1.1. Background
In the past 60 years, mankind has been actively exploring and developing near-Earth space through rockets, satellites, and other kinds of spacecraft. A by-product of this activity is space debris, which is structural fragments, the upper stages of rockets, or even the abandoned satellite itself after completing its mission [
1]. The debris can stay in orbit for decades or even hundreds of years, posing a serious threat to both functioning and newly launched satellites and spacecraft. Kessler and Cour-Palais [
2] put forward the “Kessler syndrome”, which attracted widespread attention. The theory pointed out a dramatic situation of space debris, when the collision of two large objects of space debris causes an avalanche-like cascade of mutual collisions, ultimately leading to the formation of a cloud of debris around the Earth [
3]. Research shows that at least five large space debris need to be removed every year to stabilize the space environment [
4,
5].
Realizing the huge danger posed by space debris, scholars have proposed the concept of Active Space Debris Removal (ADR). Various approaches have been developed to remove space debris: contact approaches, such as through robotic arm [
6,
7], nets [
8,
9], tethered space robots [
10,
11], and harpoon [
12,
13,
14], and contactless approaches, such as through ion beam assisted transportation [
15,
16], electrostatic transportation [
17,
18], laser transportation [
19,
20], gravity transportation [
21,
22], and electromagnetic detumbling [
23,
24]. However, due to the complexity of space mission operations and the scarcity of on-orbit servicing spacecraft resources, the implementation of the active space debris removal mission requires continuous and systematic planning measures.
Active space debris removal mission planning problem is a complex optimization problem, which is used to determine the sequence of debris removal, rendezvous time, and transfer trajectory between two adjacent debris removal processes.
The combinatorial optimization characteristics of the problem are similar to those of the traveling salesman problem (TSP) [
25] to a degree, but compared with it, ADR mission planning problem shows greater complexity and difficulty in solving. This can be summarized in two aspects: first, the calculation of the optimal transfer velocity increment between two debris is much more complicated than the calculation of the Euclidean distance between two cities with a fixed location, and it is particularly time-consuming; second, because space debris runs in different orbits and its spatial location changes with time, ADR mission planning problem has a larger search space than the classic TSP problem of the same scale. Thus, effective and efficient planning methods are of crucial significance for the completion of the ADR missions.
1.2. Literature Review
At present, the methods for solving active space debris removal mission planning problem can be divided into three main categories: explicit enumeration methods, implicit enumeration methods, and meta-heuristic methods [
26].
- (1)
Explicit enumeration methods
The explicit enumeration methods are committed to finding the exact global optimal solution by enumerating all possible combinations. This method is only applicable when the search space is very small. Zuiani and Vasile [
27] presented a simplified ADR mission planning scenario of five space debris under the preliminary design of low-thrust, many-revolution transfers. According to different propulsion systems, Braun et al. [
28] proposed four space debris removal modes and the best removal sequence of four to six debris is obtained through the brute-force approach. However, when the number of debris is larger than 10, the considerable calculation time of enumerating all feasible combinations is unacceptable.
- (2)
Implicit enumeration methods
Implicit enumeration methods are committed to explore the optimization process by finding those sequences with high probabilities of becoming the optimal solution and pruning other sequences [
29]. The tree search algorithm can be regarded as a typical implicit enumeration method, and the tree nodes represent the space debris involved in orbital transfers. The pruning strategy is crucial to the tree search algorithm, because excessive pruning may lose the optimal solution and inadequate pruning will increase the computational burden [
26]. Li et al. [
30] proposed a beam search algorithm with the pruning strategy, in which only the first beam width’s number of nodes was expanded for the next level, and the others were abandoned. Branch and bound is another effective pruning strategy. Olympio and Frouvelle [
31] studied a space debris removal mission in solar synchronous orbit with
perturbation considered, and designed the branch and prune algorithm with a pruning strategy to accelerate the removal sequence search process. Barea et al. [
32] divided the ADR mission planning problem into two layers: the upper layer constructed a linear integer model, and the lower layer constructed a nonlinear mixed integer model and applied the branch and bound algorithm to search the best removal sequence. Cerf [
26] used the branch and bound algorithm to optimize the debris removal sequence and transfer trajectory to obtain a optimal debris removal scheme with the minimum total propellant consumption. Further considering the mission completion time, Madakat et al. [
33] modeled the problem as a multi-objective time-dependent traveling salesman problem (TDTSP) with the objective of minimizing the total mission time and total propellant consumption, and adopted the branch and bound algorithm to find the optimal solution for low-Earth-orbit(LEO) space debris removal. Olive et al. [
34] further built the TOPAS platform (Tool for Optimal Planning of ADR Sequence) based on the branch and bound algorithm, which was applicable to complex ADR scenarios with up to 10 space debris.
