1. Introduction
The double-circuit transmission line’s (DCTL) protection is multi-dimensional in a transmission line due to the influence of mutual coupling. Inter-circuit faults (ICFs), cross-country faults (CCFs), and evolving faults (EVFs) are more likely to occur. The protection of a DCTL is multi-faceted and predominance because the conductors have a particular physical geometry. The identification and categorization of ICFs and CCFs through the use of artificial neural networks (ANN) may be found in [
1] and investigations that provide a detailed description of differential relaying techniques for CCFs are described in [
2]. It has been reported that CCFs affect the distance-relaying topology on a transmission system, with 132 kilovolts reported in [
3]. The zone-I in the distance relaying strategy for grounded CCFs and unearthed CCFs is shown in [
4,
5], respectively. There is interference with the effectiveness of the distance relaying plan because the CCF contains faults in two places in contrasting periods. The evolving fault (EVF) also involves primary and secondary faults at various periods during fault initiation [
6]. An algorithm built on the discrete wavelet transform (DWT) and ANN has been explained in detail for the location of the shunt issue, incorporating CCFs and EVFs in a specific-circuit transmission line (SCTL) in [
7].
An adaptive differential relay strategy for CCFs and CT saturation-based approach that uses continuous wavelet transform is discussed in [
8]. In [
9], the author explains a novel relaying technique for detecting multiple locations (MLFs) in series-compensation DCTL. The specific localizations of MLFs in series-compensation of DCTL lines with the utilization of ANN as explained in [
10]. In a case study on the Chhattisgarh state transmission system’s 400 kV DCTL for CCFs and converting faults utilizing real-time data, there have been reports of a digital simulator based on ANN in [
11,
12]. A method for detecting and classifying CCFs based on maximal overlap reports of the discrete wavelet transform known as MODWT can be found in [
12]. These schemes do not consider the high-impedance fault (HIF). The method of high-impedance arcing fault identification based on a DWT analysis of a 154-kV transmission line in Korea is presented in reference [
13]. The electromagnetic interference around the power line was analyzed by utilizing an experimental decomposition mode in a mixture with methods of quantile regression that have been informed for tree-based models for detecting HIFs [
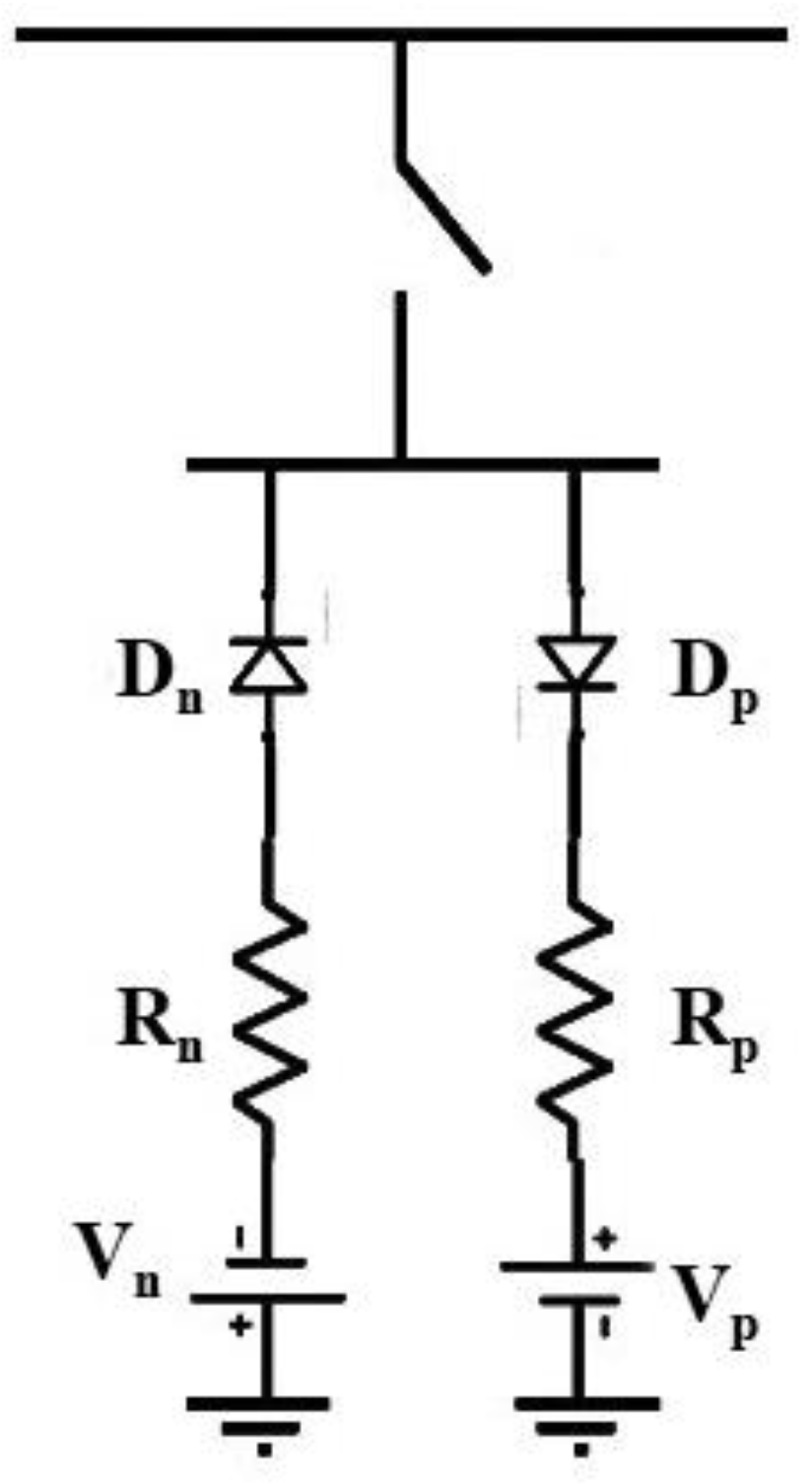
14]. There has been the development of an analytic model for HIF analysis. The model using an electric arc reflection factor is explained in [
15].
Recognition of High-Intensity Interrupting Events (HIFs) in power transmission utilities in [
16] illustrates the application of ANN to nonlinear loads on a 110-kV transmission line. Models based on field research have been built and created to locate HIFs [
17]. Constraints that are distributed evenly transmission model for the detection and categorization of high-frequency interference lines as demonstrated in [
18], as an example. An issue with the lack of synchronization in a double-fed 345-kilovolt transmission, the location identification for HIFs, is explained in [
19]. An assessment of the HIF in real-time recognition utilizing DWT in the EHV transmission network has been observed in [
20]. A technique based on the cumulative standard deviation sum [
21] illustrates the detection and classification of high resistance problems. Classifying HIFs within a unified power flow conditioner (UPFC) performed DCTL compensation with differential power has been documented in reference [
22]. An additional consideration, based on alienation, of [
23] demonstrates the use of voltage indications for fault detection and categorization. It has been stated in [
24] that a HIF fault-locating system for series-compensation transmission lines [
25] details a digital distance-relaying technique that can be used when transmission lines develop problems with high resistance. An algorithm based on neuro wavelets for identification of the use of high-intensity fields (HIFs) in extra-high-voltage (EHV) transmission networks is referred to as seen in reference [
26]. It is demonstrated in [
27] how HIF detection can be carried out in transmission lines by using a distance relay. The transformation of boundary wavelets has been utilized in detecting HIF [
28] and faults in distribution networks in the presence of scattered generational sources. It was reported in [
29] that they used a data mining-driven wavelet transform. It has been informed that there was an experimental case study of simultaneous faults inside a DCTL [
30]. In addition to that, these strategies cannot work in the example of a DCTL due to the effect of mutual coupling as well as the complicated characteristics of CCF associated with HIF syndrome. Identifying and characterizing CCF-HIFs as having HIF syndrome is essential to prevent any problems with the long-distance relay.
A tunable Q-factor wavelet transform is flexible in detecting signals’ disturbances and efficiently extracts the signal’s fundamental frequency component. This made researchers use extensive fault diagnosis algorithms. Thirumala et al. proposed a Power Quality Disturbances diagnosis method using a Tunable Q-factor wavelet transform and Support Vector Machine classifier, which is discussed in [
31]. A TQWT-based bearing fault identification in time-varying fields has been proposed in [
32]. TQWT has also been implemented to detect train axle bearings faults [
33]. Zhang et al. presented a method to identify faults in a planetary gearbox [
34]. Knowledge-Based Neural Network and TQWT-based method diagnosis of Power Quality Disturbances are discussed in [
35]. In this paper, the AdaBoost method is used to classify fault zone, as this algorithm has more accuracy than other algorithms.
In this paper, the TQWT-based normalized energy values are used to come up with a way to find and classify faults in the case of cross-country faults with HIF syndrome. It is the first time TQDWT has been used to find and classify cross-country faults in transmission lines with HIF syndrome. In this research work, an IEEE 39 bus network has been modeled utilizing the software MATLAB/Simulink through an ideal HIF model to recreate a typical fault condition like CCF-HIFs. The voltage and voltage signals are monitored at the bus or node sending them. The TQWT’s analysis of the lines is also being carried out. Since the TQWT may be tweaked and built on the oscillatory behavior of the signal being applied, it has been employed for signal processing. TQWT is built on a real-valued scaling coefficient or dilation coefficient. Its implementation uses a complete reconstruction oversampled filter bank through real-valued sampling coefficients. In addition, TQWT uses a real-valued sampling coefficient to determine the size of the window. In this research article, the method that has been suggested is to classify CCF-HIFs into the appropriate categories so that it is cleaned up as quickly as possible so that the power supply can be restored.
