
Multi-Agent Deep Q-Network Based Dynamic Controller Placement for Node Variable Software-Defined Mobile Edge-Cloud Computing Networks


Abstract
:1. Introduction
1.1. Motivation
1.2. Contribution
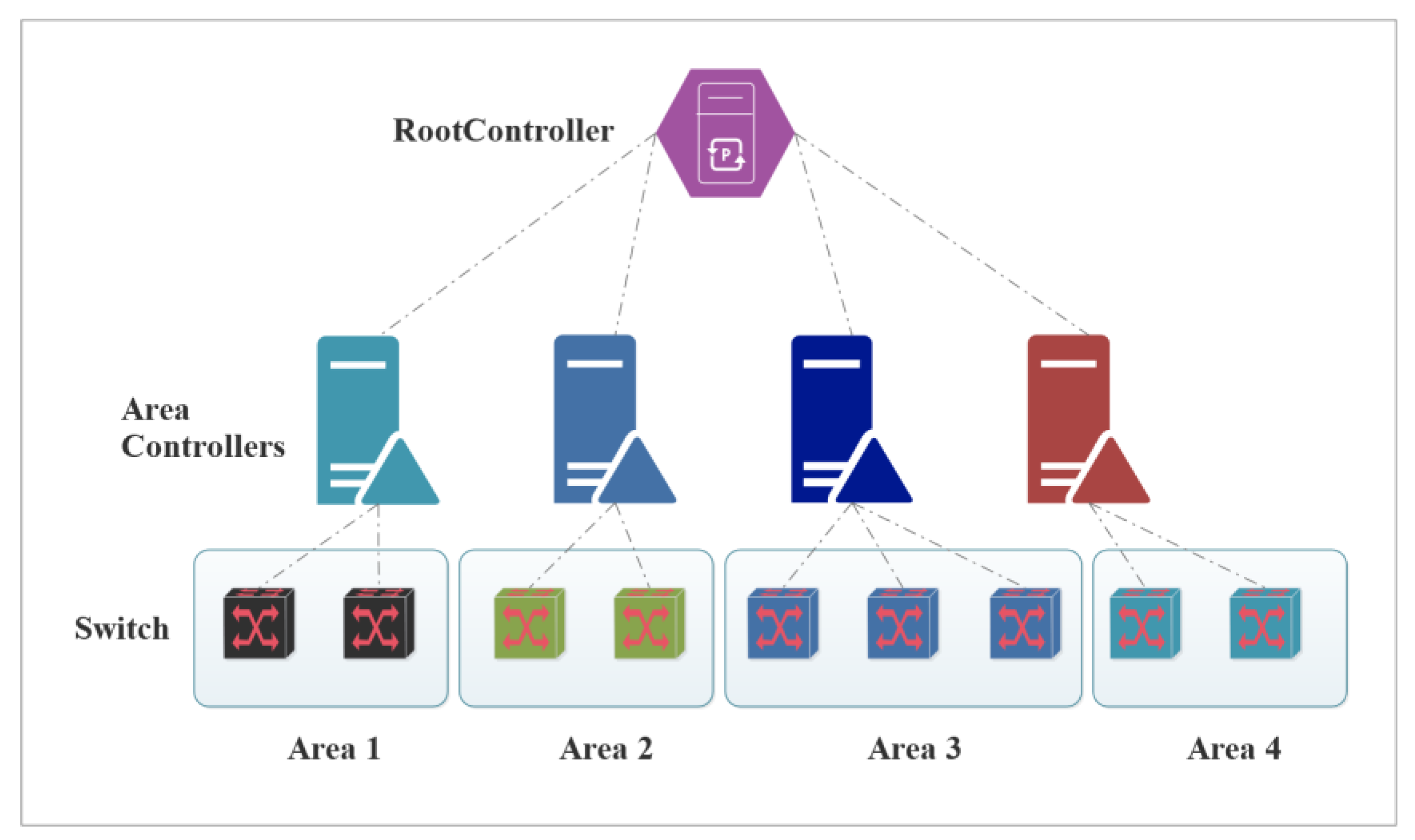
- We study a two-layer control plane containing area controllers and root controllers. We construct demand-aware latency, loading difference, and control reliability models to deploy the control plane.