However, in most of the cases mentioned above, still only small amount of space debris removal is scheduled. When it comes to cases of large scale, implicit enumeration methods may not be efficient and a suitable approach for ADR mission planning of a complicated characteristic of mixed integer programming is required.
- (3)
Meta-heuristic methods
The meta-heuristic methods possess a great potential for finding the near-optimal solution within an acceptable time, and provide another idea for solving the ADR mission planning problem. In recent research, genetic algorithm (GA) [
35], simulated annealing (SA) [
36], Physarum Algorithm [
37,
38], particle swarm optimization (PSO) [
39], and ant colony optimization (ACO) [
40] have been applied to schedule debris removal missions.
Murakami and Hokamoto [
41] proposed two transfer trajectory selection rules to simplify the transfer trajectory optimization problem, and used GA by encoding the removal sequence and the transfer time into the chromosome together. Liu et al. [
42] was devoted to developing a preliminary plan for a multi-nanosatellite active debris removal platform (MnADRP) for LEO missions and a dynamic multi-objective TSP scheme was proposed in which three optimization objectives, i.e., the debris removal priority, the MnADRP orbital transfer energy, and the number of required nanosatellites were modeled, respectively. Chen et al. [
43] proposed a GA-based three-stage removal strategy for space debris: the first stage to develop the mission scenario with multiple spacecraft including one main spacecraft and some following spacecraft for debris removal missions; the second stage to define the fuel, time, and the quantity of the following spacecraft as the constraints; and the third stage to establish the mathematical model taking the minimum fuel consumption as the optimal objective. Missel and Mortari [
44] studied the Space Sweeper with Sling-Sat (4S) mission of debris removal and optimized the combinatory selecting of the debris interaction order, ejection velocities, and sequence timing by an evolutionary algorithm. Federici et al. [
3] designed an effective coding and mutation operator, and applied SA to optimize the removal sequence and the rendezvous time of ADR missions, which could accomplish the removal mission planning for 20 space debris. Medioni et al. [
45] performed optimization using SA and a tool to classify the targets in groups gathered by similarities of orbital elements, with the objective for each mission being not to exceed a total
km/s, and for a mission time lower than 3 years, which was proposed for removal target selection. Carlo et al. [
46] proposed TSP and VRP(Vehicle Routing Problem) modeling strategies, respectively, for LEO ADR missions and designed a bio-inspired incremental automatic planning and scheduling discrete optimization algorithm based on the Physarum algorithm. Oriented to the geostationary-orbit(GEO) debris removal mission planning problem, Jing et al. [
47] studied three key sub-problems: mission allocation, sequence planning, and trajectory transfer planning, which were modeled by a hybrid optimal control model and solved by an improved multi-objective PSO. Mohammadi-Dehabadi et al. [
48] designed a multi-objective PSO algorithm for minimizing the total propellant consumption and mission completion time and, through their experiments, it was shown that the initial orbital elements of the spacecraft had a great impact on the propellant consumption and time cost for ADR missions. Stuart et al. [
49] used ACO to generate a preliminary debris removal sequence and to determine the number of spacecrafts required to clear a debris set, and re-planned the preliminary scheme by multi-agent coordination via auctions. Shen et al. [
50] used ACO to optimize the sequence planning model for the dynamic ADR mission planning problem under
perturbation, and successfully obtained the optimal removal sequence of 10 debris. Zhang et al. [
51] proposed an improved ACO with the inner-outer operator, whose effectiveness to select the optimal removal targets from a large set of debris (up to 2000) was proved by their experiments. Li and Baoyin [
52] combined the advantage of an evolutionary algorithm and population intelligence algorithm, took ACO as the framework and added the GA operator, and developed the evolutionary elitist club algorithm (EECA) to optimize the multi-debris removal mission. Zhu [
53] designed the dynamic sequence planning ant colony optimization algorithm based on the framework of the ant colony system, introduced the concept of a pheromone tensor to characterize the dynamic transfer preference between debris targets, and proposed a step-by-step rendezvous sequence planning strategy based on the time discretization method. Unlike the methods described in refs. [
52,
53], which added the time dimension into the pheromone matrix of the ACO by discretizing and fitting time, Zhang et al. [
29] directly put the timeline particles at a certain moment of the corresponding timeline, but not at a series of discrete time points and solved the time-dependent characteristics of the ADR mission planning problem through a new structure called the Timeline Club.
