
Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators



Abstract
:1. Introduction
2. Riemannian Manifold
2.1. Metric
2.2. Manifold Tools
- (a)
- Covariant space derivation .
- (b)
- Contravariant space derivation .
- (c)
- Relationship between a vector basis , and its dual such that .
- (d)
- Components of the inverse mass tensor such that .
- (e)
- The connection is symmetric and defines the differentials and .
- (f)
- The relationship between covariant components and contravariant components is established through the metric: , .
- (g)
- Covariant differential of a vector field : .
- (h)
- Covariant differential of a covector field : .
- (i)
- Ricci’s identities
- (j)
- Covariant derivative of a scalar field: and .
- (k)
- Covariant derivative of a covector field : and .
- (l)
- Second covariant derivative of a scalar field V: becomes
- (m)
- Components of the Riemann curvature tensor:
- (n)
- Anti-symmetry of the Riemann curvature tensor: .
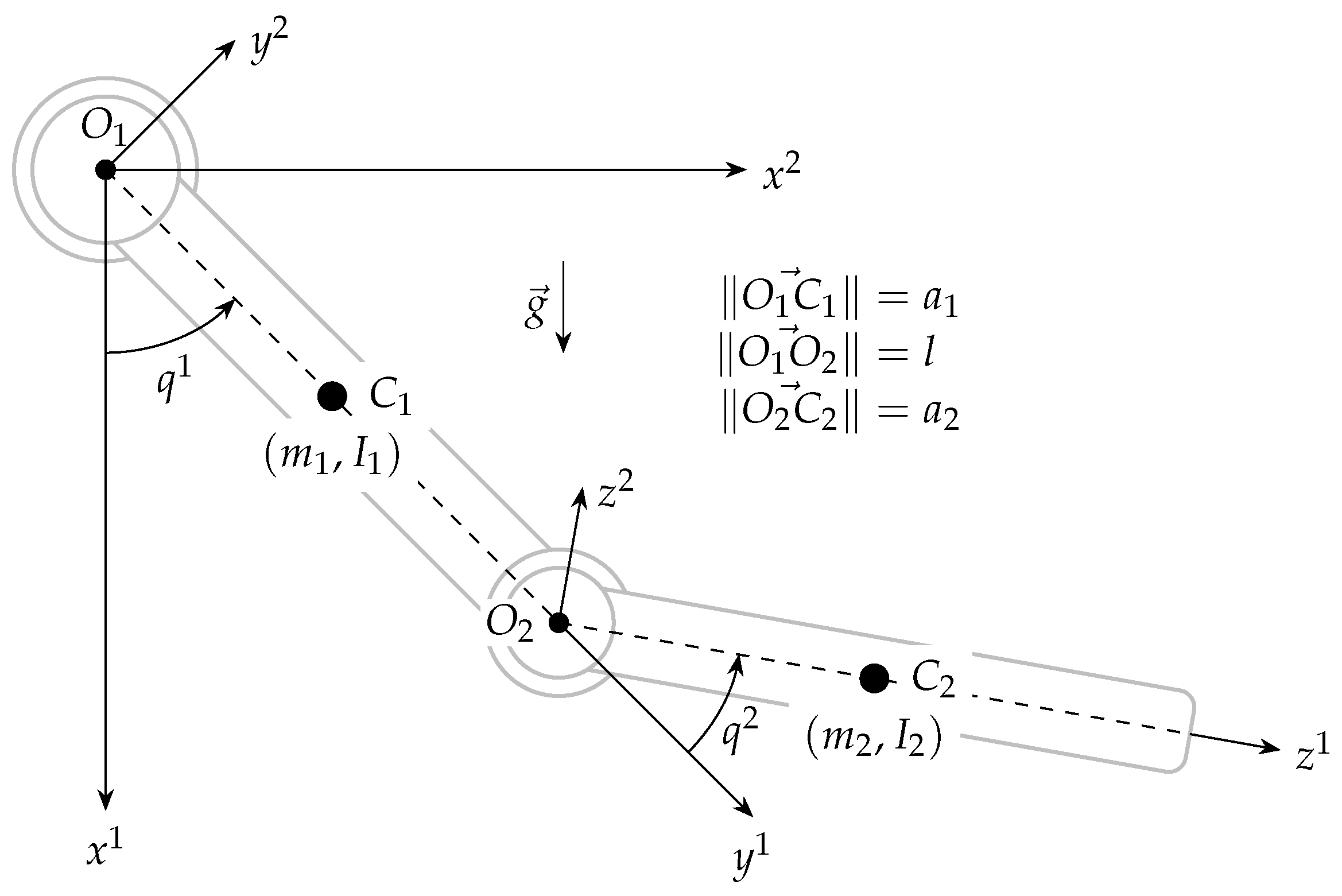
2.3. Manipulator Dynamics
3. Riemannian Formulation of Optimal Control Background
4. Optimal Dynamics with a Velocity Cost
4.1. Generalization of Covariant Control Equations Structure
4.2. Optimization Procedure
5. Optimal Dynamics through Pontryagin’s Maximum Principle
5.1. Pontryagin’s Maximum Principle
5.2. Optimization Procedure
6. Some Advantages of the Riemannian Formulation
6.1. Simulations Methodology
6.1.1. Running Cost Functions
6.1.2. Optimal Control Method
- If (15) is selected, there are two possibilities: either solve the second-order system (18) to directly find the main trajectory variables or, as proposed in [31], solve the following set of nonlinear first-order ODE:to find variables . Solving the system (49) also directly provides the main trajectory variables because (see Proposition 4 in [31]). It is important to remark that systems (18) and (49) are equivalent and lead to the same optimal trajectory when solved.
