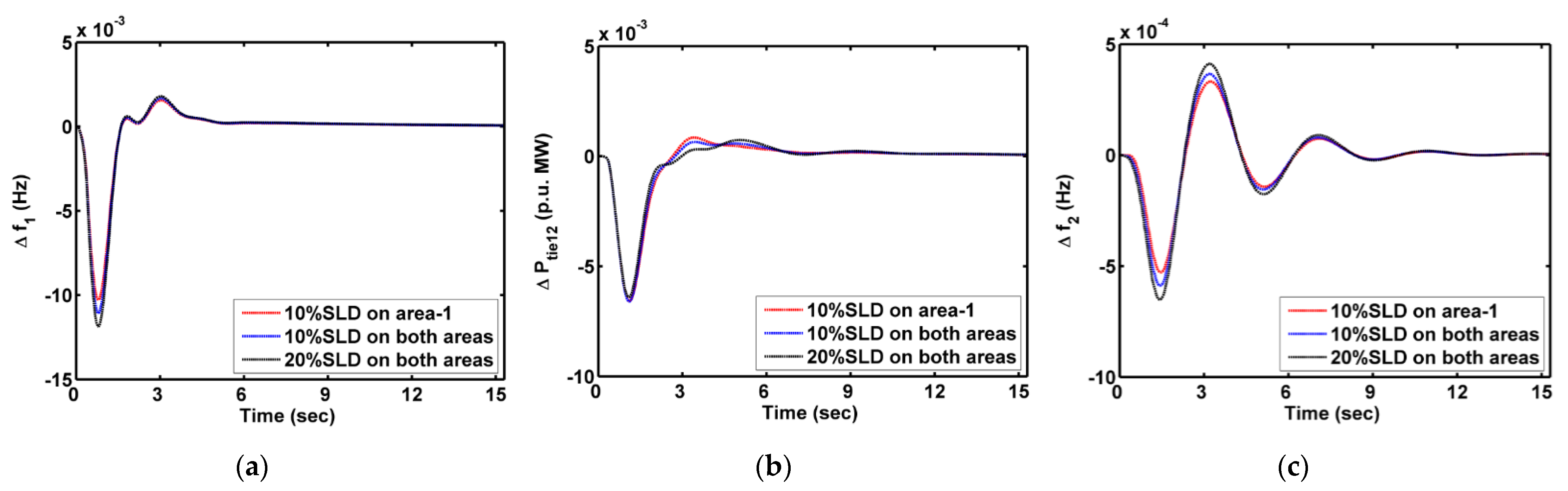
6.5. Case 5: Robustness Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SLD | Step load disturbance |
| AGC | Automatic generation control |
| CTDs | Communication time delays |
| IPS | Interconnected power system |
| LFC | Load frequency control |
| DG | Distributed generation |
| MAMF | Multi-area multi-fuel |
| GDB | Governor dead band |
| GRC | Generation rate constraint |
| HVDC | High-voltage DC line |
| WCA | Water cycle algorithm |
| COG | Center of gravity |
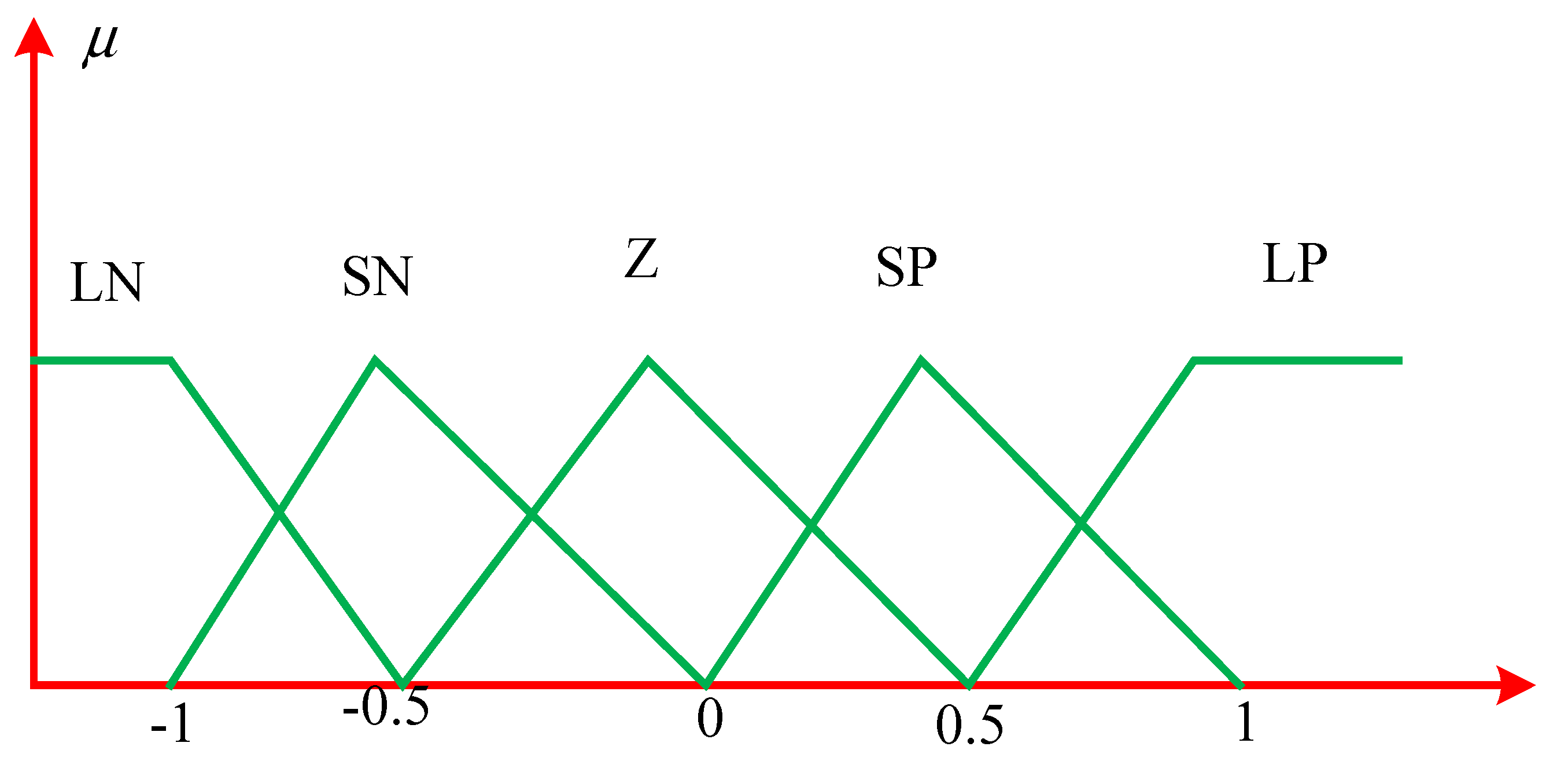
| MFs | Membership functions |
| ISE | Integral square error |
| ACE | Area control error |
References
- Cohen, N. Some aspects of tie-line bias control on interconnected power systems. Trans. Am. Inst. Electr. Eng. Part III Power Appar. Syst. 1957, 75, 1415–1436. [Google Scholar]
- Elgerd, O.; Fosha, E. Optimum megawatt-frequency control of multi-area electric energy systems. IEEE Trans. Power Appar. Syst. 1970, 84, 556–563. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.; Das, D.C.; Ustun, T.S. State-of-the-art of controllers and soft computing techniques for regulated load frequency management of single/multi-area traditional and renewable energy based power systems. Appl. Energy 2020, 266, 114858. [Google Scholar] [CrossRef]
- Chandrakala, K.R.M.V.; Balamurugan, S. Simulated annealing based optimal frequency and terminal voltage control of multi-source multi area system. Int. J. Electr. Power Energy Syst. 2016, 78, 823–829. [Google Scholar] [CrossRef]
- Dogan, A. Load frequency control of two area and multi source power system using grey wolf optimization algorithm. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 28–30 November 2019; pp. 81–84. [Google Scholar]
- Elsaied, M.M.; Attia, M.A.; Mostafa, M.A.; Mekhamer, S.F. Application of different optimization techniques to load frequency control with WECS in a multi-area system. Electr. Power Compon. Syst. 2018, 46, 739–756. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Application of backtracking search algorithm in load frequency control of multi-area interconnected power system. Ain Shams Eng. J. 2018, 19, 257–276. [Google Scholar] [CrossRef] [Green Version]
