
New Fixed Point Results in Orthogonal B-Metric Spaces with Related Applications
 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Preliminaries
- (i)
- iff ;
- (ii)
- ;
- (iii)
- .
- 1.
- is an orthogonal sequence in that converges at a point ι if
- 2.
- are two orthogonal sequences in that are said to be an orthogonal Cauchy sequence if
3. Main Results
- (i)
- χ is orthogonal preserving;
- (ii)
- for any , with , where
- (iii)
- χ is orthogonal continuous;
- (iv)
- is orthogonal continuous with and , for any
- (i)
- χ is orthogonal preserving;
- (ii)
- for any , with , where
- (iii)
- χ is orthogonal continuous;
- (iv)
- is orthogonal continuous with and for any
4. Applications
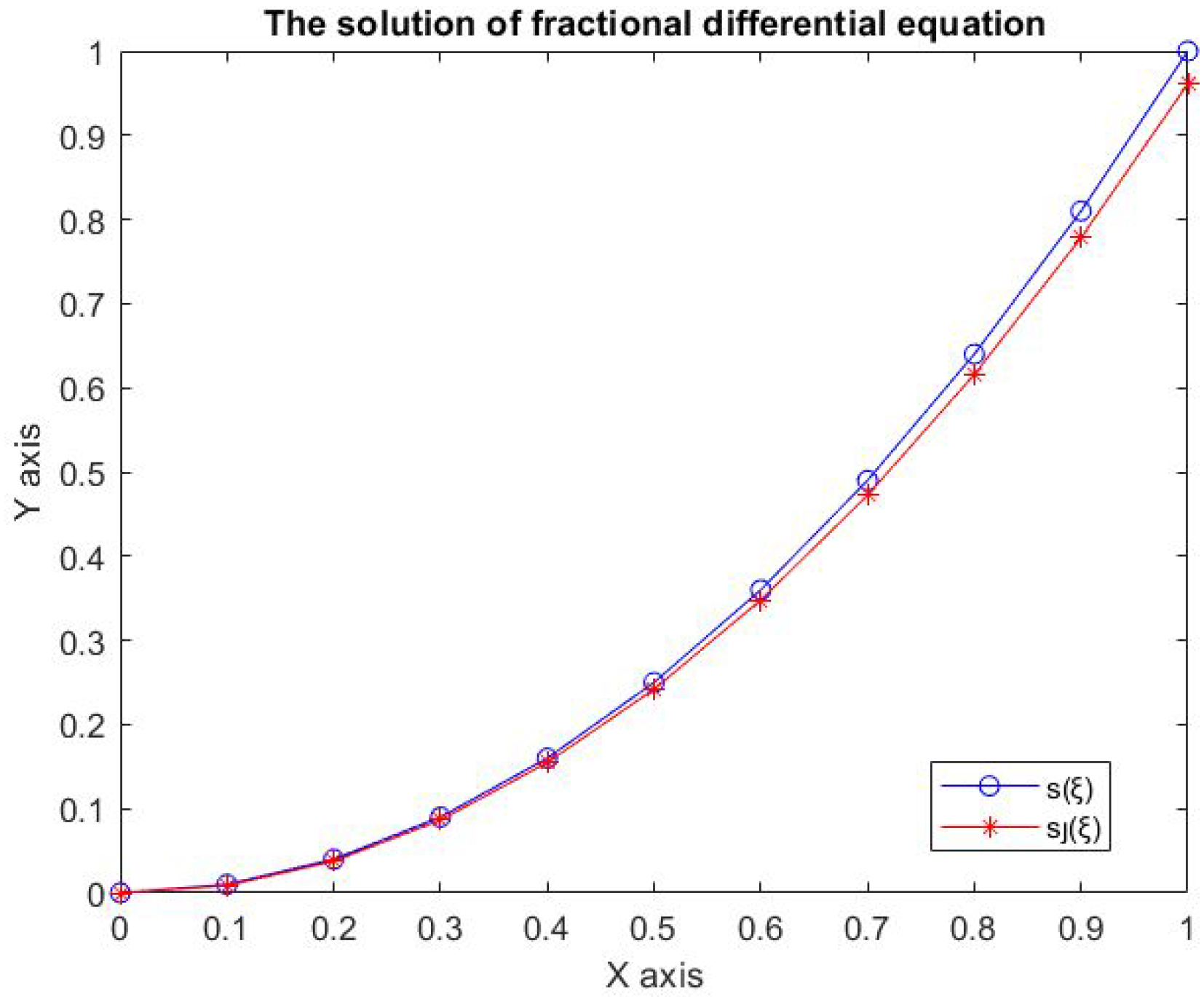
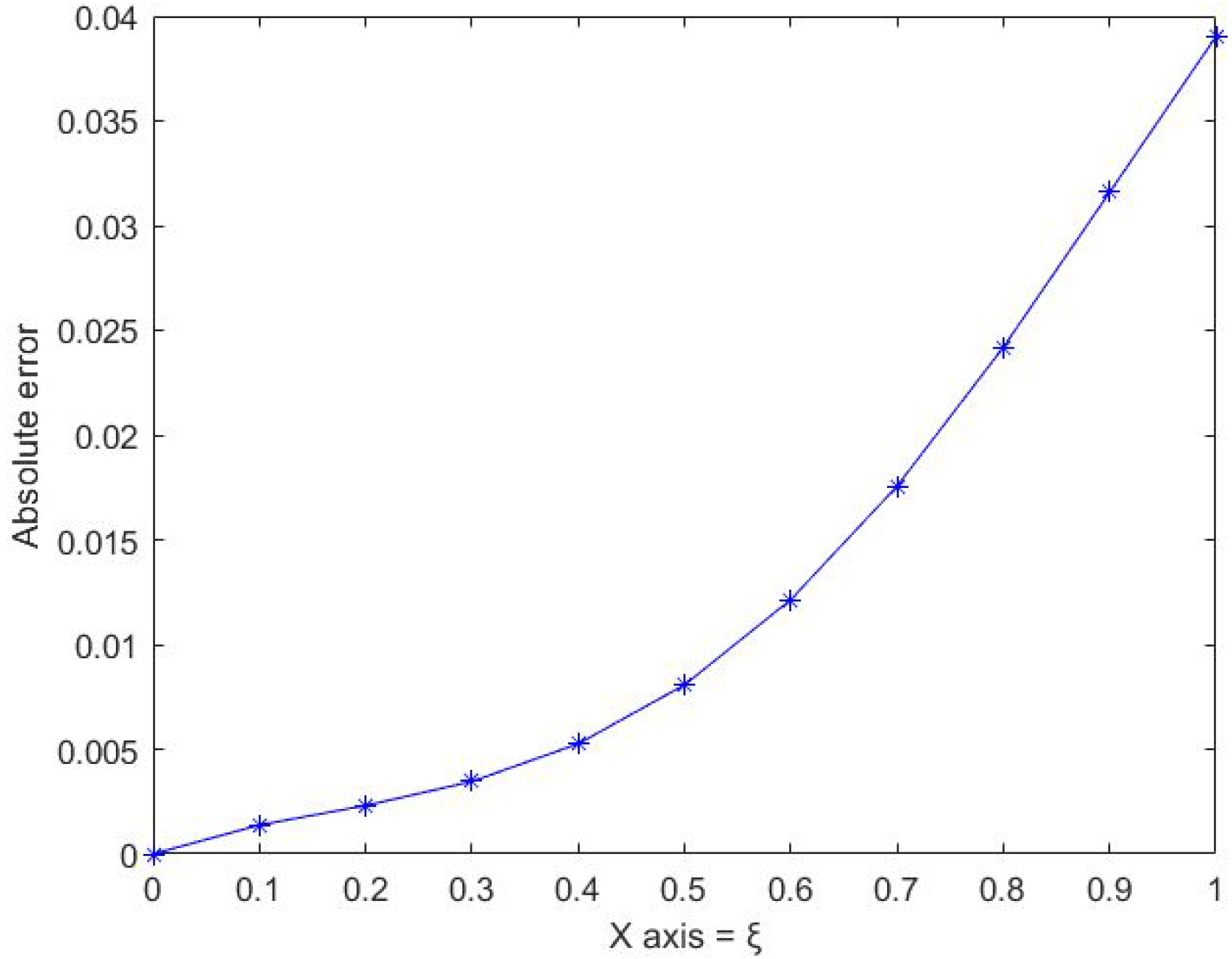
4.1. Fractional Differential Equations
- 1.
- , and s.t
- 2.