Significant contributions to the paper include:
This research demonstrates that the TQWT-based feature-extraction method significantly facilitates CCHIF fault signal detection, classification, and recognition. Feature extraction aims to reduce the number of features in a dataset by making new features from the ones already there (and then discarding the original features). Reducing the number of signal characteristics by statistical feature selection and feature elimination (TQWT) has been demonstrated to be an effective method for classifying proposed events. It also explains how to select a decomposition level that expedites and improves the accuracy of the process.
As long as the same basis function and decomposition layer number are used, the quality factor of the continuous wavelet transform remains unchanged. As long as they stay within the normalization factor’s parameters, wavelets of varying sizes can keep their energy level constant. However, the wavelet energy at each scale depends on the scale because the quality factor of TQWT is tunable. In this article, optimized values of the Quality factor (Q), Redundancy factor (r), and the number of decomposition levels (J) have been proposed to take the algorithm accurate.
Achieving system observability, which is critical for accurately assessing the power system’s state, relies heavily on the strategic placement of meters. This research provides a solution that can be used to determine the best possible sites at which to install the meters. The following clause describes such procedures: Jelly Fish is an optimization algorithm used to precisely place meters as part of this research effort.
The entropy of a signal is a useful statistical measure because it may be used to infer important information about the state of the system producing the signal. Therefore, entropy can serve as a valuable non-parametric tool for extracting features from data generated by industrial systems. The concept of normalized entropy was implemented in this study to improve fault diagnosis, especially cross-country faults with HIF syndrome. Theoretical methods for investigating the applicability of normalized entropy indices in the context of fault feature extraction from discrete data are proposed.
3. Optimal Placement of Smart Meters through Jellyfish Optimization Technique
The proposed research problem is a non-convex optimization problem. The constraint type is inequality constraint. It has non-linear equations and variables. This non-linear nature of the problem makes it efficient and easy to model as a heuristic optimization problem. The problem has one integer/binary constraint.
The fault in the distribution line must be detected, and Smart Meters must be installed to identify the fault. The installation cost can be reduced by reducing the number of fault detectors. A necessary optimization approach should be employed to reduce the number of Smart Meters and discover the ideal location of a smart meter. A Jellyfish-based optimization approach is used in this paper to discover the ideal position of the smart meter. The objective function of the Optimal Placement Problem (OPP) is given by:
Subject to
where
A represents a matrix of connectivity, and
n denotes the buses’ number. The
element of matrix A is represented as follows:
whereas B represents a column matrix and is described as
.
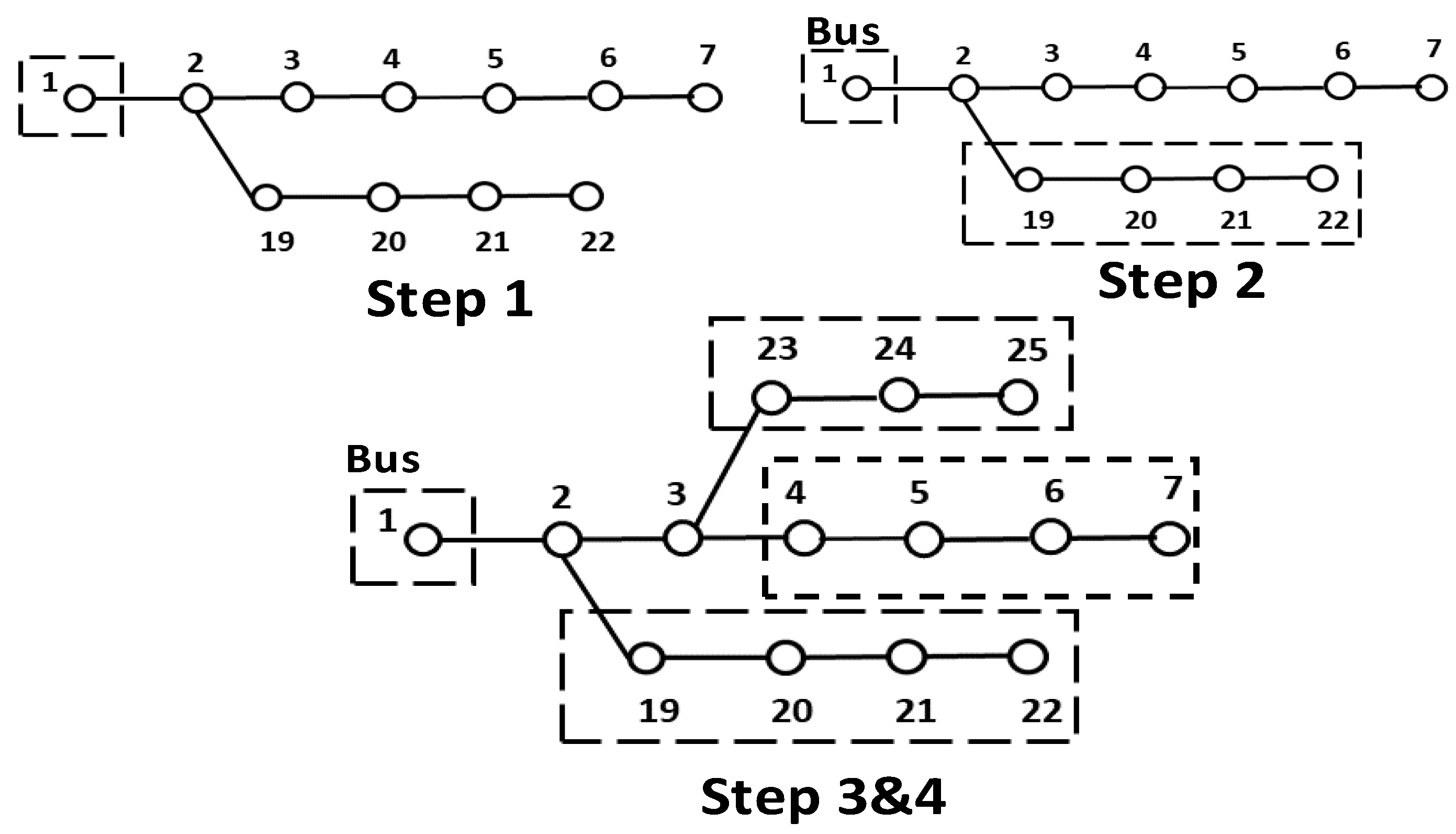
The first step in the index technique [
40] is to pick the bus that serves as the system’s terminal. The bus that serves as the system’s terminal is the bus that is linked to no more than one other bus in the whole network. A smart meter that is installed on the terminal bus is only able to monitor a maximum of two buses at a time: the terminal bus itself and the bus that is connected to the terminal bus. Therefore, the smart meter is positioned on the bus that is connected to the terminal bus being observed. After positioning the smart meters on the bus that is adjacent to the terminal bus, the search for the bus with the highest connectivity index, if there is one, is narrowed down to a single candidate. The number of previously undetected buses that may be seen through smart meters when it is positioned at a certain bus is what is meant to be understood by the term “connectivity index”. The value will be determined for the i
th bus by taking the negative of the sum of all of the components in the i
th row of matrix A.
If the connection indices of more than one bus are the same, the best bus to use is the one and only one that has the greatest evolution index, if there is one. When an additional smart meter is installed at a specific bus, while keeping smart meters at all other previously assigned locations unchanged, the total of all elements of the resulting A matrix is used to calculate the evolution index of the bus. This index is referred to as the evolution index. The presence of a high evolution index in a bus indicates that it is connected to other buses that have a reduced level of connectivity with the rest of the system. Because of this, priority should be given to that one bus in particular, which connects buses that are less accessible and not watched.
The demise of index methodology could have occurred for two distinct reasons.
The “A” matrix vanishes, denoting that the system may be fully observed with just a few known locations. That’s why we can skip the Jelly Fish Optimization Algorithm.
There is no single bus that has the highest connection index or has the highest connectivity index and the highest evolution index, therefore there will still be unseen buses even after smart meters have been placed in a predetermined set of places according to the index approach. Therefore, the Jellyfish optimization process must be used if we want to acquire a whole set of ideal sites.
Jellyfish Search Optimizer
The Jellyfish Search Optimizer (JSO) is one of the latest metaheuristic optimization algorithms developed by J-S Chou and D-N Truong in the year 2020 [
26]. The framework of the JSO has been inspired by the behavioral mechanism adopted by the jellyfish to search for their food in the ocean voltage. The execution of the JSO is governed by three integral behavioral aspects of the jellyfish: (i) the jellyfish traverses with the ocean voltages or makes its association inside a swarm for its movement. The switching between these two movements is governed by a time control mechanism; (ii) The jellyfish traverses in search of nutriment and in this process they are enticed to the position which has a large amount of food; (iii) The amount of food traced during the movement of the jellyfish is computed considering location and objective function of the JSO.
A. Ocean Voltage
The abundant availability of nutrients in the ocean voltage attracts the jellyfish towards it. The ocean voltage (
) direction is computed based on the average value of vectors obtained from each of the jellyfish to the position of the jellyfish, which is having the best location, which can be represented by (34) and (35):
where
The (34) shows the population of jellyfish has been stated with , denotes the jellyfish’s voltage best location, resembles the mean position determined for the jellyfish, is the factor that governs the attraction, and signifies the difference between the latest best jellyfish position and the determined mean position of all the jellyfish.