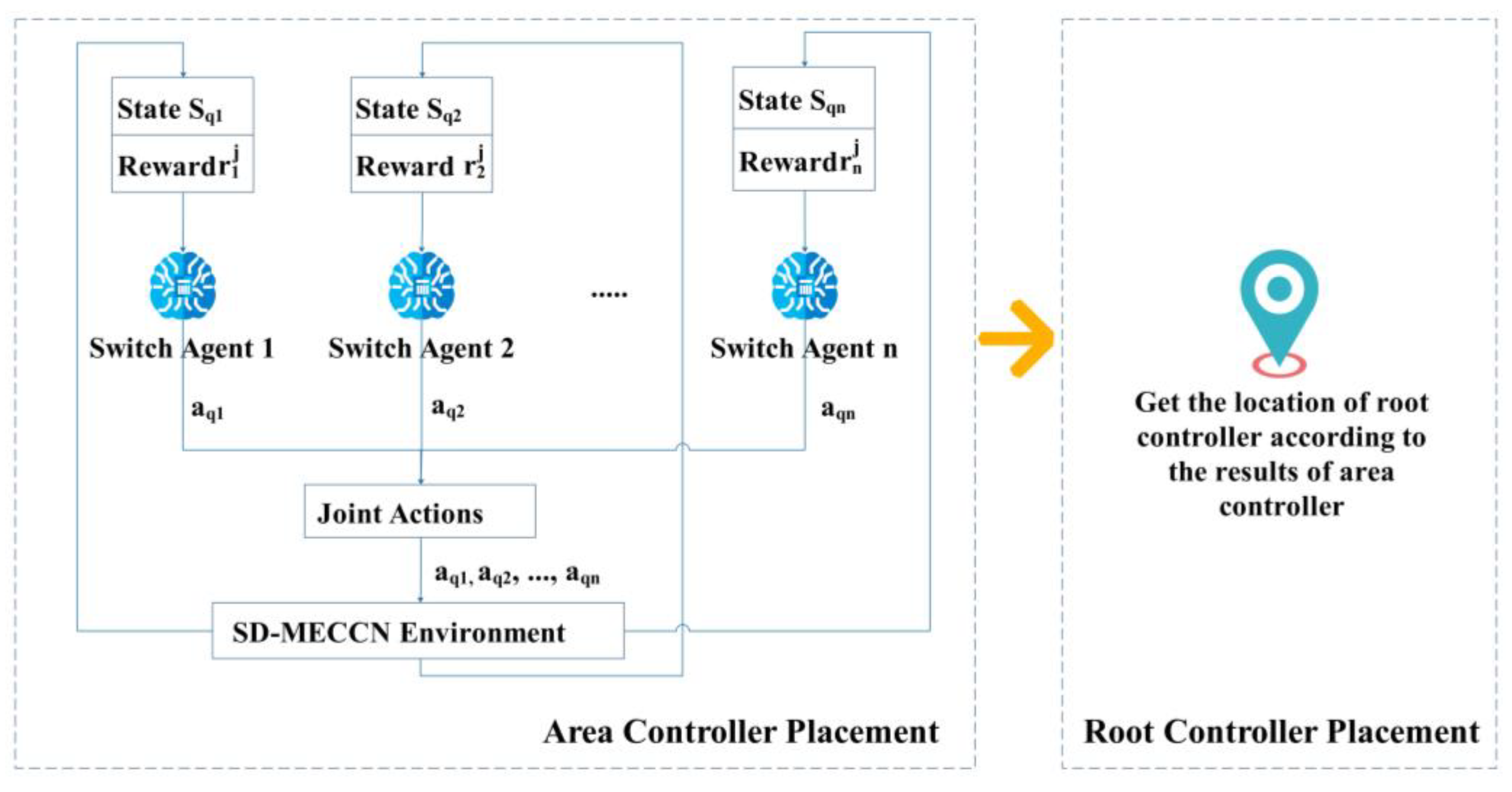
- We design a dynamic controller deployment algorithm based on multi-agent deep reinforcement learning to solve the controller deployment problem in networks with a variable number of switches.
- We dynamically adjust the number of controllers according to the controller load to solve the problem of scattered choices among agents in a multi-agent body system.
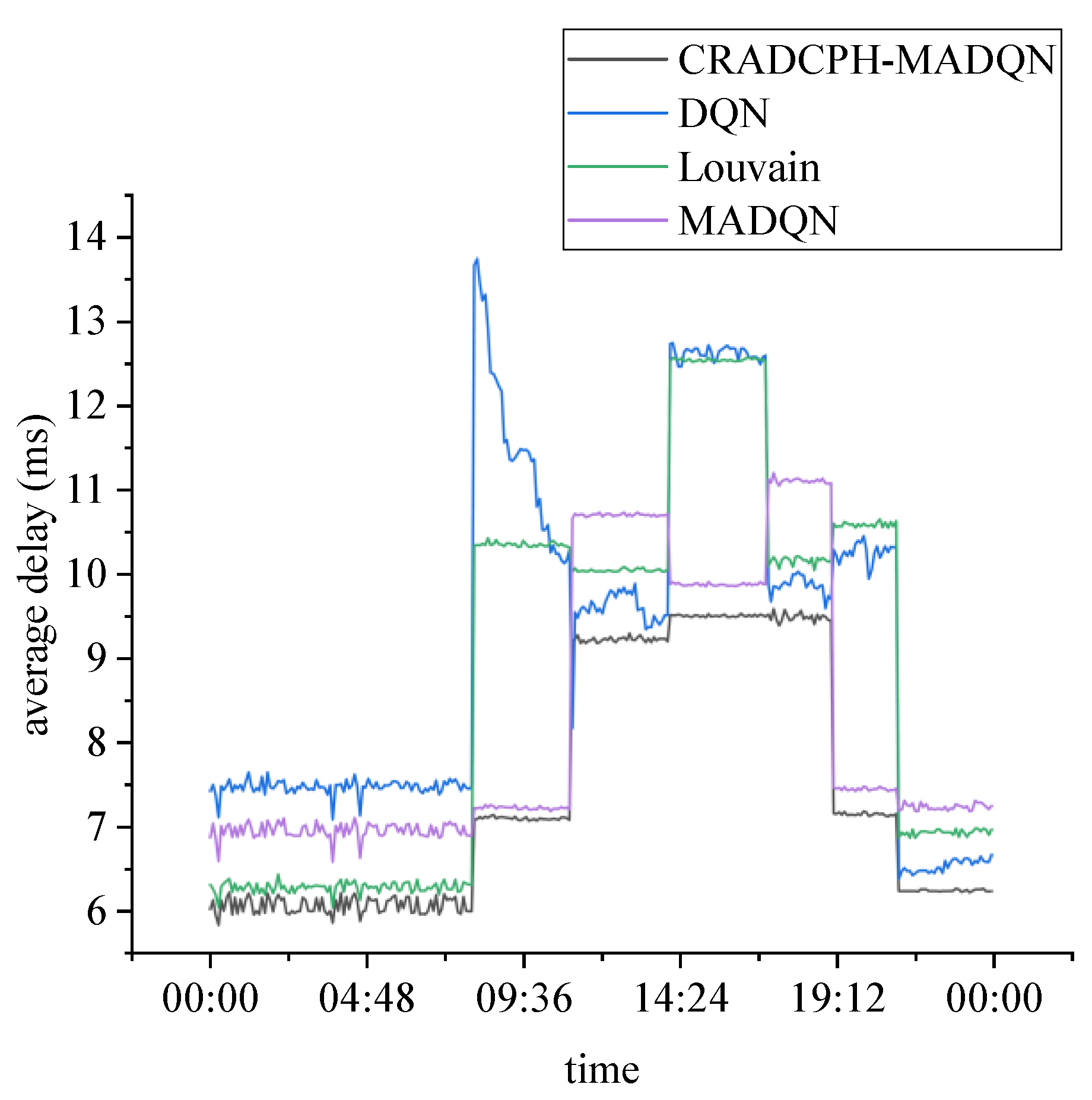
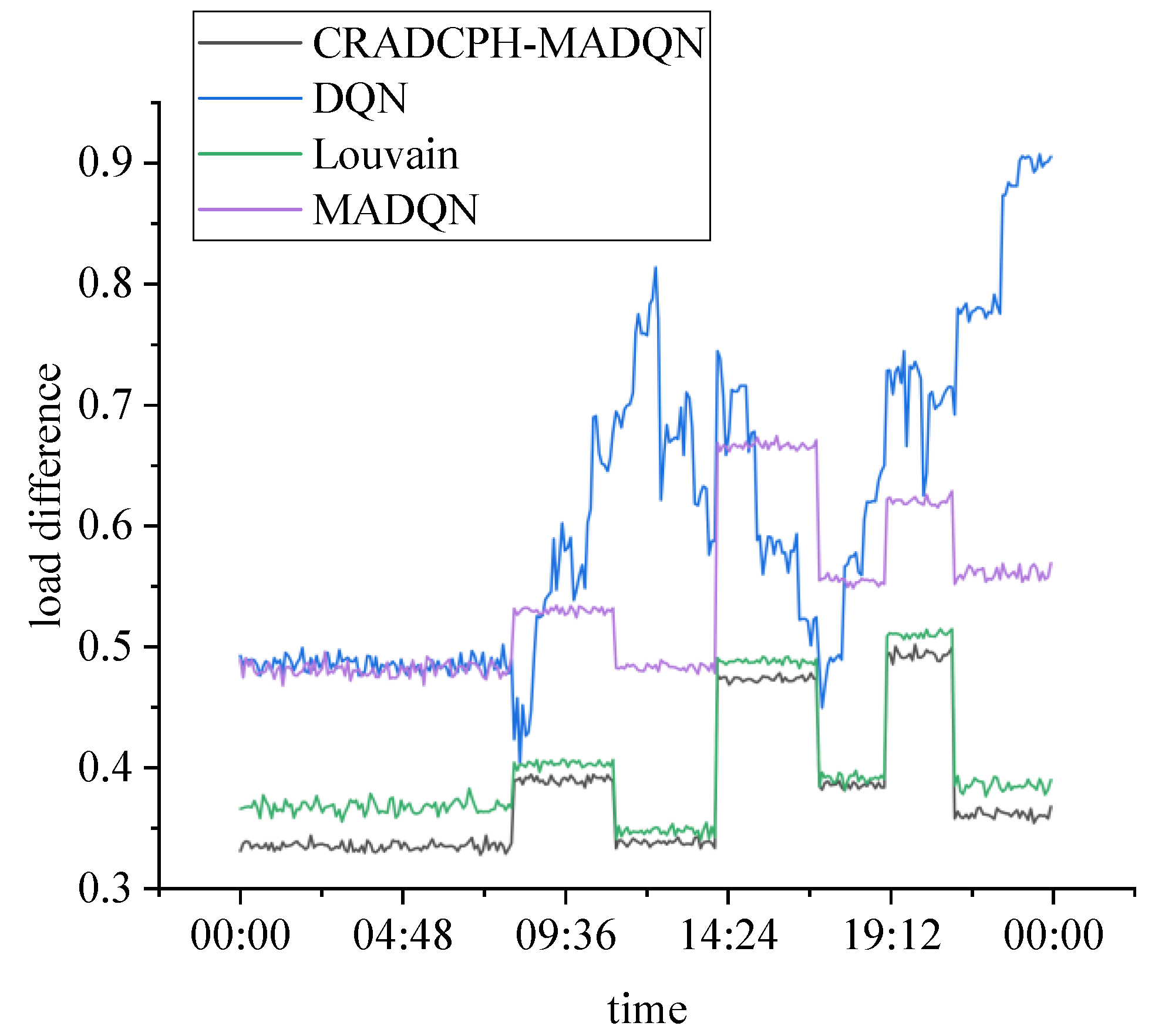
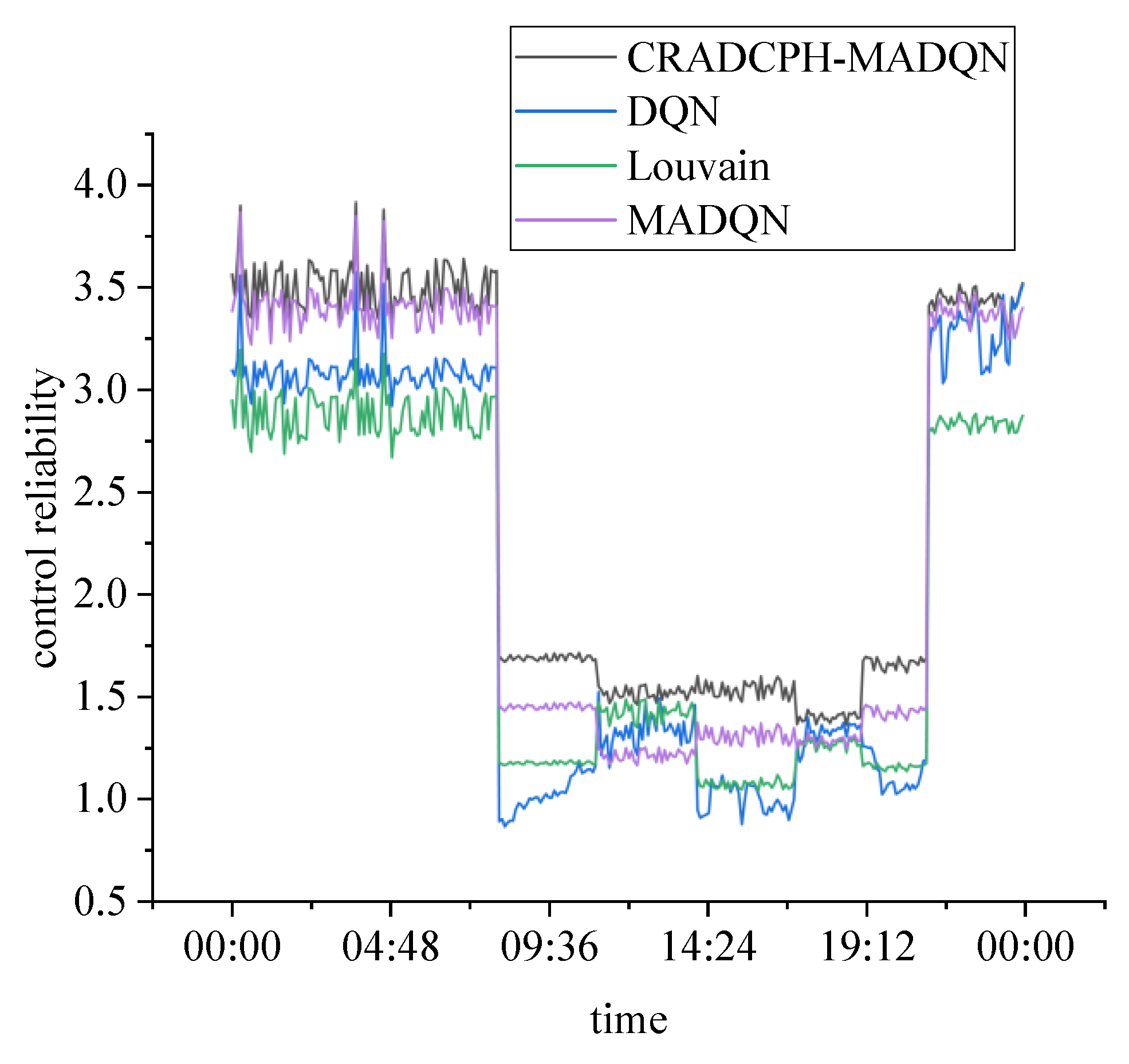
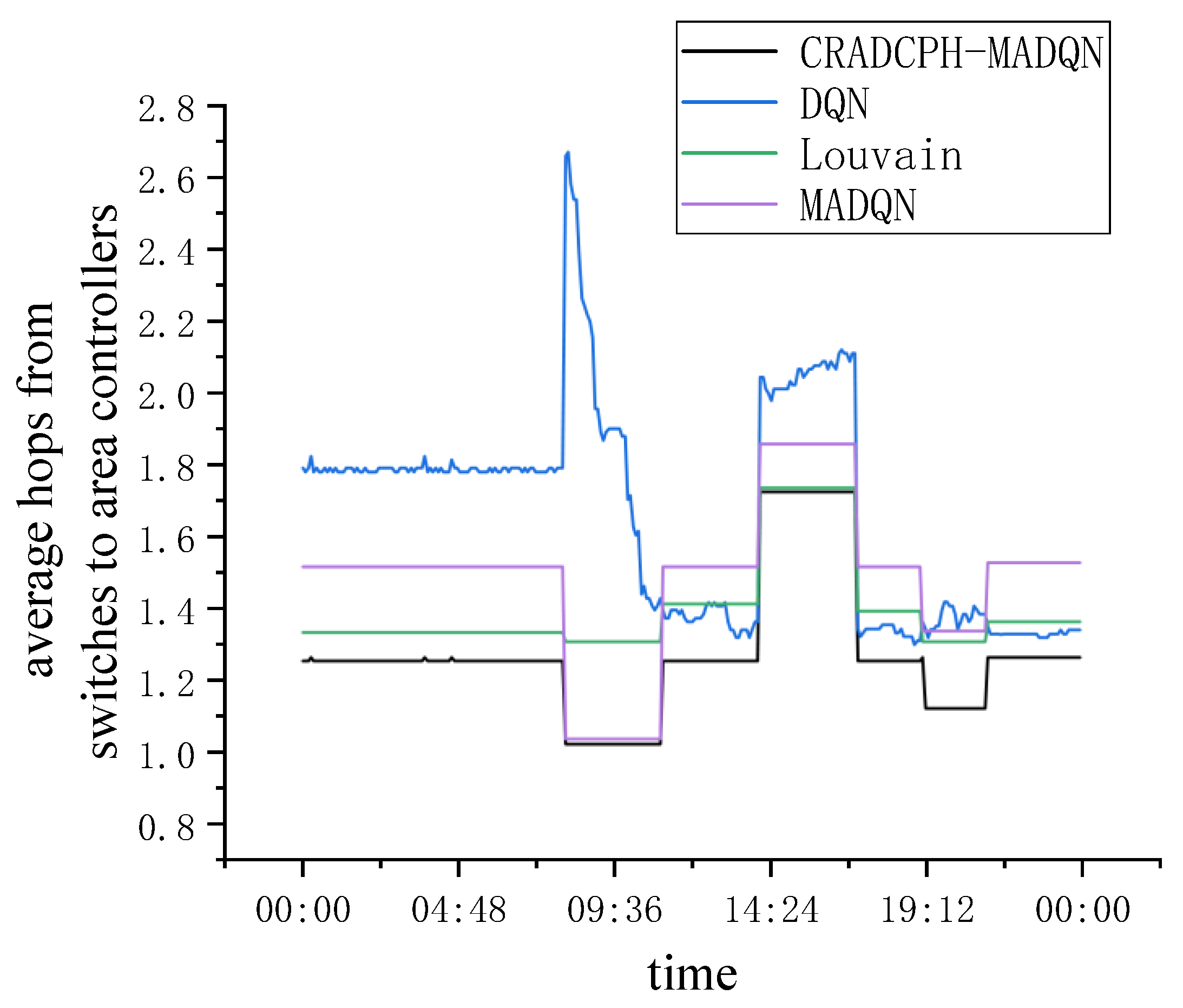
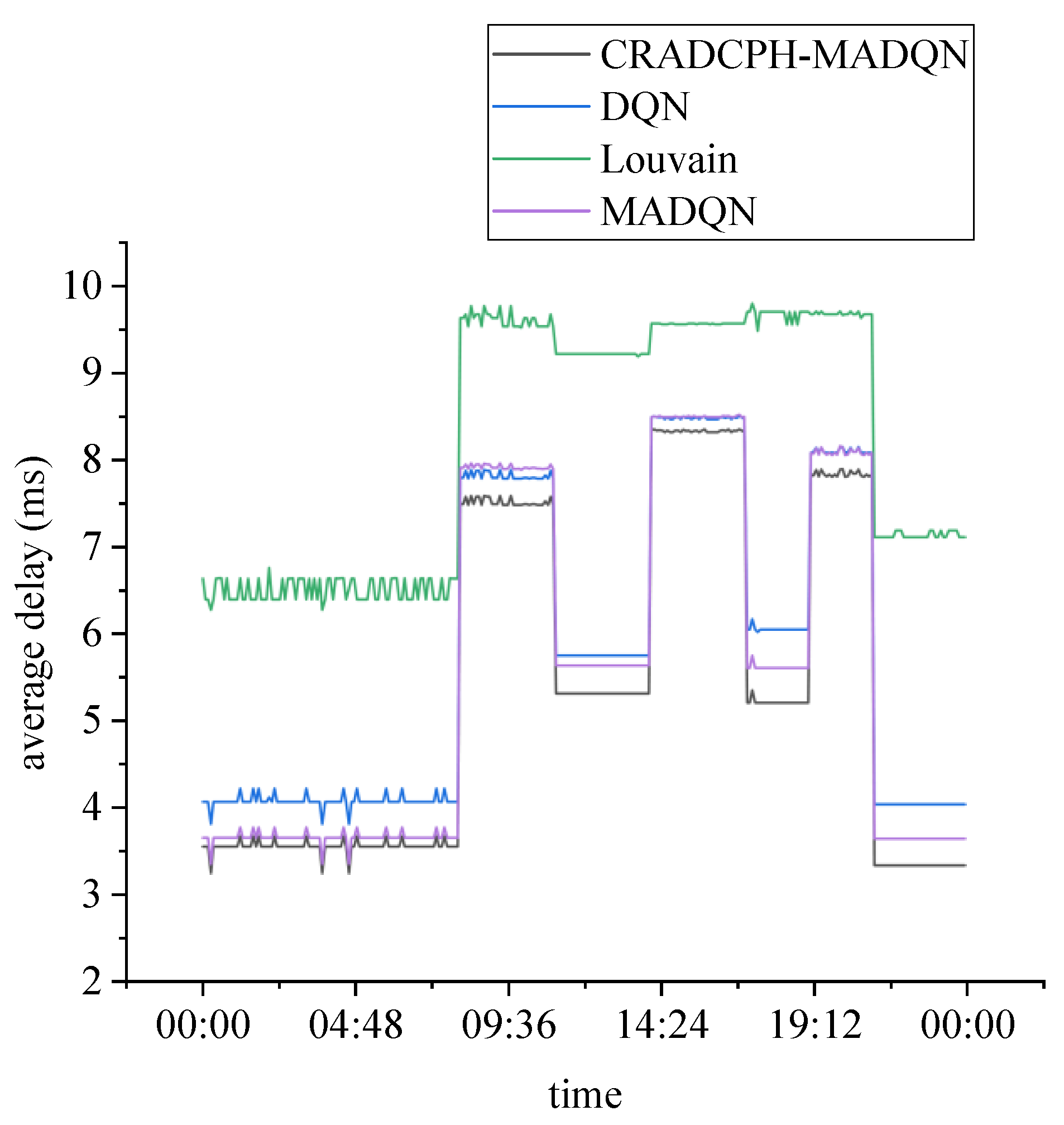
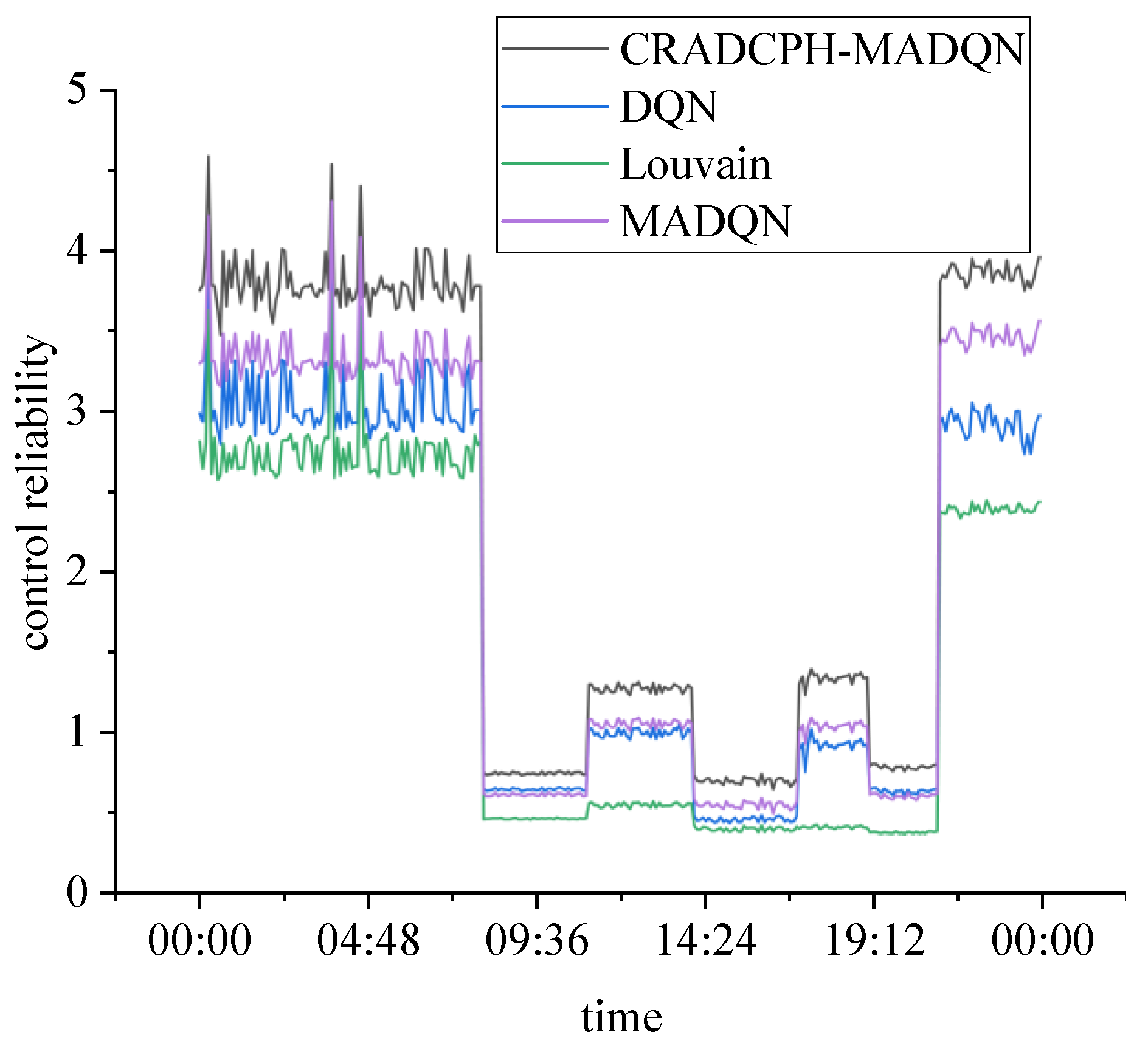
- The numerical results show that the CRADCPH-MADQN (Controller Requirement Aware Dynamic Controller Placement for Hierarchical Architecture based on Multi-agent Deep Q-network) algorithm outperforms the other three baselines, including Louvain-based algorithm [7], single-agent DQN-based algorithm [11], and MADQN- [10] (without node-variable networks consideration) based algorithm in terms of delay, load balance, and reliability.
2. Related Work
3. System Model
3.1. Network Model
3.2. Delay Model
3.3. Load Difference Model
3.4. Control Reliability Model
3.5. Problem Formulation
4. Dynamic Controller Placement for SD-MECCN
- 5.
- State space:
- 6.
- Action space:
- 7.
- Reward:
| Algorithm 1. The MADQN-based area controller placement |
| Input: Requests from different switches SR, number of mobile devices UD, node-variable network topology G, current number of switches CS; weight factors a,b,c Output: the solution of area controller placement 1. Initialize the multi-agent DQN environment envmadqn with topology G, SR, UD and a,b,c; 2. Initialize the initial actions of all agents preactions by the Louvain community detection algorithm; 3. for ep = 0; ep < maxep do 4. Initialize the initially state prestates of all agents according to preaction 5. for es = 0; es < maxstep do 6. for i = 0; i < CS do 7. Get the next action nextactions[i] of agent i according to prestates[i] by DQN; 8. end for 9. Get the next state nextstates, and the reward rews[i] according to nextactions; 10. for i = 0; i < CS do 11. Training the model in DQN of agents i according to prestate[i],nextstates[i],nextactions[i] and rews[i]; 12. end for 13. prestates = nextstates; 14. end for 15. end for 16. Obtain the solution of area controller placement according to the actions with the maximum sum of rewards. |
| Algorithm 2. The root controller placement |
| Input: Requests from different switches SR, number of mobile devices UD, node-variable network topology G, weight factors a,c, the actions areaactions of area controller placement agents, the number of area controllers NA; current number of switches CS; Output: the location of root controller RN 1. Initialize the algorithm with topology G, SR, UD, a, c and areaactions; 2. Get the delay from area controllers to the root controller yc by Equation (1); 3. Get the control reliability from area controllers to the root controller yc by Equation (10) 4. for i = 0; i < CS do 5. Get the reward of switches i; 6. end for 7. the node with the maximum reward is the location of the root controller. |
5. Performance Evaluation
5.1. Simulation Setting
5.2. The Performance of Area Controller Placement
5.3. The Performance of the Root Controller
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Lan, X.; Ren, J.; Cai, L. Efficient Computing Resource Sharing for Mobile Edge-Cloud Computing Networks. IEEE/ACM Trans. Netw. 2020, 28, 1227–1240. [Google Scholar] [CrossRef]
- Tuli, S.; Ilager, S.; Ramamohanarao, K.; Buyya, R. Dynamic Scheduling for Stochastic Edge-Cloud Computing Environments Using A3C Learning and Residual Recurrent Neural Networks. IEEE Trans. Mob. Comput. 2022, 21, 940–954. [Google Scholar] [CrossRef]