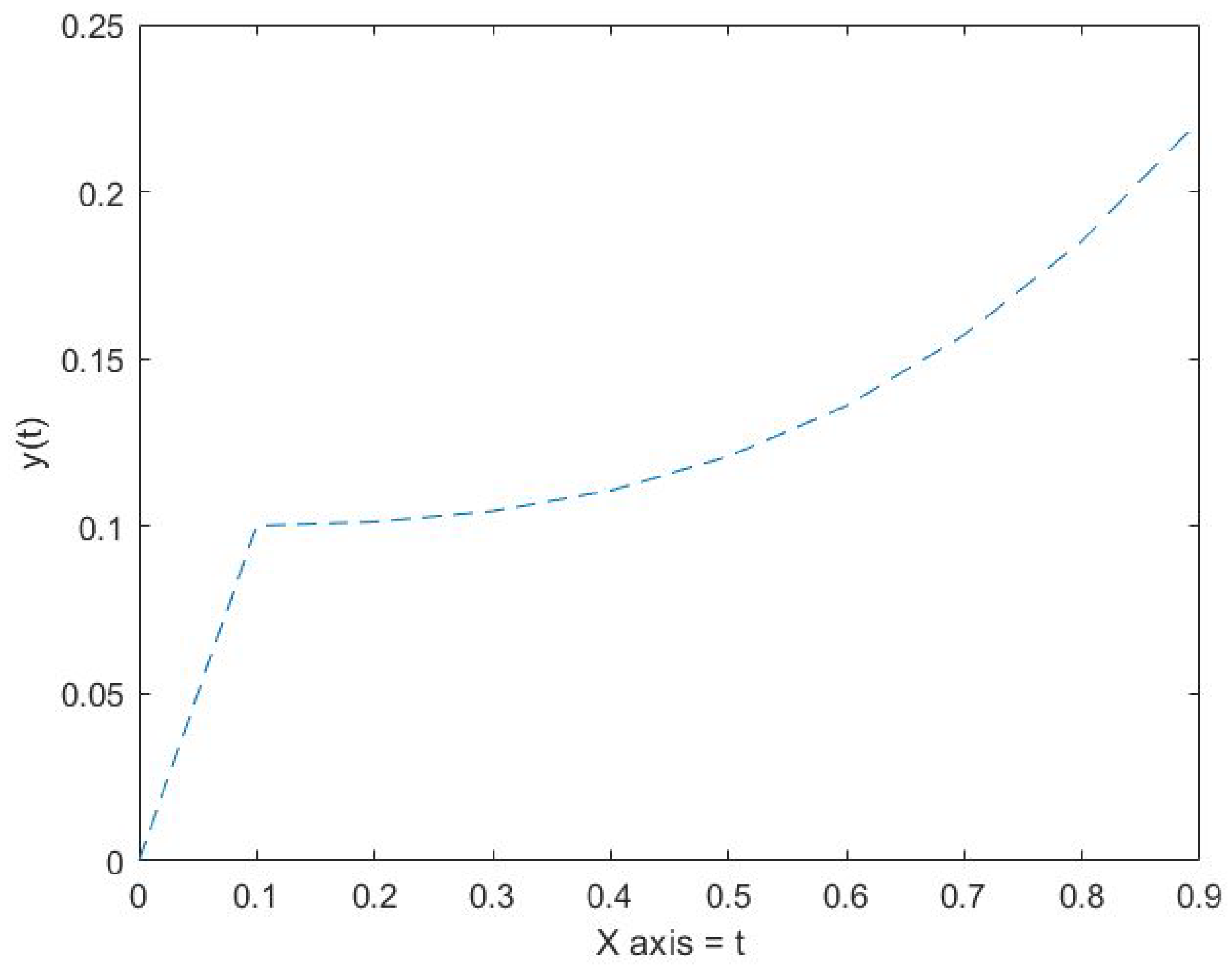
4.2. Application of Elzaki Transformation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| t | |
|---|---|
| 1 | |
| t | |
References
- Banach, S. Sur les operations dans les ensembles abstraits et leurs applications aux equations integrales. Fundam. Math. 1992, 3, 133–181. [Google Scholar] [CrossRef]
- Shatanawi, W. On w-compatible mappings and common coupled coincidence point in cone metric spaces. Appl. Math. Lett. 2012, 25, 925–931. [Google Scholar] [CrossRef] [Green Version]
- Shatanawi, W.; Rajic, R.V.; Radenovic, S.; Al-Rawashhdeh, A. Mizoguchi-Takahashi-type theorems in tvs-cone metric spaces. Fixed Point Theory Appl. 2012, 11, 106. [Google Scholar] [CrossRef] [Green Version]
- Al-Rawashdeh, A.; Hassen, A.; Abdelbasset, F.; Sehmim, S.; Shatanawi, W. On common fixed points for α-F-contractions and applications. J. Nonlinear Sci. Appl. 2016, 9, 3445–3458. [Google Scholar] [CrossRef] [Green Version]
- Shatanawi, W.; Mustafa, Z.; Tahat, N. Some coincidence point theorems for nonlinear contraction in ordered metric spaces. Fixed Point Theory Appl. 2011, 2011, 68. [Google Scholar] [CrossRef] [Green Version]
- Shatanawi, W. Some fixed point results for a generalized Ψ-weak contraction mappings in orbitally metric spaces. Chaos Solitons Fractals 2012, 45, 520–526. [Google Scholar] [CrossRef]
- Istrătescu, V. Some fixed point theorems for convex contraction mappings and mappings with convex diminishing diameters (I). Ann. Mat. Pura Appl. 1982, 130, 89–104. [Google Scholar]
- Istrătescu, V. Some fixed point theorems for convex contraction mappings and mappings with convex diminishing diameters (II). Ann. Mat. Pura Appl. 1983, 134, 327–362. [Google Scholar]
- Berinde, V. Approximating fixed points of weak contractions using the Picard iteration. Nonlinear Anal. Forum 2004, 9, 43–53. [Google Scholar]
- Bakhtin, I.A. The contraction mapping principle in quasimetric spaces. J. Funct. Anal. 1989, 30, 26–37. [Google Scholar]
- Czerwik, S. Nonlinear set-valued contraction mappings in b-metric spaces. Atti Del Semin. Mat. Fis. Dell’Universita Modena 1998, 46, 263–276. [Google Scholar]
- Hussain, N.; Doric, D.; Kadelburg, Z.; Radenovi´c, S. Suzuki-type fixed point results in metric type spaces. J. Inequalities Appl. 2014, 2014, 229. [Google Scholar] [CrossRef] [Green Version]
