1. Introduction
Infectious diseases have become the greatest enemy of human health. When an infectious disease appears and prevails in an area, the primary task is to make every effort to prevent the spread of the disease. Vaccination is one of the important preventive measures. Through vaccination, smallpox was eliminated in the world at the end of the 1970s. This is a great victory for human beings in the fight against infectious diseases, an important milestone in the history of preventive medicine, and a great achievement of vaccination for human beings. In mathematical epidemiology, the control and eradication of infectious diseases are urgent problems, and have greatly attracted the interest of researchers in many fields. Now scholars have proposed and extensively discussed various types of optimizing models and their influencing factors, such as vaccination, time delay, impulse, media reports, etc. [
1,
2,
3,
4]. However, as a disease progresses, a virus can mutate as it spreads, allowing the disease to spiral out of control. Cai et al. analyzed the stability of the infectious disease model of virus mutation of inoculation, but only considered the condition that the inoculated individual was completely effective against the virus at a certain stage [
5,
6]. Baba and Bilgen et al. considered the problem of double-inoculation infectious diseases, which had an adverse effect on the two viruses respectively, but did not consider the conversion between patients infected with the two viruses [
7,
8]. Therefore, on the basis of the research on the problem of virus mutated infectious disease, considering the situation of two kinds of vaccination for susceptible people, a kind of virus mutated infectious disease model with double vaccination was proposed.
Taking into account the important role of vaccination in preventing the occurrence of infectious diseases, we assume that the first type of vaccinated people are fully immune to the premutation virus and partially resistant to the post mutation virus, whereas the second are fully immune to the postmutation virus and partially resistant to the premutation virus. In addition, the two types of the infected are infectious, and the disease is not fatal before the virus mutation, whereas it is fatal after the virus mutation. Based on the above assumptions, a model was established as follows:
where
and
, respectively, represent the number at the time
t of the susceptible, those vaccinated to the first and to the second types of vaccines, the infected before and after virus mutation, and the recovered.
is the input rate of the population.
and
are the infection coefficients, respectively, before and after virus mutation.
a is the natural mortality of the population.
and
are the vaccination rates of the first and the second vaccines.
and
are the infection rates of the infected with the first type of people vaccinated after virus mutation, and the second before virus mutation, respectively.
and
are the recovery rates of the infected, respectively, before and after the virus mutation.
is the ratio of the infected before the virus mutation to the infected after virus mutation in number.
is the mortality rate of the infected after virus mutation. In addition,
.
According to the biological significance of the model, it is assumed that all parameters are positive, and the dynamic behavior of population
R does not affect other populations. Thus, the following model is considered:
Model (
2) has a basic reproduction number
, where
it also has a disease-free equilibrium
Moreover, when
, model (
2) has a boundary equilibrium point
where the disease will disappear before the virus mutation, and after the virus mutation it will spread; when
and
, both before and after the virus mutates, model (
2) has an endemic disease balance point
, where
On the other hand, environmental change has a key impact on the development of epidemics [
9]. For disease transmission, because of the unpredictability of human contact, the growth and spread of epidemics are essentially random, so population numbers are constantly disturbed [
10,
11]. Therefore, in epidemic dynamics, stochastic differential equation
models may be a more appropriate approach to modeling epidemics in many situations. Many real stochastic epidemic models can be derived based on their deterministic formulas [
9,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23]. Assuming that the coefficients of model (
2) are affected by random noise that can be represented by Brownian motion, model (
2) becomes:
where
represents the intensities of the white noises, and
are mutually independent standard Brownian motions. However, the groups
and
are usually subject to the same random factors such as temperature, humidity, etc., in reality. As a result, it is more reasonable to assume that the five classes of random perturbance noises are uncorrelated. If we set
, then model (
3) becomes:
Let be a complete probability space with the filtration satisfying the usual condition (i.e., is increasing and right continuous whereas contains all -null sets). Throughout this paper, , and are denoted.
First, we prove the global existence and uniqueness of the positive solution of model (
4). Similar to a deterministic model, we introduce a threshold value
, able to be calculated from the coefficients. We show that if
,
will be extinct with probability 1, and
will weakly converge to their unique invariant probability measures
, respectively. If
, then coexistence occurs, and all positive solutions of model (
4) are converged to the unique variational probability measure
in the total variational norm.