- If (20) is selected, there are also two possibilities. Either solve the set of nonlinear second-order ODE (30) to directly find the main trajectory variables or solve the set of nonlinear first-order ODE (46) to find variables . Again, solving the system (46) directly provides the main trajectory variables because (see Proposition 2). It is important to remark that systems (30) and (46) are equivalent and lead to the same optimal trajectory when solved (see Proposition 3). Without loss of generality, we will take the homogeneity factor as α = 1 m−2 s−2.
- All of the above should be submitted to fixed boundary values in positions and velocities:
6.1.3. Evaluation Methodology
- Step 1.
- By increasing T of for each test (beginning with s), solve the ODE system (49) when using ; (46) when using ; or the one resulting from (36) and (37) when using either or . Fixed boundary values are taken as follows to determine each solution.
- Case (a).
- Upward motion:
- Case (b).
- Downward motion:
- Step 2.
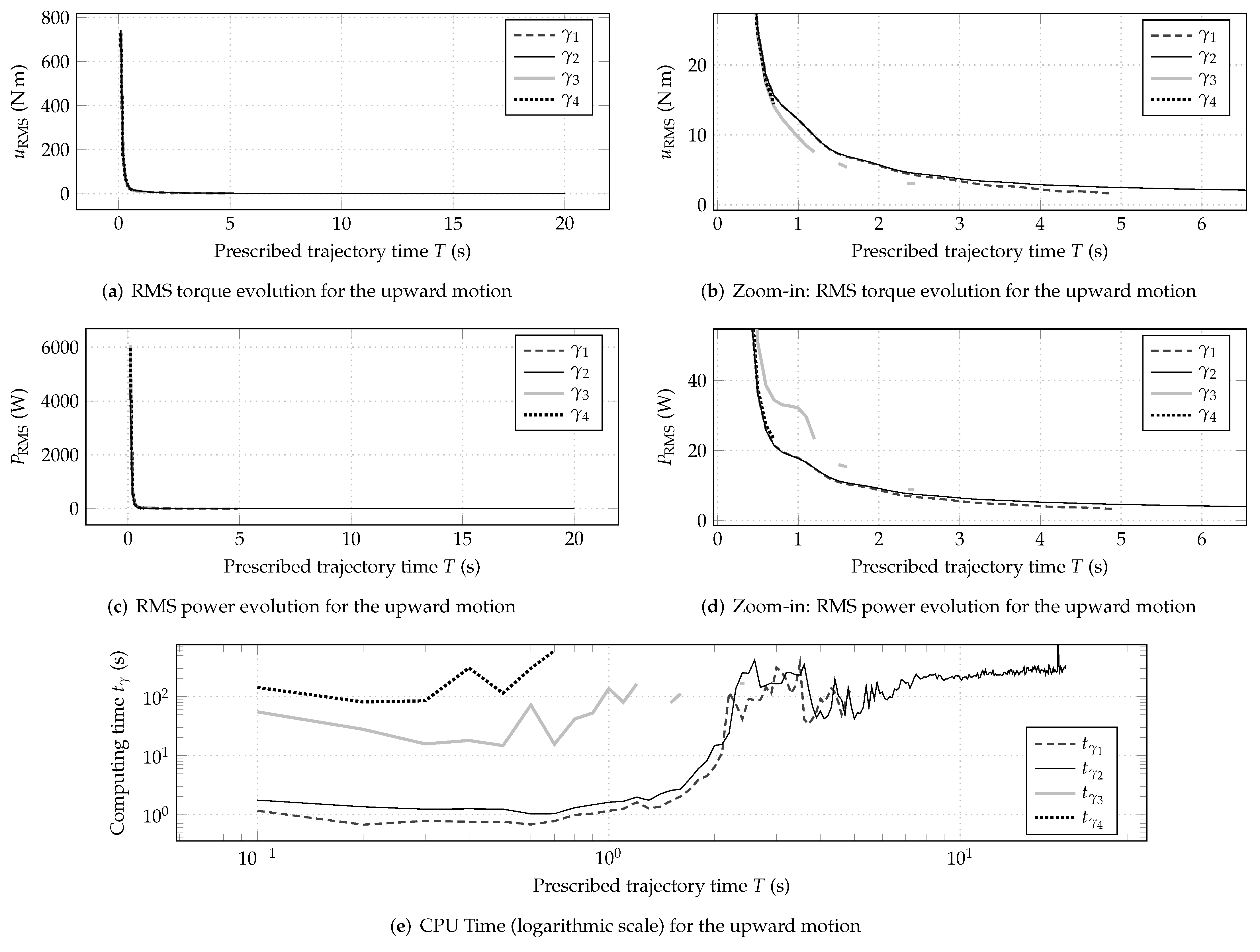
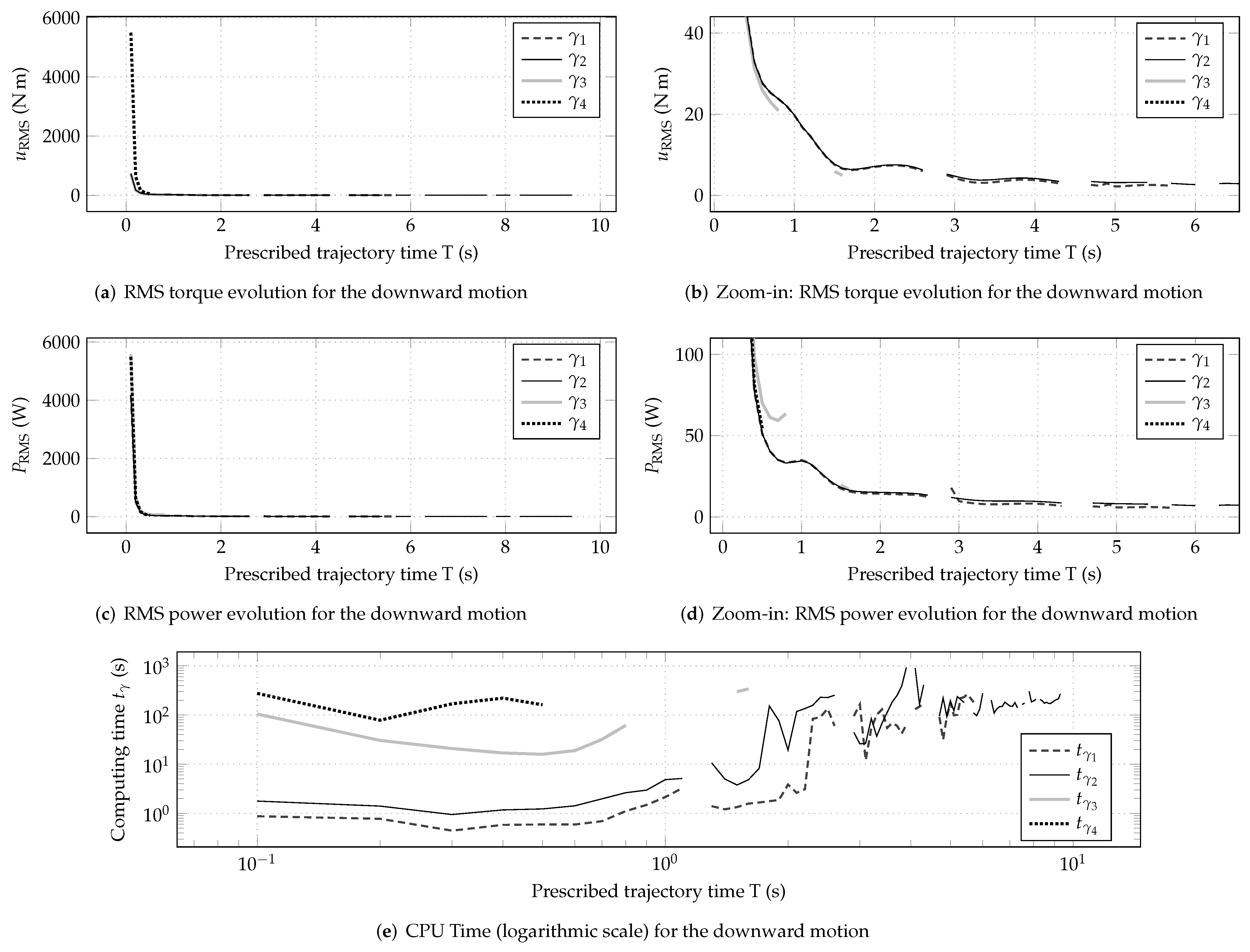
- Compute the Root Mean Square (RMS) torque for each trajectory as
- Step 3.
- Compute the RMS power for each trajectory as
- Step 4.
