


Finite-Element Method for the Simulation of Lipid Vesicle/Fluid Interactions in a Quasi–Newtonian Fluid Flow


Abstract
:1. Introduction
2. Problem Statement
2.1. Level Set Formulation
2.2. Fluid Constitutive Equations
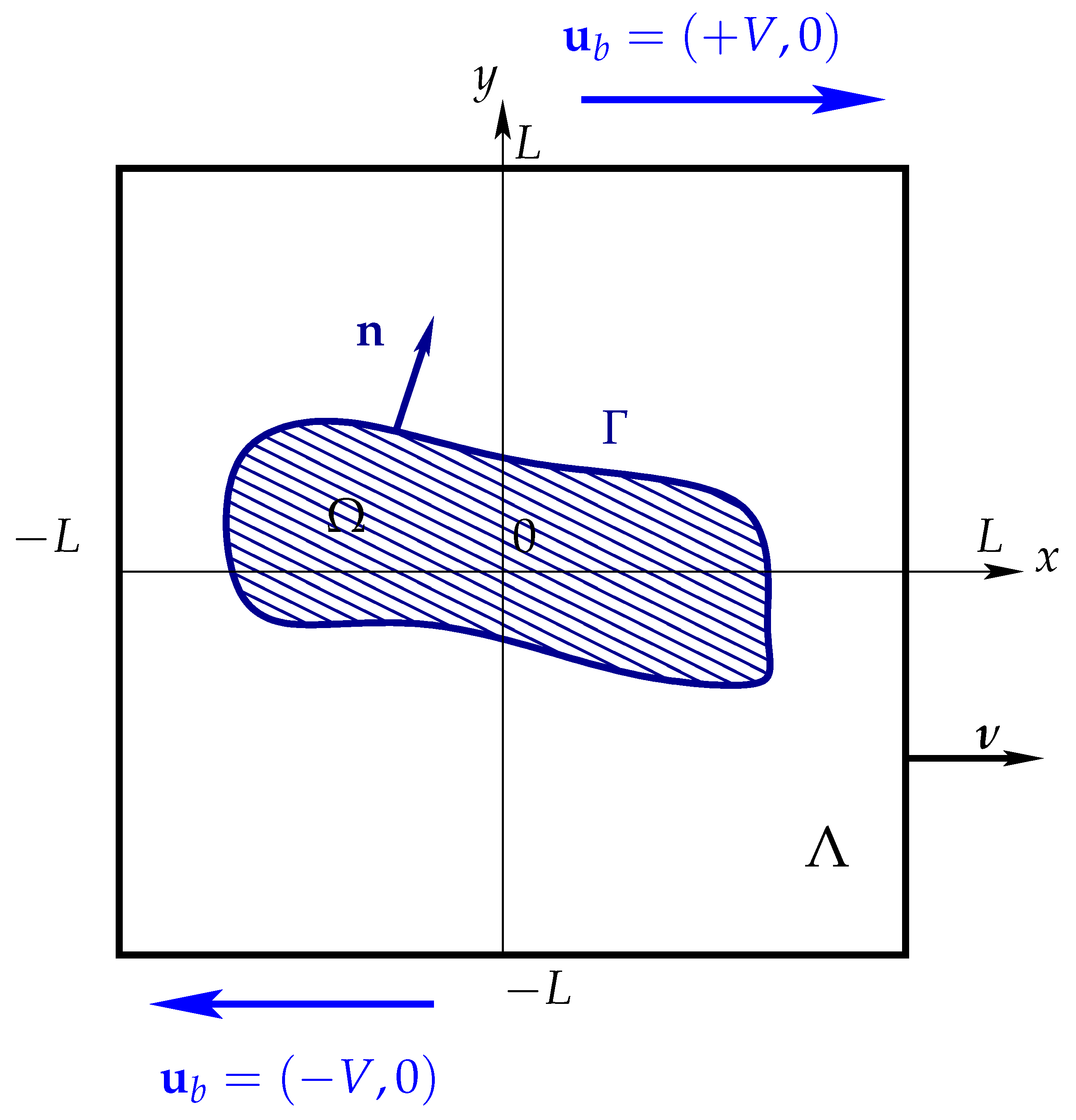
2.3. Statement of the Fluid-Vesicle Interaction Problem
2.4. Panalty Approach
3. Time Discretization
3.1. Error Estimation
3.2. Time-Stepping Strategy
3.3. Overall Algorithm
| Algorithm 1 Fluid/vesicle coupling algorithm |
|
4. Numerical Results and Discussion
4.1. Verification of the Method–Time Convergence
4.2. Level Set Example–Spatial Convergence
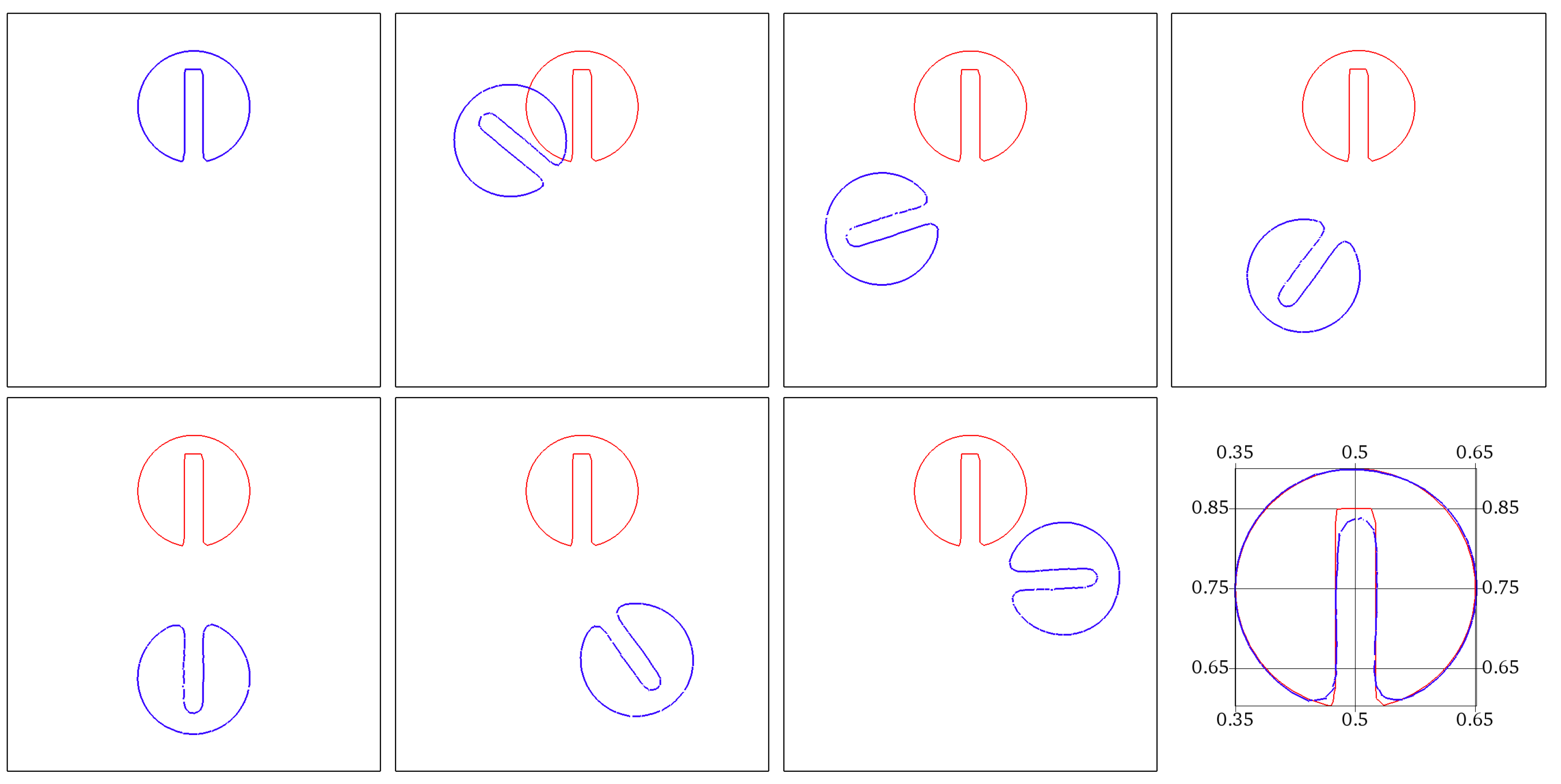
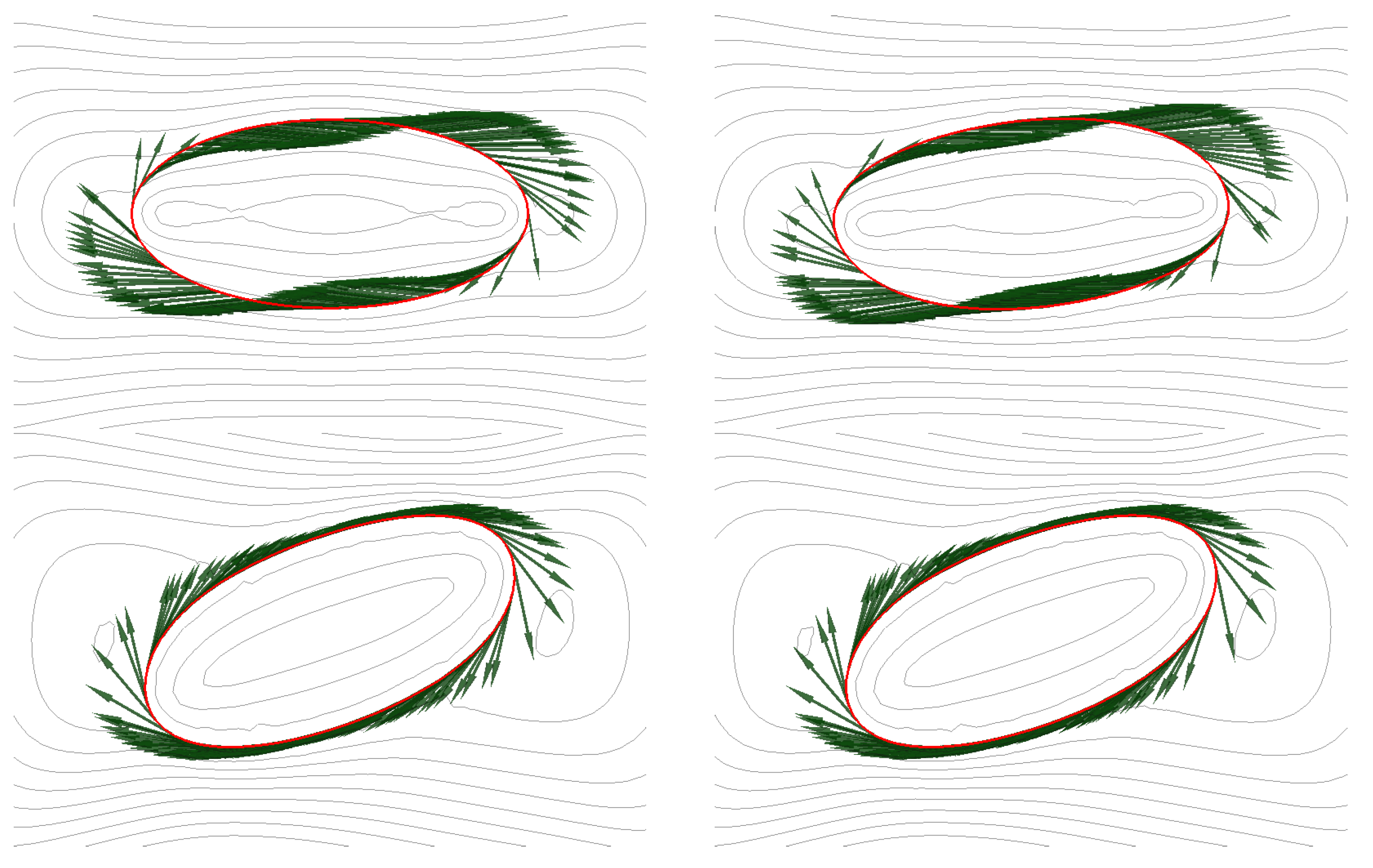
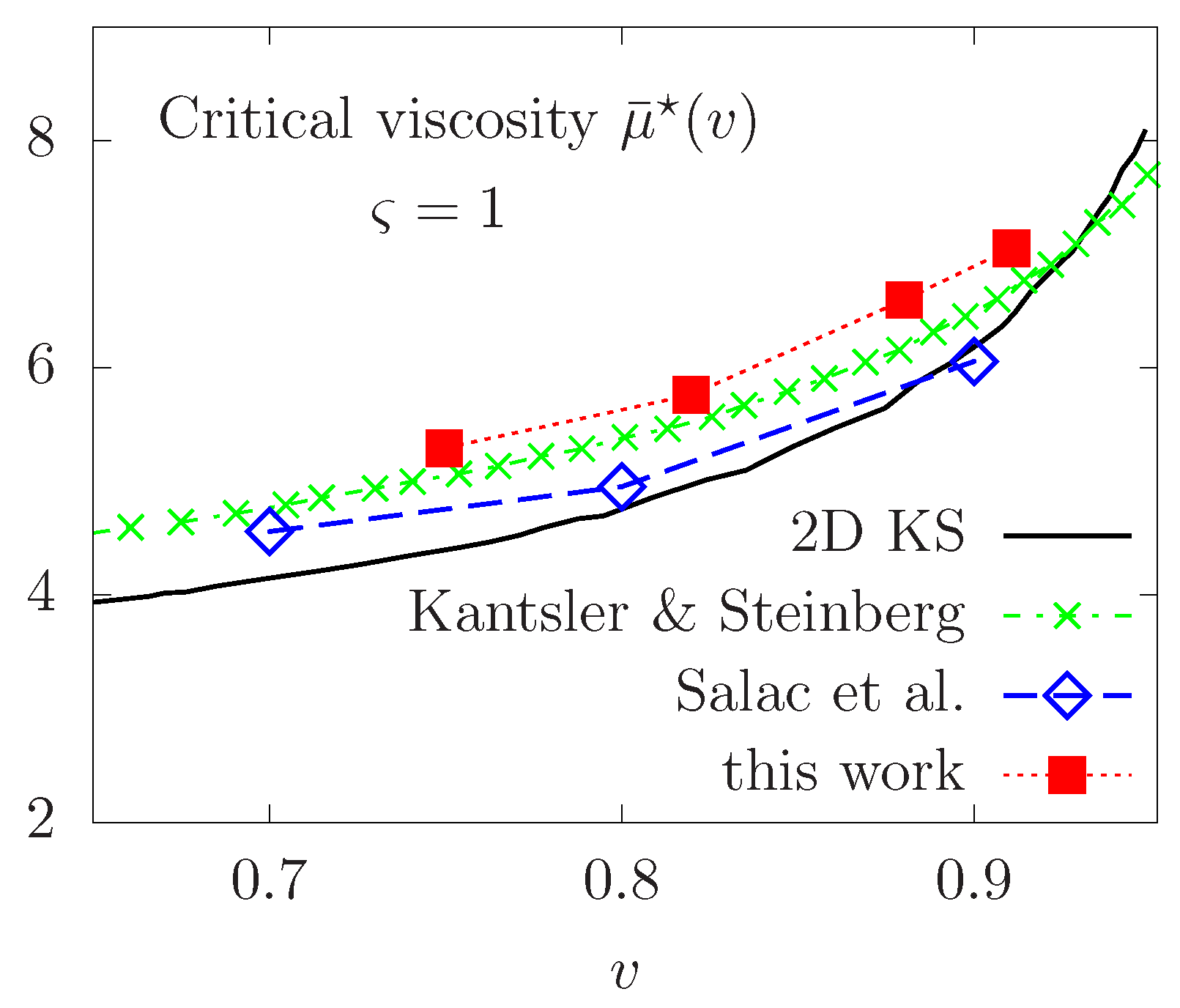
4.3. Vesicle in Linear Shear Flow
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Noyhouzer, T.; L’Homme, C.; Beaulieu, I.; Mazurkiewicz, S.; Kuss, S.; Kraatz, H.B.; Canesi, S.; Mauzeroll, J. Ferrocene-Modified Phospholipid: An Innovative Precursor for Redox-Triggered Drug Delivery Vesicles Selective to Cancer Cells. Langmuir 2016, 32, 4169–4178. [Google Scholar] [CrossRef]
- Ayscough, S.E.; Clifton, L.A.; Skoda, M.W.; Titmuss, S. Suspended phospholipid bilayers: A new biological membrane mimetic. J. Colloid Interface Sci. 2023, 633, 1002–1011. [Google Scholar] [CrossRef] [PubMed]
- Karaz, S.; Senses, E. Liposomes Under Shear: Structure, Dynamics, and Drug Delivery Applications. Adv. NanoBiomed Res. 2023; in press. [Google Scholar] [CrossRef]
- Kwon, O.; Krishnamoorthy, M.; Cho, Y.I.; Sankovic, J.M.; Banerjee, R.K. Effect of Blood Viscosity on Oxygen Transport in Residual Stenosed Artery Following Angioplasty. J. Biomech. Eng. 2008, 130, 011003. [Google Scholar] [CrossRef] [PubMed]