- Shabani, H.; Vahidi, B.; Ebrahimpour, M. A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans. 2013, 52, 88–95. [Google Scholar] [CrossRef] [PubMed]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Study of differential search algorithm based automatic generation control of an interconnected thermal-thermal system with governor dead-band. Appl. Soft Comput. 2017, 52, 160–175. [Google Scholar] [CrossRef]
- Dewangan, S.; Prakash, T.; Singh, V.P. Design and performance analysis of elephant herding optimization based controller for load frequency control in thermal interconnected power system. Optim. Control. Appl. Methods 2021, 42, 144–159. [Google Scholar] [CrossRef]
- Chaine, S.; Tripathy, M.; Jain, D. Non dominated cuckoo search algorithm optimized controllers to improve the frequency regulation characteristics of wind thermal power system. Eng. Sci. Technol. Int. J. 2017, 20, 1092–1105. [Google Scholar] [CrossRef]
- Abid-Elazim, S.M.; Ali, E.S. Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Comput. Appl. 2018, 30, 607–616. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Whale optimization algorithm applied to load frequency control of a mixed power system considering nonlinearities and PLL dynamics. Energy Syst. 2020, 11, 699–728. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Coordinated control strategy for simultaneous frequency and voltage stabilization of the multi-area interconnected system considering communication time delays. Int. J. Ambient Energy 2021, 1–13. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Bornapour, M.; Gharaei, M.A. Grasshopper optimization algorithm for optimal load frequency control considering predictive function al modified PID controller in restructured multi-resource multi-area power system with redox flow battery units. Control. Eng. Pract. 2019, 89, 204–227. [Google Scholar] [CrossRef]
- Sobhanam, A.P.; Mary, P.M.; Mariasiluvairaj, W.I.; Wilson, R.D. Automatic generation control using an improved artificial electric field in multi-area power system. IETE J. Res. 2021, 1–13. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Combined frequency and voltage stabilization of multi-area multisource system by DE-AEFA optimized PID controller with coordinated performance of IPFC and RFBs. Int. J. Ambient Energy 2020, 1–17. [Google Scholar] [CrossRef]
