
A General Framework for Flight Maneuvers Automatic Recognition


Abstract
:1. Introduction
2. Sequence Segmentation
2.1. The Trend Fragmentation Algorithm
| Algorithm 1 The Trend Fragmentation Algorithm. |
|
| . |
2.2. The Clustering Algorithm
| Algorithm 2 TS-ISODATA Algorithm. |
| , trend sequence O; |
|
| Output: Clustering results |
3. Flight Maneuver Recognition
3.1. Phase Space Reconstruction
3.1.1. Reconstruction Parameters
- Define the correlation integral corresponding to each point y of the embedded time series in the reconstructed phase space as in Equation (4).where is the reconstructed phase space vector, is the number of vectors , m is the embedding dimension, N is the number of points of the original time series, t is time, and is the associative integral, a cumulative distribution function that expresses the probability that the distance between any two points in the phase space is less than the radius r. Here, the distance between points is expressed as an infinite number of parameters of the difference of vectors.
- Split the given time series into t equationual and disjoint subsequences as Equation (6), where t is the reconstruction time delay.
- Calculate the original sequence’s and each sequence’s :
- Select the two radiuses r with the max and min values and define the increments :
- Calculate the statistics:
- Take the value corresponding to the first zero point of or the first minimal value of as the optimal time delay .
- Let the t corresponding to the global minimum of be the length of the time series window and the embedding dimension m.
3.1.2. Fusion Phase
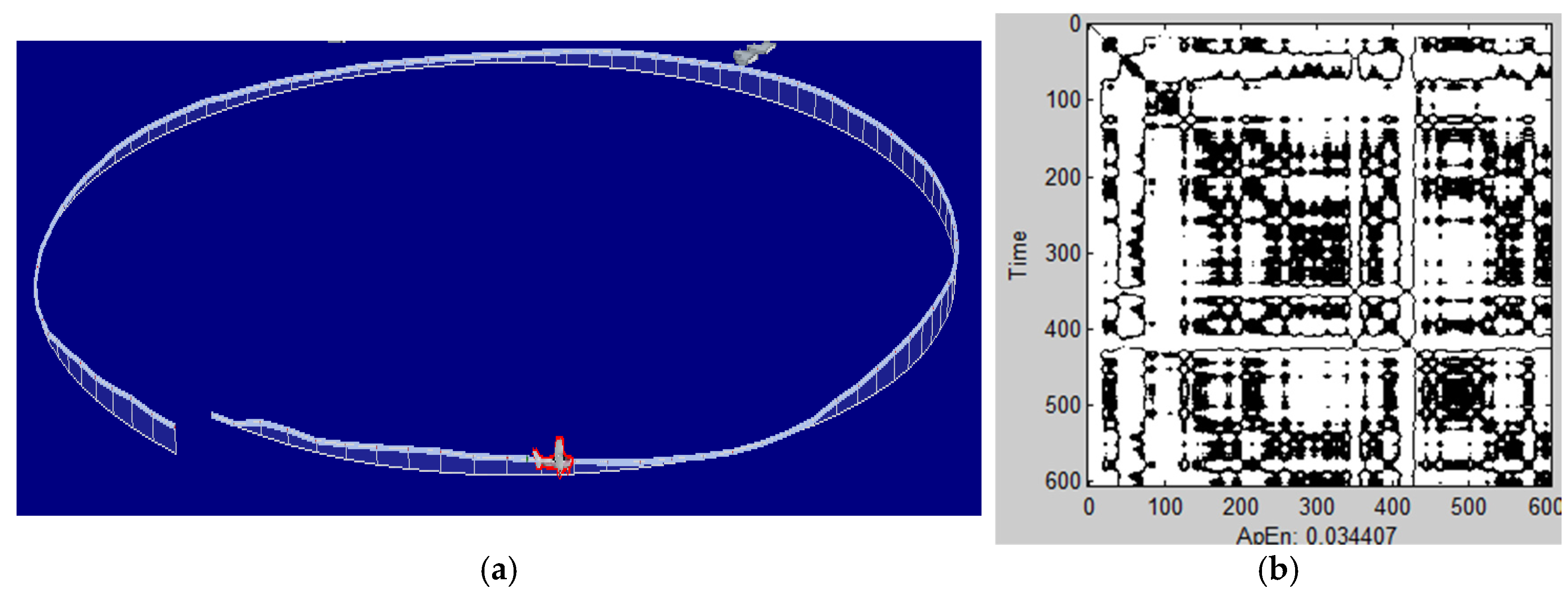
3.2. Recursion Graphs and Approximate Entropy
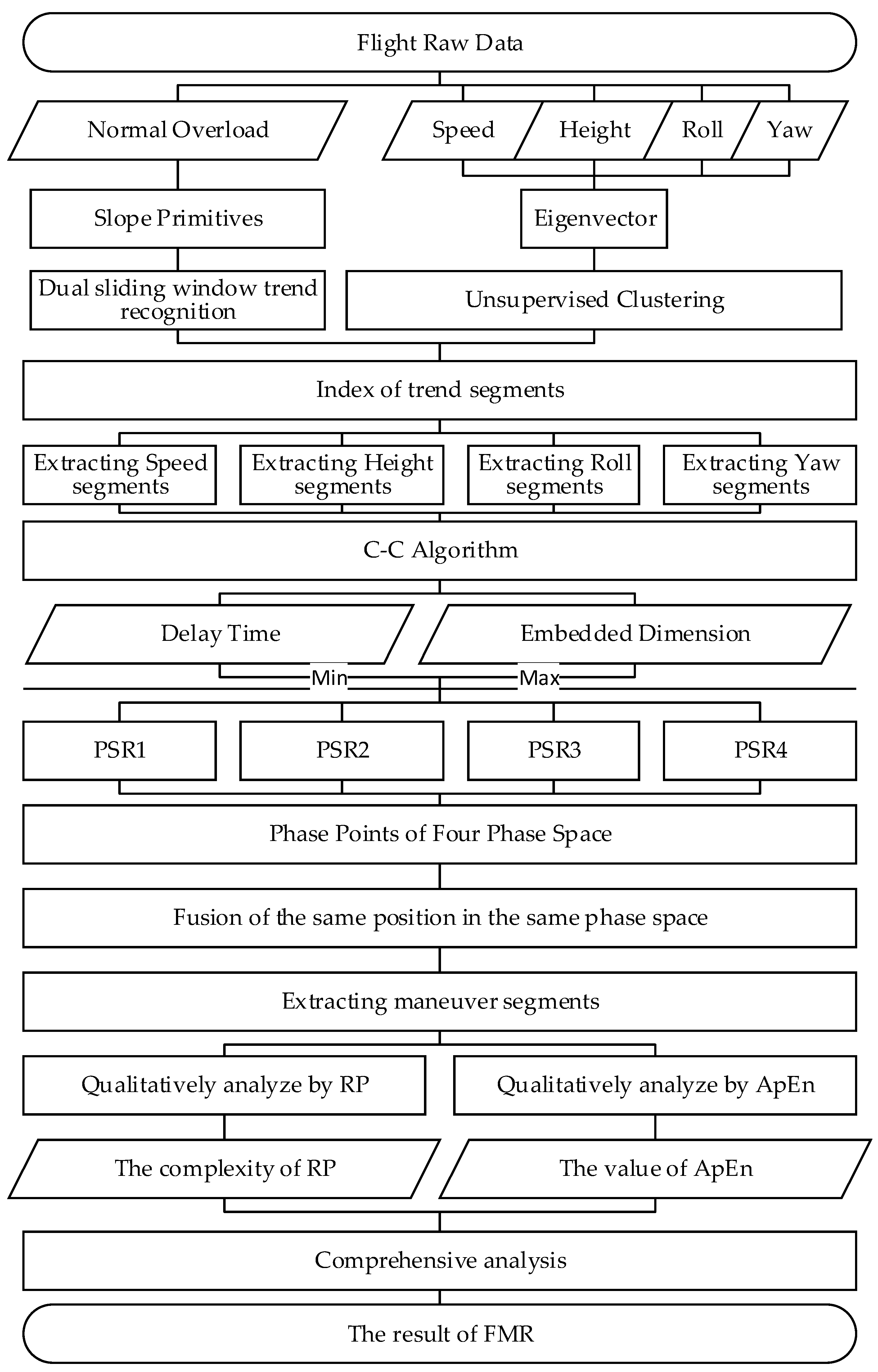
4. The FMR General Framework
5. Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- The United States Department of Transportation; Federal Aviation Administration; Airman Testing Standards Branch. Pilot’s Handbook of Aeronautical Knowledge; The United States Department of Transportation: Oklahoma City, AK, USA, 2016.