A normal spatial distribution has been assumed for taking into account the distributional behavior of the jellyfish. Thus, a distance of
has been considered within the close vicinity of the mean position having the likelihood for the presence of all jellyfish, where
represents the standard deviation considered for the spatial distribution. This can be mathematically represented by:
Thus, based on the above mathematical expressions, the (38) can be represented in a simpler form:
where
The latest updated position of the jellyfish can be represented by:
Similarly, the expression (38) can be written as:
In (43), represents the distribution coefficient and the value of , which has been taken based on the 30 independent trial runs.
B. Swarm of Jellyfish
The jellyfish swarm exhibits two variants of motion in the ocean voltages: Type A (passive movement) and Type B (active movement). During the initial stages of the swarm formation, Type A movement is represented by most of the jellyfish, and with an increase in the time duration they switch their motion from Type A to Type B. In the case of Type A motion, the jellyfish maintains its motion around its group, and the position update in this scenario can be obtained by:
where
and
are the upper boundary and lower boundary, respectively, of the search space;
resembles the motion coefficient that governs the traversing movement around the position of the jellyfish.
During the initiation of Type B motion, a jellyfish (
) is selected randomly, which has to be different from the jellyfish of interest (
). The direction of motion is determined by utilizing a vector from (
) to (
). In case, the extent of the food located at the position of (
) is greater than the quantity of food available at position (
), (
) moves towards the position of (
), whereas if the extent of the food availability at (
) is less as compared to (
), then (
) moves in the direction opposite to the movement of (
). Thus, this behavior of the jellyfish helps it to move towards a better position to search for food. This traversing behavior helps the jellyfish to exploit the search space effectively and can be mathematically represented by:
where
where
resembles the objective function and
resembles the jellyfish location.
The position update of the jellyfish is given by:
C. Time control mechanism
A time control mechanism is introduced to identify the type of movement during the complete execution of the JSO. It regulates not just types A and B swarm motions, but also jellyfish actions in the direction of ocean voltages.
Jellyfish can be taken to the ocean voltage for providing enormous amounts of nutritious food. More jellyfish assemble over time, becoming a swarm. The jellyfish travel into another ocean voltage when there is an alteration of the temperature or wind parameters, and this results in the formation of another jellyfish swarm. A jellyfish swarm’s movements are divided into two types: Type A (passive motions) and Type B (active motions), which the jellyfish alternate between. During the initial phase, Type A is chosen; as time passes, Type B motion comes into the framework. To replicate this condition, the time control technique has been introduced. The time control method incorporates a time control function
and a constant
to govern the traversing behavior of the jellyfish between trailing the direction of the ocean voltage and migrating inside the swarm. Here,
and
is considered as 0.5. The value
is contrasted with the value of
during the execution of JSO. If the value of
>
, the jellyfish behavior is governed by the ocean voltage and if the value of
<
, the jellyfish traverses within its swarm. The mathematical representation of the time control function
is obtained by:
where
is the iteration number and
denoted maximum iteration.
D. Initialization of Jellyfish Population
The initialization of the population is carried out randomly for JSO. The drawbacks of this strategy include its delayed convergence and proclivity to become caught at local optima due to poor population diversity. Thus, the verity of the initial population is enhanced with several chaotic maps such as the logistic map, tent map, and Liebovitch map have been developed. The logistic map, which has been developed by May, has been introduced to generate more diverse populations than random selection and prevents the probability of premature convergence.
where
represents the logistic chaotic value of the position for
jellyfish,
is a constant set to 4.0, and
generates the jellyfish population where
.
E. Boundary condition
Oceans may be got all over the earth. As the structure of the earth can be roughly spherical, a jellyfish that wanders outside the confined search region will eventually return to the opposite bound. This re-entering phenomenon is given by (46):
where the position of the
jellyfish is denoted as
for
dimension.
is the updated position post verifying the search area boundary constraints.
and
are the upper and lower limits of the search space for
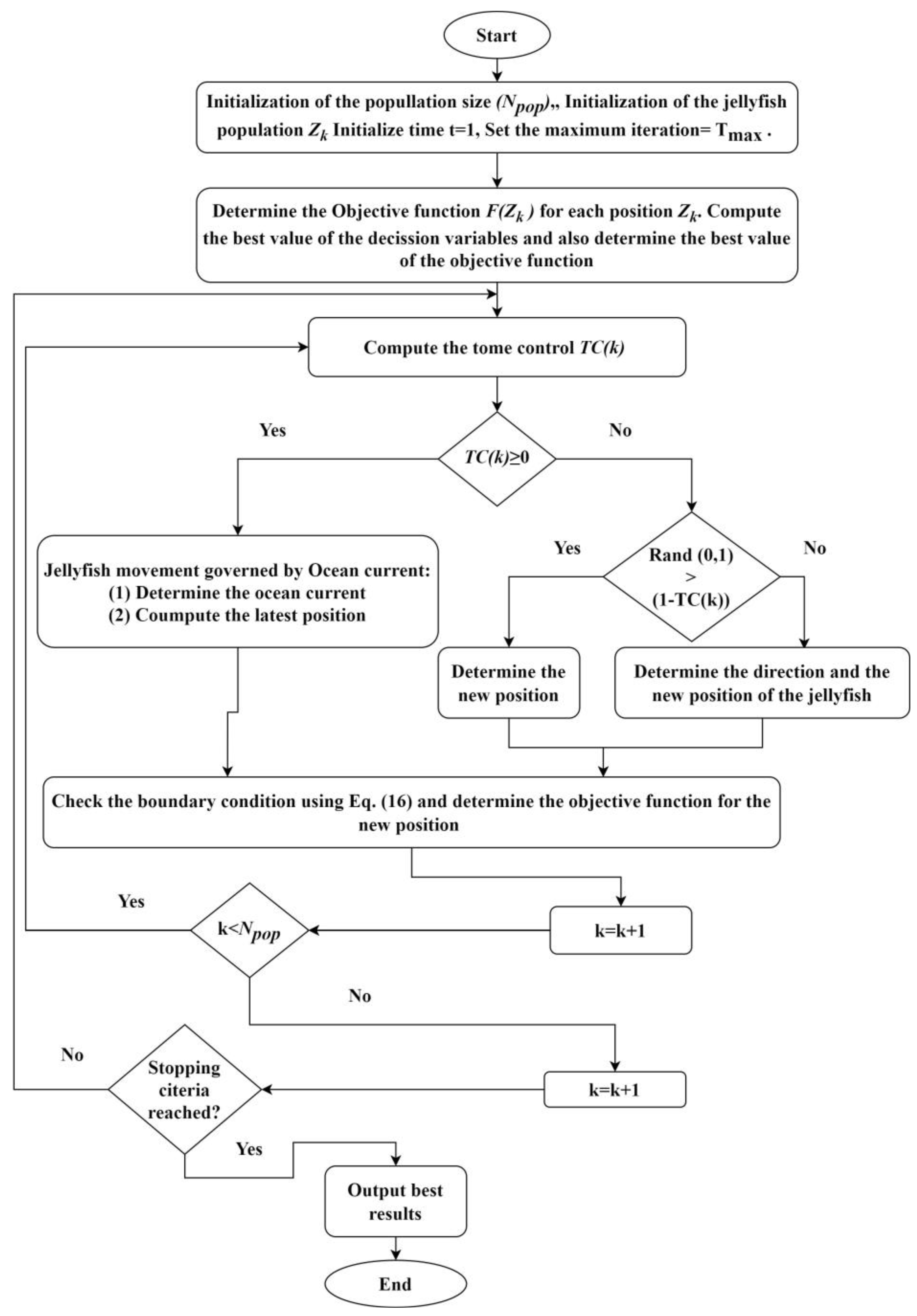
dimension. The block diagram of the jellyfish optimizer for the optimal location of smart meters placement is depicted in
Figure 2.