- P, P.C.; Simmonds, M.; Brun, J.; Baskurt, O. Exercise hemorheology: Classical data, recent findings and unresolved issues. Clin. Hemorheol. Microcirc. 2013, 53, 187–199. [Google Scholar] [CrossRef]
- Wajihah, S.A.; Sankar, D. A review on non-Newtonian fluid models for multi-layered blood rheology in constricted arteries. Arch. Appl. Mech. 2023, 1–26. [Google Scholar] [CrossRef]
- Chien, S.; Usami, S.; Dellenback, R.; Gregersen, M. Shear-dependent deformation of erythrocytes in rheology of human blood. Am. J. Physiol. 1970, 219, 136–142. [Google Scholar] [CrossRef]
- Lai, M.C.; Li, Z. A remark on jump conditions for the three-dimensional Navier–Stokes equations involving an immersed moving membrane. Appl. Math. Lett. 2001, 14, 149–154. [Google Scholar] [CrossRef]
- Pozrikidis, C. Numerical simulation of the flow-induced deformation of red blood cells. Ann. Biomed. Eng. 2003, 31, 1194–1205. [Google Scholar] [CrossRef]
- Rahimian, A.; Veerapaneni, S.K.; Biros, G. Dynamic simulation of locally inextensible vesicles suspended in an arbitrary two-dimensional domain, a boundary integral method. J. Comput. Phys. 2010, 229, 6466–6484. [Google Scholar] [CrossRef]
- Boedec, G.; Leonetti, M.; Jaeger, M. 3D vesicle dynamics simulations with a linearly triangulated surface. J. Comput. Phys. 2011, 230, 1020–1034. [Google Scholar] [CrossRef]
- Seol, Y.; Tseng, Y.H.; Kim, Y.; Lai, M.C. An immersed boundary method for simulating Newtonian vesicles in viscoelastic fluid. J. Comput. Phys. 2019, 376, 1009–1027. [Google Scholar] [CrossRef]