As can be seen from the above, the literature may fall into three main drawbacks. First, most of the ADR mission merely involved several debris and did not discuss the situation with large-scale debris. Second, in order to simplify the planning problem, some studies adopted a static and non-time-varying transfer trajectory model, which was far from the actual situation. Last but not the least, a hierarchical optimization strategy was often adopted to decompose the ADR mission planning problem where the debris removal sequence and transfer trajectory were optimized separately. Consequently, the final solution may not be optimal without a global optimization.
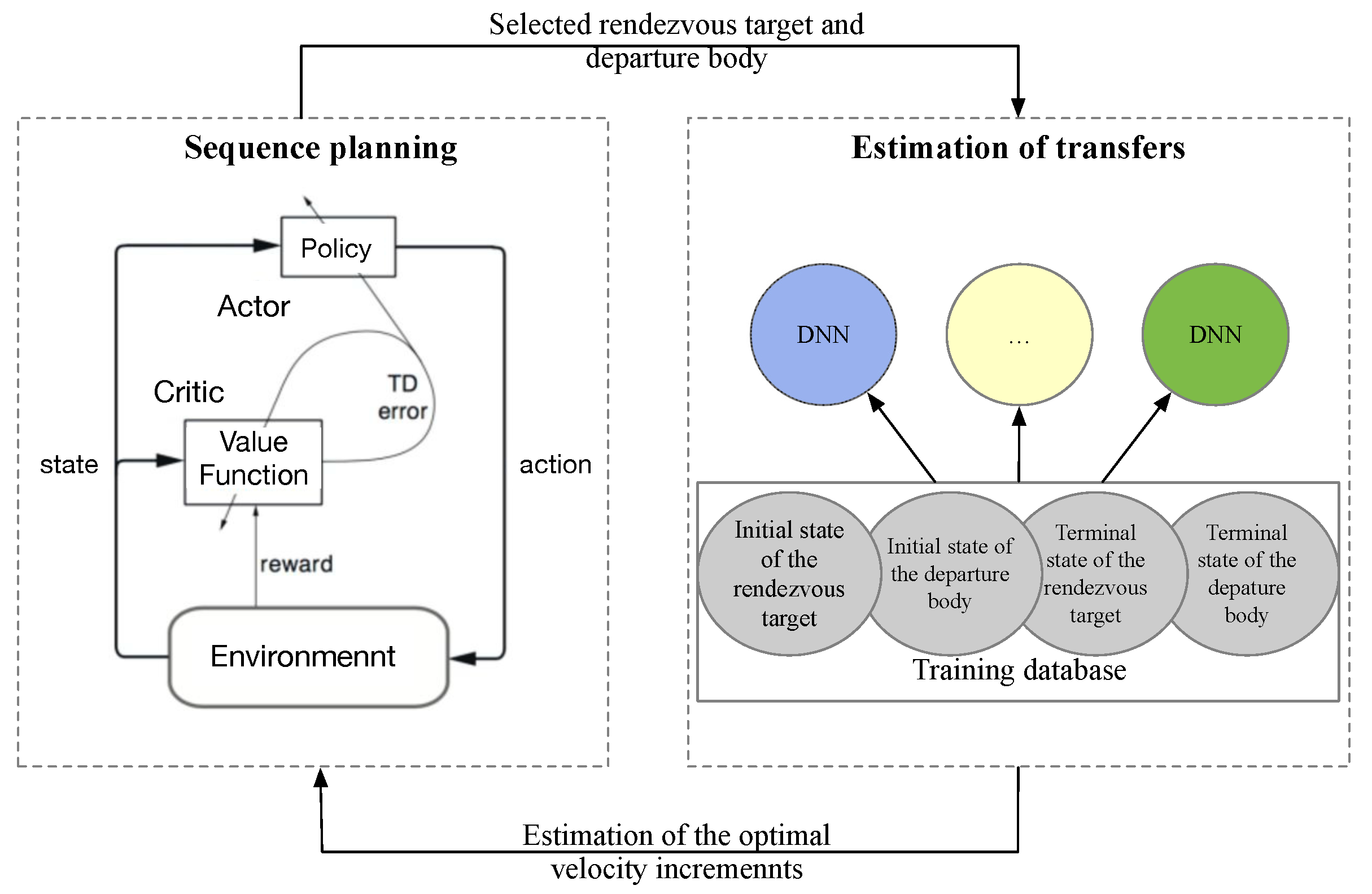
Therefore, this paper develops two novel methods to confront the deficiencies above, including a method for estimating the optimal velocity increments of perturbed multiple-impulse rendezvous for actual transfer trajectory planning and a method for optimizing the sequence of debris removal and transfer trajectory simultaneously.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}