- Latif, A.; Al Subaie, R.F.; Alansari, M.O. Fixed points of generalized multi-valued contractive mappings in metric type spaces. J. Nonlinear Var. Anal. 2022, 6, 123–138. [Google Scholar]
- Haghi, R.H.; Bakhshi, N. Some coupled fixed point results without mixed monotone property. J. Adv. Math. Stud. 2022, 15, 456–463. [Google Scholar]
- Yao, Y.; Shahzad, N.; Yao, J.C. Convergence of Tseng-type self-adaptive al-gorithms for variational inequalities and fixed point problems. Carpathian J. Math. 2021, 37, 541–550. [Google Scholar] [CrossRef]
- Gordji, M.E.; Habibi, H. Fixed point theory in generalized orthogonal metric space. J. Linear Topol. Algebra 2017, 6, 251–260. [Google Scholar]
- Aiman, M.; Arul Joseph, G.; Absar, U.H.; Senthil Kumar, P.; Gunaseelan, M.; Imran, A.B. Solving an Integral Equation via Orthogonal Brianciari Metric Spaces. J. Funct. Spaces 2022, 2022, 7251823. [Google Scholar]
- Gnanaprakasam, A.J.; Mani, G.; Lee, J.R.; Park, C. Solving a nonlinear integral equation via orthogonal metric space. AIMS Math. 2022, 7, 1198–1210. [Google Scholar] [CrossRef]
- Mani, G.; Gnanaprakasam, A.J.; Kausar, N.; Munir, M. Orthogonal F-Contraction mapping on O-Complete Metric Space with Applications. Int. J. Fuzzy Log. Intell. Syst. 2021, 21, 243–250. [Google Scholar] [CrossRef]
- Arul Joseph, G.; Gunaseelan, M.; Vahid, P.; Hassen, A. Solving a Nonlinear Fredholm Integral Equation via an Orthogonal Metric. Adv. Math. Phys. 2021, 2021, 8. [Google Scholar]
- Prakasam, S.K.; Gnanaprakasam, A.J.; Kausar, N.; Mani, G.; Munir, M. Solution of Integral Equation via Orthogonally Modified F-Contraction Mappings on O-Complete Metric-Like Space. Int. J. Fuzzy Log. Intell. Syst. 2022, 22, 287–295. [Google Scholar] [CrossRef]
- Senthil Kumar, P.; Arul Joseph, G.; Ege, O.; Gunaseelan, M.; Haque, S.; Mlaiki, N. Fixed point for an 𝕆g𝔗-c in 𝕆-complete b-metric-like spaces. AIMS Math. 2022, 8, 1022–1039. [Google Scholar]
- Gnanaprakasam, A.J.; Nallaselli, G.; Haq, A.U.; Mani, G.; Baloch, I.A.; Nonlaopon, K. Common Fixed-Points Technique for the Existence of a Solution to Fractional Integro-Differential Equations via Orthogonal Branciari Metric Spaces. Symmetry 2022, 14, 1859. [Google Scholar] [CrossRef]
- Mani, G.; Prakasam, S.K.; Gnanaprakasam, A.J.; Ramaswamy, R.; Abdelnaby, O.A.A.; Khan, K.H.; Radenović, S. Common Fixed Point Theorems on Orthogonal Branciari Metric Spaces with an Application. Symmetry 2022, 14, 2420. [Google Scholar] [CrossRef]
