

EJS: Multi-Strategy Enhanced Jellyfish Search Algorithm for Engineering Applications




Abstract
:1. Introduction
2. Overview of the Basic Jellyfish Search Algorithm
2.1. Population Initialization
2.2. Jellyfish Follow the Ocean Current
2.3. Jellyfish Move within a Swarm
- (1)
- Type A movement:
- (2)
- Type B movement:
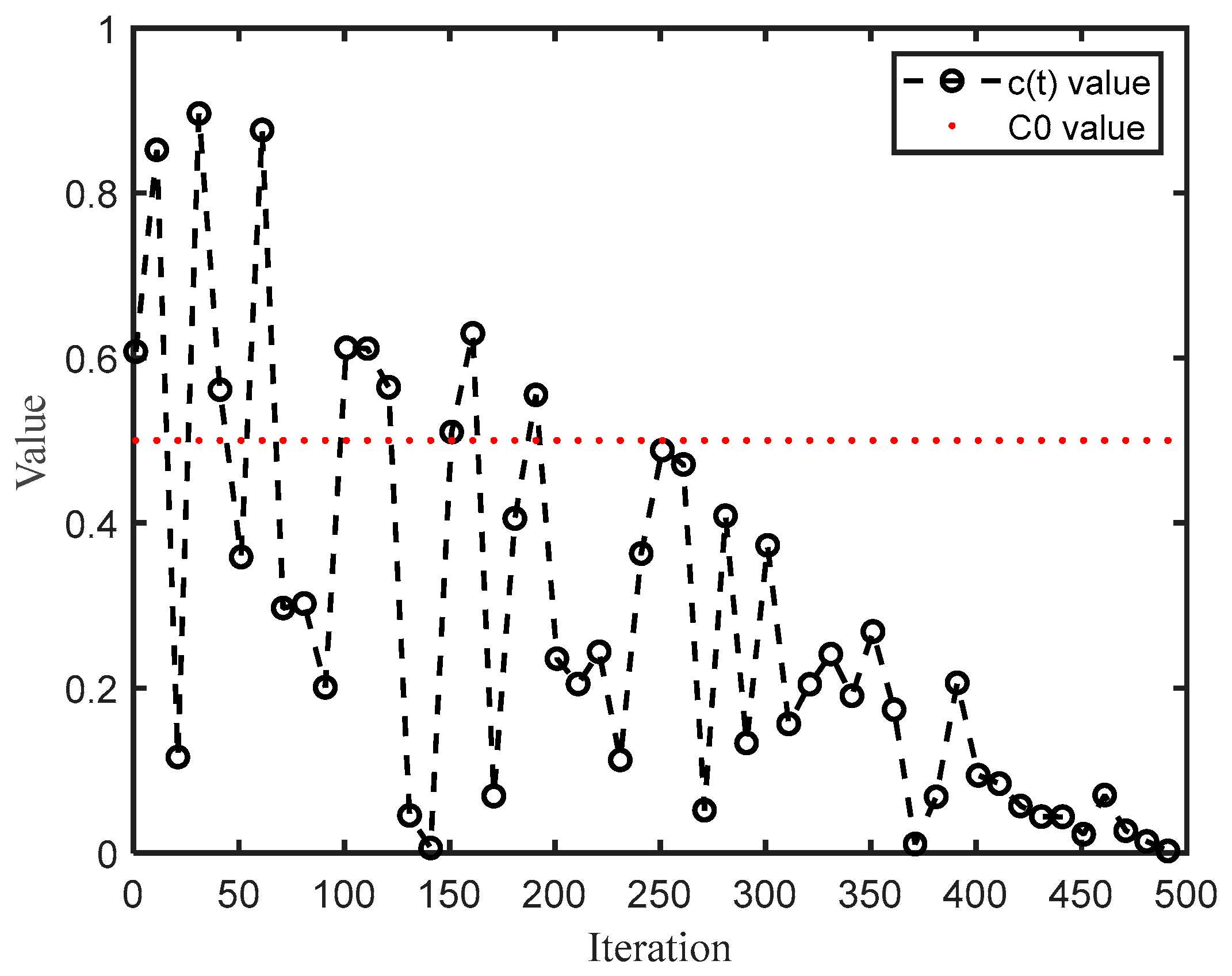
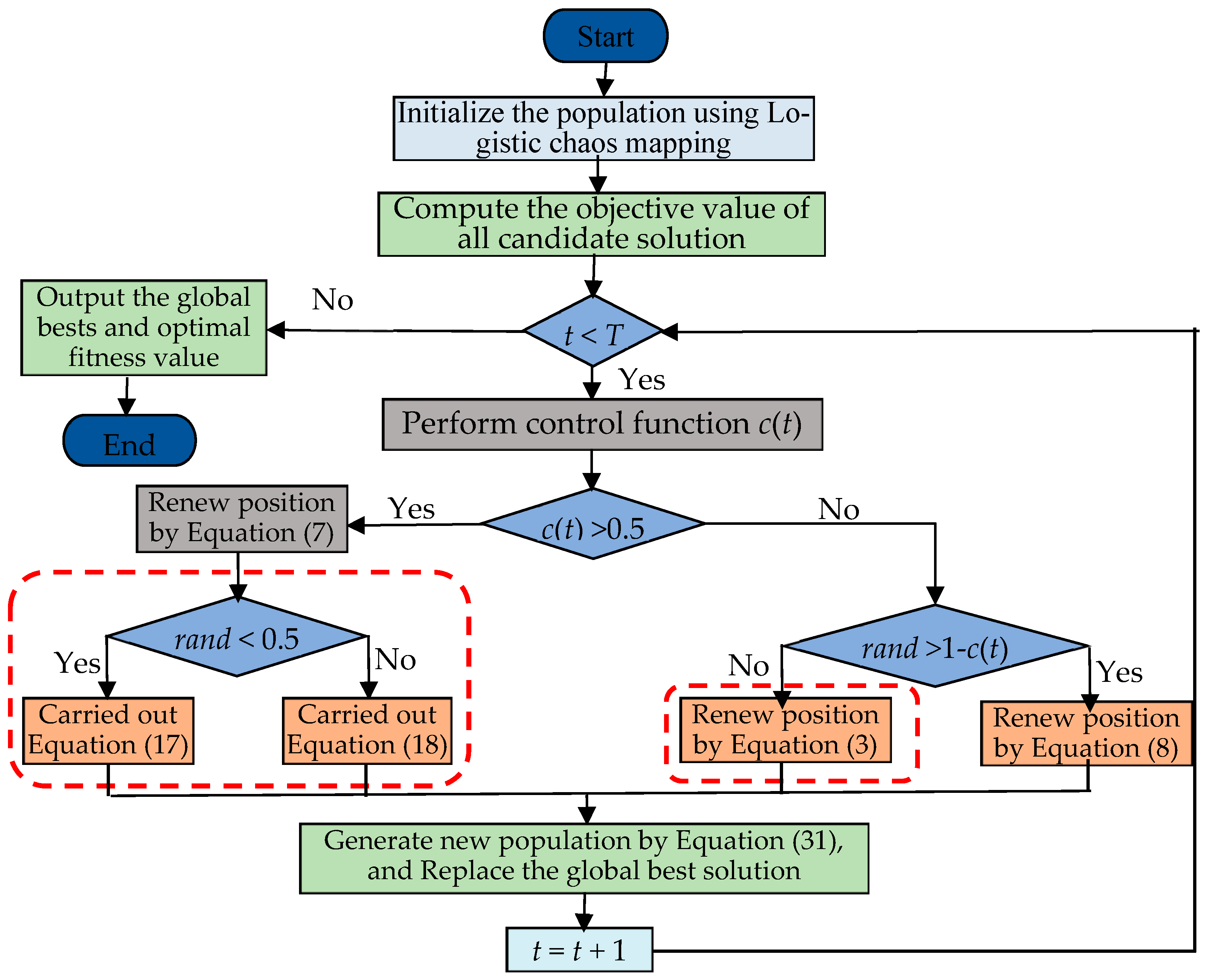
2.4. Time Control Mechanism
2.5. Boundary Conditions
2.6. Steps of the Jellyfish Search Algorithm
| Algorithm 1: JS algorithm |
| Begin Step 1: Initialization. Define the objective function, set N and T, initialize population of jellyfish using Logistic map according to Equation (1), and set . Step 2: Objective calculation. Calculate quantity of food at each candidate location, and pick up the optimal location of candidate. Step 3: While t < T do for i = 1 to N do Implement c(t) with Equation (12) if then Update location with Equation (7) else if rand(0, 1) > 1 − C(t) then Update location with Equation (8) else Update location with Equation (9) end if end if Check whether the boundary is out of bounds and and replace the optimal position. end for end while Step 4: Return. Return the global best position and corresponding optimal objective cost fitness value. End |
3. Enhanced Jellyfish Search Algorithm
3.1. Sine and Cosine Learning Factors
3.2. Local Escape Operator
3.3. Learning Strategy
3.4. Steps of Enhanced Jellyfish Search Algorithm
3.5. Time Complexity of the EJS Algorithm
| Algorithm 2: EJS algorithm |
| Begin Step 1: Initialization. Define the fitness function, set N and T, initialize with Logistic map for , and set . Step 2: Fitness calculation. Calculate quantity of food at each jellyfish position , and pick up the best position Step 3: While t < T do for I = 1 to N do if do //Local escaping operator(LEO) if rand < 0.5 else Pi(t + 1) = PLEO(t) end else if Do //Type A else //Type B //Sine and cosine learning factors end if end if //Learning strategy Check whether the boundary is out of bounds. If it out of search region, and replace the location; end for end while Step 4: Return. Return the global optimal solution. End |
4. Numerical Experiment and Result Analysis Based on a Benchmark Test Set
4.1. Performance Indicators
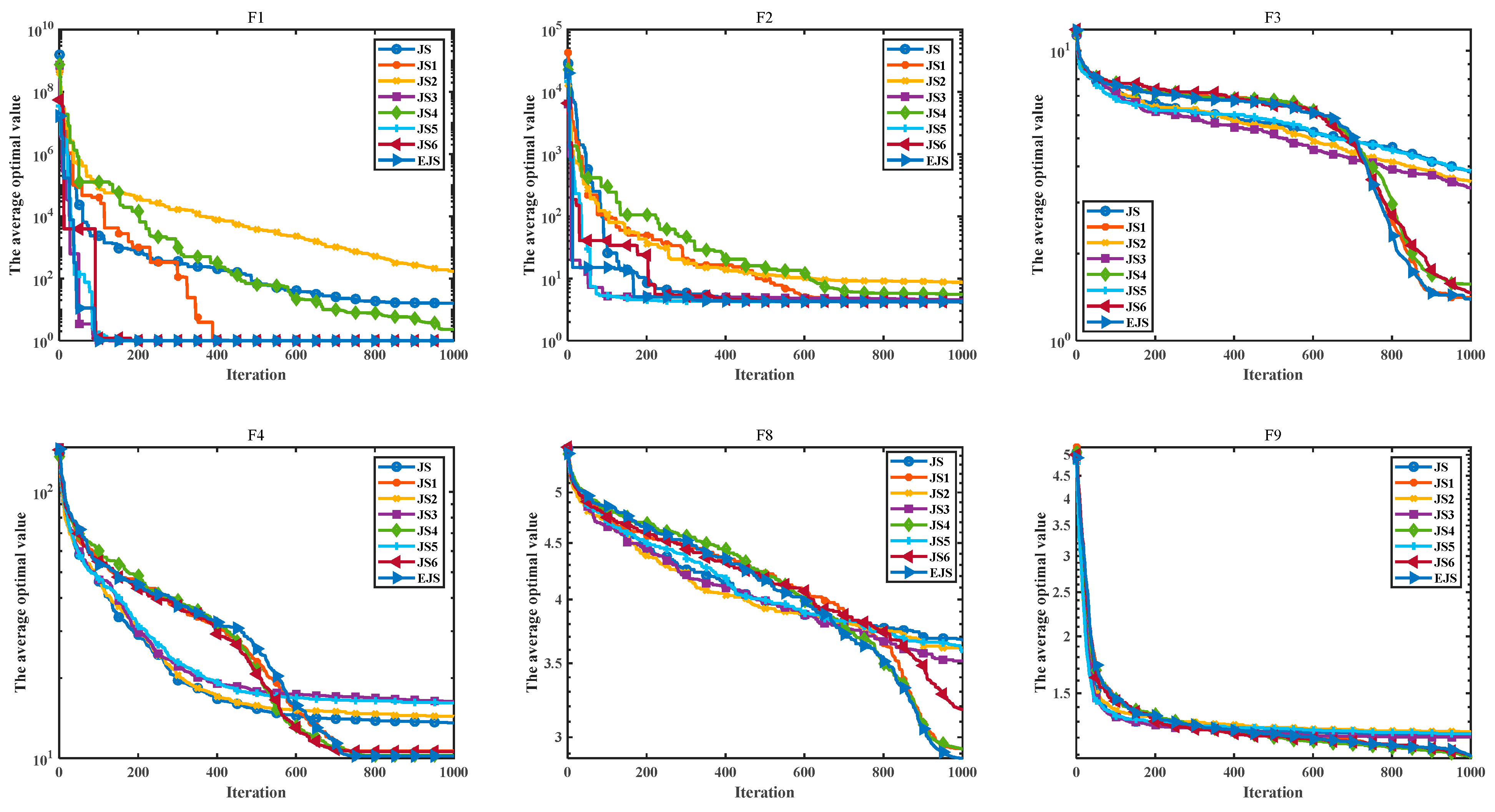
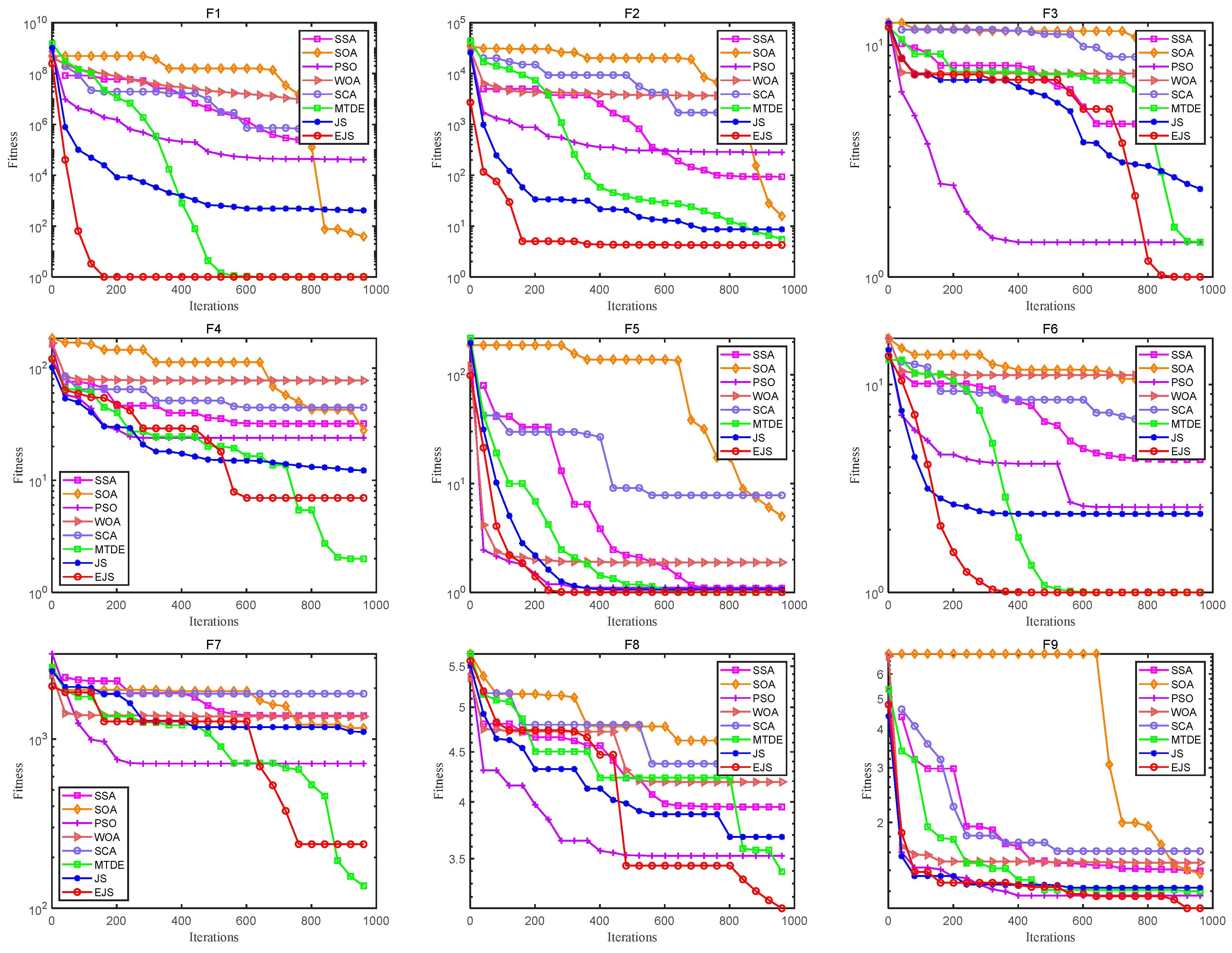
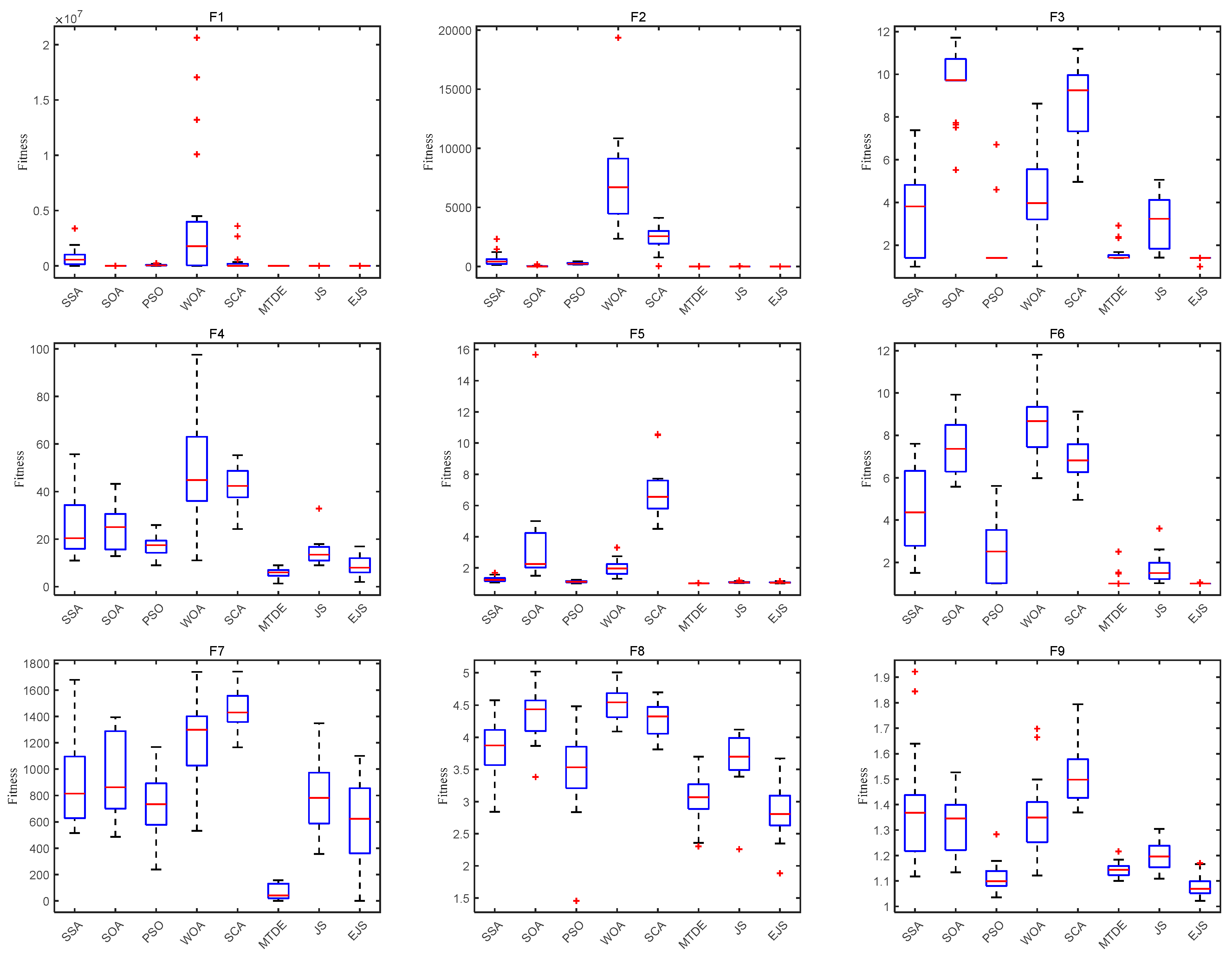
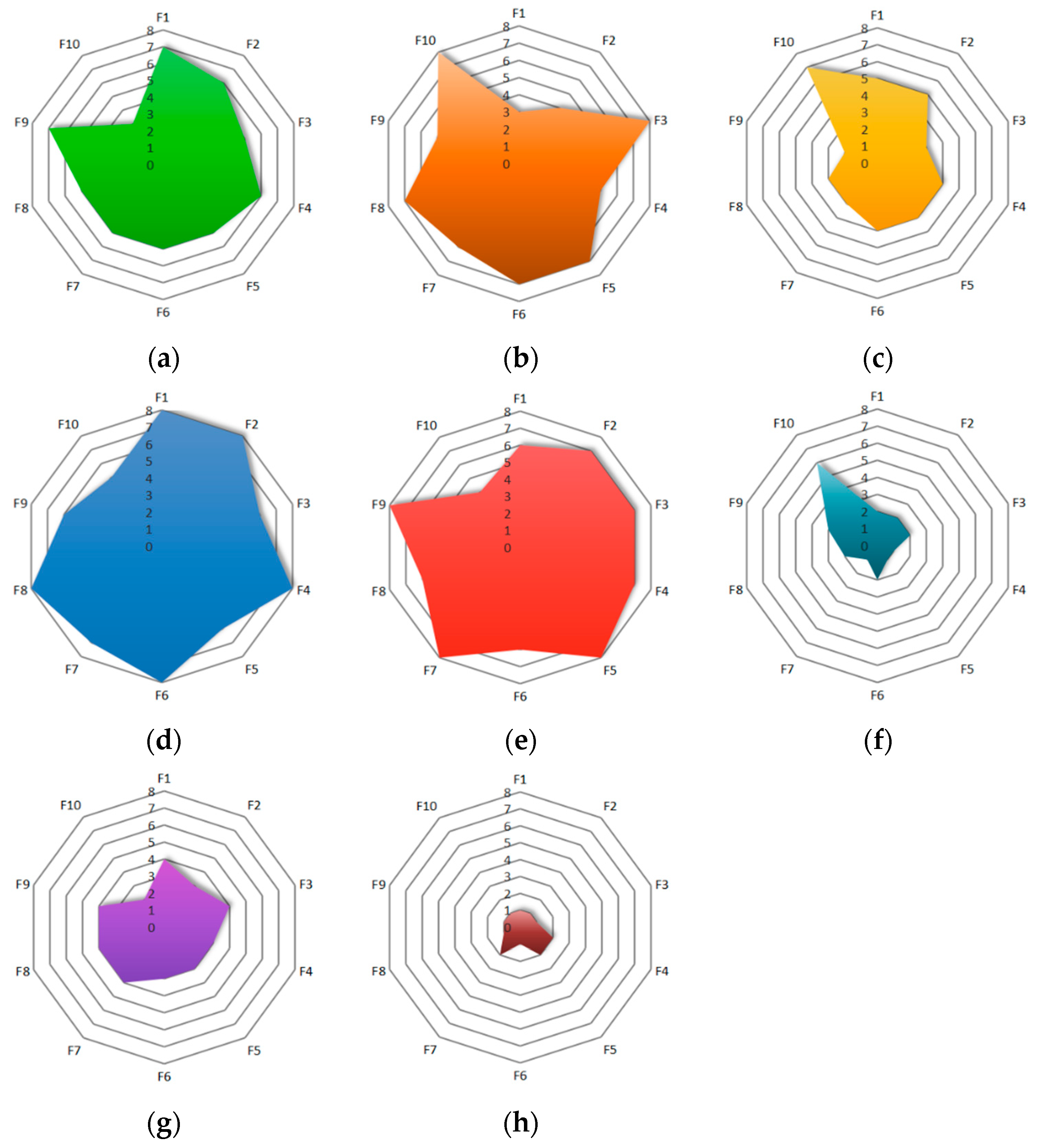
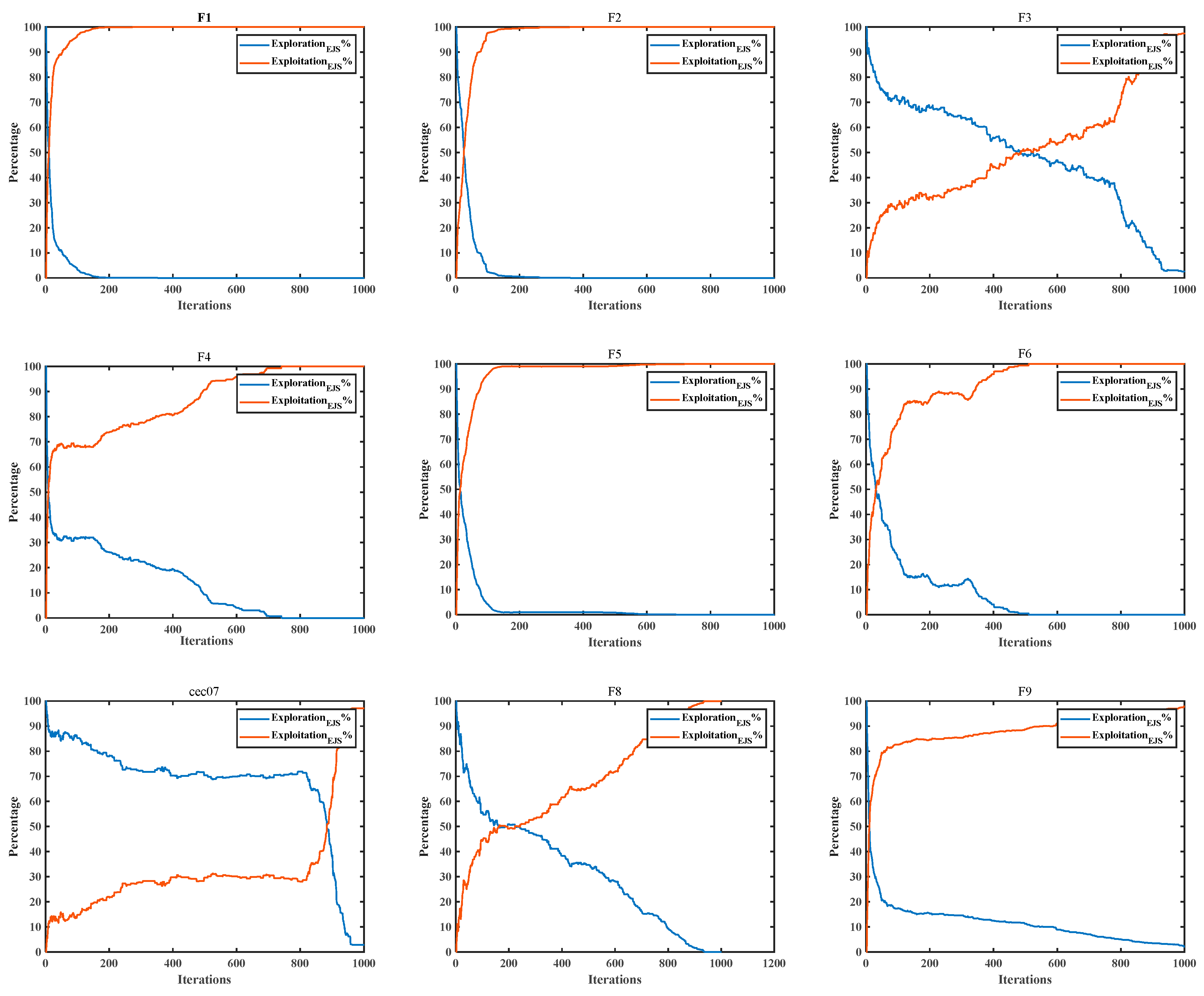
4.2. Comparison between the EJS Algorithm and Other Optimization Algorithms
5. Engineering Application
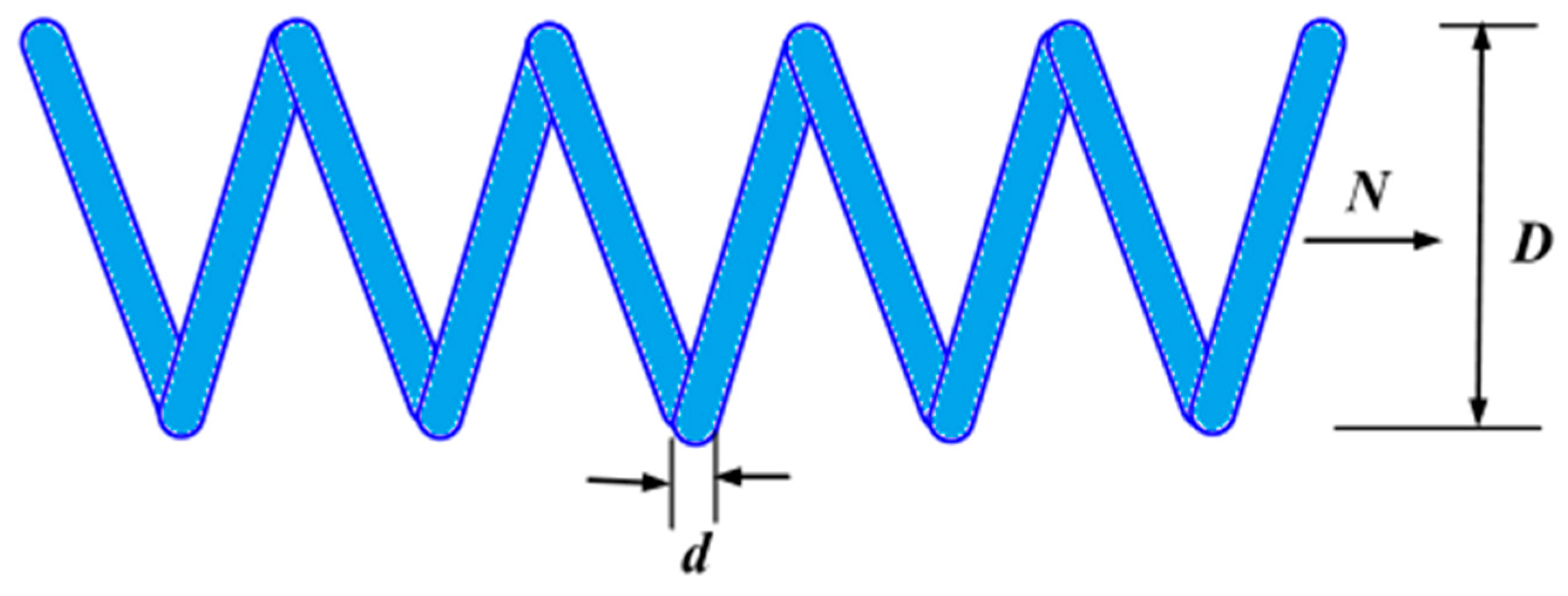
5.1. Tension/Compression Spring Design Problem
5.2. Pressure Vessels Design Problem
5.3. Gear Train Design Problem
5.4. Cantilever Beam Design Problem
5.5. Planar Three-Bar Truss Design Problem
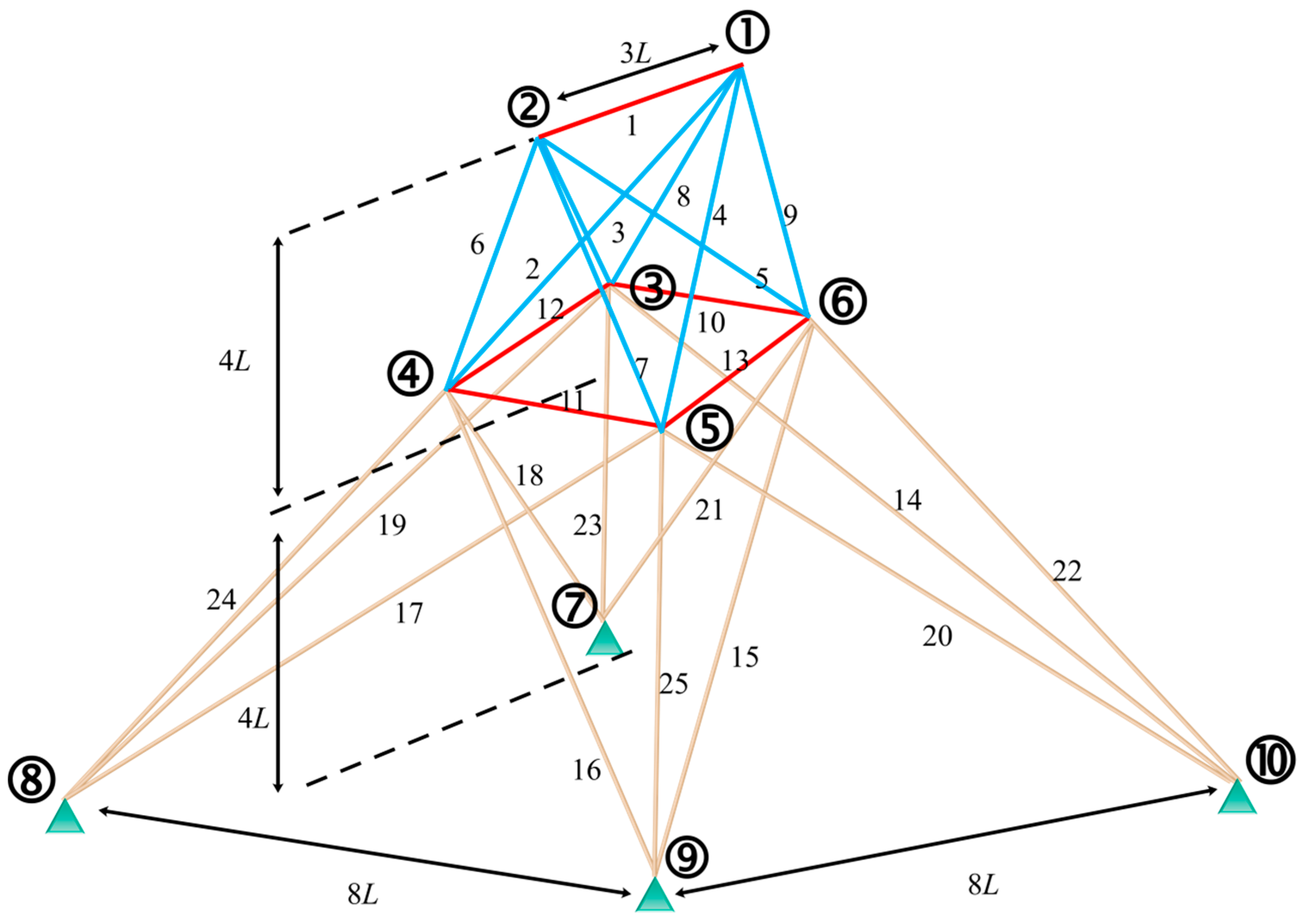
5.6. Spatial 25-Bar Truss Design Problem
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, G.; Du, B.; Wang, X.; Wei, G. An enhanced black widow optimization algorithm for feature selection. Knowl.-Based Syst. 2022, 235, 107638. [Google Scholar] [CrossRef]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Fausto, F.; Reyna-Orta, A.; Cuevas, E.; Andrade, Á.G.; Perez-Cisneros, M. From ants to whales: Metaheuristics for all tastes. Artif. Intell. Rev. 2020, 53, 753–810. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Erol, O.K.; Eksin, I. A new optimization method: Big Bang–Big Crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Abualigah, L. Multi-verse optimizer algorithm: A comprehensive survey of its results, variants, and applications. Neural Comput. Appl. 2020, 32, 12381–12401. [Google Scholar] [CrossRef]