- Sharma, J.; Hote, Y.V.; Prasad, R. Robust PID load frequency controller design with specific gain and phase margin for multi-area power systems. IFAC-Pap. 2018, 51, 627–632. [Google Scholar] [CrossRef]
- Tasnin, W.; Saikia, L.C. Comparative performance of different energy storage devices in AGC of multi-source system including geothermal power plant. J. Renew. Sustain. Energy 2018, 10, 024101. [Google Scholar] [CrossRef]
- Arya, Y. automatic generation control of two-area electrical power systems via optimal fuzzy classical controller. J. Frankl. Inst. 2018, 355, 2662–2688. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. Design and analysis of BFOA-optimized fuzzy PI/PID controller for AGC of multi-area traditional/restructured electrical power systems. Soft Comput. 2017, 21, 6435–6452. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Yegireddy, N.K. A novel hybrid DEPS optimized fuzzy PI/PID controller for load frequency control of multi-area interconnected power systems. J. Control Process 2014, 24, 1596–1608. [Google Scholar] [CrossRef]
- Sahu, P.C.; Prusty, R.C.; Panda, S. Approaching hybridized GWO-SCA based type-II fuzzy controller in AGC of diverse energy source multi area power system. J. King Saud Univ.-Eng. Sci. 2020, 32, 186–197. [Google Scholar] [CrossRef]
- Sahoo, D.K.; Sahu, R.K.; Sekhar, G.T.; Panda, S. A novel modified differential evolution algorithm optimized fuzzy proportional integral derivative controller for load frequency control with Thyristor controlled series compensator. J. Electr. Syst. Inf. Technol. 2018, 5, 944–963. [Google Scholar] [CrossRef]
- Pradhan, P.C.; Sahu, R.K.; Panda, S. Firefly algorithm optimized fuzzy PID controller for AGC of multi-area multi-source power systems with UPFC and SMES. Eng. Sci. Technol. Int. J. 2016, 19, 338–354. [Google Scholar] [CrossRef] [Green Version]
- Nayak, J.R.; Shaw, B.; Sahu, B.K. Application of adaptive-SOS (ASOS) algorithm based interval type-2 fuzzy-PID controller with derivative filter for automatic generation control of an interconnected power system. Eng. Sci. Technol. Int. J. 2018, 21, 465–485. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Zhang, Y.; Ye, X.; Xiong, X.; Zhang, F. A novel hybrid model based on an improved seagull optimization algorithm for short-term wind speed forecasting. Processes 2021, 9, 387. [Google Scholar] [CrossRef]