Most of the existing studies use the method of constructing the Lyapunov function to prove the existence of the stationary distribution of the solution of model (
4). However, this method is not applicable to all models. In this paper, the definition method applicable to more models is used to prove the stationary distribution [
24,
25,
26,
27]. Moreover, most of the stochastic infectious disease models studied now are second order or third order. Therefore, in order to depict infectious diseases more accurately, we have established a fifth-order model–a double inoculation and random infectious disease model of spontaneous virus mutation, considering two kinds of vaccination for susceptible people on the basis of the research on infectious diseases of virus mutation.
The main structure of this paper is as follows: In
Section 2 we prove the global existence and uniqueness of the positive solution of model (
4). In
Section 3 and
Section 4, we are devoted to the proof of extinction and coexistence, respectively. In
Section 5, we provide an example to support our findings. In
Section 6, the main results are discussed and summarized briefly.
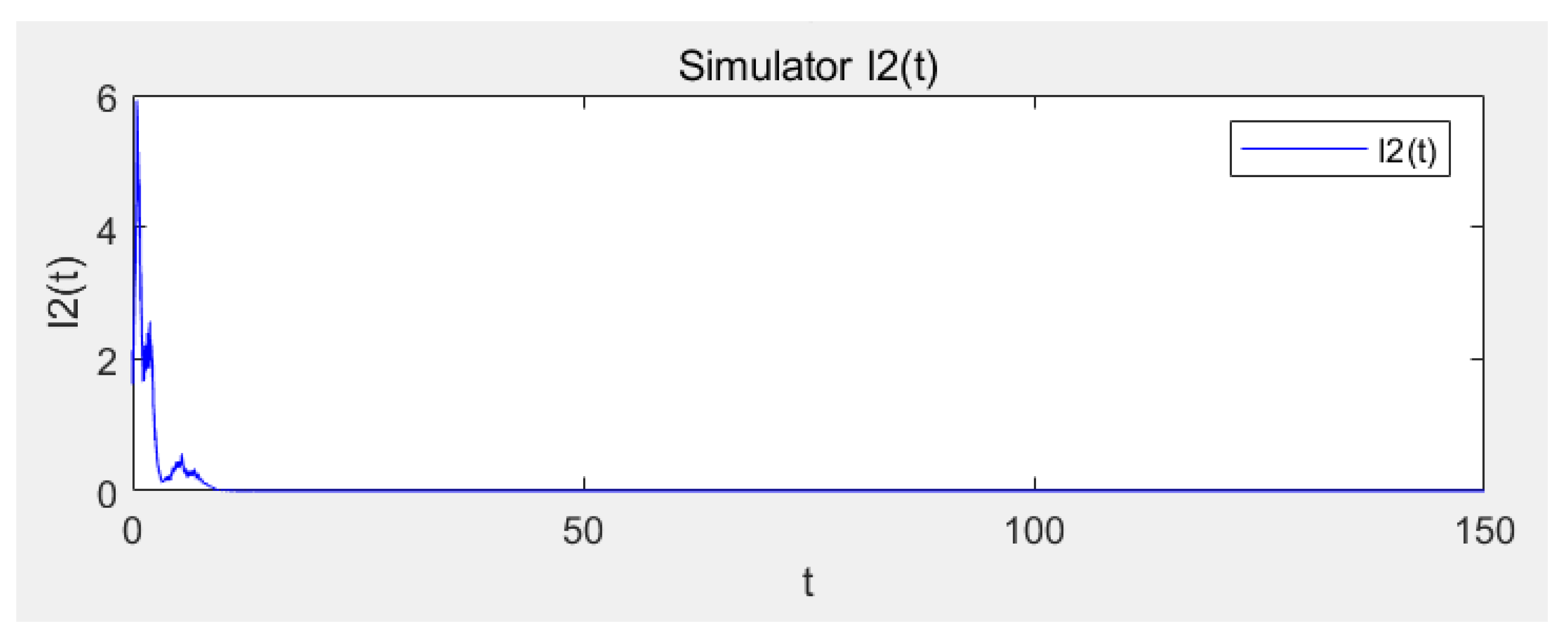
3. Extinction of Disease
For the infectious disease model, we always care about whether the disease will disappear. In this section, we first define a threshold value
, and the stochastic extinction of the disease when
is then proved in the model (
4).