- Burgin, G.H.; Owens, A.J. An Adaptive Maneuvering Logic Computer Program for the Simulation of One-to-One Air-to-Air Combat. NASA Contractor Report (CR), Volume 2: Program Description; NASA: San Diego, CA, USA, 1975. [Google Scholar]
- Burgin, G.H. Improvements to the Adaptive Maneuvering Logic Program. 1986. Available online: https://ntrs.nasa.gov/404?original=%2Fcitations%2F19880002266 (accessed on 2 March 2022).
- Barndt, G.; Sarkar, S.; Miller, C. Maneuver regime recognition development and verification for H-60 structural monitoring. In Proceedings of the Annual Forum Proceedings-American Helicopter Society, Virginia Beach, VA, USA, 1–3 May 2007; American Helicopter Society, Inc.: Fairfax, VA, USA, 2007; Volume 63, p. 317. [Google Scholar]
- Zhang, J.Y. Time Series Analysis Method of Flight Data and Its Application; National Defense Industry Press: Beijing, China, 2013. [Google Scholar]
- Li, Z.-X.; Zhang, F.-M.; Li, K.-W. A multivariate time series indexing structure supporting DTW distance. J. Softw. 2014, 25, 560–575. [Google Scholar]
- Li, H.; Shan, Z.; Guo, H. MDTW-based flight action recognition algorithm. Comput. Eng. Appl. 2015, 51, 267–270. [Google Scholar]
- Shen, Y.; Ni, S.; Zhang, P. A similar subsequence query method for flight data. J. Air Force Eng. Univ. 2019, 20, 7–12. [Google Scholar]
- Tang, C.; Dong, J. LSH-based time subsequence query algorithm. J. Comput. Sci. 2012, 35, 2228–2236. [Google Scholar]
- Qu, J.; Lv, M.; Yang, Y. Flight Motion Recognition Method Based on Multivariate Phase Space Reconstruction and Approximate Entropy. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 7247–7253. [Google Scholar]
- Mao, H.; Zhang, F.; Feng, H. Research on flight maneuver evaluation method based on singular value decomposition. Comput. Eng. Appl. 2008, 44, 240–242. [Google Scholar]
- Mao, H.; Zhang, F.; Feng, H. Similar pattern query for multivariate flight data. Comput. Eng. Appl. 2011, 47, 151–155. [Google Scholar]
- Yang, J.; Duan, C.; Xie, S. Fuzzy least squares support vector machine based aircraft flight maneuver recognition. J. Ballist. Arrow Guid. 2004, S6, 395–398. [Google Scholar]
- Jia, Z.; Fan, X.; Xue, M. Online identification method for tactical maneuvers of enemy aircraft based on maneuver elements. J. Beijing Univ. Technol. 2018, 38, 820–827. [Google Scholar]
- Kendrick, J.D.; Maybeck, P.S.; Reid, J.G. Estimation of aircraft target motion using orientation measurements. IEEE Trans. Aerosp. Electron. Syst. 1981, 2, 254–260. [Google Scholar] [CrossRef]
- Kou, Y.; Jiang, L.; Wang, D. High-order reconstruction of the decision process of close air com-bat maneuver. J. Syst. Simul. 2019, 31, 2085. [Google Scholar]
- Molkenthin, J. Determination and Verification of Operational Maneuver Parameters and Time Histories. Loads Requir. Mil. Aircr. 1997, 6, 3–11. [Google Scholar]
- Wang, Y.; Dong, J.; Liu, X. Identification and standardization of maneuvers based upon operational flight data. Chin. J. Aeronaut. 2015, 28, 133–140. [Google Scholar] [CrossRef] [Green Version]
- Xie, C.; Ni, S.; Zhang, Z. A knowledge-based method for fast recognition of aerobatic maneuvers. Comput. Eng. 2004, 30, 116–118. [Google Scholar]
- Ni, S.; Shi, Z.; Xie, C. Establishment of a knowledge base for maneuvering flight maneuvers recognition of military warplanes. Comput. Simul. 2005, 22, 23–26. [Google Scholar] [CrossRef]