- Krüger, T.; Varnik, F.; Raabe, D. Efficient and accurate simulations of deformable particles immersed in a fluid using a combined immersed boundary lattice Boltzmann finite element method. Comput. Math. Appl. 2011, 61, 3485–3505. [Google Scholar] [CrossRef]
- Kaoui, B.; Harting, J.; Misbah, C. Two-dimensional vesicle dynamics under shear flow: Effect of confinement. Phys. Rev. E 2011, 83, 066319. [Google Scholar] [CrossRef]
- Bonito, A.; Nochetto, R.H.; Pauletti, M.S. Parametric FEM for geometric biomembranes. J. Comput. Phys. 2010, 229, 3171–3188. [Google Scholar] [CrossRef]
- Barrett, J.W.; Garcke, H.; Nurnberg, R. Numerical computations of the dynamics of fluidic membranes and vesicles. Phys. Rev. E 2015, 92, 052704. [Google Scholar] [CrossRef] [PubMed]
- Cottet, G.H.; Maitre, E.; Milcent, T. Eulerian formulation and Level-Set models for incompressible fluid–structure interaction. Math. Model. Numer. Anal. 2008, 42, 471–492. [Google Scholar] [CrossRef]
- Laadhari, A.; Saramito, P.; Misbah, C. Computing the dynamics of biomembranes by combining conservative level set and adaptive finite element methods. J. Comput. Phys. 2014, 263, 328–352. [Google Scholar] [CrossRef]
- Doyeux, V.; Guyot, Y.; Chabannes, V.; Prud’homme, C.; Ismail, M. Simulation of two-fluid flows using a finite element/level set method. Application to bubbles and vesicle dynamics. J. Comput. Appl. Math. 2013, 246, 251–259. [Google Scholar] [CrossRef]
- Ismail, M.; Lefebvre-Lepot, A. A necklace model for vesicles simulations in 2D. Int. J. Numer. Meth. Fluids. 2014, 76, 835–854. [Google Scholar] [CrossRef]
- Zhang, T.; Wolgemuth, C.W. A general computational framework for the dynamics of single- and multi-phase vesicles and membranes. J. Comput. Phys. 2022, 450, 110815. [Google Scholar] [CrossRef] [PubMed]