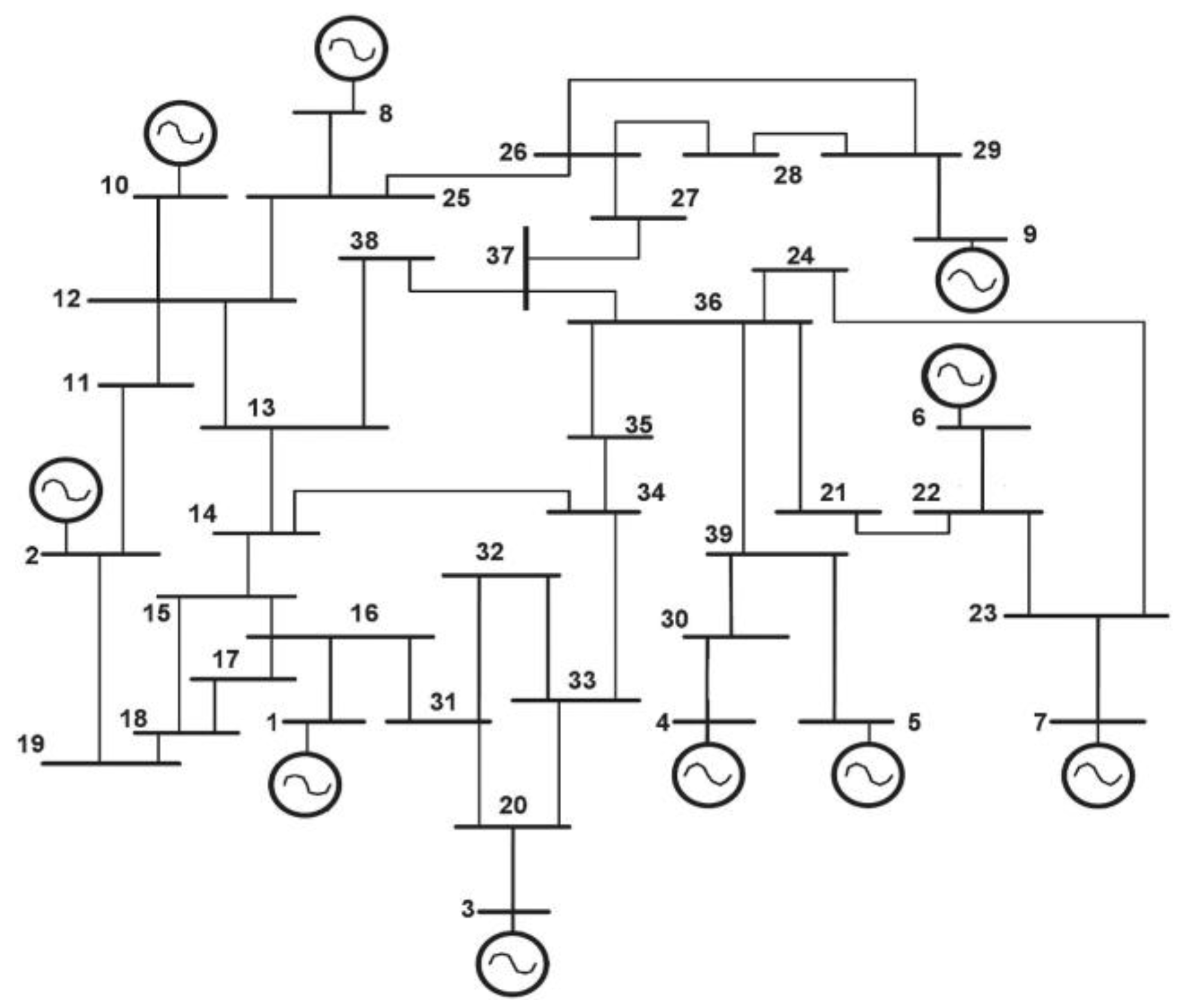
6. Results and Discussions
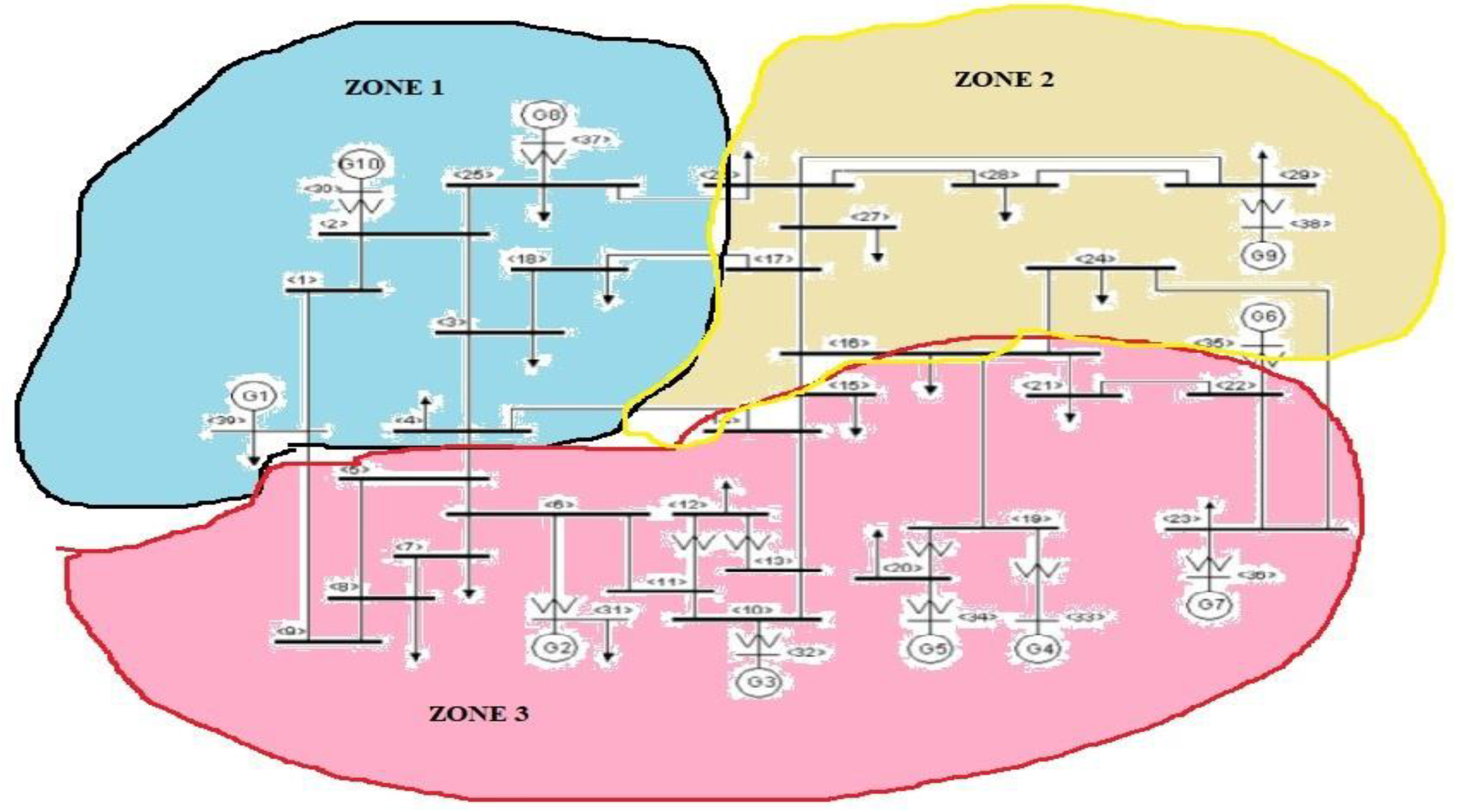
The suggested approach has been evaluated in IEEE 39 bus scheme shown in
Figure 4. The details of the IEEE 39 bus scheme can be found in [
38].
Figure 5 highlights the optimal location for the placement of the measuring devices with the application of JSO. The sampling time has been taken as 0.0997 ms, which resembles a 10.025 kHz sampling frequency. Thus, for the TQWT approach, 10.025 kHz has been fixed as the sampling frequency. In this proposed work, the sample size has been a vital parameter along with the sampling frequency. Here the number of samples is 2048 which is collected for 20 cycles.