- Travert, J.H. Flight Regime and Maneuver Recognition for Complex Maneuvers. Master’s Thesis, Embry-Riddle Aeronautical University, Daytona Beach, FL, USA, 2009. [Google Scholar]
- Chunmei, G.; Lili, Z.; Yu, B. Recognition of Flight Operation Action Based on Expert System Inference Engine. In Proceedings of the 2019 11th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 24–25 August 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 17–20. [Google Scholar]
- Tian, H.; Xie, S.; Wang, L. Flight trajectory identification based on rough set theory. Firepower Command Control 2015, 40, 29–33. [Google Scholar]
- Zhou, D.Y.; Li, F. Genetic algorithm-based tactical flight maneuver decision for aircraft. J. Northwest. Polytech. Univ. 2002, 20, 109–112. [Google Scholar]
- Wei, Z.; Ding, D.; Zhou, H. A flight maneuver recognition method based on multi-strategy affine canonical time warping. Appl. Soft Comput. 2020, 95, 106527. [Google Scholar] [CrossRef]
- Wang, L.; Huang, C.Q.; Wei, Z.L. Automatic extraction of flight action rules based on SSA algorithm. Comput. Eng. Appl. 2019, 14, 203–208. [Google Scholar]
- Wang, Y.W.; Gao, Y. A flight action recognition rule extraction method based on whale optimization algorithm. J. Nav. Aviat. Eng. Coll. 2019, 33, 447–451. [Google Scholar]
- He, D.; Wu, S.; Bechhoefer, E. Development of Regime Recognition Tools for Usage Monitoring. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–11. [Google Scholar]
- He, D.; Wu, S.; Bechhoefer, E. A Regime Recognition Algorithm for Helicopter Usage Monitoring. Aerosp. Technol. Adv. 2010, 391–404. Available online: https://books.google.co.jp/books?hl=en&lr=&id=bQWQDwAAQBAJ&oi=fnd&pg=PA391&dq=A+regime+recognition+algorithm+for+helicopter+usage+monitoring.+&ots=4Kgn_R61wO&sig=I6atHzxhI1AC8YqD9Tw1cNbI_ZQ&redir_esc=y#v=onepage&q=A%20regime%20recognition%20algorithm%20for%20helicopter%20usage%20monitoring.&f=false (accessed on 2 March 2022).
- Rajnicek, R.E. Application of Kalman Filtering to Real-Time Flight Regime Recognition Algorithms in a Helicopter Health and Usage Monitoring System. Master’s Thesis, Embry-Riddle Aeronautical University, Daytona Beach, FL, USA, 2008. [Google Scholar]
- Meng, G.-L.; Zhang, H.-M.; Park, H.-Y. Maneuver recognition of warplanes in automated flight training evaluation. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 1267–1274. [Google Scholar]
- Li, Y.F.; Ni, S.H.; Zhang, Z.L. A fuzzy Kohonen network-based intelligent processing method for flight data. Syst. Eng. Electron. Technol. 2002, 24, 53–55. [Google Scholar]
- Xu, W. A fuzzy neural network-based approach for shipboard aircraft landing maneuvers recognition. Appl. Sci. Technol. 2013, 2, 26–29. [Google Scholar]
- Hanyang, F.; Hongming, F.; Ruiyuan, G. Research on air target maneuver recognition based on LSTM network. In Proceedings of the 2020 International Workshop on Electronic Communication and Artificial Intelligence (IWECAI), Shanghai, China, 12–14 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 6–10. [Google Scholar]
- Fang, W.; Wang, Y.; Yan, W.J.; Gong, Y. Flight action recognition based on differential ideas and convolutional neural net-works. J. Chin. Acad. Electron. Sci. 2021, 16, 347–353. [Google Scholar]