- Du, Q.; Liu, C.; Wang, X. A phase field approach in the numerical study of the elastic bending energy for vesicle membranes. J. Comput. Phys. 2004, 198, 450–468. [Google Scholar] [CrossRef]
- Jamet, D.; Misbah, C. Toward a thermodynamically consistent picture of the phase-field model of vesicles: Curvature energy. Phys. Rev. E 2008, 78, 031902. [Google Scholar] [CrossRef] [PubMed]
- Valizadeh, N.; Rabczuk, T. Isogeometric analysis of hydrodynamics of vesicles using a monolithic phase-field approach. Comput. Methods Appl. Mech. Eng. 2022, 388, 114191. [Google Scholar] [CrossRef]
- Gera, P.; Salac, D. Modeling of multicomponent three-dimensional vesicles. Comput. Fluids 2018, 172, 362–383. [Google Scholar] [CrossRef]
- Salac, D.; Miksis, M. Reynolds number effects on lipid vesicles. J. Fluid Mech. 2012, 711, 122–146. [Google Scholar] [CrossRef]
- Canham, P. The minimum energy of bending as a possible explanation of the biconcave shape of the human red blood cell. J. Theor. Biol. 1970, 26, 61–81. [Google Scholar] [CrossRef] [PubMed]
- Helfrich, W. Elastic properties of lipid bilayers: Theory and possible experiments. Z. Naturforsch. C 1973, 28, 693–703. [Google Scholar] [CrossRef]
- Deuling, H.; Helfrich, W. The curvature elasticity of fluid membranes: A catalog of vesicle shapes. J. Phys. 1976, 37, 1335–1345. [Google Scholar] [CrossRef]
- Evans, E.A. Bending Resistance and Chemically Induced Moments in Membrane Bilayers. Biophys. J. 1974, 14, 923–931. [Google Scholar] [CrossRef]
- Barrett, J.W.; Garcke, H.; Nürnberg, R. Finite element approximation for the dynamics of fluidic two-phase biomembranes. ESAIM M2AN Math. Model. Numer. Anal. 2017, 51, 2319–2366. [Google Scholar] [CrossRef]