To select the proper decomposition level and mother wavelet a proper algorithm has been chosen which is shown in
Table 1 which is based on MDL. As per
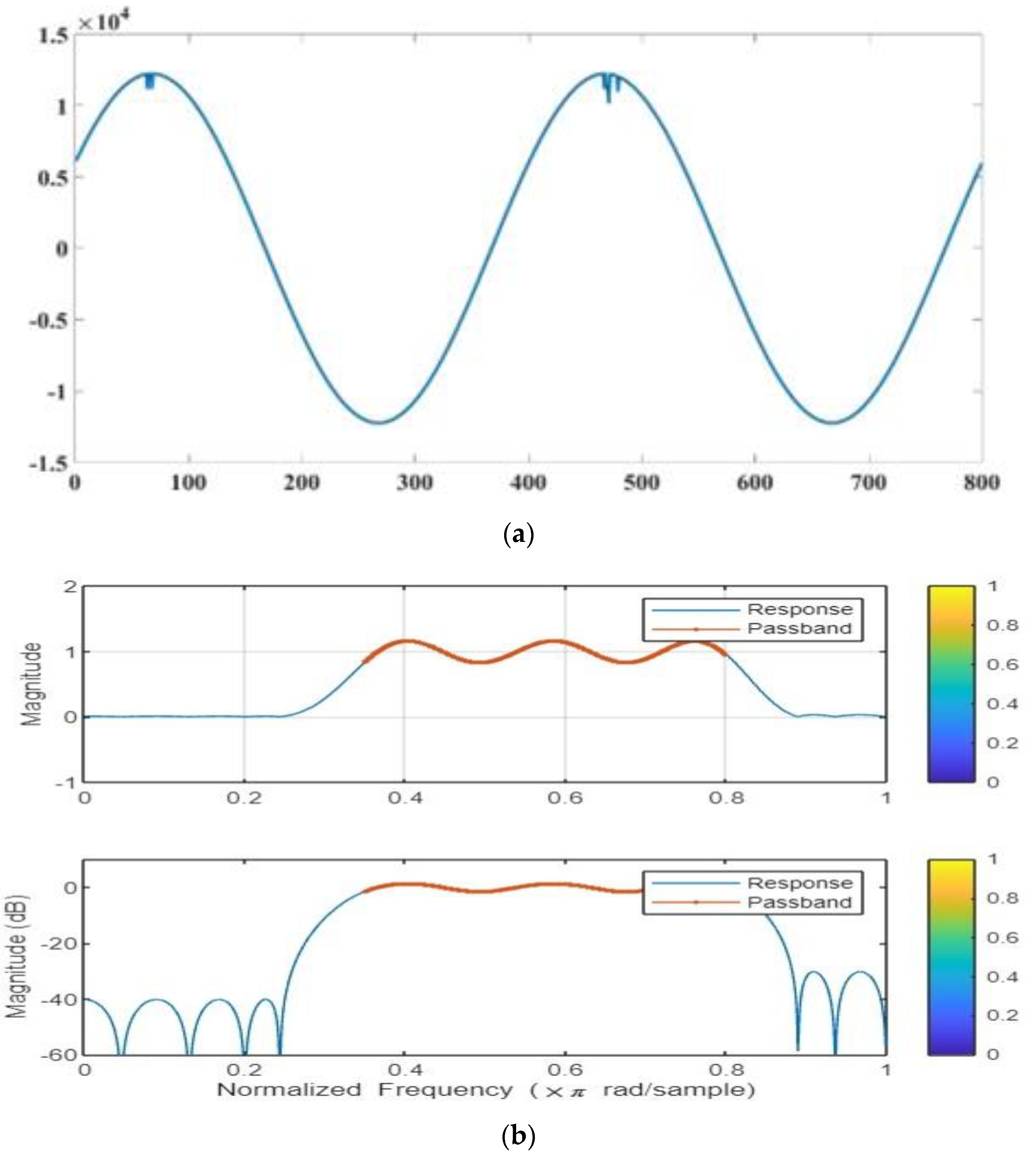
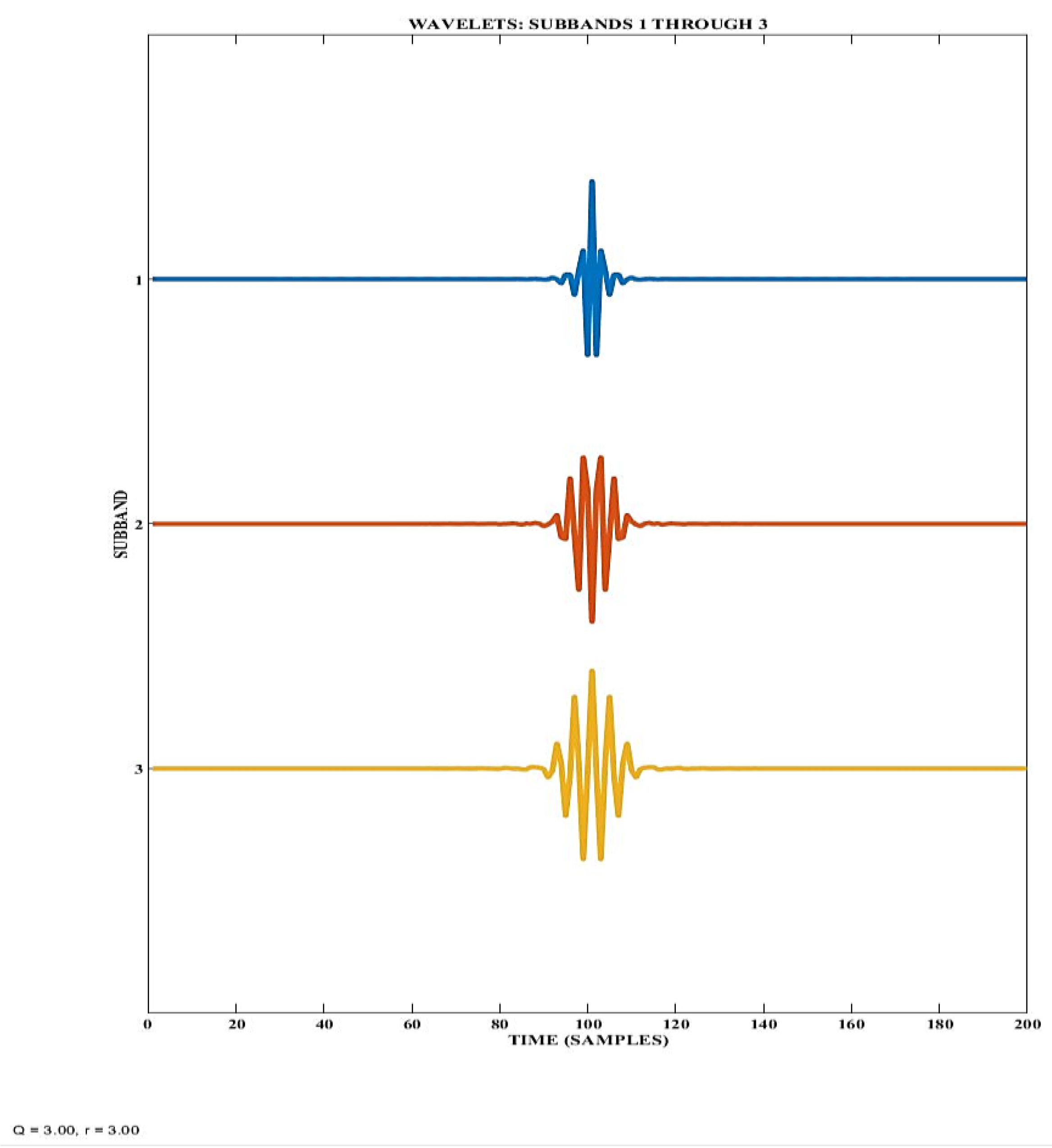
Table 1, level 3 with dB 10 is showing a minimum MDL value, i.e., −100.19. So, the fault voltage signal is decomposed up to level 3 to avoid the computational burden with a Q value is 3 and the r value is considered 3 which is shown in
Figure 6a. After considering this value, level 3 is such a sub-band level where we found maximum energy distribution which can capture maximum fault-related information or features. The maximum sub-band frequency distribution is shown in
Figure 6b. After j is determined, Q and r are selected to ensure that the fundamental and harmonic components are exactly extracted from the input signal, since the fundamental component with 50 Hz frequency is essential to select proper Q and r values for different PQ disturbance signals.
6.1. Feature Extraction of HIF Fault
Mathematical domains that exhibit the HIF’s properties, such as its unpredictability, nonlinearity, nonstationary nature, and asymmetry, can be investigated via feature extraction. One should add a feature selection step to the design if the number of features derived from the analysis domain is significant, as this will raise the complexity of the classifier. Selecting the most informative features from a large feature set is the goal of feature selection.
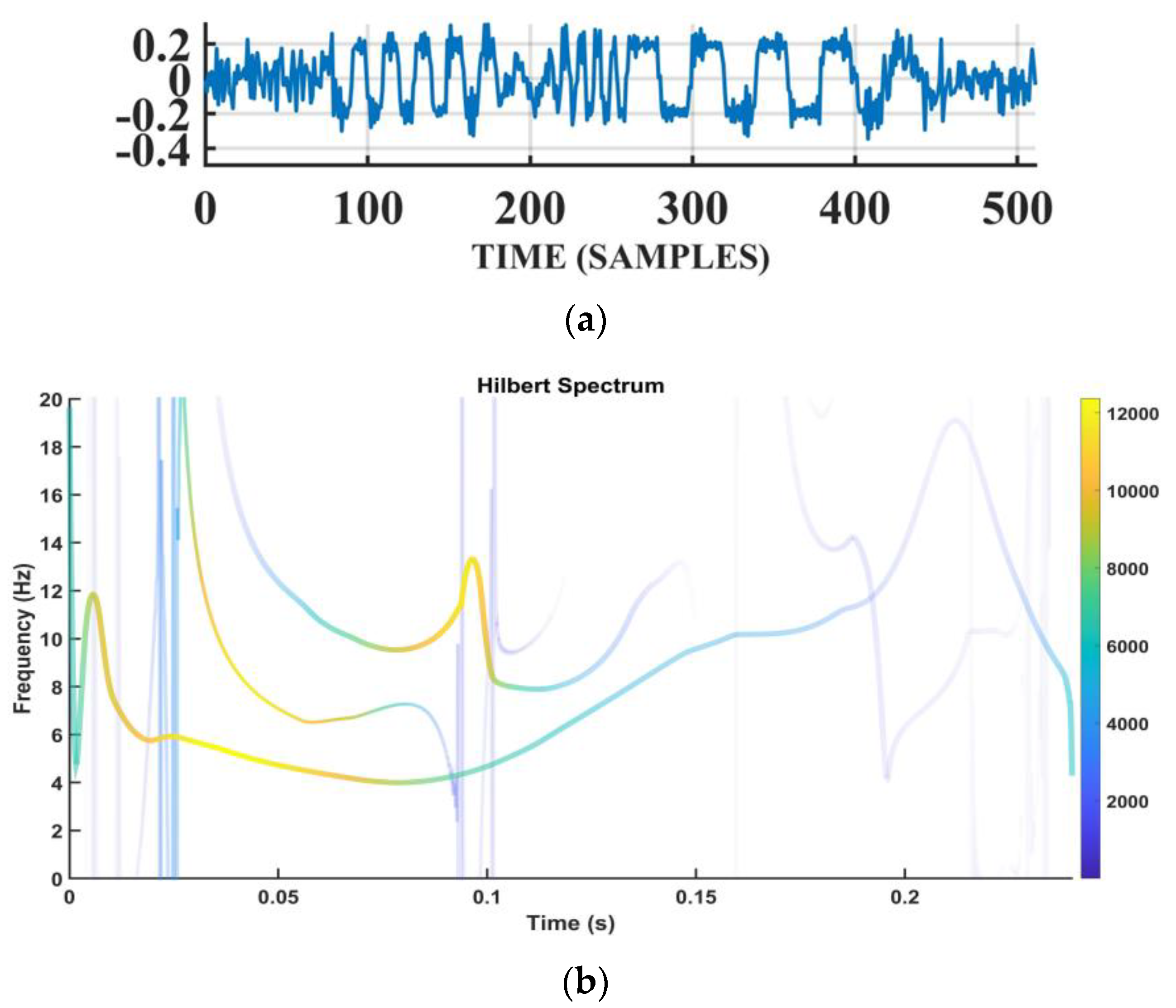
The time domain waveform of the High Impedance fault is displayed in
Figure 6. During this malfunction, there is a lot of noise in the signal, which pollutes the signal and dilutes the signature characteristics. The 3 dB bandwidth attenuation method [
39] yielded the characteristic frequency band depicted in
Figure 6b. The maximum value on the Magnitude vs. frequency curve corresponds to a driving frequency of 2048 Hz, while the upper and lower limits of the typical frequency band are indicated by the 3 dB bandwidth. It can be observed, the proposed optimal feature band selection approach is effective, as the major information of the signal can be contained within the region of 3 dB bandwidth. TQWT decomposition layers chosen from the upper and lower boundaries of the characteristic frequency band are depicted in a schematic form in
Figure 6b.
