
Synthesized Landing Strategy for Quadcopter to Land Precisely on a Vertically Moving Apron





Abstract
:1. Introduction
2. Quadcopter Dynamics and Problem Statement
3. Main Results
3.1. Disturbance Observer-Based Altitude Controller
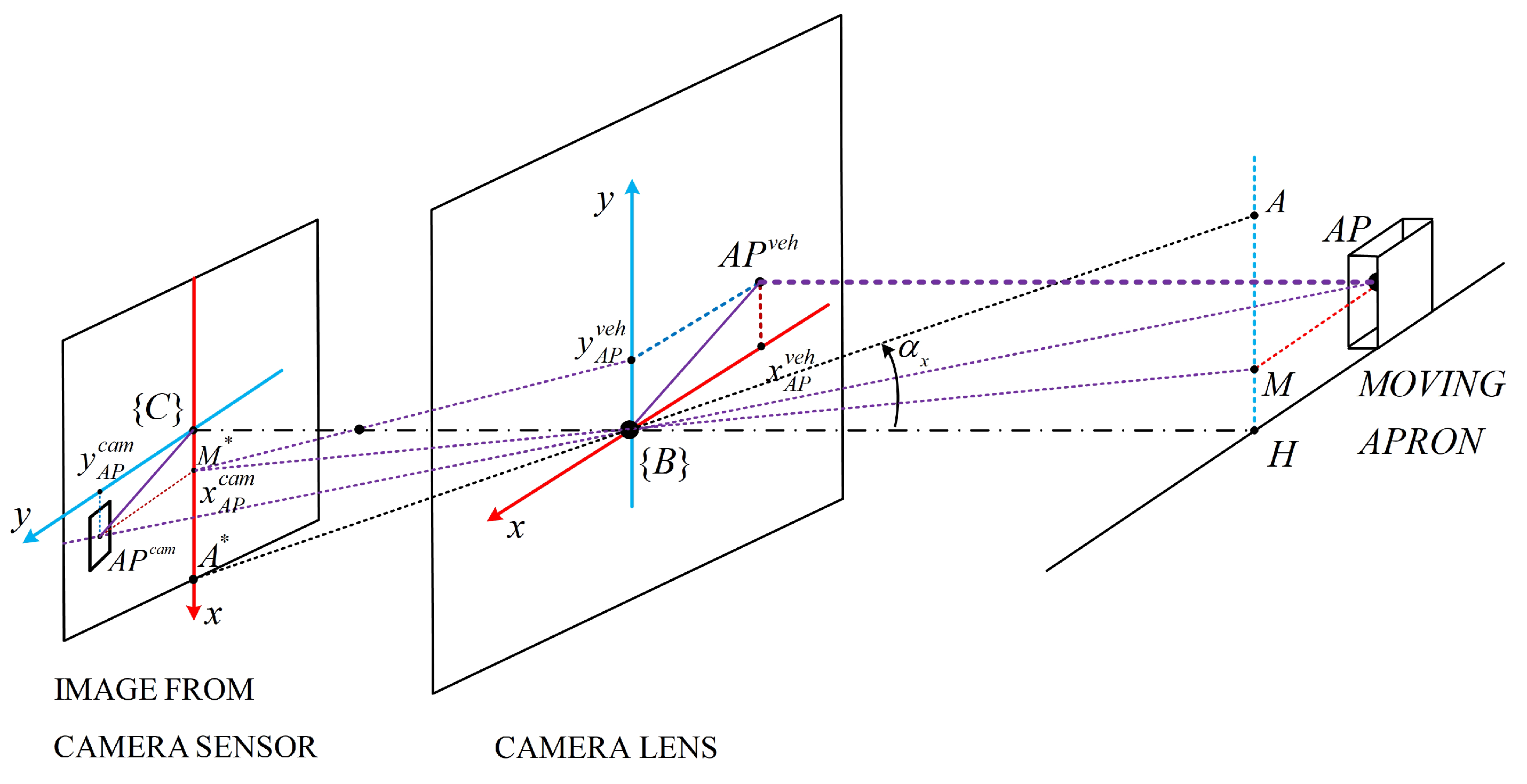
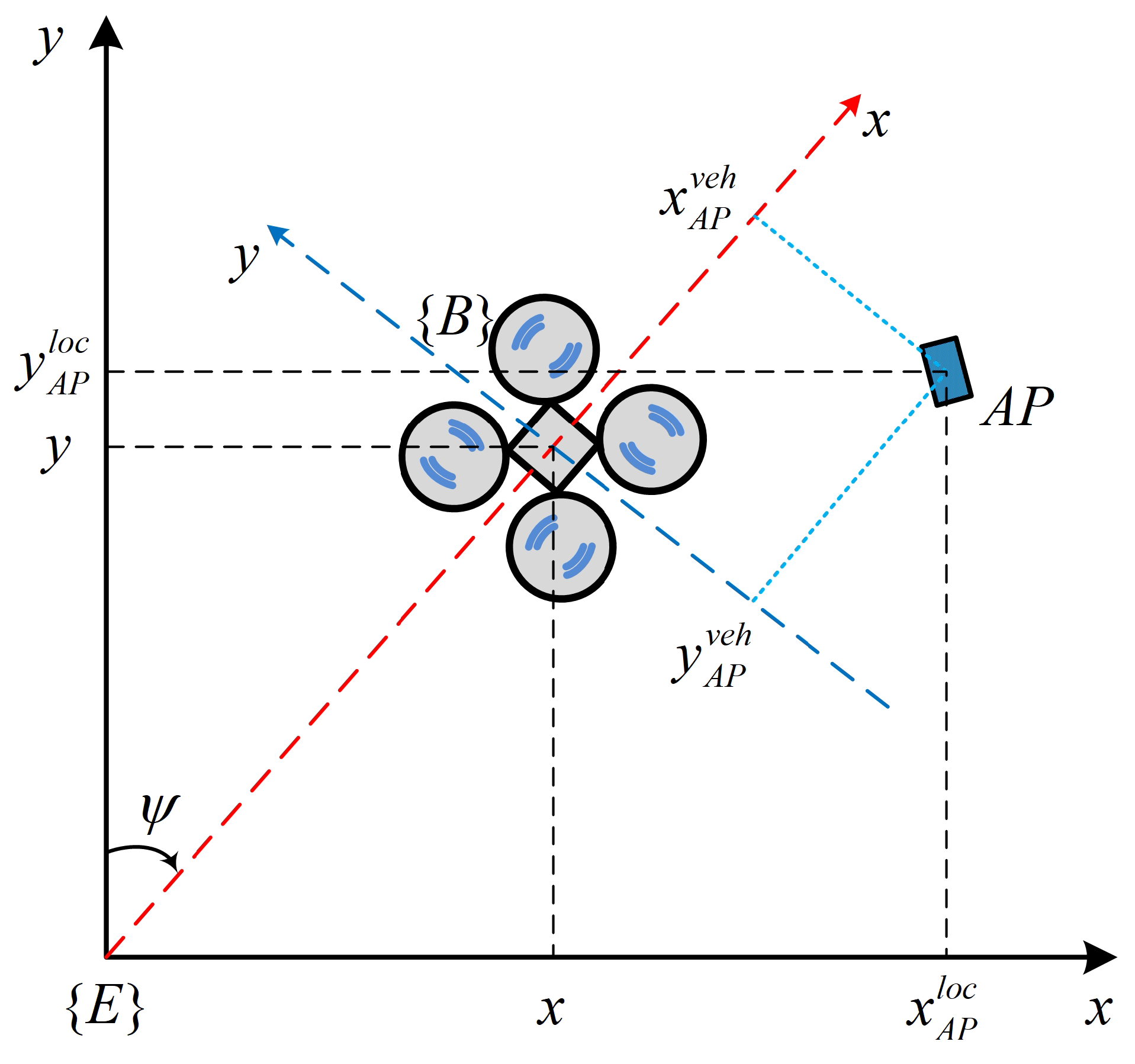
3.2. Apron State Estimator
3.3. Landing Planner
- Step 1: Start.
- Step 2: Horizontally move to the landing area.
- Step 3: If the apron is visible, jump to Step 4. Otherwise, jump to Step 11.
- Step 4: Horizontally approach the apron.
- Step 5: If the quadcopter and the apron are horizontally close, jump to Step 6. Otherwise, jump to Step 4.
- Step 6: Descend over the apron.
- Step 7: If the apron is lost, jump to Step 8. Otherwise, jump to Step 5.
- Step 9: If the quadcopter and the apron are vertically close, jump to Step 10.
- Step 10: Final approach the apron’s surface.
- Step 11: If the quadcopter has used the maximum search attempts, jump to Step 14. Otherwise, jump to Step 12.
- Step 12: Climb to the search altitude.
- Step 13: If the landing target is visible, jump to Step 4. Otherwise, jump to Step 14.
- Step 14: Land at its current position.
- Step 15: If the quadcopter is fully landed, jump to Step 16.
- Step 16: Landing complete.