- Dziuk, G. Computational parametric Willmore flow. Numer. Math. 2008, 111, 55–80. [Google Scholar] [CrossRef]
- Laadhari, A.; Saramito, P.; Misbah, C.; Székely, G. Fully implicit methodology for the dynamics of biomembranes and capillary interfaces by combining the Level Set and Newton methods. J. Comput. Phys. 2017, 343, 271–299. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Front propaging with curvature deppend speed: Agorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Laadhari, A.; Székely, G. Eulerian finite element method for the numerical modeling of fluid dynamics of natural and pathological aortic valves. J. Comput. Appl. Math. 2016, 319, 236–261. [Google Scholar] [CrossRef]
- Laadhari, A. Exact Newton method with third-order convergence to model the dynamics of bubbles in incompressible flow. Appl. Math. Lett. 2017, 69, 138–145. [Google Scholar] [CrossRef]
- Laadhari, A.; Szekely, G. Fully implicit finite element method for the modeling of free surface flows with surface tension effect. Int. J. Numer. Methods Eng. 2017, 111, 1047–1074. [Google Scholar] [CrossRef]
- Saramito, P. Complex Fluid Modelling and Algorithms, 1st ed.; Springer International Publishing: Cham, Switzerland, 2016; p. 302. ISBN 9783319443614. [Google Scholar] [CrossRef]
- Walter, J.; Salsac, A.V.; Barthes-Biesel, D. Ellipsoidal capsules in simple shear flow. J. Fluid Mech. 2011, 676, 318–347. [Google Scholar] [CrossRef]
- Zhang, T.; Wolgemuth, C.W. Sixth-Order Accurate Schemes for Reinitialization and Extrapolation in the Level Set Framework. J. Sci. Comput. 2020, 83, 1–21. [Google Scholar] [CrossRef]
- Beaucourt, J.; Rioual, F.; Séon, T.; Biben, T.; Misbah, C. Steady to unsteady dynamics of a vesicle in a flow. Phys. Rev. E 2004, 69, 011906. [Google Scholar] [CrossRef] [PubMed]