To obtain further properties of the solution, we case on the boundary of the first equation of model (
4):
so we have,
For the given initial value
u, let
be the solution to model (
7). According to the comparison theorem,
. By solving the Fokker–Planck equation, the process
has unique stationary distribution with density
, and by the strong law of large numbers, we have
For other equations of model (
4), we use the same method to obtain:
we have
then similarly
therefore
where
have the same definition as above.
To proceed, we define the threshold as follows:
where
.
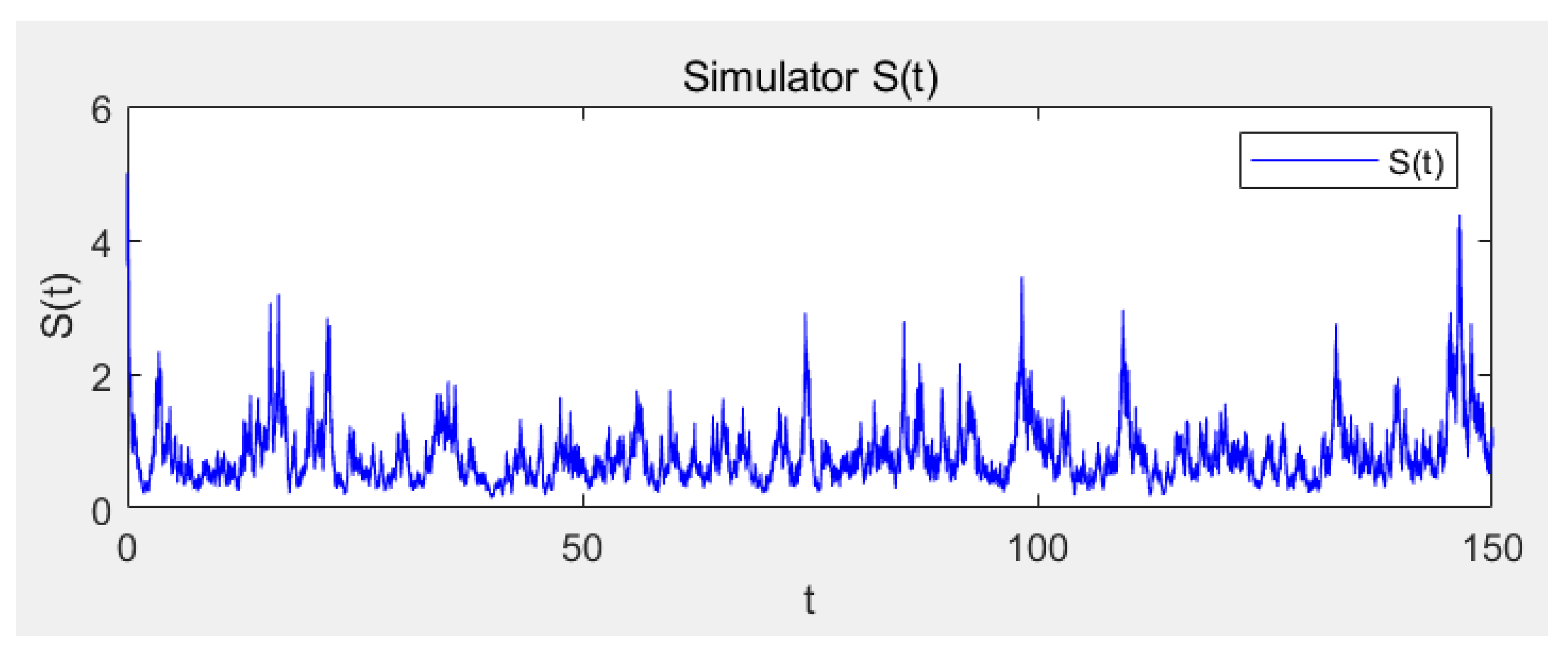
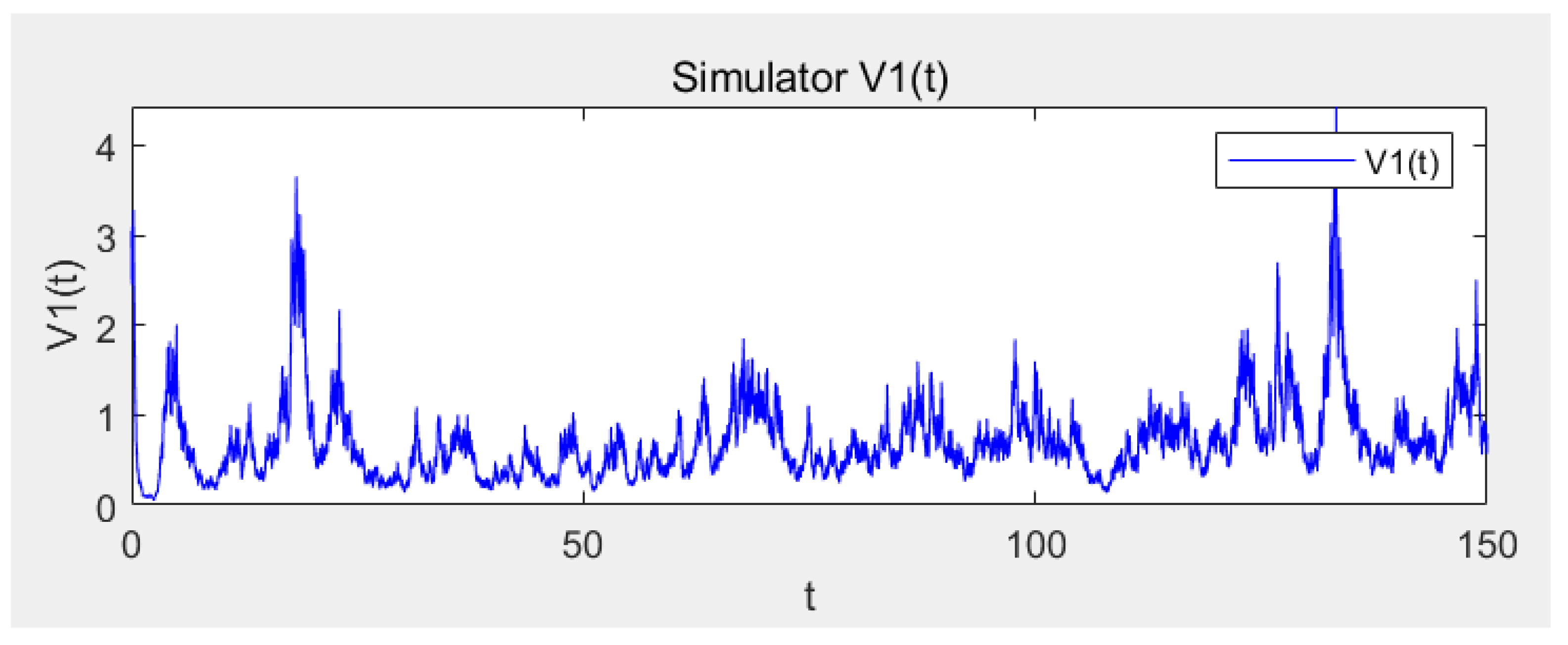
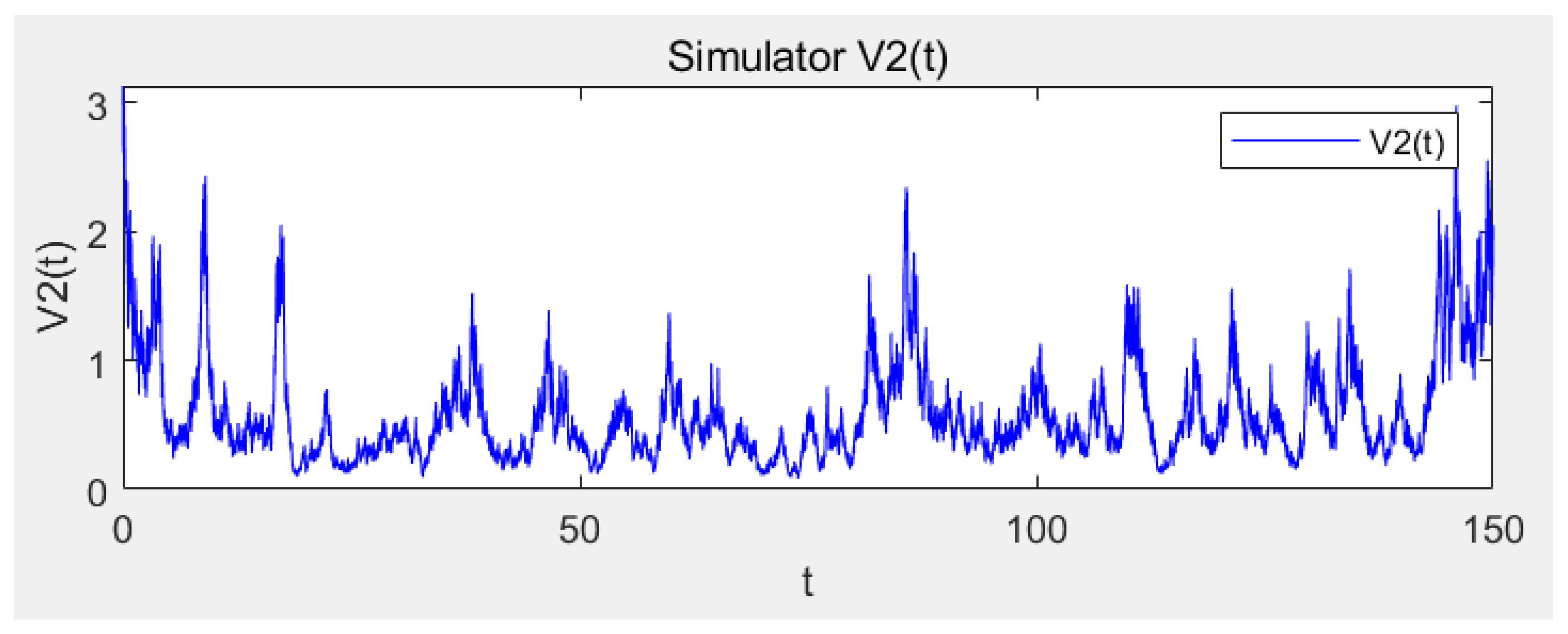
Theorem 2. If , then for any initial value , a.s., and the distribution of , converge weakly to the unique invariant probability measures with the densities , respectively.
Proof of Theorem 2. Considering a Lyapunov function
, defined by
. Applying
formula to
, we have
where
.
Then integral from 0 to
t at both ends of inequality
It finally follows from (
11) by dividing
t on the both sides and let
that,
Hence,
converges almost surely to 0 at an exponential rate.
For any
, it follows from (
12) that there exists
such that
where
- Case 1.