- Mostafa, R.R.; El-Attar, N.E.; Sabbeh, S.F.; Ankit, V.; Fatma, A.H. ST-AL: A hybridized search based metaheuristic computational algorithm towards optimization of high dimensional industrial datasets. Soft Comput. 2022, 1–29. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Dorigo, M.; Di Caro, G. Ant colony optimization: A new meta-heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation, Washington, DC, USA, 6–9 July 1999; pp. 1470–1477. [Google Scholar]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Ashraf, N.N.; Mostafa, R.R.; Sakr, R.H.; Rashad, M.Z. Optimizing hyperparameters of deep reinforcement learning for autonomous driving based on whale optimization algorithm. PLoS ONE 2021, 16, e0252754. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimization algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H.L. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Sulaiman, M.H.; Mustaffa, Z.; Saari, M.M.; Daniyal, H. Barnacles mating optimizer: A new bio-inspired algorithm for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 87, 103330. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl.-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Chou, J.-S.; Truong, D.N. A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean. Appl. Math. Comput. 2021, 389, 125535. [Google Scholar] [CrossRef]
- Elkabbash, E.T.; Mostafa, R.R.; Barakat, S.I. Android malware classification based on random vector functional link and artificial Jellyfish Search optimizer. PLoS ONE 2011, 16, e0260232. [Google Scholar] [CrossRef]
- Hu, G.; Dou, W.; Wang, X.; Abbas, M. An enhanced chimp optimization algorithm for optimal degree reduction of Said-ball curves. Math. Compu. Simulat. 2022, 197, 207–252. [Google Scholar] [CrossRef]
- Hu, G.; Li, M.; Wang, X.F.; Guo, W.; Ching-Ter, C. An enhanced manta ray foraging optimization algorithm for shape optimization of complex CCG-Ball curves. Knowl.-Based Syst. 2022, 240, 108071. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Abualigah, L.; Ewees, A.A.; Al-qaness, M.A.; Mostafa, R.R.; Yousri, D.; Ibrahim, R.A. Triangular mutation-based manta-ray foraging optimization and orthogonal learning for global optimization and engineering problems. Appl. Intell. 2022, 2022, 1–30. [Google Scholar] [CrossRef]
- Hu, G.; Zhong, J.; Du, B.; Wei, G. An enhanced hybrid arithmetic optimization algorithm for engineering applications. Comput. Methods Appl. Mech. Eng. 2022, 394, 114901. [Google Scholar] [CrossRef]
- Chaabane, S.B.; Kharbech, S.; Belazi, A.; Bouallegue, A. Improved Whale optimization Algorithm for SVM Model Selection: Application in Medical Diagnosis. In Proceedings of the 2020 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Ben Chaabane, S.; Belazi, A.; Kharbech, S.; Bouallegue, A.; Clavier, L. Improved Salp Swarm Optimization Algorithm: Application in Feature Weighting for Blind Modulation Identification. Electronics 2021, 10, 2002. [Google Scholar] [CrossRef]
- Mostafa, R.R.; Ewees, A.A.; Ghoniem, R.M.; Abualigah, L.; Hashim, F.A. Boosting chameleon swarm algorithm with consumption AEO operator for global optimization and feature selection. Knowl.-Based Syst. 2022, 21, 246. [Google Scholar] [CrossRef]
- Adnan, R.M.; Dai, H.L.; Mostafa, R.R.; Parmar, K.S.; Heddam, S.; Kisi, O. Modeling Multistep Ahead Dissolved Oxygen Concentration Using Improved Support Vector Machines by a Hybrid Metaheuristic Algorithm. Sustainability 2022, 14, 3470. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput.-Aided Des. 2011, 42, 303–315. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 2, 60–68. [Google Scholar] [CrossRef]
- Liu, Z.Z.; Chu, D.H.; Song, C.; Xue, X.; Lu, B.Y. Social learning optimization (SLO) algorithm paradigm and its application in QoS-aware cloud service composition. Inf. Sci. 2016, 326, 315–333. [Google Scholar] [CrossRef]
- Satapathy, S.; Naik, A. Social group optimization (SGO): A new population evolutionary optimization technique. Complex Intell. Syst. 2016, 2, 173–203. [Google Scholar] [CrossRef]
- Kumar, M.; Kulkarni, A.J.; Satapathy, S.C. Socio evolution & learning optimization algorithm: A socio-inspired optimization methodology. Future Gener. Comput. Syst. 2018, 81, 252–272. [Google Scholar]
- Gouda, E.A.; Kotb, M.F.; El-Fergany, A.A. Jellyfish search algorithm for extracting unknown parameters of PEM fuel cell models: Steady-state performance and analysis. Energy 2021, 221, 119836. [Google Scholar] [CrossRef]