4. Experiment and Discussions
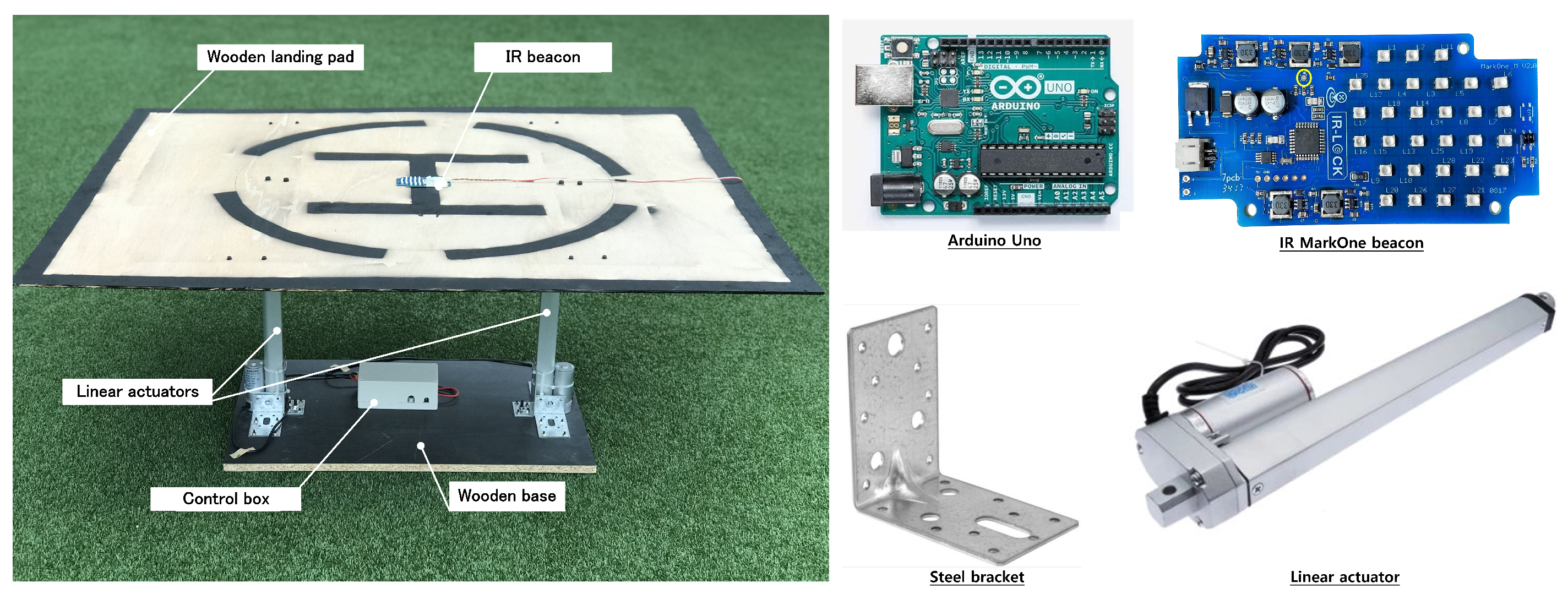
4.1. Experimental Setup
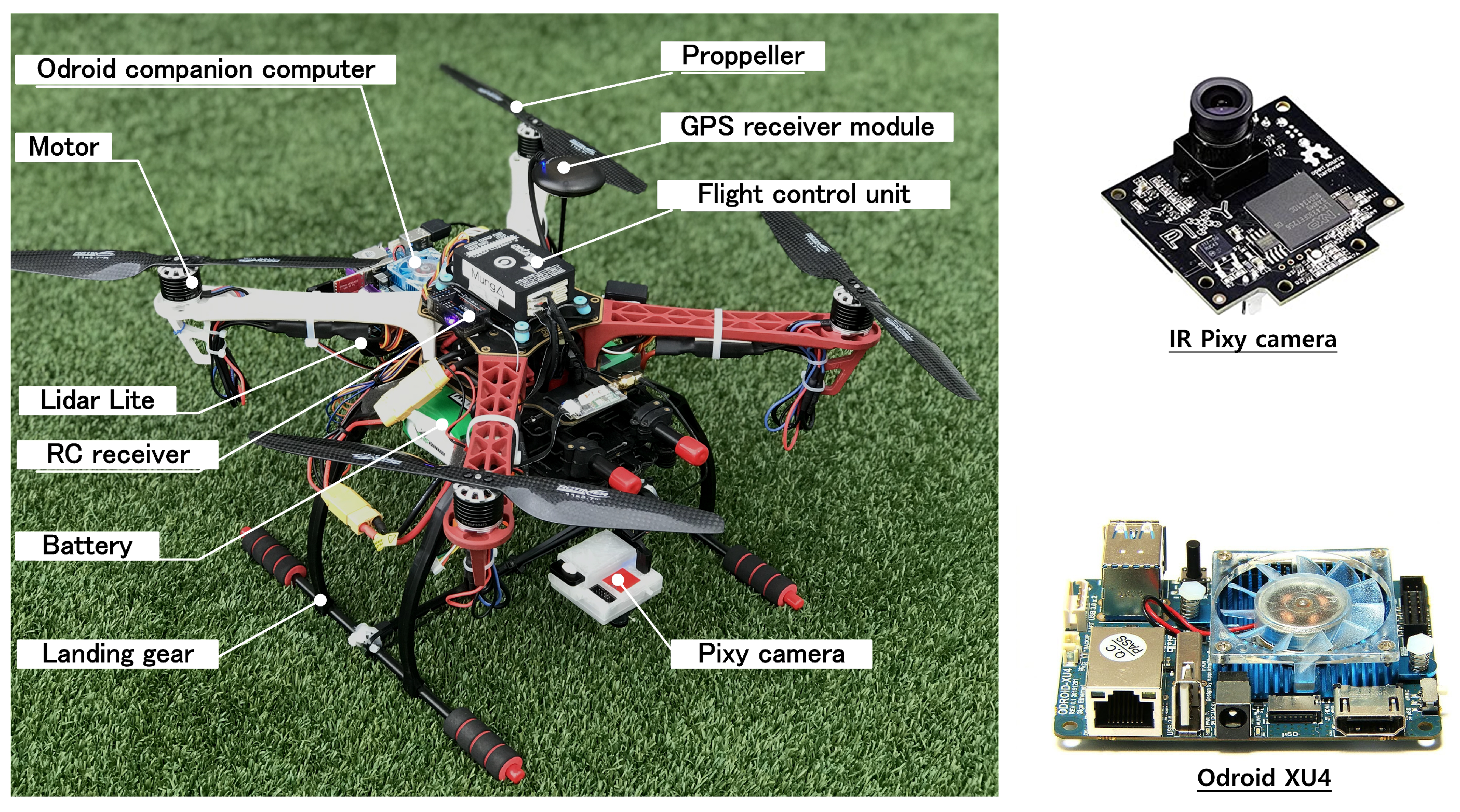
4.1.1. Experimental Quadcopter Platform
4.1.2. Vertical Moving Apron
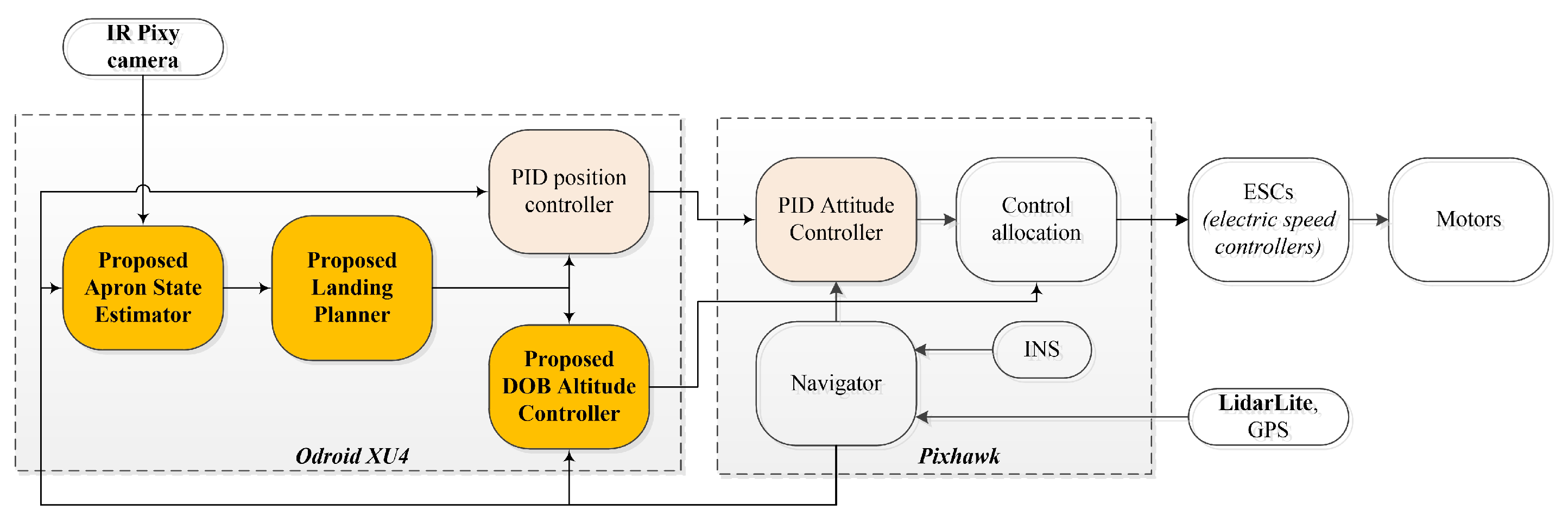
4.1.3. Software
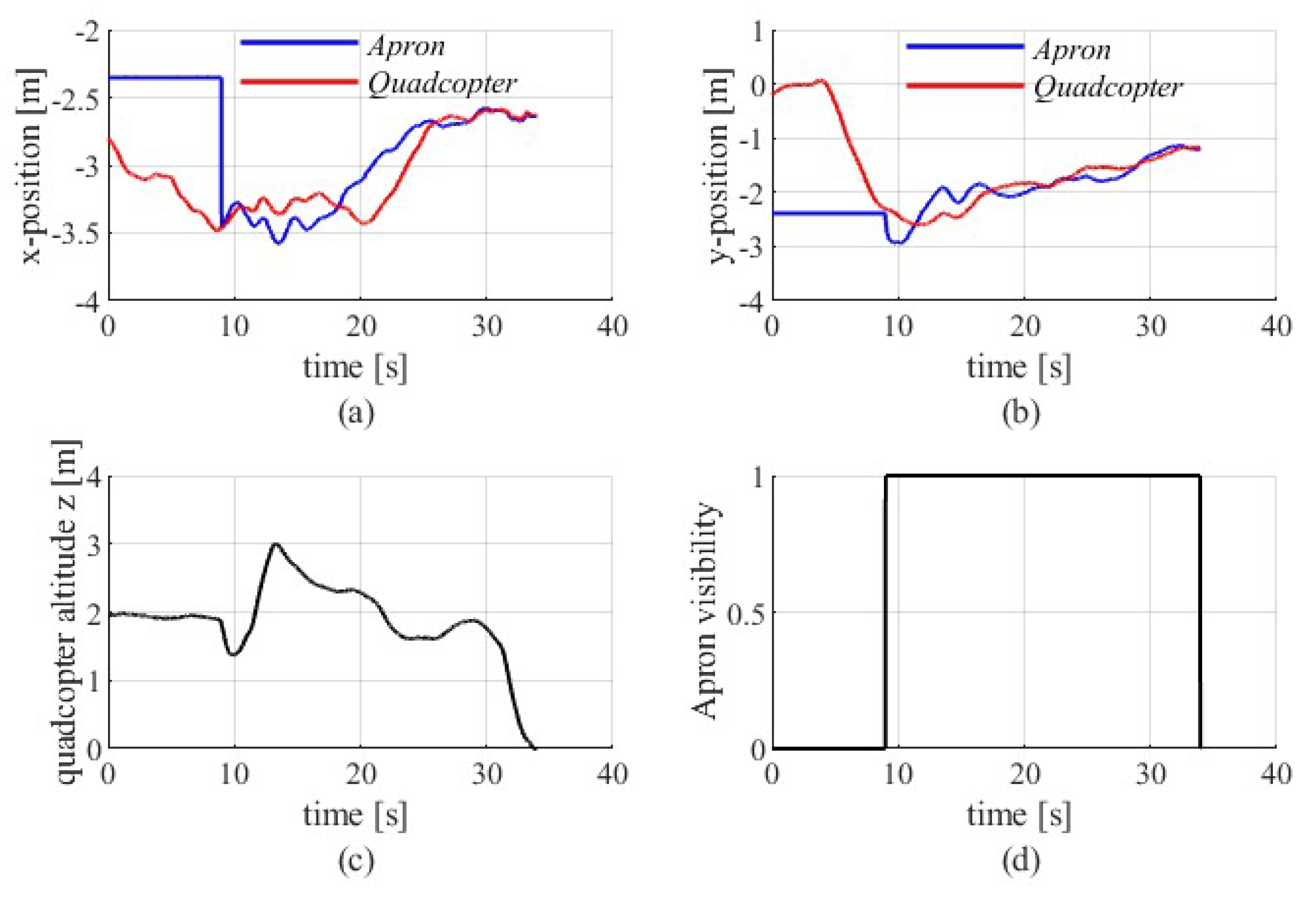
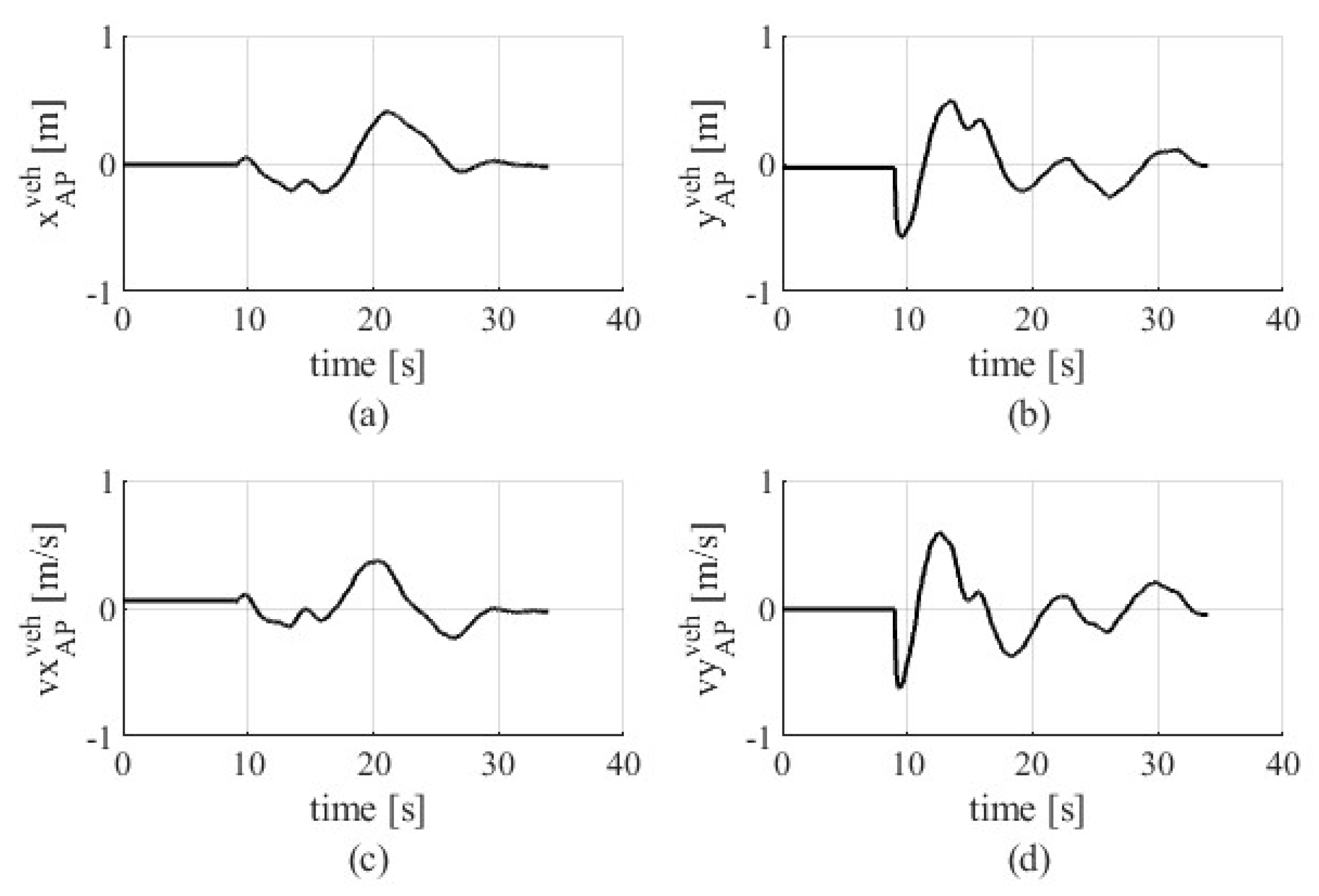
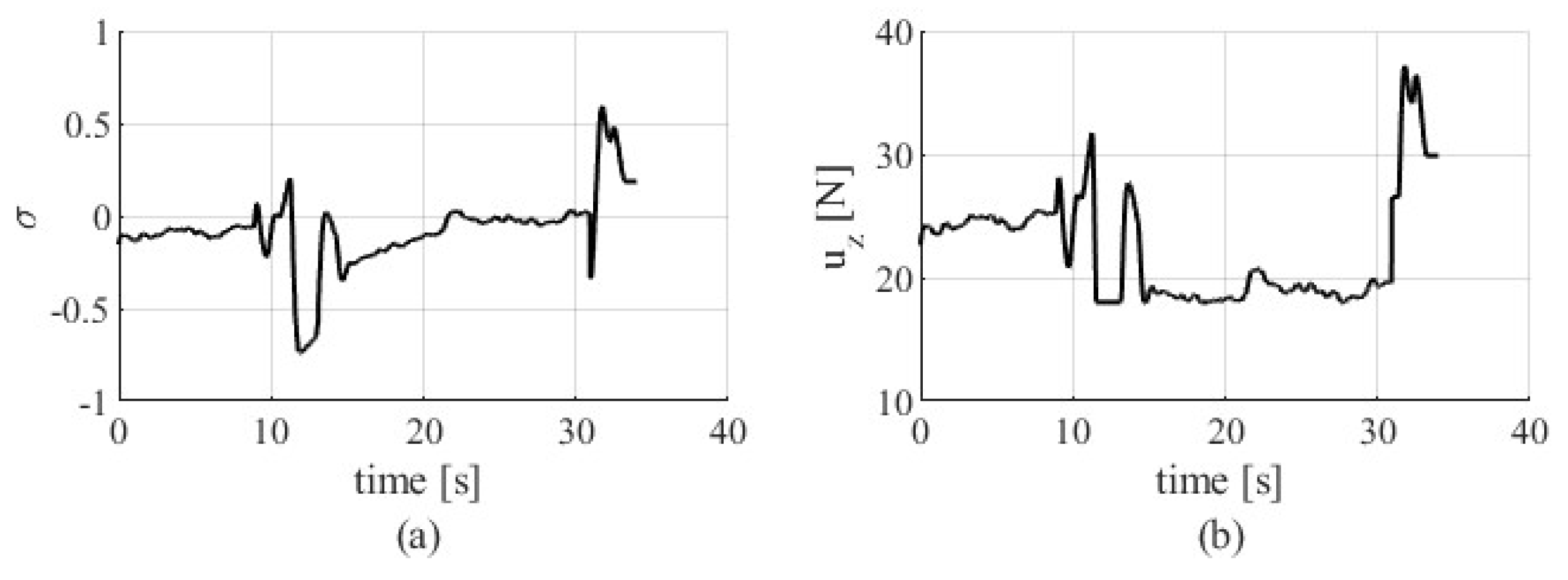
4.2. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- Xuan-Mung, N.; Hong, S.K. Robust backstepping trajectory tracking control of a quadrotor with input saturation via extended state observer. Appl. Sci. 2019, 9, 5184. [Google Scholar] [CrossRef] [Green Version]
- Pounds, P.E.; Bersak, D.R.; Dollar, A.M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control. Auton. Robot. 2012, 33, 129–142. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Xuan-Mung, N.; Hong, S.K. Quadcopter adaptive trajectory tracking control: A new approach via backstepping technique. Appl. Sci. 2019, 9, 3873. [Google Scholar] [CrossRef] [Green Version]
- Ding, S.; Li, S. Second-order sliding mode controller design subject to mismatched term. Automatica 2017, 77, 388–392. [Google Scholar] [CrossRef]
- Wang, H.; Pan, Y.; Li, S.; Yu, H. Robust Sliding Mode Control for Robots Driven by Compliant Actuators. IEEE Trans. Control Syst. Technol. 2019, 27, 1259–1266. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Mung, N.X.; Thanh, H.L.N.N.; Huynh, T.T.; Lam, N.T.; Hong, S.K. Adaptive Sliding Mode Control for Attitude and Altitude System of a Quadcopter UAV via Neural Network. IEEE Access 2021, 9, 40076–40085. [Google Scholar] [CrossRef]