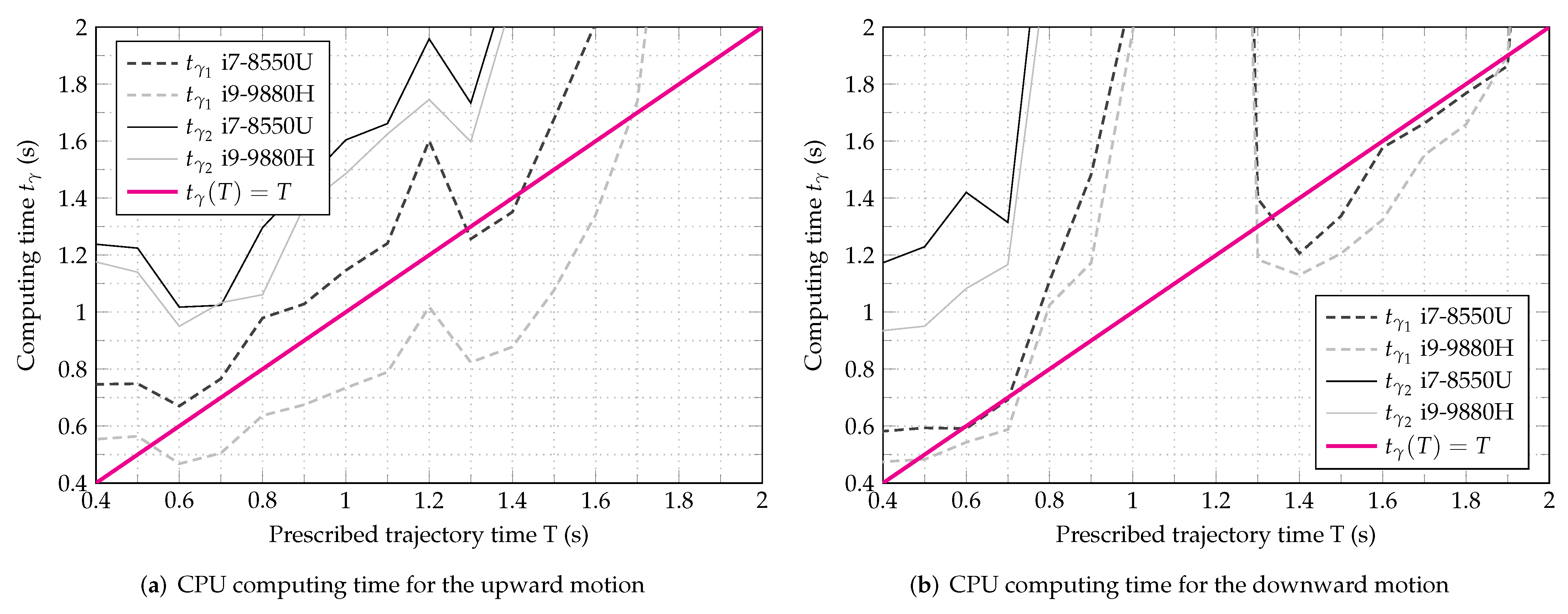
- Determine the computation time for each trajectory.
6.2. Results
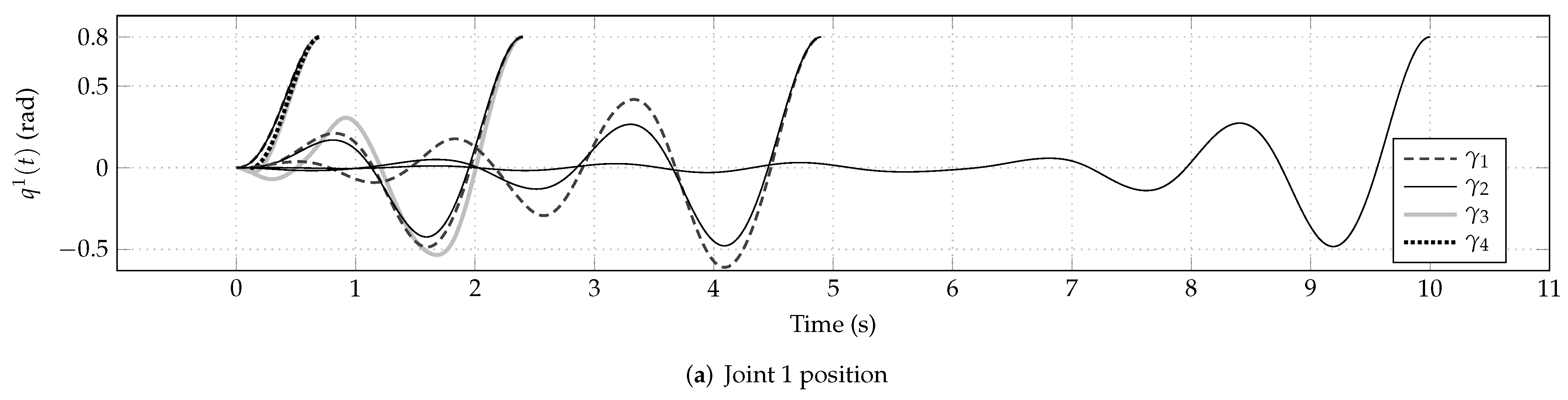
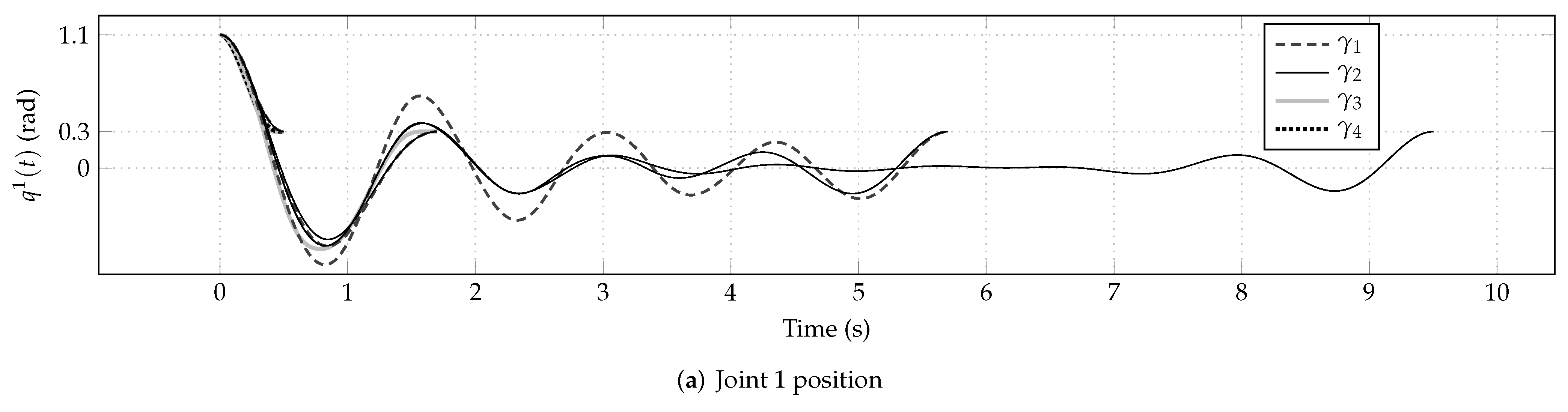
6.2.1. Increased Numerical Stability over Growing Values of T
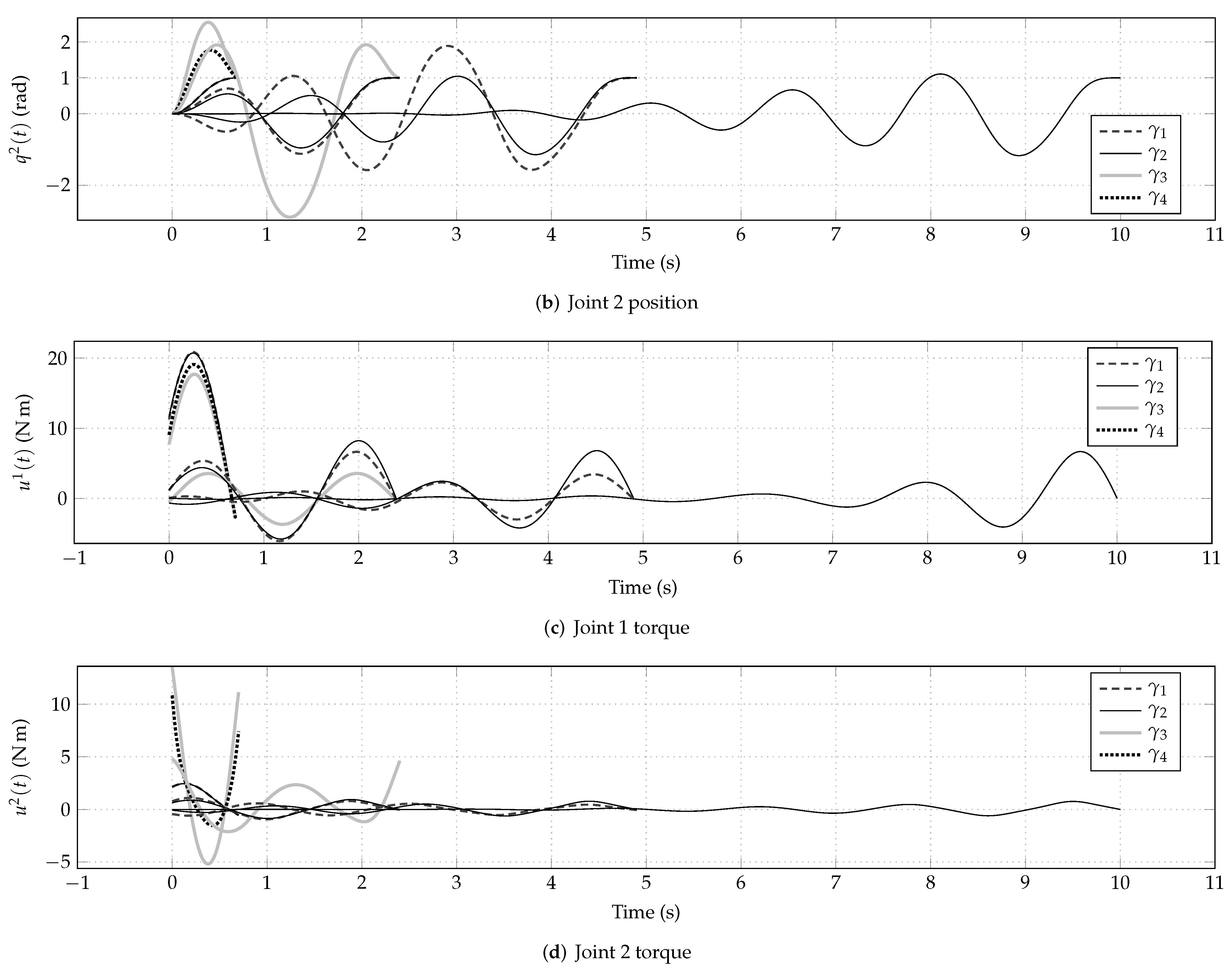
6.2.2. RMS Torque, RMS Power, and CPU Computing Time
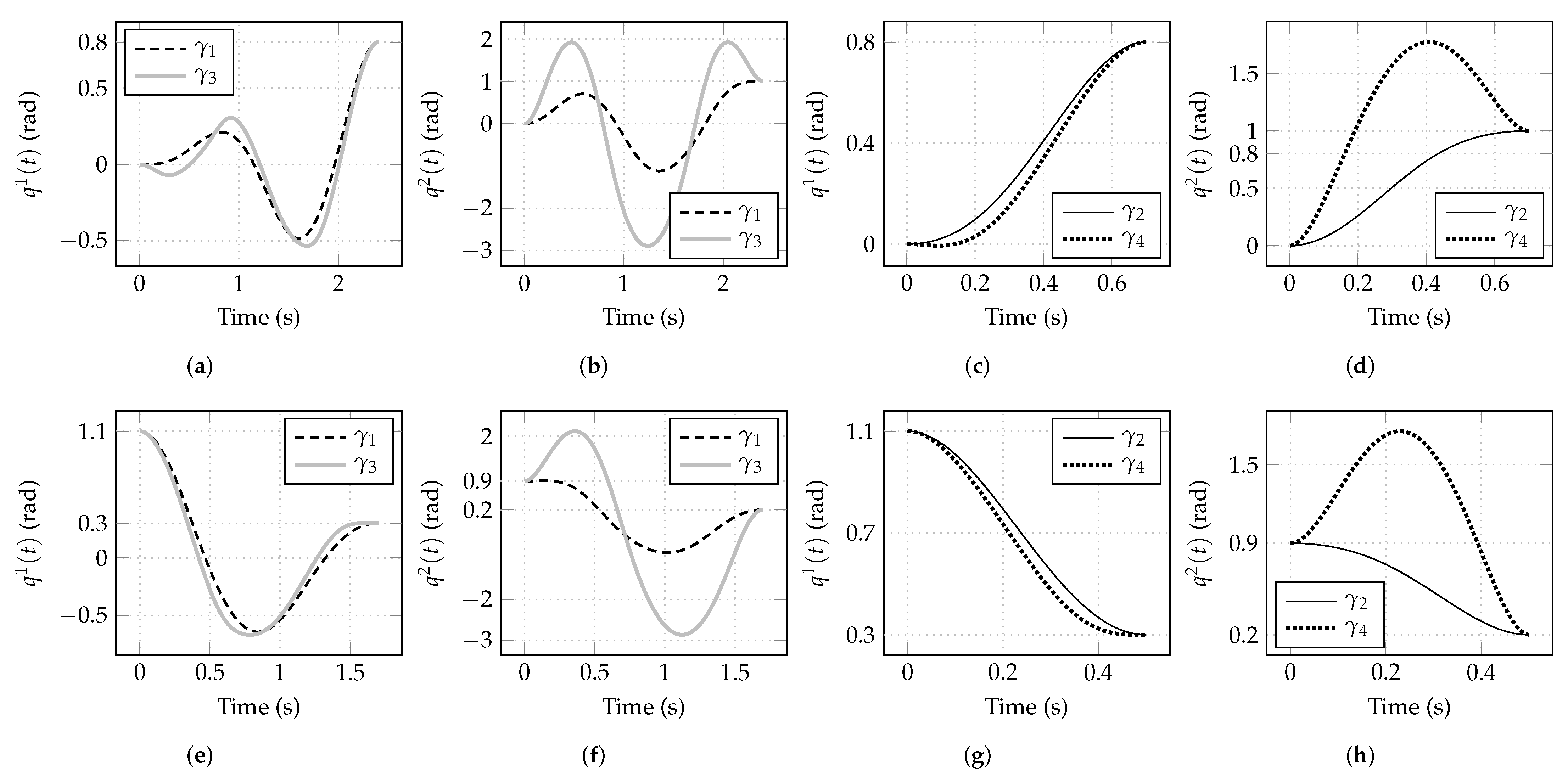
6.2.3. Observed Motion Characteristics
7. Conclusive Remarks
- narrower joint motions (see Figure 5).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CPU | Central Processing Unit |
| DOF | Degrees of Freedom |
| ODE | Ordinary Differential Equations |
| RMS | Root Mean Square |
References
- Benallegue, M.; Laumond, J.P.; Mansard, N. Springer Tracts in Advanced Robotics, Chapter Robot Motion Planning and Control: Is It More Than a Technological Problem? In Geometric and Numerical Foundations of Movements; Springer: Cham, Switzerland, 2017; Volume 117. [Google Scholar] [CrossRef]
- Latombe, J.C. Robot Motion Planning; The Springer International Series in Engineering and Computer Science; Springer: Boston, MA, USA, 1991. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modeling, Planning and Control; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2009. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 4th ed.; Pearson Education Limited: Harlow, UK, 2018. [Google Scholar]
- Spong, M.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Grancharova, A.; Johansen, T.A. Survey of Explicit Approaches to Constrained Optimal Control. In Switching and Learning in Feedback Systems; Murray-Smith, R., Shorten, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 47–97. [Google Scholar] [CrossRef]
- Betts, J.T. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, 2nd ed.; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar] [CrossRef]
- Pontryagin, L.S.; Boltyanskii, V.G.; Gamkrelidze, R.V.; Mishchenko, E.F. The Mathematical Theory of Optimal Processes; Interscience Publishers (Division of John Wiley & Sons, Inc.): New York, NY, USA, 1962. [Google Scholar]