- Youssef, H.; Hassan, M.H.; Kamel, S.; Elsayed, S.K. Parameter estimation of single phase transformer using jellyfish search optimizer algorithm. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Online, 22–26 March 2021; pp. 1–4. [Google Scholar]
- Shaheen, A.M.; Elsayed, A.M.; Ginidi, A.R.; Elattar, E.E.; El-Sehiemy, R.A. Effective automation of distribution systems with joint integration of DGs/ SVCs considering reconfiguration capability by jellyfish search algorithm. IEEE Access 2021, 9, 92053–92069. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Alharthi, M.M.; Ghoneim, S.S.; Ginidi, A.R. Multi-objective jellyfish search optimizer for efficient power system operation based on multi-dimensional OPF framework. Energy 2021, 237, 121478. [Google Scholar] [CrossRef]
- Barshandeh, S.; Dana, R.; Eskandarian, P. A learning automata-based hybrid MPA and JS algorithm for numerical optimization problems and its application on data clustering. Knowl.-Based Syst. 2021, 236, 107682. [Google Scholar] [CrossRef]
- Manita, G.; Zermani, A. A modified jellyfish search optimizer with orthogonal learning strategy. Procedia Comput. Sci. 2021, 192, 697–708. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Chakrabortty, R.; Ryan, M.; El-Fergany, A. An improved artificial jellyfish search optimizer for parameter identification of photovoltaic models. Energies 2021, 14, 1867. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Abouhawwash, M.; Chakrabortty, R.K.; Ryan, M.J.; Nam, Y. An improved jellyfish algorithm for multilevel thresholding of magnetic resonance brain image segmentations. Comput. Mater. Con. 2021, 68, 2961–2977. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inform. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Vienna, Austria, 28–30 November 2005; pp. 695–701. [Google Scholar]
- Hu, G.; Zhu, X.N.; Wei, G.; Chang, C.T. An improved marine predators algorithm for shape optimization of developable Ball surfaces. Eng. Appl. Artif. Intell. 2021, 105, 104417. [Google Scholar] [CrossRef]
- Brest, J.; Maučec, M.S.; Bošković, B. The 100-digit challenge: Algorithm jde100. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation, CEC, Wellington, New Zealand, 10–13 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 19–26. [Google Scholar]
- Hu, G.; Yang, R.; Qin, X.Q.; Wei, G. MCSA: Multi-strategy boosted chameleon-inspired optimization algorithm for engineering applications. Comput. Methods Appl. Mech. Eng. 2023, 403, 115676. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S.; Faris, H. MTDE: An effective multi-trial vector-based differential evolution algorithm and its applications for engineering design problems. Appl. Soft Comput. 2020, 97, 106761. [Google Scholar] [CrossRef]
- Hussain, K.; Salleh, M.N.M.; Cheng, S.; Shi, Y. On the exploration and exploitation in popular swarm-based metaheuristic algorithms. Neural Comput. Appl. 2019, 31, 7665–7683. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K.; Mirjalili, S.; Kim, J.H. A modified sine cosine algorithm with novel transition parameter and mutation operator for global optimization. Expert Syst. Appl. 2020, 154, 113395. [Google Scholar] [CrossRef]
- Nematollahi, A.F.; Rahiminejad, A.; Vahidi, B. A novel meta-heuristic optimization method based on golden ratio in nature. Soft Comput. 2020, 24, 1117–1151. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Function Name | Optimal Value | Dim | Search Range |
|---|---|---|---|---|
| F1 | Storn’s Chebyshev Polynomial Fitting Problem | 1 | 9 | [−8192, 8192] |
| F2 | Inverse Hilbert Matrix Problem | 1 | 16 | [−16,384, 16,384] |
| F3 | Lennard-Jones Minimum Energy Cluster | 1 | 18 | [−4, 4] |
| F4 | Rastrigin’s Function | 1 | 10 | [−100, 100] |
| F5 | Griewangk’s Function | 1 | 10 | [−100, 100] |
| F6 | Weierstrass Function | 1 | 10 | [−100, 100] |
| F7 | Modified Schwefel’s Function | 1 | 10 | [−100, 100] |
| F8 | Expanded Schaffer’s F6 Function | 1 | 10 | [−100, 100] |
| F9 | Happy Cat Function | 1 | 10 | [−100, 100] |