- Du, J.; Jiang, C.; Benslimane, A.; Guo, S.; Ren, Y. SDN-Based Resource Allocation in Edge and Cloud Computing Systems: An Evolutionary Stackelberg Differential Game Approach. IEEE/ACM Trans. Netw. 2022, 30, 1613–1628. [Google Scholar] [CrossRef]
- Liu, J.; Shi, Y.; Zhao, L.; Cao, Y.; Sun, W.; Kato, N. Joint Placement of Controllers and Gateways in SDN-Enabled 5G-Satellite Integrated Network. IEEE J. Sel. Areas Commun. 2018, 36, 221–232. [Google Scholar] [CrossRef]
- Toufga, S.; Abdellatif, S.; Assouane, H.; Owezarski, P.; Villemur, T. Towards dynamic controller placement in software defined vehicular networks. Sensors 2020, 20, 1701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, B.; Deng, X.; Deng, Y. Mobile-edge computing-based delay minimization controller placement in SDN-IoV. Comput. Netw. 2021, 193, 108049. [Google Scholar] [CrossRef]
- Hou, X.; Muqing, W.; Bo, L.; Yifeng, L. Multi-Controller Deployment Algorithm in Hierarchical Architecture for SDWAN. IEEE Access 2019, 7, 65839–65851. [Google Scholar] [CrossRef]
- Maity, I.; Dhiman, R.; Misra, S. MobiPlace: Mobility-Aware Controller Placement in Software-Defined Vehicular Networks. IEEE Trans. Veh. Technol. 2021, 70, 957–966. [Google Scholar] [CrossRef]
- Luong, N.C.; Hoang, D.T.; Gong, S.; Niyato, D.; Wang, P.; Liang, Y.C.; Kim, D.I. Applications of Deep Reinforcement Learning in Communications and Networking: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 3133–3174. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Deng, X.; Chen, X.; Deng, Y.; Yin, J. MEC-Based Dynamic Controller Placement in SD-IoV: A Deep Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2022, 71, 10044–10058. [Google Scholar] [CrossRef]
- Wu, Y.; Zhou, S.; Wei, Y.; Leng, S. Deep Reinforcement Learning for Controller Placement in Software Defined Network. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 1254–1259. [Google Scholar]