- Mesterton-Gibbons, M. A Primer on the Calculus of Variations and Optimal Control Theory; American Mathematical Society: Providence, RI, USA, 2009; Volume 50. [Google Scholar] [CrossRef]
- Liberzon, D. Calculus of Variations and Optimal Control Theory: A Concise Introduction; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Nikoobin, A.; Moradi, M. Optimal balancing of robot manipulators in point-to-point motion. Robotica 2011, 29, 233–244. [Google Scholar] [CrossRef]
- Boscariol, P.; Richiedei, D. Robust point-to-point trajectory planning for nonlinear underactuated systems: Theory and experimental assessment. Robot. Comput. Integr. Manuf. 2018, 50, 256–265. [Google Scholar] [CrossRef]
- Crain, A.; Ulrich, S. Experimental Validation of Pseudospectral-Based Optimal Trajectory Planning for Free-Floating Robots. J. Guid. Control Dyn. 2019, 42, 1726–1742. [Google Scholar] [CrossRef] [Green Version]
- Putkaradze, V.; Rogers, S. On the Optimal Control of a Rolling Ball Robot Actuated by Internal Point Masses. J. Dyn. Syst. Meas. Control 2020, 142, 051002. [Google Scholar] [CrossRef] [Green Version]
- Vezvari, M.R.; Nikoobin, A.; Ghoddosian, A. Zero-power balancing a two-link robot manipulator for a predefined point-to-point task. J. Mech. Sci. Technol. 2020, 34, 2585–2595. [Google Scholar] [CrossRef]
- Sciavicco, L.; Siciliano, B. Modelling and Control of Robot Manipulators, 2nd ed.; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2000. [Google Scholar] [CrossRef]
- Pan, H.; Xin, M. Nonlinear robust and optimal control of robot manipulators. Nonlinear Dyn. 2014, 76, 237–254. [Google Scholar] [CrossRef]
- Ott, C.; Eiberger, O.; Friedl, W.; Bauml, B.; Hillenbrand, U.; Borst, C.; Albu-Schaffer, A.; Brunner, B.; Hirschmuller, H.; Kielhofer, S.; et al. A Humanoid Two-Arm System for Dexterous Manipulation. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 276–283. [Google Scholar] [CrossRef]
- Busch, B.; Cotugno, G.; Khoramshahi, M.; Skaltsas, G.; Turchi, D.; Urbano, L.; Wächter, M.; Zhou, Y.; Asfour, T.; Deacon, G.; et al. Evaluation of an Industrial Robotic Assistant in an Ecological Environment. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Spong, M. Remarks on robot dynamics: Canonical transformations and Riemannian geometry. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; Volume 1, pp. 554–559. [Google Scholar] [CrossRef]