| F10 | Ackley Function | 1 | 10 | [−100, 100] |
| No. | Result | Algorithm | |||||||
|---|---|---|---|---|---|---|---|---|---|
| JS | JSI | JSII | JSIII | JSIV | JSV | JSVI | EJS | ||
| F1 | Best | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 | 1.000000 |
| Worst | 107.874719 | 4.518274 | 2005.953718 | 1.000000 | 34.033461 | 1.000000 | 1.000000 | 1.000000 | |
| Mean | 25.353117 | 1.714772 | 730.661957 | 1.000000 | 7.867176 | 1.000000 | 1.000000 | 1.000000 | |
| Std | 4.6579 × 101 | 1.5674 × 100 | 8.7582 × 102 | 8.1288 × 10−8 | 1.4638 × 100 | 4.0521 × 10−9 | 2.2238 × 10−11 | 4.0951 × 10−13 | |
| Rank | 7 | 5 | 8 | 4 | 6 | 3 | 2 | 1 | |
| F2 | Best | 4.246899 | 4.198636 | 4.266541 | 4.186653 | 3.908319 | 4.222719 | 4.096543 | 4.225043 |
| Worst | 26.384846 | 5.010327 | 8.670419 | 4.548559 | 11.681408 | 4.358863 | 4.269076 | 4.274394 | |
| Mean | 9.976218 | 4.455787 | 5.476164 | 4.317989 | 6.827503 | 4.274081 | 4.246312 | 4.265880 | |
| Std | 9.3415 × 100 | 3.2849 × 10−1 | 1.8428 × 100 | 1.2939 × 10−1 | 3.1694 × 100 | 4.8525 × 10−2 | 1.4885 × 10−2 | 5.7127 × 10−3 | |
| Rank | 8 | 5 | 6 | 4 | 7 | 3 | 1 | 2 | |
| F3 | Best | 1.409205 | 1.409135 | 1.423200 | 1.419679 | 1.000000 | 2.133738 | 1.409135 | 1.000001 |
| Worst | 5.9568 | 1.4140 | 5.1663 | 5.1481 | 4.6081 | 5.6611 | 2.2787 | 1.4497 | |
| Mean | 3.829589 | 1.409379 | 3.541565 | 3.371766 | 1.567780 | 3.861664 | 1.462579 | 1.390706 | |
| Std | 1.4241 × 100 | 1.0867 × 10−3 | 1.0588 × 100 | 1.1612 × 100 | 7.2708 × 10−1 | 1.0251 × 100 | 1.9616 × 10−1 | 9.2406 × 10−2 | |
| Rank | 7 | 2 | 6 | 5 | 4 | 8 | 3 | 1 | |
| F4 | Best | 5.974795 | 4.979836 | 7.964708 | 8.959667 | 5.974795 | 7.965020 | 3.984877 | 1.994959 |
| Worst | 19.904187 | 20.899141 | 22.579489 | 24.878957 | 21.894100 | 27.720452 | 19.904187 | 22.889059 | |
| Mean | 13.571367 | 10.651094 | 14.364349 | 16.351025 | 10.253112 | 16.154598 | 10.601347 | 10.203363 | |
| Std | 4.2744 × 100 | 4.5320 × 100 | 4.4084 × 100 | 4.4952 × 100 | 4.1478 × 100 | 4.4344 × 100 | 4.5683 × 100 | 5.2338 × 100 | |
| Rank | 5 | 4 | 6 | 8 | 2 | 7 | 3 | 1 | |
| F5 | Best | 1.000391 | 1.009865 | 1.019678 | 1.003905 | 1.007396 | 1.009858 | 1.007396 | 1.000001 |
| Worst | 1.164923 | 1.256066 | 1.127889 | 1.201756 | 1.130397 | 1.129320 | 1.132895 | 1.120643 | |
| Mean | 1.062980 | 1.067922 | 1.065941 | 1.058357 | 1.064226 | 1.059325 | 1.059564 | 1.002496 | |
| Std | 4.3754 × 10−2 | 5.8209 × 10−2 | 2.8223 × 10−2 | 5.5578 × 10−2 | 3.7415 × 10−2 | 3.0438 × 10−2 | 3.2596 × 10−2 | 3.4416 × 10−2 | |
| Rank | 5 | 8 | 7 | 2 | 6 | 3 | 4 | 1 | |
| F6 | Best | 1.010457 | 1.000000 | 1.008890 | 1.033805 | 1.000000 | 1.030205 | 1.000000 | 1.000000 |
| Worst | 3.125804 | 2.576493 | 3.071817 | 4.085525 | 2.576352 | 4.234450 | 1.008229 | 1.002320 | |
| Mean | 1.799196 | 1.140360 | 1.629071 | 1.900689 | 1.154138 | 2.045131 | 1.000851 | 1.000247 | |
| Std | 6.3932 × 10−1 | 3.9503 × 10−1 | 6.3335 × 10−1 | 1.0009 × 100 | 4.7352 × 10−1 | 8.5399 × 10−1 | 2.3623 × 10−3 | 7.0205 × 10−4 | |
| Rank | 6 | 3 | 5 | 7 | 4 | 8 | 2 | 1 | |
| F7 | Best | 263.387643 | 119.875516 | 475.665511 | 24.567441 | 432.363813 | 165.724634 | 134.682820 | 123.243229 |
| Worst | 1.1952 × 103 | 1.2673 × 103 | 1.3974 × 103 | 1.1286 × 103 | 1.1644 × 103 | 1.3881 × 103 | 1.2171 × 103 | 1.2086 × 103 | |
| Mean | 745.119061 | 615.341713 | 889.860067 | 711.903040 | 757.697432 | 874.636013 | 577.351162 | 702.483287 | |
| Std | 2.3229 × 102 | 3.0147 × 102 | 2.4962 × 102 | 2.8263 × 102 | 2.0552 × 102 | 3.2378 × 102 | 2.5476 × 102 | 2.8796 × 102 | |
| Rank | 5 | 2 | 8 | 4 | 6 | 7 | 1 | 3 | |
| F8 | Best | 3.110874 | 2.197454 | 2.839690 | 2.043254 | 1.758220 | 3.274288 | 2.566743 | 1.717564 |
| Worst | 4.101536 | 3.813682 | 4.261395 | 4.032497 | 3.647034 | 3.938084 | 4.097482 | 3.809025 | |
| Mean | 3.677661 | 2.928565 | 3.614662 | 3.518221 | 2.927741 | 3.586926 | 3.179098 | 2.871277 | |
| Std | 2.4798 × 10−1 | 4.3209 × 10−1 | 4.0743 × 10−1 | 4.2721 × 10−1 | 5.0958 × 10−1 | 1.7740 × 10−1 | 4.2090 × 10−1 | 4.8730 × 10−1 | |
| Rank | 8 | 3 | 7 | 5 | 2 | 6 | 4 | 1 | |