- Ji, R.; Ma, J.; Ge, S.S. Modeling and Control of a Tilting Quadcopter. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2823–2834. [Google Scholar] [CrossRef]
- Chang, X.H.; Liu, Y.; Shen, M. Resilient Control Design for Lateral Motion Regulation of Intelligent Vehicle. IEEE/ASME Trans. Mechatron. 2019, 24, 2488–2497. [Google Scholar] [CrossRef]
- Ho, H.W.; Croon, G.C.D.; Kampen, E.V.; Chu, Q.P.; Mulder, M. Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing. IEEE Trans. Robot. 2018, 34, 508–516. [Google Scholar] [CrossRef]
- Goncalves, V.M.; Mclaughlin, R.; Pereira, G.A. Precise Landing of Autonomous Aerial Vehicles Using Vector Fields. IEEE Robot. Autom. Lett. 2020, 5, 4337–4344. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Naldi, R.; Silvestre, C.; Cunha, R.; Marconi, L. Robust Landing and Sliding Maneuver Hybrid Controller for a Quadrotor Vehicle. IEEE Trans. Control Syst. Technol. 2016, 24, 400–412. [Google Scholar] [CrossRef]
- Dougherty, J.A.; Lee, T. Monocular estimation of ground orientation for autonomous landing of a quadrotor. J. Guid. Control Dyn. 2016, 39, 1407–1416. [Google Scholar] [CrossRef]