converges weakly to the unique invariant probability measure with the density .
We can choose that
satisfying
. Let
be the solution of (
7). Supposing
, then we can obtain
by the comparison theorem. In view of the
formula, for almost all
we have
where
. As a result, for any
we have
Now let us make an equivalent statement, that is, the distribution of
is weakly convergent to
is equivalent to the distribution of
is weakly convergent to
. By the Portmanteau theorem, it is sufficient to prove that for any
satisfying
and
, we have
Because the diffusion of model (
4) is non-degenerate, the distribution of
converges weakly to
as
. Therefore
such that
Applying (
13) and (
14) to (
15), we can obtain
- Case 2.
converges weakly to the unique invariant probability measure with the density .
Similar to Case 1, we can choose
satisfying
. Then, we can get
As a result, for any
we have
then we have
Thus
such that
Applying (
16) and (
17) to (
18), we can obtain
- Case 3.
converges weakly to the unique invariant probability measure with the density .
The proof method is the same as above. Since is taken arbitrarily, we obtain the desired conclusion. The proof is completed. □
4. Stationary Distribution
Now we focus on the case
. Let
be the transition probability of
. Because the diffusion of model (
4) is degenerate, i.e.,
, we have to change the model to Stratonovich’s form in order to obtain properties of
,
where
Let
to proceed, we first recall the notion of Lie bracket. If
and
are two vector fields on
then the Lie bracket
is a vector field given by
where
Using to represent the Lie algebra generated by , and the ideal in generated by B. We have the following theorem.
Theorem 3. The ideal in generated by satisfies dim at every . In other words, the set of vectors spans at every . As a result, the transition probability has smooth density .
Proof of Theorem 3. By direct calculation,
where elements in matrices
E and
F are shown in
Appendix A.
Consequently,
which means that
are linearly independent. As a result,
span
for all
. Theorem 3 is proved. □
In view of the Hormander Theorem, the transition probability function
has a density
and
. Now we check the kernel
k is positive. A fixed point
and a function
, considering the following model of integral equations:
where
Let be the derivative of the function h. If for some the derivative has rank 5, then for , , , , and . The derivative can be found by means of the perturbation method for ODEs.