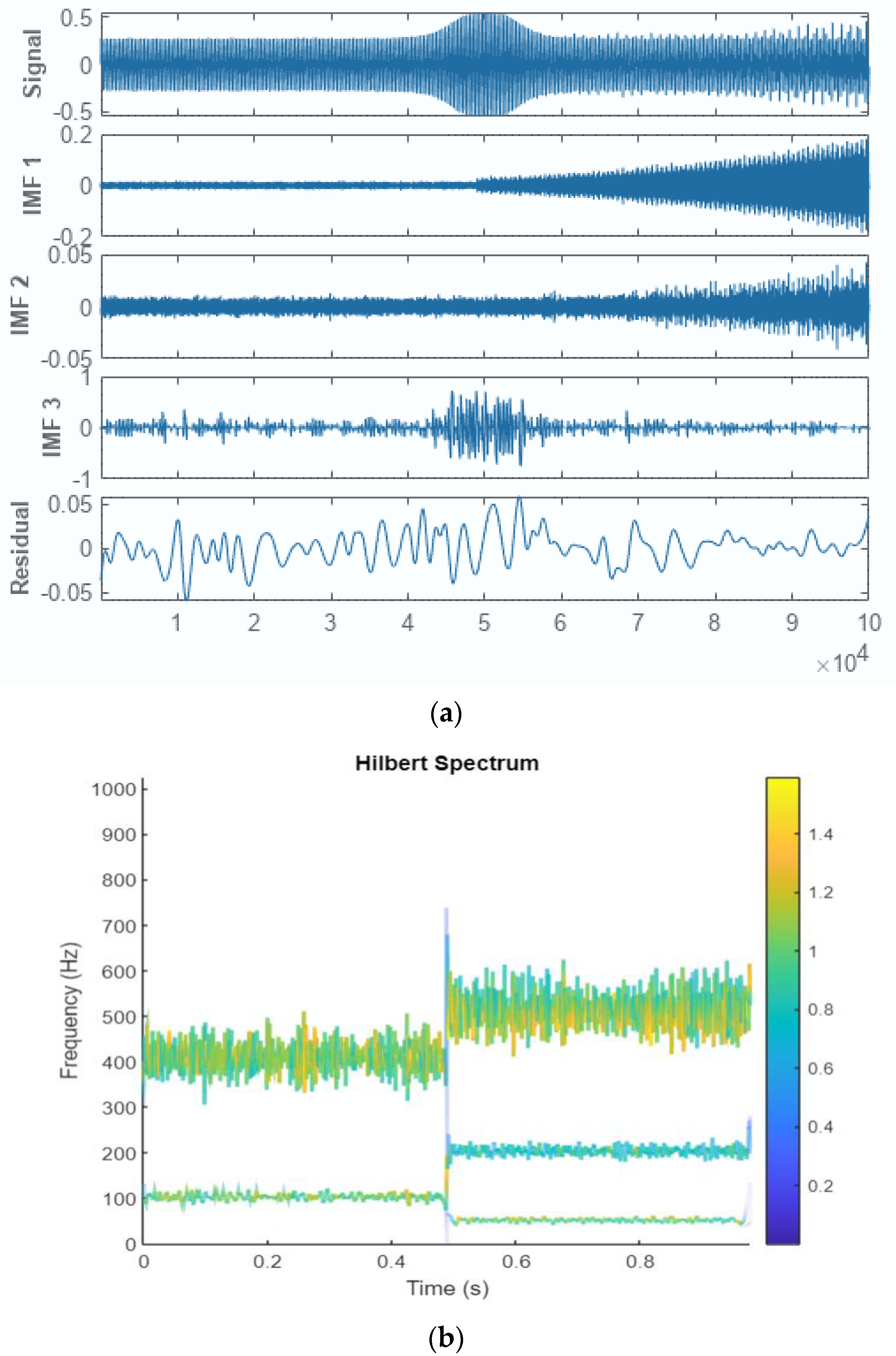
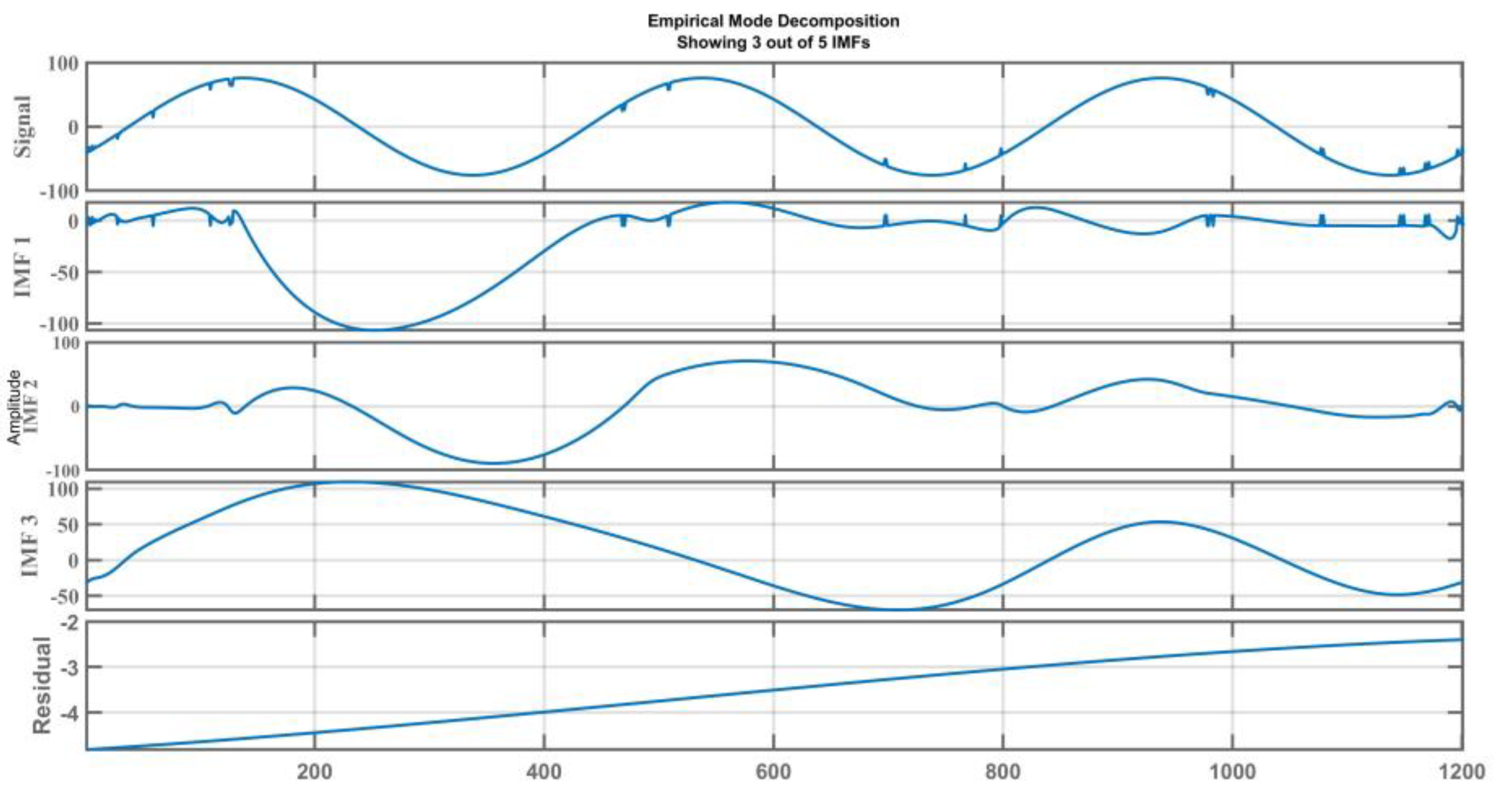
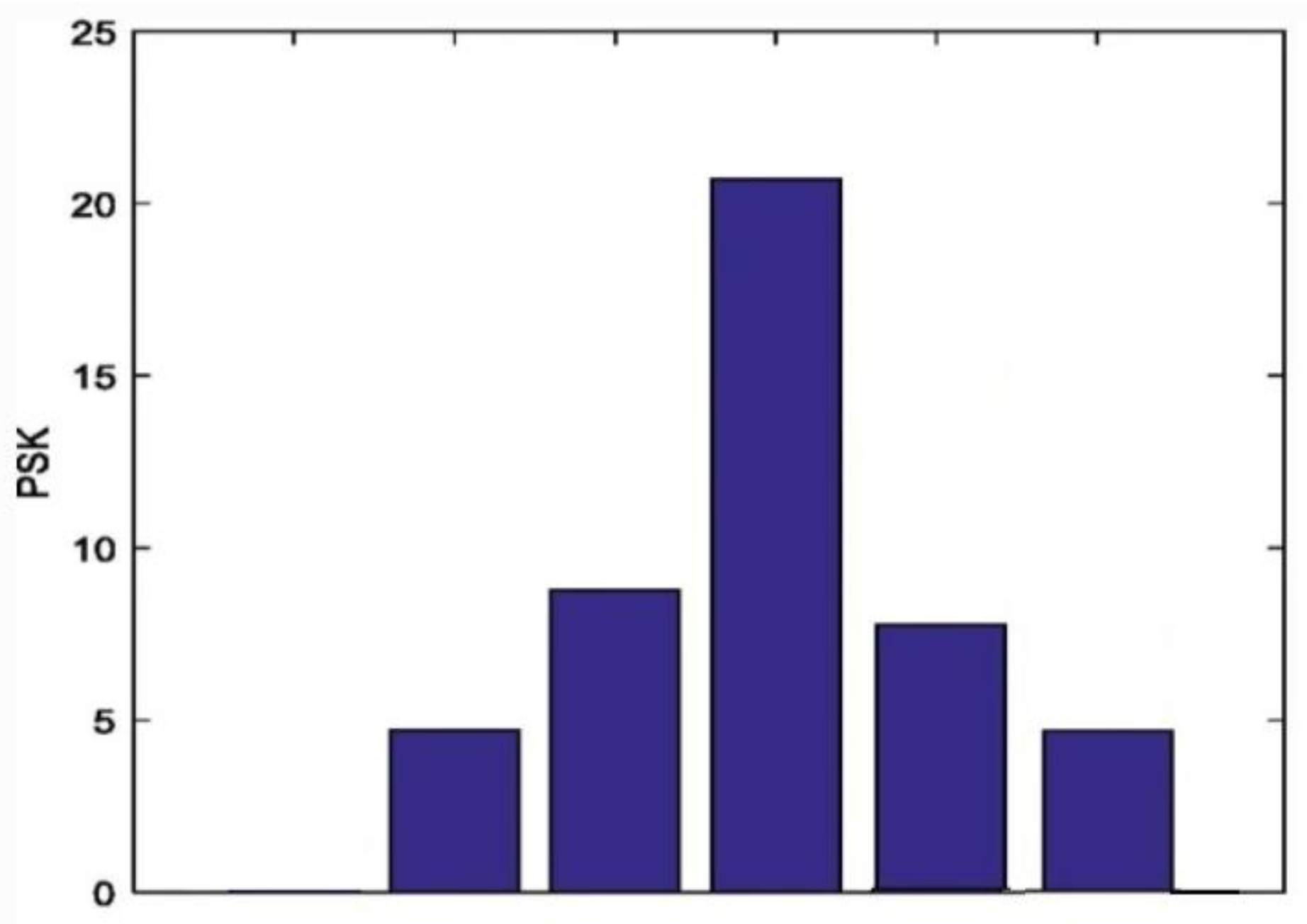
In particular, the purpose of this research is to present a method for detecting the HIF that is based on a joint application of ensemble empirical mode decomposition (EEMD) and tunable Q factor wavelet transform (TQWT). First, the EEMD is applied to the signal in concern so that the voltage signal can be broken down into its intrinsic mode functions (IMFs). Then, the third IMF is selected as the highest PSK value. In this application IMF 3 has got the highest PSK value as per
Figure 7 that shows the PSK value of each characteristic sub-band.
Figure 8a,b depict the waveform and envelope spectra of the characteristic sub-band signal retrieved using wavelet packet decomposition and Ensemble empirical mode decomposition (EEMD) [
39] decomposition, respectively, in the time domain based on (16). Three IMFs were created using the EEMD technique, and the ideal characteristic of the sub-band for IMF3 was calculated using the same maximum PSK value according to (22). As can be seen in
Figure 8, the EEMD technique uses random noise to lower the amount of mode aliasing during the decomposition of the signal. Applying the M-point discrete Fourier transform (DFT) to E
y(j, n), we obtain the frequency domain sequence F
E(j, ω), and then we calculate the power spectrum P