- Hu, B.; Lu, L.; Mishra, S. A Control Architecture for Time-Optimal Landing of a Quadrotor Onto a Moving Platform. Asian J. Control 2018, 20, 1701–1712. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M. Autonomous Landing of a Quadrotor on a Moving Platform. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1504–1519. [Google Scholar] [CrossRef]
- Qi, Y.; Jiang, J.; Wu, J.; Wang, J.; Wang, C.; Shan, J. Autonomous landing solution of low-cost quadrotor on a moving platform. Robot. Auton. Syst. 2019, 119, 64–76. [Google Scholar] [CrossRef]
- Tzoumanikas, D.; Li, W.; Grimm, M.; Zhang, K.; Kovac, M.; Leutenegger, S. Fully autonomous micro air vehicle flight and landing on a moving target using visual–inertial estimation and model-predictive control. J. Field Robot. 2019, 36, 49–77. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhang, S.; Tian, J.; Liu, L. An onboard vision-based system for autonomous landing of a low-cost quadrotor on a novel landing pad. Sensors 2019, 19, 4703. [Google Scholar] [CrossRef] [Green Version]
- Araar, O.; Aouf, N.; Vitanov, I. Vision Based Autonomous Landing of Multirotor UAV on Moving Platform. J. Intell. Robot. Syst. Theory Appl. 2017, 85, 369–384. [Google Scholar] [CrossRef]
- Borowczyk, A.; Nguyen, D.T.; Nguyen, A.P.V.; Nguyen, D.Q.; Saussié, D.; Ny, J.L. Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle. Ifac-Papersonline 2017, 50, 10488–10494. [Google Scholar] [CrossRef]
- Tan, C.K.; Wang, J.L.; Paw, Y.C.; Liao, F. Robust linear output feedback controller for autonomous landing of a quadrotor on a ship deck. Int. J. Control 2019, 92, 2791–2805. [Google Scholar] [CrossRef]