- Fang, W.; Wang, Y.; Yan, W.; Lin, C. Symbolic flight action recognition based on neural networks. Syst. Eng. Electron. 2021, 1, 13. [Google Scholar]
- Zhang, Y.Y.; Wang, Y.Y.; Wang, C.H.X. Analysis of parametric correlation and temporal features for flight action recognition method. Comput. Eng. Appl. 2016, 52, 246–249. [Google Scholar]
- Shen, Y.; Ni, S.; Zhang, P. A Bayesian network-based approach for flight action recognition. Comput. Eng. Appl. 2017, 53, 161–167. [Google Scholar]
- Zhang, X.; Yin, Z.; Liu, F.; Huang, Q. Data mining method for aircraft maneuvering division. J. Northwest. Polytech. Univ. 2016, 34, 33–40. [Google Scholar]
- Zhang, L. A non-supervised automatic method of aircraft maneuver partition. J. Comput. Methods Sci. Eng. 2021, 21, 383–395. [Google Scholar] [CrossRef]
- Kang, Z.; Shang, J.; Feng, Y. A deep sequence-to-sequence method for accurate long landing prediction based on flight data. IET Intell. Transp. Syst. 2021, 15, 1028–1042. [Google Scholar] [CrossRef]
- Li, X.; Shang, J.; Zheng, L. CurveCluster+: Curve Clustering for Hard Landing Pattern Recognition and Risk Evalua-tion Based on Flight Data. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Tou, J.T.; Gonzalez, R.C. Pattern Recognition Principles; Addison-Wesley Publishing Company: Reading, MA, USA, 1974. [Google Scholar]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Corresponding Maneuver Segments |
|---|---|
| 1 | 8,9,16,18,23,24,31,34,35,42,45,48,52,55,60,63,67,74,77,82,19,28,37,40,49,58,69,79 |
| 2 | 1,87,92,94 |
| 3 | 3,5,12,14,15,20,27,33,36,39,41,51,54,57,62,81,84,88,95,96,11,25,38,43,65,68,71,72, |
| 4 | 4,6,22,53,50,66,73,89,91,2,7,10,13,17,21,26,29,30,44,47,32,46,56,59,61,64,70,75,83,85,76,78,80,86,90,93 |
| Categories | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.3937 | 0.3148 | 0.4985 | 0.3512 | 0.2881 | 0.4112 | 0.3309 | 0.2490 | 0.3989 | 0.4117 | 0.3648 |
| 2 | 0.3166 | 0.3594 | 0.4252 | 0.0870 | 0.2491 | 0.0408 | 0.0870 | 0.0741 | 0.1295 | 0.1922 | 0.1961 |
| 3 | 0.1346 | 0.0941 | 0.2007 | 0.1178 | 0.0953 | 0.1457 | 0.1178 | 0.0953 | 0.1419 | 0.0344 | 0.1177 |
| Categories | File 1 + File 2 C172, 5730 Lines | File 3 SR20, 13,750 Lines | File 4 DA32, 13,018 Lines | Average | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Number | FMR | Expert | Accuracy (%) | FMR | Expert | Accuracy (%) | FMR | Expert | Accuracy (%) | Accuracy |
| 1 | 28 | 26 | 92.3 | 6 | 5 | 80 | 49 | 50 | 98.2 | 90.2 |
| 2 | 4 | 4 | 100 | 20 | 24 | 83.3 | 7 | 5 | 60 | 81.1 |
| 3 | 28 | 26 | 92.3 | 10 | 8 | 75 | 15 | 17 | 88.2 | 85.2 |
| Time (seconds) | Ratio | Ratio | Ratio | Ratio | ||||||
| 285 | 15,675 | 55 | 382 | 17,569 | 45.9 | 349 | 21,638 | 62 | 54.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Chai, H.; Jia, R. A General Framework for Flight Maneuvers Automatic Recognition. Mathematics 2022, 10, 1196. https://doi.org/10.3390/math10071196
Lu J, Chai H, Jia R. A General Framework for Flight Maneuvers Automatic Recognition. Mathematics. 2022; 10(7):1196. https://doi.org/10.3390/math10071196
Chicago/Turabian StyleLu, Jing, Hongjun Chai, and Ruchun Jia. 2022. "A General Framework for Flight Maneuvers Automatic Recognition" Mathematics 10, no. 7: 1196. https://doi.org/10.3390/math10071196
APA StyleLu, J., Chai, H., & Jia, R. (2022). A General Framework for Flight Maneuvers Automatic Recognition. Mathematics, 10(7), 1196. https://doi.org/10.3390/math10071196