| F9 | Best | 1.108133 | 1.047001 | 1.170710 | 1.081691 | 1.040930 | 1.133197 | 1.035531 | 1.040001 |
| Worst | 1.385159 | 1.157980 | 1.294128 | 1.379456 | 1.144856 | 1.376869 | 1.149305 | 1.128768 | |
| Mean | 1.209967 | 1.096928 | 1.235022 | 1.202045 | 1.080990 | 1.223293 | 1.090168 | 1.080195 | |
| Std | 6.9719 × 10−2 | 2.7865 × 10−2 | 3.9300 × 10−2 | 7.4747 × 10−2 | 2.8149 × 10−2 | 6.2415 × 10−2 | 3.2839 × 10−2 | 2.8916 × 10−2 | |
| Rank | 6 | 4 | 8 | 5 | 2 | 7 | 3 | 1 | |
| F10 | Best | 11.6185 | 7.491409 | 1.000001 | 1.000000 | 1.000000 | 3.013315 | 3.013315 | 1.000000 |
| Worst | 21.5071 | 21.511923 | 21.452565 | 21.496805 | 21.501699 | 21.534074 | 21.539023 | 21.500175 | |
| Mean | 20.0395 | 20.701859 | 16.406949 | 15.824920 | 18.436521 | 18.611377 | 19.590365 | 17.416985 | |
| Std | 1.05 × 101 | 3.1102 × 100 | 8.0406 × 100 | 8.3796 × 100 | 7.1870 × 100 | 6.0449 × 100 | 5.5736 × 100 | 8.1379 × 100 | |
| Rank | 7 | 8 | 2 | 1 | 4 | 5 | 6 | 3 | |
| Mean Rank | 6.5 | 4.2 | 6.3 | 4.5 | 4.3 | 5.7 | 2.9 | 1.5 | |
| Median Rank | 6.5 | 4 | 6.5 | 4.5 | 4 | 6.5 | 3 | 1 | |
| Result | 8 | 3 | 7 | 5 | 4 | 6 | 2 | 1 | |
| Algorithm | Parameter | Value |
|---|---|---|
| JS | C0 | 0.5 |
| EJS | C0 | 0.5 |
| Selection probability p | 0.5 | |
| HHO | Initial energy E0 | [−1, 1] |
| GBO | Constant parameters | βmin = 0.2, βmax = 1/2 |
| Probability parameter pr | 0.5 | |
| WOA | a, b | Decreasing from 2 to 0 with linearly 1 |
| AOA | C | C1 = 2, C2 = 6, C3 = 1, C4 = 2 |
| SCA | a | 2 |
| BMO | pl | 7 |
| SSA | Initial speed v0 | 0 |
| SOA | Control Parameter A | Decreasing from 2 to 0 with linearly |
| The value of fc | 0 | |
| PSO | Cognitive coefficient | 2 |
| Social coefficient | 2 | |
| Inertia constant | decreases from 0.8 to 0.2 linearly | |
| MTDE | Constant parameters | WinIter = 20, H = 5, initial = 0.001, final = 2, Mu = log(D), μf = 0.5, σ = 0.2 |
| No. | Result | Algorithm | |||||||
|---|---|---|---|---|---|---|---|---|---|
| SSA | SOA | PSO | WOA | SCA | MTDE | JS | EJS | ||
| F1 | Best | 2.03 × 103 | 1 | 7.46 × 103 | 1.57 × 102 | 1 | 1 | 1 | 1 |
| Worst | 3.39 × 106 | 2.38 × 102 | 2.30 × 105 | 2.06 × 107 | 3.60 × 106 | 1.0001 | 9.62 × 103 | 1 | |
| Mean | 7.55 × 105 | 2.28 × 101 | 7.18 × 104 | 4.22 × 106 | 3.87 × 105 | 1 | 5.61 × 102 | 1 | |
| Std | 6.94 × 1011 | 3.33 × 103 | 3.61 × 109 | 3.72 × 1013 | 9.30 × 1011 | 4.33 × 10−1 | 4.57 × 106 | 1.56 × 10−24 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,269,450 | |
| Rank | 7 | 3 | 5 | 8 | 6 | 2 | 4 | 1 | |
| F2 | Best | 1.37 × 102 | 4.2578 | 1.51 × 102 | 2.36 × 103 | 2.81 × 101 | 3.6598 | 4.0952 | 4.1721 |
| Worst | 2.33 × 103 | 2.02 × 102 | 4.40 × 102 | 1.94 × 104 | 4.13 × 103 | 1.63 × 101 | 4.05 × 101 | 4.2865 | |
| Mean | 5.86 × 102 | 3.39 × 101 | 2.61 × 102 | 7.21 × 103 | 2.42 × 103 | 6.7871 | 8.3173 | 4.2474 | |
| Std | 2.95 × 105 | 2.99 × 103 | 7.68 × 103 | 1.52 × 107 | 1.09 × 106 | 8.5241 | 6.44 × 101 | 8.34 × 10−4 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50050 | 4,278,650 | |
| Rank | 6 | 4 | 5 | 8 | 7 | 2 | 3 | 1 | |
| F3 | Best | 1 | 5.5227 | 1.4091 | 1.0114 | 4.9662 | 1.4092 | 1.4190 | 1 |
| Worst | 7.3871 | 11.7128 | 6.7120 | 8.6335 | 11.1873 | 2.9206 | 5.0663 | 1.4101 | |
| Mean | 3.5624 | 9.6919 | 2.0993 | 4.3972 | 8.7119 | 1.6112 | 3.0739 | 1.3683 | |
| Std | 3.4887 | 2.3448 | 2.9966 | 5.0363 | 3.021 | 1.80 × 10−1 | 1.3527 | 1.59 × 10−2 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,288,670 | |
| Rank | 5 | 8 | 3 | 6 | 7 | 2 | 4 | 1 | |
| F4 | Best | 10.9496 | 12.8433 | 8.9597 | 11.0267 | 24.2144 | 1.3311 | 8.9597 | 1.9950 |
| Worst | 55.7222 | 43.2380 | 25.8739 | 97.5722 | 55.3016 | 8.9603 | 32.8386 | 16.9193 | |
| Mean | 25.2778 | 24.5804 | 16.6427 | 50.0062 | 41.7837 | 5.7551 | 14.1974 | 9.1587 | |
| Std | 153.3892 | 88.2880 | 22.2697 | 508.0421 | 84.6501 | 4.6816 | 29.5700 | 16.9436 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,287,350 | |
| Rank | 6 | 5 | 4 | 8 | 7 | 1 | 3 | 2 | |
| F5 | Best | 1.0566 | 1.4885 | 1 | 1.2966 | 4.5055 | 1 | 1.0172 | 1.0099 |