- Heller, B.; Sherwood, R.; McKeown, N. The controller placement problem. In Proceedings of the First Workshop on Hot Topics in Software Defined Networks (HotSDN’12), New York, NY, USA, 13 August 2012; pp. 7–12. [Google Scholar]
- Zhang, T.; Bianco, A.; Giaccone, P. The role of inter-controller traffic in SDN controllers placement. In Proceedings of the 2016 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN), Palo Alto, CA, USA, 7–10 November 2016; pp. 87–92. [Google Scholar]
- Han, L.; Li, Z.; Liu, W.; Dai, K.; Qu, W. Minimum Control Latency of SDN Controller Placement. In Proceedings of the 2016 IEEE Trustcom/BigDataSE/ISPA, Tianjin, China, 23–26 August 2016; pp. 2175–2180. [Google Scholar]
- Wang, G.; Zhao, Y.; Huang, J.; Wu, Y. An Effective Approach to Controller Placement in Software Defined Wide Area Networks. IEEE Trans. Netw. Serv. Manag. 2018, 15, 344–355. [Google Scholar] [CrossRef] [Green Version]
- Liyanage, K.S.K.; Ma, M.; Chong, P.H.J. Controller placement optimization in hierarchical distributed software defined vehicular networks. Comput. Netw. 2018, 135, 226–239. [Google Scholar] [CrossRef]
- Hu, Y.; Luo, T.; Wang, W.; Deng, C. On the load balanced controller placement problem in Software defined networks. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 2430–2434. [Google Scholar]
- Kaur, K.; Garg, S.; Kaddoum, G.; Kumar, N.; Gagnon, F. SDN-Based Internet of Autonomous Vehicles: An Energy-Efficient Approach for Controller Placement. IEEE Wirel. Commun. 2019, 26, 72–79. [Google Scholar] [CrossRef]
- Schütz, G.; Martins, J. A comprehensive approach for optimizing controller placement in Software-Defined Networks. Comput. Commun. 2020, 159, 198–205. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, Z.; Chen, X.; Fang, Y. Throughput Maximization for Multiedge Multiuser Edge Computing Systems. IEEE Internet Things J. 2022, 9, 68–79. [Google Scholar] [CrossRef]