- Park, F.; Bobrow, J.; Ploen, S. A Lie Group Formulation of Robot Dynamics. Int. J. Robot. Res. 1995, 14, 609–618. [Google Scholar] [CrossRef]
- Stokes, A.; Brockett, R. Dynamics of Kinematic Chains. Int. J. Robot. Res. 1996, 15, 393–405. [Google Scholar] [CrossRef]
- Park, F.; Choi, J.; Ploen, S. Symbolic formulation of closed chain dynamics in independent coordinates. Mech. Mach. Theory 1999, 34, 731–751. [Google Scholar] [CrossRef]
- Žefran, M.; Bullo, F. Robotics and Automation Handbook; Chapter Lagrangian Dynamics; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Gu, Y.L. Modeling and simplification for dynamic systems with testing procedures and metric decomposition. In Proceedings of the Conference Proceedings 1991 IEEE International Conference on Systems, Man, and Cybernetics, Charlottesville, VA, USA, 13–16 October 1991; Volume 1, pp. 487–492. [Google Scholar] [CrossRef]
- Bennequin, D.; Berthoz, A. Springer Tracts in Advanced Robotics, Chapter Several Geometries for Movements Generations. In Geometric and Numerical Foundations of Movements; Springer: Cham, Switzerland, 2017; Volume 117. [Google Scholar] [CrossRef]
- Athans, M.; Falb, P.L. Optimal Control: An Introduction to the Theory and Its Applications; Dover Books on Engineering; Dover Publications: New York, NY, USA, 2006. [Google Scholar]
- Lovelock, D.; Rund, H. Tensors, Differential Forms, and Variational Principles; Dover Books on Mathematics; Dover Publications: New York, NY, USA, 1989. [Google Scholar]
- Grinfeld, P. Introduction to Tensor Analysis and the Calculus of Moving Surfaces; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Goldstein, H.; Poole, C.; Safko, J. Classical Mechanics; Addison-Wesley Series in Physics; Addison Wesley: New York, NY, USA, 2002. [Google Scholar]
- Dubois, F.; Fortuné, D.; Rojas Quintero, J.A.; Vallée, C. Pontryagin Calculus in Riemannian Geometry. In Geometric Science of Information; Nielsen, F., Barbaresco, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 541–549. [Google Scholar] [CrossRef]