| Worst | 1.6835 | 15.6787 | 1.2437 | 3.3065 | 10.5726 | 1.0319 | 1.1846 | 1.1454 | |
| Mean | 1.2653 | 3.4743 | 1.1169 | 2.0409 | 6.8461 | 1.0059 | 1.0728 | 1.0625 | |
| Std | 2.98 × 10−2 | 9.4315 | 4.71 × 10−3 | 2.52 × 10−1 | 2.3672 | 9.52 × 10−5 | 1.81 × 10−3 | 1.55 × 10−3 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,282,650 | |
| Rank | 5 | 7 | 4 | 6 | 8 | 1 | 3 | 2 | |
| F6 | Best | 1.5031 | 5.5717 | 1 | 5.9743 | 4.9522 | 1 | 1.015 | 1 |
| Worst | 7.6048 | 9.9222 | 5.6087 | 11.8140 | 9.1251 | 2.500 | 3.5932 | 1.0596 | |
| Mean | 4.4052 | 7.4945 | 2.4119 | 8.5441 | 6.9821 | 1.1239 | 1.674 | 1.0034 | |
| Std | 3.9027 | 1.8243 | 1.9215 | 2.0366 | 1.1457 | 1.28 × 10−1 | 4.30 × 10−1 | 1.78 × 10−4 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,280,150 | |
| Rank | 5 | 7 | 4 | 8 | 6 | 2 | 3 | 1 | |
| F7 | Best | 5.16 × 102 | 4.86 × 102 | 2.38 × 102 | 5.33 × 102 | 1.17 × 103 | 1.2575 | 3.57 × 102 | 1.3747 |
| Worst | 1.67 × 103 | 1.39 × 103 | 1.17 × 103 | 1.74 × 103 | 1.74 × 103 | 1.57 × 102 | 1.35 × 103 | 1.10 × 103 | |
| Mean | 8.93 × 102 | 9.36 × 102 | 7.26 × 102 | 1.23 × 103 | 1.45 × 103 | 6.77 × 101 | 7.93 × 102 | 5.81 × 102 | |
| Std | 1.02 × 105 | 1.01 × 105 | 7.03 × 104 | 9.80 × 104 | 2.14 × 104 | 3.04 × 103 | 7.60 × 104 | 1.20 × 105 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,271,650 | |
| Rank | 5 | 6 | 3 | 7 | 8 | 1 | 4 | 2 | |
| F8 | Best | 2.8406 | 3.3827 | 1.4577 | 4.0885 | 3.8107 | 2.3048 | 2.2607 | 1.8870 |
| Worst | 4.5761 | 5.0174 | 4.4825 | 5.0042 | 4.6990 | 3.6979 | 4.1202 | 3.6695 | |
| Mean | 3.8634 | 4.3280 | 3.4510 | 4.5452 | 4.2684 | 3.0618 | 3.6681 | 2.8739 | |
| Std | 2.10 × 10−1 | 1.29 × 10−1 | 3.96 × 10−1 | 8.09 × 10−2 | 7.10 × 10−2 | 1.46 × 10−1 | 1.69 × 10−1 | 1.96 × 10−1 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,282,450 | |
| Rank | 5 | 7 | 3 | 8 | 6 | 2 | 4 | 1 | |
| F9 | Best | 1.1179 | 1.1342 | 1.0353 | 1.1215 | 1.3690 | 1.1001 | 1.1084 | 1.0222 |
| Worst | 1.9214 | 1.5262 | 1.2829 | 1.6979 | 1.7938 | 1.2156 | 1.3049 | 1.1698 | |
| Mean | 1.3812 | 1.3216 | 1.1108 | 1.3552 | 1.5182 | 1.1440 | 1.1981 | 1.0788 | |
| Std | 4.82 × 10−2 | 1.26 × 10−2 | 3.11 × 10−3 | 2.22 × 10−2 | 1.44 × 10−2 | 8.23 × 10−4 | 3.68 × 10−3 | 1.57 × 10−3 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,289,150 | |
| Rank | 7 | 5 | 2 | 6 | 8 | 3 | 4 | 1 | |
| F10 | Best | 20.9965 | 21.1771 | 21.0431 | 21.0073 | 15.0350 | 21.0899 | 11.6185 | 2.1551 |
| Worst | 21.1029 | 21.5108 | 21.4662 | 21.3630 | 21.5155 | 21.2469 | 21.5071 | 21.5214 | |
| Mean | 21.0130 | 21.3651 | 21.2159 | 21.1252 | 21.0376 | 21.1722 | 20.0395 | 18.6298 | |
| Std | 1.10 × 10−3 | 8.41 × 10−3 | 1.04 × 10−2 | 1.04 × 10−2 | 2.0042 | 2.42 × 10−3 | 1.05 × 101 | 4.58 × 101 | |
| MeanFEs | 50,050 | 50,000 | 50,000 | 50,000 | 50,000 | 50,050 | 50,050 | 4,287,350 | |
| Rank | 3 | 8 | 7 | 5 | 4 | 6 | 2 | 1 | |
| Mean Rank | 5.4 | 6.0 | 4.0 | 7.0 | 6.7 | 2.2 | 3.4 | 1.3 | |
| Medial Rank | 5 | 6.5 | 4 | 7.5 | 7 | 2 | 3.5 | 1 | |
| Result | 5 | 6 | 4 | 8 | 7 | 2 | 3 | 1 | |
| Function | Algorithm | ||||||
|---|---|---|---|---|---|---|---|
| SSA | SOA | PSO | WOA | SCA | MTDE | JS | |
| F1 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 |
| F2 | 6.791 × 10−8 | 2.56 × 10−7 | 6.791 × 10−8 | 6.791 × 10−8 | 6.791 × 10−8 | 1.60 × 10−5 | 1.20 × 10−6 |
| F3 | 1.35 × 10−3 | 6.791 × 10−8 | 4.20 × 10−3 | 9.13 × 10−7 | 6.791 × 10−8 | 1.66 × 10−7 | 6.791 × 10−8 |
| F4 | 1.37 × 10−6 | 7.93 × 10−7 | 4.15 × 10−5 | 1.65 × 10−7 | 6.78 × 10−8 | 2.56 × 10−2 | 2.04 × 10−3 |
| F5 | 2.06 × 10−6 | 6.791 × 10−8 | 6.04 × 10−3 | 6.791 × 10−8 | 6.791 × 10−8 | 1.92 × 10−7 | 4.90 × 10−1 |
| F6 | 4.001 × 10−8 | 4.001 × 10−8 | 1.14 × 10−6 | 4.001 × 10−8 | 4.001 × 10−8 | 2.15 × 10−2 | 5.45 × 10−8 |
| F7 | 1.33 × 10−2 | 3.64 × 10−3 | 1.99 × 10−1 | 5.17 × 10−6 | 6.791 × 10−8 | 5.90 × 10−5 | 8.10 × 10−2 |
| F8 | 2.06 × 10−6 | 1.06 × 10−7 | 5.631 × 10−4 | 6.791 × 10−8 | 6.791 × 10−8 | 1.48 × 10−1 | 1.25 × 10−5 |
| F9 | 1.92 × 10−7 | 1.06 × 10−7 | 4.68 × 10−2 | 9.17 × 10−8 | 6.791 × 10−8 | 2.04 × 10−5 | 9.13 × 10−7 |