- Ouamri, M.A.; Barb, G.; Singh, D.; Alexa, F. Load Balancing Optimization in Software-Defined Wide Area Networking (SD-WAN) using Deep Reinforcement Learning. In Proceedings of the 2022 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 10–11 November 2022; pp. 1–6. [Google Scholar]
- Alqahtani, A.S. Performance computation and implementation of distributed controllers for reliable software-defined networks. J. Supercomput. 2021, 77, 12790–12800. [Google Scholar] [CrossRef]
- Xu, C.-M.; Zhang, J.-S.; Kong, L.-Q.; Jin, X.-B.; Kong, J.-L.; Bai, Y.-T.; Su, T.-L.; Ma, H.-J.; Chakrabarti, P. Prediction Model of Wastewater Pollutant Indicators Based on Combined Normalized Codec. Mathematics 2022, 10, 4283. [Google Scholar] [CrossRef]
- Barrett, T.; Clements, W.; Foerster, J.; Lvovsky, A. Exploratory combinatorial optimization with reinforcement learning. Proc. AAAI Conf. Artif. Intell. 2020, 34, 3243–3250. Available online: https://ojs.aaai.org/index.php/AAAI/article/view/5723 (accessed on 1 October 2022). [CrossRef]
- Csereoka, P.; Roman, B.-I.; Micea, M.V.; Popa, C.-A. Novel Reinforcement Learning Research Platform for Role-Playing Games. Mathematics 2022, 10, 4363. [Google Scholar] [CrossRef]
- Knight, S.; Nguyen, H.X.; Falkner, N.; Bowden, R.; Roughan, M. The internet topology zoo. IEEE J. Sel. Areas Commun. 2011, 29, 1765–1775. [Google Scholar] [CrossRef]
- Masatu, E.M.; Sinde, R.; Sam, A. Development and Testing of Road Signs Alert System Using a Smart Mobile Phone. J. Adv. Transp. 2022, 2022, 5829607. [Google Scholar] [CrossRef]
- Quemelli, M.B.; Brando, A.S. Handling and pushing objects using unmanned guided vehicles. Robot. Comput.-Integr. Manuf. 2020, 63, 101913. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Hierarchical Control Plane | DRL | Consider Node Variability | Consider Control Reliability |
|---|---|---|---|---|
| Hou et al. [7] | Yes | No | No | No |
| Wu et al. [11] | No | Yes | No | No |
| Li et al. [10] | Yes | Yes | No | Yes |