- Rojas-Quintero, J.A.; Rojas-Estrada, J.A.; Villalobos-Chin, J.; Santibañez, V.; Bugarin, E. Optimal controller applied to robotic systems using covariant control equations. Int. J. Control 2021, 1–14. [Google Scholar] [CrossRef]
- Rojas-Quintero, J.A. Contribution à la Manipulation Dextre Dynamique Pour les Aspects Conceptuels et de Commande en Ligne Optimale [French]. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2013. [Google Scholar]
- Almuslimani, I.; Vilmart, G. Explicit Stabilized Integrators for Stiff Optimal Control Problems. SIAM J. Sci. Comput. 2021, 43, A721–A743. [Google Scholar] [CrossRef]
- Rojas-Quintero, J.A.; Villalobos-Chin, J.; Santibanez, V. Optimal Control of Robotic Systems Using Finite Elements for Time Integration of Covariant Control Equations. IEEE Access 2021, 9, 104980–105001. [Google Scholar] [CrossRef]
- Reyes Cortés, F.; Kelly, R. Experimental evaluation of model-based controllers on a direct-drive robot arm. Mechatronics 2001, 11, 267–282. [Google Scholar] [CrossRef]
- Berret, B.; Chiovetto, E.; Nori, F.; Pozzo, T. Evidence for composite cost functions in arm movement planning: An inverse optimal control approach. PLoS Comput. Biol. 2011, 7, e1002183. [Google Scholar] [CrossRef] [PubMed]
- Kaphle, M.; Eriksson, A. Optimality in forward dynamics simulations. J. Biomech. 2008, 41, 1213–1221. [Google Scholar] [CrossRef] [PubMed]
- Martin, B.J.; Bobrow, J.E. Minimum-Effort Motions for Open-Chain Manipulators with Task-Dependent End-Effector Constraints. Int. J. Robot. Res. 1999, 18, 213–224. [Google Scholar] [CrossRef]
- Eriksson, A. Temporal finite elements for target control dynamics of mechanisms. Comput. Struct. 2007, 85, 1399–1408. [Google Scholar] [CrossRef]
- Kelly, M. An Introduction to Trajectory Optimization: How to Do Your Own Direct Collocation. SIAM Rev. 2017, 59, 849–904. [Google Scholar] [CrossRef]
- Eriksson, A.; Nordmark, A. Temporal finite element formulation of optimal control in mechanisms. Comput. Methods Appl. Mech. Eng. 2010, 199, 1783–1792. [Google Scholar] [CrossRef]