- Tan, L.; Wu, J.; Yang, X.; Song, S. Research on optimal landing trajectory planning method between an UAV and a moving vessel. Appl. Sci. 2019, 9, 3708. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zheng, Z.; Sun, L.; Zhu, M. Saturated adaptive sliding mode control for autonomous vessel landing of a quadrotor. IET Control Theory Appl. 2018, 12, 1830–1842. [Google Scholar] [CrossRef]
- Lu, Q.; Ren, B.; Parameswaran, S. Shipboard landing control enabled by an uncertainty and disturbance estimator. J. Guid. Control Dyn. 2018, 41, 1502–1520. [Google Scholar] [CrossRef]
- Tan, C.K.; Wang, J.; Paw, Y.C.; Liao, F. Autonomous ship deck landing of a quadrotor using invariant ellipsoid method. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 891–903. [Google Scholar] [CrossRef]
- Wang, L.; Bai, X. Quadrotor Autonomous Approaching and Landing on a Vessel Deck. J. Intell. Robot. Syst. Theory Appl. 2018, 92, 125–143. [Google Scholar] [CrossRef]
- Lee, J.W.; Xuan-Mung, N.; Nguyen, N.P.; Hong, S.K. Adaptive altitude flight control of quadcopter under ground effect and time-varying load: Theory and experiments (Early access). JVC/J. Vib. Control 2021. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Barometric Altitude Measurement Fault Diagnosis for the Improvement of Quadcopter Altitude Control. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 15–18 October 2019; Volume 2019. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Nonlinear control of an active heave compensation system. Ocean Eng. 2008, 35, 558–571. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Kim, P. Kalman Filter for Beginners with Matlab Examples; A-JIN Publishing Company: Seoul, Korea, 2010. [Google Scholar]
- CMUcam5 Pixy. Available online: http://www.cmucam.org/projects/cmucam5 (accessed on 13 April 2022).
- Odroid XU4 User Manual. Available online: https://magazine.odroid.com/wp-content/uploads/odroid-xu4-user-manual.pdf (accessed on 13 April 2022).
- Arduino Uno Rev3. Available online: https://store-usa.arduino.cc/products/arduino-uno-rev3 (accessed on 13 April 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Criteria | [27] | Our Work | Merit |
|---|---|---|---|
| Landing (altitude) controller | PID | Proposed DOB controller | Improved Reliability Our solution is theoretically and practically reliable for quadcopter landing on ship decks in the presence of significant external disturbances. |
| Emulator stroke (heaving amplitude of landing platform) | 6 cm | 30 cm | Higher Realism The large stroke of our emulator provides a more realistic approximation of the ship deck’s vertical motion, thus ensuring that our work can be directly applied to real-world applications. |
| Camera system | Visual spectrum camera | IR camera | Multifunction Our approach remains functional even in dark or low-light environments. |