Namely, let
where
is the Jacobian of
and let
, for
, be a matrix function such that
and
then
.
Theorem 4. For any and , there exists such that .
Proof of Theorem 4. First, we check that the rank of
is 5. Let
and
. Since
we obtain
Directly calculated
where elements in matrices
, and
are shown in
Appendix B.
Therefore, it follows that are linearly independent and the derivative has rank 5.
Putting
and
we have an equivalent model of model (
19)
where
For any and suppose that and let .
We choose
with
. It is easy to check that with this control, there is
such that
If
,we can construct
similarly.
By choosing
to be sufficiently large, for any
, there is a
such that
. This property, combined with (
20), implies the existence of a feedback control
and
satisfying that for any
we have
This completes the proof. □
We construct a function
satisfying that
for some petite set
K and some
. If there exists a measure
with
and the probability distribution
is concentrated on
so that for any
then set
K is called to be petite with respect to the Markov chain
. We must also prove that Markov chain
is irreducible and aperiodic. The definitions and properties of irreducible sets, aperiodic sets, and small sets refer to [
28] or [
29]. The estimation of convergence rate is divided into the following theorems and propositions.
Theorem 5. Let .There exists positive constants such that Proof of Theorem 5. Considering the Lyapunov function
. By directly calculating the differential operator
related to model (
4), we obtain
By Young’s inequality, we have
Choose a number
satisfying
From (
21) and (
22),we obtain
As a result,
For
, define the stopping time
, then
formula and (
23) yield that
By letting
, we obtain from Fatou’s lemma that
The Theorem 5 is proved. □
Theorem 6. For any and we havewhere . Proof of Theorem 6. We have
where
, thus
This implies that
taking expectation both sides and using the estimate above, we obtain
Similarly, we have
where
. The Theorem 6 is proved. □
Choose
satisfying
Theorem 7. For and H chosen as above, there is and such thatfor all . Proof of Theorem 7. Let
be the solution with initial value
to
Calculated,
In view of the strong law of large numbers for martingales,
. Hence, there exists
, such that
and
where
. By the uniqueness of solutions to (
26), we obtain
Similar to (
8)–(
10), it can be shown that there exists
,
where
.
Observe also that
which we have from the comparison theorem. From (
27)–(
30) we can be show that with probability greater than
, for all
,
The proof is completed. □
Proposition 1. Assuming . Let , H so large and . There exists independent of , such thatfor any . Proof of Proposition 1. First, considering
, we have
where
In
we have
thus for any
,
as a result,
which imply that
In
, we have from Theorem 6 that
adding (
31) and (
32) side by side, we obtain
in view of (
24) we deduce
Now, for
and
, we have form Theorem 6 that
Letting
sufficiently large, such that
,
, then the proof is completed. □
Proposition 2. Assuming . There exist such thatfor . Proof of Proposition 2. First, considering
. Defined the stopping time
Let
By the exponential martingale inequality,
Let
If
, we have
similarly,
If
, therefore
Squaring and then multiplying by
and then taking expectation both sides, we yield
If
, then
similarly,
, we have
as a result,
hence,
Let
and
. In view of Proposition and the strong Markov property, we can estimate the conditional expectation
As a result,
in view of Theorem 6,
adding side by side (
33)–(
35), for some
, we have
We note that, if
, then
therefore, it follows from Theorem 6 that
Let
, for any
;
, we have
The proof is completed. □
Theorem 8. Let , there exists an invariant probability measure such that
- (a)
,
- (b)
,
where is the total variation norm, is any positive number and is the transition probability of .
Proof of Theorem 8. By virtue of Theorem 7, there are
satisfying
Let
in view of Proposition 1, Proposition 2, and (
26), there is a compact set
satisfying
Applying (
37) and Theorem 3.6 in [
30], we obtain that
for some invariant probability measure
the Markov chain
,
,
,
. Let
,
. It is shown in the proof of Theorem 3.6 in [
30] that (
37) implies
. In view of [
31], the Markov process
,
,
,
,
has an invariant probability measure
. As a result,
is also an invariant probability measure of the Markov chain
. In light of (
38), we must have
, then,
is an invariant measure of the Markov process
.
In the proofs, we use the function
for the sake of simplicity. In fact, we can treat
for any small
in the same manner. For more details, we can refer to [
24] or [
25]. □


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