E(j, ω) of the signal envelope of layer j where j = 3. As per the PSK value level, 3 can capture most of the information so signature features can be plotted as per (22). Moreover, the frequency and its frequency harmonic components of 1–5 that make up the impact characteristic are easily identified, demonstrating that the suggested method can extract the impact characteristic even when dealing with high levels of background noise.
The upper and lower frequency limit of the typical frequency band establishes the number of TQWT decomposition layers as shown by the Koutogram which is shown in
Figure 6c. The kurtosis of the power spectrum is then used to identify the best possible characteristic sub-band The number of decomposition layers and mother wavelet has been selected as per
Table 1.
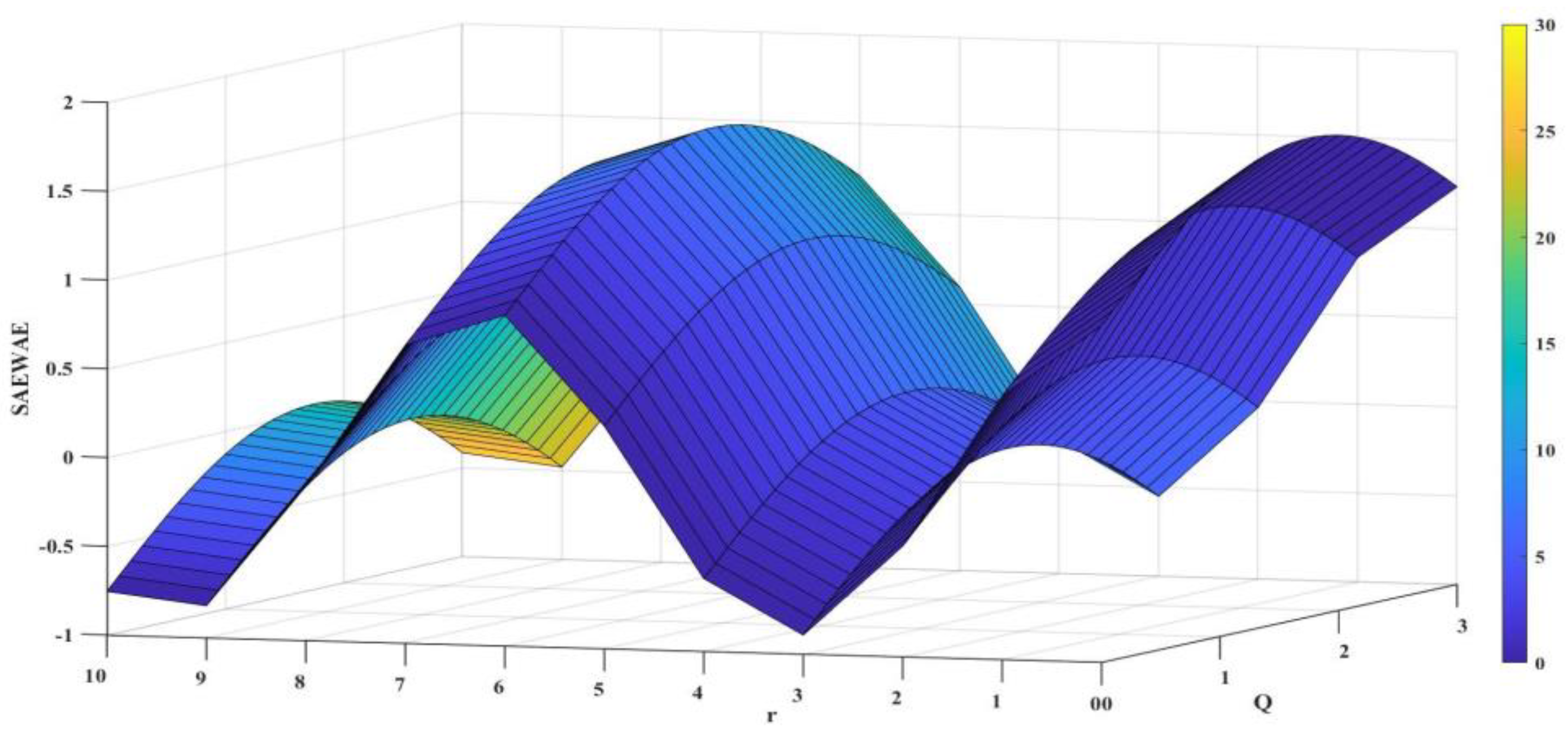
When Q = 1 and r = 3, as shown in
Figure 9 that depicts the SAEWSE value in the two-dimensional grid search space of parameter (Q,r); the ideal parameter (Qopt = 1, ropt = 3) is found based on the minimal SAEWSE curve value and the value of SAEWAE is the lowest. So these values are selected in this method. The parameters Q, r, and J were chosen based on their ability to maximize the weighted wavelet Shannon entropy of the sub-band average energy according to (18). The results of different decomposition layers are displayed in
Figure 10. Based on the optimal parameters Q = 1 and r = 3, the simulation signal is broken up into four layers.