| F10 | 1.61 × 10−4 | 9.68 × 10−1 | 8.35 × 10−4 | 3.05 × 10−4 | 3.512 × 10−1 | 1.614 × 10−4 | 3.94 × 10−1 |
| +/=/− | 0/0/10 | 0/1/9 | 0/1/9 | 0/0/10 | 0/1/9 | 3/1/6 | 0/3/7 |
| Algorithm | Design Variables | Evaluation Indicators (Weight) | |||||
|---|---|---|---|---|---|---|---|
| d | D | N | Minimum | Mean | Std | Worst | |
| JS | 0.0516656 | 0.355897 | 11.3546 | 0.012666 | 0.012710 | 6.0819 × 10−10 | 0.012761 |
| EJS | 0.0520738 | 0.366045 | 10.7624 | 0.012665 | 0.012668 | 3.4221 × 10−12 | 0.012671 |
| ALO | 0.050000 | 0.317425 | 14.0278 | 0.012670 | 0.013001 | 1.7155 × 10−7 | 0.014091 |
| GOA | 0.067340 | 0.863100 | 2.2960 | 0.012719 | 0.015966 | 4.2678 × 10−6 | 0.019652 |
| GWO | 0.053658 | 0.405890 | 8.9014 | 0.012678 | 0.012720 | 2.4396 × 10−9 | 0.012919 |
| MFO | 0.058979 | 0.558790 | 4.9783 | 0.012666 | 0.012969 | 2.2056 × 10−7 | 0.014735 |
| MVO | 0.069094 | 0.937540 | 2.0181 | 0.012878 | 0.017167 | 2.4197 × 10−6 | 0.018036 |
| WOA | 0.060649 | 0.613040 | 4.2157 | 0.012687 | 0.013813 | 1.4231 × 10−6 | 0.017329 |
| SCA | 0.050000 | 0.317316 | 14.3155 | 0.012723 | 0.012900 | 9.9693 × 10−9 | 0.013100 |
| HHO | 0.057540 | 0.514510 | 5.7776 | 0.012679 | 0.013872 | 1.1585 × 10−6 | 0.017644 |
| Algorithm | Design Variables | Evaluation Indicators (Cost) | ||||||
|---|---|---|---|---|---|---|---|---|
| Ts | Th | R | L | Optimal | Mean | Std | Worst | |
| JS | 0.7770396 | 0.3848140 | 40.42532 | 198.5706 | 5870.1250 | 5871.1056 | 3.3266 | 5877.8328 |
| EJS | 0.7745491 | 0.3832039 | 40.31962 | 200.0000 | 5870.1240 | 5870.1240 | 6.6383 × 10−22 | 5870.1240 |
| ALO | 1.1027100 | 0.5433020 | 57.25430 | 49.5071 | 5870.1299 | 6334.3010 | 254,190.1288 | 7301.0969 |
| GOA | 0.8665065 | 1.1792950 | 45.19656 | 141.6881 | 6664.3149 | 8115.7627 | 2,663,313.7787 | 13,589.6419 |
| GWO | 0.7741732 | 0.3833187 | 40.31964 | 200.0000 | 5870.3903 | 5961.9718 | 81,459.1646 | 7019.5910 |
| MFO | 0.7827661 | 0.3872136 | 40.74312 | 194.1874 | 5870.1240 | 6241.3384 | 294,817.8949 | 7301.1955 |
| MVO | 1.2263800 | 0.6031600 | 63.75980 | 17.4111 | 6024.7668 | 6680.0326 | 207,592.6589 | 7550.9419 |
| WOA | 0.8519145 | 0.5603772 | 43.42803 | 160.8293 | 6314.9267 | 7300.9278 | 478,781.6422 | 8662.6477 |
| SCA | 0.8046946 | 0.3993354 | 41.28378 | 196.3765 | 6103.2795 | 6618.5766 | 199,596.9822 | 7746.5638 |
| HHO | 1.0860800 | 0.5215510 | 54.99250 | 63.0875 | 5972.4547 | 6715.7933 | 175,488.7714 | 7306.5959 |
| Algorithm | Design Variables | Evaluation Indicators (Cost) | ||||||
|---|---|---|---|---|---|---|---|---|
| TA | TB | TC | TD | Optimal | Mean | Std | Worst | |
| JS | 53 | 26 | 15 | 51 | 2.3078 × 10−11 | 5.8263 × 10−11 | 5.9403 × 10−20 | 1.0936 × 10−9 |
| EJS | 43 | 16 | 19 | 49 | 2.7009 × 10−12 | 2.9871 × 10−11 | 4.7338 × 10−21 | 3.0676 × 10−10 |
| ALO | 27 | 12 | 12 | 37 | 1.8274 × 10−8 | 3.8599 × 10−9 | 3.1347 × 10−17 | 1.8274 × 10−8 |
| GOA | 59 | 21 | 15 | 37 | 3.0676 × 10−10 | 1.8504 × 10−9 | 3.5997 × 10−17 | 2.7265 × 10−8 |
| GWO | 49 | 16 | 19 | 43 | 2.7009 × 10−12 | 1.2263 × 10−10 | 8.8927 × 10−20 | 9.9216 × 10−10 |
| MFO | 54 | 37 | 12 | 57 | 8.8876 × 10−10 | 4.8239 × 10−9 | 6.9029 × 10−17 | 2.7265 × 10−8 |
| MVO | 57 | 37 | 12 | 54 | 8.8876 × 10−10 | 4.8240 × 10−10 | 3.6788 × 10−19 | 2.3576 × 10−9 |
| WOA | 53 | 13 | 20 | 34 | 2.3078 × 10−11 | 1.0561 × 10−9 | 8.0578 × 10−19 | 2.3576 × 10−9 |
| SCA | 59 | 21 | 15 | 37 | 3.0676 × 10−10 | 1.4669 × 10−9 | 1.2268 × 10−17 | 1.6200 × 10−8 |
| HHO | 60 | 15 | 15 | 26 | 2.3576 × 10−9 | 1.6465 × 10−9 | 1.6339 × 10−17 | 1.8274 × 10−8 |
| Algorithm | Design Variables | Evaluation Indicators (Weight) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Best | Mean | Std | Worst | ||||||
| JS | 6.0112 | 5.3155 | 4.4904 | 3.5012 | 2.1554 | 1.3365 | 1.3365 | 4.7910 × 10−12 | 1.3365 |
| EJS | 6.0160 | 5.3092 | 4.4943 | 3.5015 | 2.1527 | 1.3365 | 1.3365 | 3.0445 × 10−15 | 1.3365 |
| ALO | 6.0210 | 5.3121 | 4.4844 | 3.5027 | 2.1535 | 1.3365 | 1.3365 | 1.0989 × 10−10 | 1.3366 |
| GOA | 5.9451 | 5.3673 | 4.5345 | 3.5124 | 2.1191 | 1.3366 | 1.3370 | 2.2100 × 10−7 | 1.3381 |