| This paper | Yes | Yes | Yes | Yes |
| Notation | Description |
|---|---|
| V | the set of nodes |
| the node i in the network | |
| N | the maximum number of nodes |
| E | the set of edges between nodes |
| A | the set of area controllers |
| Y | the number of area controllers |
| the area controller j | |
| the intermediate node k on the path, which is a switch | |
| the propagation delay between node a and node b | |
| the transmission delay between node a and node b | |
| the queuing time of data in switch a | |
| the processing time of data in the switch a | |
| the transmission delay between node a and node b, and node a and node b are wirelessly connected | |
| the transmission delay between node a and node b, and node a and node b are wired connected | |
| the transmission rate between node a and node b | |
| the load of the area controller | |
| the load difference of the area controllers | |
| the control reliability of controller a | |
| the maximum delay from the mobile device to the area controller | |
| the load difference of the area controllers | |
| the mean value of control reliability of all area controllers | |
| the control reliability of the root controller | |
| the maximum delay from all area controllers to the root controller |
| Parameter | Value |
|---|---|
| the number of nodes | 51 |
| the number of edges | 64 |
| 0.8 | |
| 0.1 | |
| 0.1 | |
| 0.3 | |
| 0.7 | |
| 100 | |
| 50 | |
| 13 | |
| 11 |
| Time | Item | Busy Access Point | Ordinary Access Point | Temporary Access Point |
|---|---|---|---|---|
| 00:00–8:00 | Mobile devices | (280,80) | (142,39) | (0,0) |
| Network requests | (1213,277) | (389,111) | (0,0) | |
| 8:05–11:00 | Mobile devices | (1266,396) | (721,177) | (706,128) |
| Network requests | (3881,964) | (2157,699) | (2087,595) | |
| 11:05–14:00 | Mobile devices | (1000,309) | (513,154) | (0,0) |
| Network requests | (3037,673) | (1458,355) | (0,0) | |