- Morales-López, S.; Rojas-Quintero, J.A.; Ramírez-de Ávila, H.C.; Bugarin, E. Evaluation of invariant cost functions for the optimal control of robotic manipulators. In Proceedings of the 2021 9th International Conference on Systems and Control (ICSC), Caen, France, 24–26 November 2021; pp. 350–355. [Google Scholar] [CrossRef]
- Ramírez-de Ávila, H.C.; Rojas-Quintero, J.A.; Morales-López, S.; Bugarin, E. Comparing cost functions for the optimal control of robotic manipulators using Pontryagin’s Maximum Principle. In Proceedings of the 2021 XXIII Robotics Mexican Congress (ComRob), Tijuana, Mexico, 27–29 October 2021; pp. 106–111. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Running Cost Function | Criterion | Maximum T Value for Upward Motion | Maximum T Value for Downward Motion |
|---|---|---|---|
| Torque | |||
| Torque & velocity | |||
| Torque | |||
| Torque & velocity |
| Motion | Upward | Upward | Downward | Downward | ||||
|---|---|---|---|---|---|---|---|---|
| Ratio | (Torque) | (Torque and Velocity) | (Torque) | (Torque and Velocity) | ||||
| Processor | i7-8550U | i9-9880H | i7-8550U | i9-9880H | i7-8550U | i9-9880H | i7-8550U | i9-9880H |
| Base Value | 4 | 5 | 60 | 55 | 18 | 29 | 56 | 57 |
| Average | 51 | 73 | 205 | 138 | 99 | 85 | 142 | 146 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Quintero, J.A.; Dubois, F.; Ramírez-de-Ávila, H.C. Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators. Mathematics 2022, 10, 1117. https://doi.org/10.3390/math10071117
Rojas-Quintero JA, Dubois F, Ramírez-de-Ávila HC. Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators. Mathematics. 2022; 10(7):1117. https://doi.org/10.3390/math10071117
Chicago/Turabian StyleRojas-Quintero, Juan Antonio, François Dubois, and Hedy César Ramírez-de-Ávila. 2022. "Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators" Mathematics 10, no. 7: 1117. https://doi.org/10.3390/math10071117
APA StyleRojas-Quintero, J. A., Dubois, F., & Ramírez-de-Ávila, H. C. (2022). Riemannian Formulation of Pontryagin’s Maximum Principle for the Optimal Control of Robotic Manipulators. Mathematics, 10(7), 1117. https://doi.org/10.3390/math10071117