| GWO | 6.0251 | 5.3171 | 4.4790 | 3.4924 | 2.1606 | 1.3365 | 1.3366 | 4.0520 × 10−10 | 1.3366 |
| MFO | 5.9850 | 5.3610 | 4.4794 | 3.5137 | 2.1364 | 1.3366 | 1.3369 | 5.6538 × 10−8 | 1.3375 |
| MVO | 6.0900 | 5.2498 | 4.5082 | 3.4908 | 2.1384 | 1.3367 | 1.3370 | 1.9942 × 10−7 | 1.3382 |
| WOA | 6.5788 | 5.3648 | 4.7280 | 4.0443 | 1.5657 | 1.3489 | 1.4467 | 7.4364 × 10−3 | 1.6955 |
| SCA | 5.7691 | 5.4245 | 4.7114 | 3.2731 | 2.8091 | 1.3494 | 1.3780 | 2.0906 × 10−4 | 1.4005 |
| HHO | 6.3177 | 5.2692 | 4.3444 | 3.4316 | 2.1528 | 1.3368 | 1.3387 | 1.5729 × 10−6 | 1.3413 |
| Algorithm | Design Variables | Evaluation Indicators (Weight) | ||||
|---|---|---|---|---|---|---|
| Minimum | Mean | Std | Worst | |||
| JS | 0.78862 | 0.40841 | 263.8958 | 263.8958 | 2.7666 × 10−11 | 263.8958 |
| EJS | 0.78867 | 0.40825 | 263.8958 | 263.8958 | 2.3809 × 10−26 | 263.8958 |
| ALO | 0.78796 | 0.41027 | 263.8962 | 263.8959 | 3.9186 × 10−8 | 263.8967 |
| GOA | 0.78972 | 0.40529 | 263.8966 | 263.9962 | 5.2969 × 10−2 | 264.7909 |
| GWO | 0.78999 | 0.40457 | 263.8992 | 263.8977 | 2.5911 × 10−6 | 263.9010 |
| MFO | 0.78560 | 0.41702 | 263.9028 | 263.9305 | 2.6756 × 10−3 | 264.0610 |
| MVO | 0.78762 | 0.41125 | 263.8966 | 263.8969 | 8.2328 × 10−7 | 263.8990 |
| WOA | 0.79180 | 0.39949 | 263.9029 | 264.0623 | 4.9253 × 10−2 | 264.7084 |
| SCA | 0.79582 | 0.38879 | 263.9704 | 264.9253 | 1.7790 × 101 | 282.8427 |
| HHO | 0.77258 | 0.45580 | 264.0975 | 264.0089 | 1.6864 × 10−2 | 264.3323 |
| Algorithm | Design Variables | Minimum Mass | |||||||
|---|---|---|---|---|---|---|---|---|---|
| JS | 0.0066375 | 0.045319 | 3.6303 | 0.0012569 | 1.9773 | 0.78542 | 0.16327 | 3.9084 | 464.5255 |
| EJS | 0.0088242 | 0.040509 | 3.6138 | 0.0010299 | 1.9941 | 0.77452 | 0.15717 | 3.9438 | 464.5177 |
| ALO | 3.5940000 | 0.028565 | 3.4983 | 0.0010007 | 4.5648 | 0.77050 | 0.13363 | 3.7717 | 464.6441 |
| GOA | 0.0010000 | 0.052098 | 3.4372 | 0.0117620 | 4.9753 | 0.70938 | 0.11953 | 3.8916 | 464.5766 |
| GWO | 0.0352840 | 0.101400 | 3.6433 | 0.0186540 | 1.9827 | 0.77268 | 0.13597 | 3.9080 | 464.8678 |
| MFO | 0.0010000 | 0.054239 | 3.4971 | 0.0010000 | 1.9624 | 0.78602 | 0.15505 | 4.0293 | 464.6413 |
| MVO | 0.0631310 | 0.031478 | 3.6963 | 0.0018894 | 2.1164 | 0.78697 | 0.14766 | 3.8506 | 464.5775 |
| WOA | 0.0160690 | 0.659360 | 4.3802 | 0.1496500 | 3.6878 | 1.51760 | 1.25870 | 2.2564 | 481.5535 |
| SCA | 0.0890750 | 0.141850 | 3.5827 | 0.0010000 | 2.5481 | 0.66840 | 0.30984 | 3.8077 | 468.2995 |
| HHO | 0.0010000 | 0.162690 | 3.4298 | 0.0348380 | 1.8363 | 0.74599 | 0.18196 | 4.0619 | 468.0012 |
| Algorithm | Minimum | Worst | Mean | Std |
|---|---|---|---|---|
| JS | 464.5255 | 464.6061 | 464.5538 | 0.00043794 |
| EJS | 464.5177 | 464.5437 | 464.5255 | 4.7167 × 10−5 |
| ALO | 464.6441 | 566.3295 | 483.1 | 816.5387 |
| GOA | 464.5766 | 553.7468 | 483.3067 | 817.8789 |
| GWO | 464.8678 | 466.1551 | 465.3356 | 0.13529 |
| MFO | 464.6413 | 521.802 | 467.8903 | 161.3347 |
| MVO | 464.5775 | 467.4785 | 464.9683 | 0.38278 |
| WOA | 481.5535 | 629.2815 | 534.5016 | 1999.6866 |
| SCA | 468.2995 | 533.837 | 507.8849 | 685.4388 |
| HHO | 468.0012 | 508.5609 | 475.7416 | 83.3678 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, G.; Wang, J.; Li, M.; Hussien, A.G.; Abbas, M. EJS: Multi-Strategy Enhanced Jellyfish Search Algorithm for Engineering Applications. Mathematics 2023, 11, 851. https://doi.org/10.3390/math11040851
Hu G, Wang J, Li M, Hussien AG, Abbas M. EJS: Multi-Strategy Enhanced Jellyfish Search Algorithm for Engineering Applications. Mathematics. 2023; 11(4):851. https://doi.org/10.3390/math11040851
Chicago/Turabian StyleHu, Gang, Jiao Wang, Min Li, Abdelazim G. Hussien, and Muhammad Abbas. 2023. "EJS: Multi-Strategy Enhanced Jellyfish Search Algorithm for Engineering Applications" Mathematics 11, no. 4: 851. https://doi.org/10.3390/math11040851
APA StyleHu, G., Wang, J., Li, M., Hussien, A. G., & Abbas, M. (2023). EJS: Multi-Strategy Enhanced Jellyfish Search Algorithm for Engineering Applications. Mathematics, 11(4), 851. https://doi.org/10.3390/math11040851