6.2. Feature Extraction of CCHIF Fault
Based on
Figure 11 three IMFs were created using the EEMD technique, and the ideal characteristic sub-band for IMF3 was calculated using the same maximum PSK value according to (22). After applying (22) the PSK value is showing highest at level 3 which is shown in
Figure 12 that shows the PSK value of each characteristic sub-band.
Figure 13 is the frequency and its harmonic components of 1–5 that make up the impact characteristic are easy to find. This shows that the suggested method can extract the impact characteristic even when there is a lot of background noise.
Figure 14 presents the results of applying TQWT to the faulted signal to perform decomposition (d–f).
Figure 15 depicts the SAEWSE value in the two-dimensional grid search space of parameter (Q,r); the ideal parameter (Qopt = 1, ropt = 3) is found based on the minimal SAEWSE curve value. It displays the minimum SAEWSE value, which identifies the best parameter with which to decompose the recorded signal, as Q = 1 and r = 3.
Figure 14 shows the CCHIF fault time domain waveform. During this malfunction, the signal is polluted and diluted by noise.
Figure 14 shows the characteristic frequency spectrum from 3 dB bandwidth attenuation (e). The 3 dB bandwidth indicates the upper and lower bounds of the usual frequency band, which is 2048 Hz on the Magnitude vs. frequency curve. The optimal feature band selection strategy works because the pulse’s main information fits inside the 3 dB bandwidth. This figure shows schematic TQWT decomposition layers from the upper and lower characteristic frequency band borders (b) MDL determined the number of decomposition layers to speed up this approach. The Koutogram in
Figure 14 shows the number of TQWT decomposition layers based on the typical frequency band’s upper and lower limits (c). The power spectrum kurtosis determines the best characteristic sub-band. SAEWAE is lowest when Q = 1 and r = 3 (
Figure 15). This method selects Q and r values for the TQWT application.
To extract the impact characteristics of the CCHIF fault, the proposed approach based on TQWT has been applied to extract the fault features. Based on the calculated parameters of TQWT parameters (Q = 1 and r = 3) features have been extracted. The factor redundancy r is the overall number of wavelet factors split by the length of the input signal to which the TQWT is employed [
37]. As here the number of coefficients is 6144 and the length of the signal or number of samples is 2048 so here r = 3. The width of the bandpass filter is related to the Q-factor. The bandpass filter is significantly wide for low Q-factor, and few levels are needed for covering the spectral content of the signal of interest. The narrow bandpass filter is associated with a high Q-factor, and hence more levels are necessary for covering the spectrum of the signal. Hence in this method, Q = 1 has been chosen as the number of decomposition levels is 3. As per the filter specification in (6) and (7)
, μ = 0.666 and β = 0.778, hence the value of r = 3.
The entropy of each signal at every sub-band level is calculated. The optimal solution of the objective function is obtained as illustrated in (32–33) and the optimal solutions are also shown in
Table 2. In
Figure 6, a normal HIF fault is simulated in IEEE 39 bus system. In this figure voltage signal and sub-band energy, distribution has been shown to distinguish it from the CCHIF fault. The decision rules are made according to the values occurred by mean entropy values which are shown in
Table 3 at every transient to identify and classify CCHIF from normal HIF fault and low impedance faults. In the second stage, a new zone protection scheme is proposed baes on the graph theory concept. This method divides a Transmission system into different zones to make protection easier and more efficient to handle the fault condition. As there are 6144 coefficients here and 2048 samples, r = 3. The Q-factor has something to do with how wide the bandpass filter is. The bandpass filter is very wide for having a low Q-factor, and it only needs a few levels to cover the signal’s spectral content. The high Q-factor of the narrow bandpass filter means that it needs more levels to cover the whole spectrum of the signal.
Figure 6 shows that there are three levels of decomposition, so Q = 1 was chosen for this method. According to the filter requirements in (7) and (8), =0.666 and =0.778, so r = 3.
The jellyfish search optimization technique is used to put the meters in the best place. The optimal solution of the objective function is shown in (51), and
Table 2 also shows the optimal solutions for placing the metering devices.
To distinguish between CCHIF, HIF, and low impedance faults, the decision rules are based on the mean entropy values that are shown in
Table 3 for each transient. In the second step, an idea from graph theory is used to come up with a new way to protect zones. This method divides a transmission system into different zones to make fault condition protection easier and more effective.
6.3. Calculation of Normalized Entropy
Table 3 represents the different mean or normalized entropy values based on [ for different power quality disturbances. In this paper, normalized values have been chosen to apply in all distribution networks. After rigorous experiments, it has been decided that these normalized entropy values are fixed for every distribution system, so these values are taken as significant values to differentiate between CCHIF and Non-CCHIF.
Decision rules are made according to the results that occurred from
Table 3. According to these decision rules, entropy values falling below 0.2 are healthier signals, and values between 0.2 and 0.5 are categorized as high-impedance faults. The entropy values, which are above 0.5, are categorized as Low impedance Faults. CCF-HIFs are classified as high-impedance ground faults taking place in different phases of the individual circuit at several places at the same time as the fault initiation time. So, in this case, voltage and voltage waveform becomes more distorted. So, in this type of fault entropy value is showing higher than the normal HIF fault. As in this method we have considered normalized entropy, hence these values can be applied to any transmission lines.
Fault-diagnosis methods that rely heavily on data typically involve summarizing a large number of process variables into diagnostic sequences with fewer dimensions. The initial time series is expanded into empirical modal functions, and the Hilbert transform is applied to these functions [
41] so that the instantaneous amplitudes and frequencies may be calculated at each instant in time. In addition, the TQWT coefficients that were acquired at level 3 and the instantaneous amplitudes are utilized for the automatic identification of ideal combinations of the variables that are used in the process of polar feature extraction. The polar plot representation method creates important measurements that may be used to determine which process variables contribute to fault conditions, and TQWT feature extraction enables process monitoring in feature and residual spaces.
Figure 16a,b polar plot depiction of the features that were retrieved from the power system faults.
6.4. The Effect Brought by the Changing of the Reactor String
In this section, the suggested fault diagnosis strategy is put through its paces under a variety of operating and switching conditions. This is accomplished through the switching function of reactor strings, such as line reactors. In IEEE 39 bus system, 50 MVA reactor strings were connected and CCHIF has created to determine the fault feature. In
Figure 12 distorted voltage signal and extracted features are shown.
Figure 17, which shows the frequency response of the TQWT band-pass filter, shows that three decomposition layers make the most sense.
The factor redundancy r is the total number of wavelet factors divided by the length of the signal that the TQWT is used on [
37]. As there are 6144 coefficients here and 2048 samples, r = 3. The Q-factor has something to do with how wide the bandpass filter is. The bandpass filter is very wide for having a low Q-factor, and it only needs a few levels to cover the signal’s spectral content. The high Q-factor of the narrow bandpass filter means that it needs more levels to cover the whole spectrum of the signal.
The jellyfish search optimization technique is used to put the meters in the best place. It is used to figure out the entropy of each signal at each sub-band level. The optimal solution of the objective function is shown in (27), and
Table 2 also shows the optimal solutions.
To determine the difference between CCHIF and low impedance faults, the decision rules are based on the mean entropy values that are shown in
Table 3 for each transient. In the second step, an idea from graph theory is used to come up with a new way to protect zones. This method divides a transmission system into different zones to make fault condition protection easier and more effective.
Figure 17a,b show the Voltage signal during reactor Charging and Extracted features, respectively.
6.5. Ferranti Effect
We must avoid the Ferranti effect when the load is relatively light or when the line is being energized. Transients can be caused by the switching of line reactors through de-energization and energization. These transients have the same appearance as transients caused by HIF syndrome. In this scenario, the switching operation of a three-phase line reactor with a 50 MVA rating is carried out, and then it is immediately followed by a faulty issue such as CCF-HIF to evaluate the discrimination capabilities of the presented topology while HIF syndrome is present. The transients that were created at LDCs by HIF syndrome. In this situation, the performance of the suggested fault identification technique was evaluated since the voltage, voltage, and temperature were all stable. In this case, also same extracted feature is the same which is shown in
Figure 18.
6.6. Comparative Assessment
Several methods for locating cross-country HIF have previously been covered in
Section 1. Other approaches found in the literature have been compared to the suggested method. The authors have taken into account scenarios of transient switching at various sampling frequencies together with various loading circumstances in the suggested technique (balanced and unbalanced). Using a real-time simulator, the performance of the suggested technique under dispersed generation and power electronic interfaced non-linear loads has been investigated.
For the suggested approach to identify cross-country HIF syndrome, a three-phase voltage signal is needed at any one monitored location. The suggested feature-extraction technique is very effective and simple for detecting this type of fault. It has a significant advantage in the detection of cross-country HIF syndrome in both quiet and noisy conditions. Additionally, TQWT-based techniques reduce the impact of uncorrelated random noise that is present in the signal, removing the need for extra caution to eliminate the impact of noise in the recorded signal. The TQWT-based method can identify HIF under a specific sampling frequency. Unbalanced load switching, dispersed generation, and power electronic interfaced non-linear loads. It is also highly effective at separating HIF from other transient conditions. Some alternative approaches are described in
Table 4.


 ,
, 


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}