- Jain, M.; Rani, A.; Pachauri, N.; Singh, V.; Mittal, A.P. Design of fractional order 2-DOF PI controller for real-time control of heat flow experiment. Eng. Sci. Technol. Int. J. 2019, 22, 215–228. [Google Scholar] [CrossRef]
- Kalyan, C.N.S.; Rao, G.S. Frequency and voltage stabilization in combined load frequency control and automatic voltage regulation of multi area system with hybrid generation utilities by AC/DC links. Int. J. Sustain. Energy 2020, 39, 1009–1029. [Google Scholar] [CrossRef]
- Padhy, S.; Panda, S. A hybrid stochastic fractal search and pattern search technique based cascade PI-PD controller for automatic generation of multi-source power systems in presence of plug in electric vehicles. CAAI Trans. Intell. Technol. 2017, 2, 12–25. [Google Scholar] [CrossRef]
- Rajesh, K.S.; Dash, S.S.; Rajagopal, R. Hybrid improved firefly-pattern search optimized fuzzy aided PID controller for automatic generation control of power systems with multi-type generations. Swarm Evol. Comput. 2019, 44, 200–211. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K.; Tripathy, M. Load Frequency Control of Multi Source Multi-Area Nonlinear Power System with DE-PSO Optimized Fuzzy PID Controller in Coordination with SSSC and RFB. Int. J. Control. Autom. 2018, 11, 61–80. [Google Scholar] [CrossRef]
- Gheisarnejad, M. An effective hybrid harmony search and cuckoo optimization algorithm based fuzzy PID controller for load frequency control. Appl. Soft Comput. 2018, 65, 121–138. [Google Scholar] [CrossRef]
- Kouba, N.E.Y.; Menaa, M.; Hasni, M.; Boudour, M. A novel optimal combined fuzzy PID controller employing dragonfly algorithm for solving automatic generation control problem. Electr. Power Compon. Syst. 2018, 46, 2054–2070. [Google Scholar] [CrossRef]
- Eskander, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel meta-heuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ACE | ∆ACE | ||||
|---|---|---|---|---|---|
| LN | SN | Z | SP | LP | |
| LN | LN | LN | LN | SN | Z |
| SN | LN | LN | SN | Z | SP |
| Z | LN | SN | Z | SP | LP |
| SP | SN | Z | SP | LP | LP |
| LP | LP | Z | SP | LP | LP |
| Parameter | Value |
|---|---|
| 21 | |
| 100 | |
| C | 2 |
| U | 0.04 |
| 0.001 | |
| Max.iteration | 50 |
| Settling Time (in sec) | Case 1 | Case 2 | ||||
|---|---|---|---|---|---|---|