| Number of beacons | 4 | 1 | Simplicity Requiring only one landing beacon, our system can be quickly and easily installed on any landing platform. |
| Symbol | Value | Unit |
|---|---|---|
| m | kg | |
| kg·m | ||
| L | m | |
| g | m/s | |
| deg |
| Parameter | Value | Unit |
|---|---|---|
| Length × Width | × | m |
| Height | – | m |
| Vertical stroke | 300 | mm |
| Vertical speed | 90 | mm/s |
| Symbol | Value and Unit | Description |
|---|---|---|
| K | Controller gain | |
| Controller gain | ||
| Observer gain | ||
| s | Sampling time |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan Mung, N.; Nguyen, N.P.; Pham, D.B.; Dao, N.N.; Hong, S.K. Synthesized Landing Strategy for Quadcopter to Land Precisely on a Vertically Moving Apron. Mathematics 2022, 10, 1328. https://doi.org/10.3390/math10081328
Xuan Mung N, Nguyen NP, Pham DB, Dao NN, Hong SK. Synthesized Landing Strategy for Quadcopter to Land Precisely on a Vertically Moving Apron. Mathematics. 2022; 10(8):1328. https://doi.org/10.3390/math10081328
Chicago/Turabian StyleXuan Mung, Nguyen, Ngoc Phi Nguyen, Dinh Ba Pham, Nhu Ngoc Dao, and Sung Kyung Hong. 2022. "Synthesized Landing Strategy for Quadcopter to Land Precisely on a Vertically Moving Apron" Mathematics 10, no. 8: 1328. https://doi.org/10.3390/math10081328
APA StyleXuan Mung, N., Nguyen, N. P., Pham, D. B., Dao, N. N., & Hong, S. K. (2022). Synthesized Landing Strategy for Quadcopter to Land Precisely on a Vertically Moving Apron. Mathematics, 10(8), 1328. https://doi.org/10.3390/math10081328