- Laadhari, A. Implicit finite element methodology for the numerical modeling of incompressible two-fluid flows with moving hyperelastic interface. Appl. Math. Comput 2018, 333, 376–400. [Google Scholar] [CrossRef]
- Janela, J.; Lefebvre, A.; Maury, B. A penalty method for the simulation of fluid–Rigid body interaction. ESAIM Proc. 2005, 14, 115–123. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd ed.; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Casas, F.; Chartier, P.; Escorihuela-Tomas, A.; Zhang, Y. Compositions of pseudo-symmetric integrators with complex coefficients for the numerical integration of differential equations. J. Comput. Appl. Math. 2021, 381, 113006. [Google Scholar] [CrossRef]
- Guo, S.; Ren, J. A novel adaptive Crank-Nicolson-type scheme for the time fractional Allen-Cahn model. Appl. Math. Lett. 2022, 129, 107943. [Google Scholar] [CrossRef]
- Saramito, P. Efficient C++ Finite Element Computing with Rheolef, CNRS-CCSD ed.; Grenoble, France. 2020, p. 259. HAL version: V15. Available online: https://cel.hal.science/cel-00573970v16 (accessed on 26 September 2022).
- Zalesak, S.T. Fully multidimensional flux-corrected transport algorithms for fluids. J. Comput. Phys. 1979, 31, 335–362. [Google Scholar] [CrossRef]
- Fischer, T.M.; Stöhr-Liesen, M.; Schmid-Schönbein, H. The Red Cell as a Fluid Droplet: Tank Tread-Like Motion of the Human Erythrocyte Membrane in Shear Flow. Science 1978, 202, 894–896. [Google Scholar] [CrossRef] [PubMed]
- Keller, S.R.; Skalak, R. Motion of a tank-treading ellipsoidal particle in a shear flow. J. Fluid Mech. 1982, 120, 27–47. [Google Scholar] [CrossRef]