- Miculescu, R.; Mihail, A. New fixed point theorems for set-valued contractions in b-metric spaces. J. Fixed Point Theory Appl. 2017, 19, 2153–2163. [Google Scholar] [CrossRef]
- Popescu, O. Some new fixed point theorems for a α Geraghty-contraction type maps in metric spaces. Fixed Point Theory Appl. 2014, 2014, 190. [Google Scholar] [CrossRef]
- Gordji, M.E.; Ramezani, M.; De La Sen, M.; Cho, Y.J. On orthogonal sets and Banach fixed point theorem. Fixed Point Theory 2017, 18, 569–578. [Google Scholar] [CrossRef]
- Ramezani, M. Orthogonal metric space and convex contractions. Int. J. Nonlinear Anal. Appl. 2015, 6, 127–132. [Google Scholar]
- Karapinar, E.; Fulga, A.; Petrusel, A. On Istrtescu Type contraction in b-Metric Space. Mathematics 2020, 8, 388. [Google Scholar] [CrossRef] [Green Version]



| 0.00000 | 0.00000 | 0.00000 | 0.00000 |
| 0.10000 | 0.01000 | 0.00862 | 0.00138 |
| 0.20000 | 0.04000 | 0.03769 | 0.00231 |
| 0.30000 | 0.09000 | 0.08654 | 0.00346 |
| 0.40000 | 0.16000 | 0.15474 | 0.00526 |
| 0.50000 | 0.25000 | 0.24193 | 0.00807 |
| 0.60000 | 0.36000 | 0.34786 | 0.01214 |
| 0.70000 | 0.49000 | 0.47244 | 0.01756 |
| 0.80000 | 0.64000 | 0.61581 | 0.02419 |
| 0.90000 | 0.81000 | 0.77841 | 0.03159 |
| 1.00000 | 1.00000 | 0.96098 | 0.03902 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gnanaprakasam, A.J.; Mani, G.; Ege, O.; Aloqaily, A.; Mlaiki, N. New Fixed Point Results in Orthogonal B-Metric Spaces with Related Applications. Mathematics 2023, 11, 677. https://doi.org/10.3390/math11030677
Gnanaprakasam AJ, Mani G, Ege O, Aloqaily A, Mlaiki N. New Fixed Point Results in Orthogonal B-Metric Spaces with Related Applications. Mathematics. 2023; 11(3):677. https://doi.org/10.3390/math11030677
Chicago/Turabian StyleGnanaprakasam, Arul Joseph, Gunaseelan Mani, Ozgur Ege, Ahmad Aloqaily, and Nabil Mlaiki. 2023. "New Fixed Point Results in Orthogonal B-Metric Spaces with Related Applications" Mathematics 11, no. 3: 677. https://doi.org/10.3390/math11030677
APA StyleGnanaprakasam, A. J., Mani, G., Ege, O., Aloqaily, A., & Mlaiki, N. (2023). New Fixed Point Results in Orthogonal B-Metric Spaces with Related Applications. Mathematics, 11(3), 677. https://doi.org/10.3390/math11030677