| 14:05–17:00 | Mobile devices | (1781,515) | (785,215) | (796,265) |
| Network requests | (5502,1594) | (2585,745) | (2328,584) | |
| 17:05–19:00 | Mobile devices | (1244,321) | (500,165) | (0,0) |
| Network requests | (3479,1132) | (1435,451) | (0,0) | |
| 19:05–21:00 | Mobile devices | (1655,391) | (600,192) | (677,214) |
| Network requests | (4779,1180) | (1741,552) | (2055,520) | |
| 21:05–23:55 | Mobile devices | (501,103) | (150,48) | (0,0) |
| Network requests | (1488,452) | (446,141) | (0,0) |
| Time | Between Busy and Busy | Between Busy and Ordinary | Between Ordinary and Ordinary |
|---|---|---|---|
| 00:00–8:00 | 250–350 | 120–220 | 40–80 |
| 8:05–11:00 | 800–850 | 600–650 | 200–350 |
| 11:05–14:00 | 600–700 | 450–550 | 150–250 |
| 14:05–17:00 | 800–1000 | 600–800 | 200–500 |
| 17:05–19:00 | 700–800 | 500–600 | 200–300 |
| 19:05–21:00 | 800–900 | 600–700 | 200–400 |
| 21:05–23:55 | 300–400 | 150–250 | 50–100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Xu, C.; Li, B. Multi-Agent Deep Q-Network Based Dynamic Controller Placement for Node Variable Software-Defined Mobile Edge-Cloud Computing Networks. Mathematics 2023, 11, 1247. https://doi.org/10.3390/math11051247
Xu C, Xu C, Li B. Multi-Agent Deep Q-Network Based Dynamic Controller Placement for Node Variable Software-Defined Mobile Edge-Cloud Computing Networks. Mathematics. 2023; 11(5):1247. https://doi.org/10.3390/math11051247
Chicago/Turabian StyleXu, Chenglin, Cheng Xu, and Bo Li. 2023. "Multi-Agent Deep Q-Network Based Dynamic Controller Placement for Node Variable Software-Defined Mobile Edge-Cloud Computing Networks" Mathematics 11, no. 5: 1247. https://doi.org/10.3390/math11051247
APA StyleXu, C., Xu, C., & Li, B. (2023). Multi-Agent Deep Q-Network Based Dynamic Controller Placement for Node Variable Software-Defined Mobile Edge-Cloud Computing Networks. Mathematics, 11(5), 1247. https://doi.org/10.3390/math11051247