- Kantsler, V.; Steinberg, V. Transition to Tumbling and Two Regimes of Tumbling Motion of a Vesicle in Shear Flow. Phys. Rev. Lett. 2006, 96, 036001. [Google Scholar] [CrossRef] [PubMed]
- Laadhari, A.; Barral, Y.; Székely, G. A data-driven optimal control method for endoplasmic reticulum membrane compartmentalization in budding yeast cells. Math. Methods Appl. Sci. 2023, 1. [Google Scholar] [CrossRef]
- Laadhari, A. An operator splitting strategy for fluid–structure interaction problems with thin elastic structures in an incompressible Newtonian flow. Appl. Math. Lett. 2018, 81, 35–43. [Google Scholar] [CrossRef]
- Gizzi, A.; Ruiz-Baier, R.; Rossi, S.; Laadhari, A.; Cherubini, C.; Filippi, S. A three-dimensional continuum model of active contraction in single cardiomyocytes. Model. Simul. Appl. 2015, 14, 157–176. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laadhari, A. Finite-Element Method for the Simulation of Lipid Vesicle/Fluid Interactions in a Quasi–Newtonian Fluid Flow. Mathematics 2023, 11, 1950. https://doi.org/10.3390/math11081950
Laadhari A. Finite-Element Method for the Simulation of Lipid Vesicle/Fluid Interactions in a Quasi–Newtonian Fluid Flow. Mathematics. 2023; 11(8):1950. https://doi.org/10.3390/math11081950
Chicago/Turabian StyleLaadhari, Aymen. 2023. "Finite-Element Method for the Simulation of Lipid Vesicle/Fluid Interactions in a Quasi–Newtonian Fluid Flow" Mathematics 11, no. 8: 1950. https://doi.org/10.3390/math11081950
APA StyleLaadhari, A. (2023). Finite-Element Method for the Simulation of Lipid Vesicle/Fluid Interactions in a Quasi–Newtonian Fluid Flow. Mathematics, 11(8), 1950. https://doi.org/10.3390/math11081950