| FPID | PIDD | PID | FPID | PIDD | PID | |
| ∆f1 | 7.56 | 8.95 | 12.69 | 9.721 | 11.88 | 15.97 |
| ∆Ptie12 | 10.160 | 11.46 | 13.21 | 11.23 | 12.40 | 14.26 |
| ∆f2 | 8.322 | 11.80 | 14.89 | 9.834 | 13.16 | 16.39 |
| ISE × 10−3 | 7.769 | 19.893 | 36.355 | 29.275 | 52.283 | 85.098 |
| Controller | Area 1 | Area 2 | ||||
|---|---|---|---|---|---|---|
| FPID | PIDD | PID | FPID | PIDD | PID | |
| Case 1 | K1 = 0.5757 K2 = 0.7573 K3 = 0.8315 K4 = 0.3394 | KP = 2.0755 KI = 1.1281 KD = 0.7329 KDD = 0.1430 | KP = 3.1388 KI = 2.0944 KD = 1.4939 | K1 = 0.8861 K2 = 0.6994 K3 = 0.8606 K4 = 0.3766 | KP = 1.9575 KI = 1.6113 KD = 0.5889 KDD = 0.1495 | KP = 2.9936 KI = 1.8112 KD = 0.8632 |
| Case 2 | K1 = 0.5014 K2 = 0.7113 K3 = 0.6592 K4 = 0.4588 | KP = 1.8098 KI = 1.2760 KD = 0.9630 KDD = 0.0607 | KP = 2.9861 KI = 1.9060 KD = 1.1464 | K1 = 0.8130 K2 = 0.8248 K3 = 0.6416 K4 = 0.4268 | KP = 1.9623 KI = 1.2260 KD = 0.6232 KDD = 0.4939 | KP = 3.0283 KI = 2.0519 KD = 0.8964 |
| Parameter | ∆f1 | ∆Ptie12 | ∆f2 | ISE × 10−3 |
|---|---|---|---|---|
| With AC line only | 9.721 | 11.23 | 9.834 | 29.275 |
| With AC/DC lines | 7.758 | 6.746 | 7.112 | 17.362 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalyan, C.N.S.; Goud, B.S.; Bajaj, M.; Kumar, M.K.; Ahmed, E.M.; Kamel, S. Water-Cycle-Algorithm-Tuned Intelligent Fuzzy Controller for Stability of Multi-Area Multi-Fuel Power System with Time Delays. Mathematics 2022, 10, 508. https://doi.org/10.3390/math10030508
Kalyan CNS, Goud BS, Bajaj M, Kumar MK, Ahmed EM, Kamel S. Water-Cycle-Algorithm-Tuned Intelligent Fuzzy Controller for Stability of Multi-Area Multi-Fuel Power System with Time Delays. Mathematics. 2022; 10(3):508. https://doi.org/10.3390/math10030508
Chicago/Turabian StyleKalyan, CH. Naga Sai, B. Srikanth Goud, Mohit Bajaj, Malligunta Kiran Kumar, Emad M. Ahmed, and Salah Kamel. 2022. "Water-Cycle-Algorithm-Tuned Intelligent Fuzzy Controller for Stability of Multi-Area Multi-Fuel Power System with Time Delays" Mathematics 10, no. 3: 508. https://doi.org/10.3390/math10030508
APA StyleKalyan, C. N. S., Goud, B. S., Bajaj, M., Kumar, M. K., Ahmed, E. M., & Kamel, S. (2022). Water-Cycle-Algorithm-Tuned Intelligent Fuzzy Controller for Stability of Multi-Area Multi-Fuel Power System with Time Delays. Mathematics, 10(3), 508. https://doi.org/10.3390/math10030508